
早期“图”式无人机
2000-06-07 19:31吴敏杰
航空知识 2000年6期
吴敏杰
研制无人机 起步于导弹
1956~1957年间,由安德烈·尼古拉耶维奇·图波列夫领导的编号为 О К Б-156的设计局可谓形势喜人,图-95洲际轰炸机正在扩大生产, 图-16正在批量生产,图-104客机的试验已经结束,而图-95飞机的军转民方案也已制订完毕。
不过,这些到没有难倒图波列夫,而此时此刻困扰他的是,苏联领导人赫鲁晓夫对开发导弹武器的兴趣与日俱增,因为当时所有的防空兵器在对付弹道导弹方面都显得无能为力。相反,北美洲的防空系统已经成为远程航空兵常规武器无法克服的障碍。
赫鲁晓夫“重导弹、轻轰炸机”的思想,使得苏联官方下决心研制导弹武器。这对于以研制轰炸机为主导的图波列夫设计局来说,的确面临着严峻考验。让图波列夫感到头疼的是,该设计局从1954年开始在图-95和米高扬的Х-20飞航式导弹基础上制造的“К-20喷气式武器系统”已经显得过时,因为在飞往美洲数小时的长途跋涉过程中,Х-20的载机图-95会被击落,而Х-20导弹本身的速度和飞行高度虽然与当时的最新型飞机相当,但也不能排除被超音速战斗机拦截的可能性,更不要说被地-空导弹拦截了,在当时地-空导弹被看作是对付飞机独一无二的“杀手锏”。
图波列夫认为:硬着头皮也得上!
图-121诞生 开无人机先河
图波列夫最终接受了导弹武器的研制,他们从研制巡航导弹起步,逐步发展到能研制无人侦察机、无人攻击机。
从某种意义上说,可以把巡航导弹看成是无人机的一种,它的构造和外形很像无人机,但与无人机不完全一样,比如,它只是一种具有一次性杀伤力的攻击武器,不能回收。而无人机则是具有侦察和攻击能力的无人飞行器,它用作侦察时可以回收,用作攻击时,既可以回收,也可以不回收。
研制导弹伊始,图波列夫设计局就以研制射程为9000~12000公里巡航导弹的庞大计划来激发订货人的兴趣,其计划具体的是研制发射重量为240吨的三级液态燃料火箭,其速度可达20000公里/小时,飞行高度50000米。在被动飞行段速度逐渐下降,即使在目标区30公里的上空,其速度也能超过7000公里/小时,但偏离指定点的距离不会超过10公里。
这个设计方案起源于二战结束前德国研制的А-9/А-10导弹和一种轨道轰炸机,当时该方案带有不可预知的技术风险。
1957年3月19日,苏联部长会议下达指示,要求图波列夫设计局研制巡航导弹,并建议在1958年第三季度拿出“Д”型巡航导弹的草案,对该型导弹性能的大致要求是:速度2500~2700公里/小时,飞行高度22000~25000米,航程9000~9500公里,
图波列夫分析了当时的形势,论证了研制“Д”型巡航导弹的可行性,认为他们要研制的正处在纸上谈兵的“Д”型导弹,与拉沃契金设计局从1954年开始研制的“暴风”(Б У Р Я )号和已经进入飞行试验准备阶段的米亚西舍夫设计局威力更大的“暴风雪”( Б У Р А Н )号巡航导弹相比,不论是在速度特性和高空飞行特性方面远远不及他们,因此,提出了研制与“Д”型导弹的最大速度和飞行高度相当的中程巡航导弹的建议。同年9月23日,前苏联政府又作出决定,要求图波列夫设计局研制航程3000~4000公里的“С”型巡航导弹,并要求在1958年底投入飞行试验。
在研制中程巡航导弹方面,图波列夫设计局也并非先行者。С·В·伊柳申设计局从1956年4月就开始研制用于装备潜艇的П-20巡航导弹,此导弹的射程为2500~3000公里,速度3200公里/小时,飞行高度20000米以上。在这之后一年,政府又下达了研制射程3200~3400公里的П-20С陆基巡航导弹的任务。至此,伊柳申设计局一直没间断从事П-20С陆基巡航导弹的研制工作。
凭借设计局自身的条件,图波列夫下决心超过伊柳申设计局。他利用在国家航空技术委员会和国家上层的特殊威望,找到了支持者,最后以研制П-20С导弹与研制“С”型导弹重复为借口,建议政府停止П-20С导弹的研制工作。虽然当时图波列夫设计局的“С”型导弹仍处在早期研制阶段,但政府在1959年4月1日还是作出了停止П-20С导弹研发工作的指示。
一向慎重的图波列夫为赢得政府批准,提出了“С”型导弹合理的飞行技术性能指标,其结构将主要使用当时已经开发出来的铝合金,并将使用带加力燃烧室的涡轮喷气发动机作为动力,其目的是避免出现“暴风”号和“暴风雪”号导弹在研制过程中碰到的耐热材料和采用冲压式发动机方面的难题。
“С”导弹,就是当时被称为图-121无人驾驶攻击机。该机的总体结构布局没有什么奇特的地方,其机身结构与切洛梅耶夫的П-5型导弹和别里耶夫的П-10导弹基本相似,其机翼为三角翼,三个尾翼面沿弹尾表面均匀分布,彼此间相隔120度。
图-121的机身长24.7米,圆柱形机身的直径为1.7米。该型机共由七大部分组成:头部两个舱用于安装第三舱的功能保障设备,第三舱为重约3吨的热核战斗部;第四舱和第五舱为焊接式承压燃料舱;第六舱上部密封,装有天文导航仪、自动驾驶仪和调节系统设备,下部为发动机;第七舱为尾舱。三角形机翼,采用多梁箱式结构,其后掠角为67度,机翼采用3.5%相对厚度的П-35ЦАГИ翼形,机翼面积61.192平方米,翼展8.4米,展弦比1.5。飞机尾部有三个全动式方向舵,相对厚度4.5%,采用П-35 ЦАГИ翼形,尾翼前缘的后掠度为45度,后缘后掠度2.3度,尾翼总面积1.88平方米。
50年代中期,无人机自动飞行控制系统的发展仍处在起步阶段,因此在1.5小时的飞行过程中,图-121的航向误差能达到数10公里。这样,即使导弹战斗部威力较大,也会大大影响作战效能。为尽量减小这种误差,图-121又采用了“大地-А И”天文导航系统和А П-85型自动驾驶仪,并由这两种系统联合工作,来控制导弹的飞行。
“大地-А И”天文导航系统由航空工业部第一科研所(Н И И-1)研制,它是在“暴风”号巡航导弹使用的天文导航系统的基础上研制出来的,由三轴陀螺稳定仪、天文望远镜、垂直陀螺和航向计算装置组成,借助于恒星观测方法,它能提供导弹在整个飞行过程中的角度和方位校正,恒星观测则通过安装在垂尾底部的光学弦窗来进行,光学舷窗的结构与“暴风”号巡航导弹的一样。导弹发射5分钟后能达到12公里的飞行高度,这时导弹开始利用天文导航仪提供的数据飞行。
为保障图-121的起飞,在其翼下装有一对推力57~80吨的П Р Д-52型固体燃料助推器,每个助推器带有1.55吨Н М Ф-2型燃料。可拆下的外翼、舵面和助推器被固定在СТ-10型发射车上,导弹的部分控制设备和战斗部由另外的专用车辆运往发射阵地。
在预发射状态,导弹与地面呈15度夹角。发射时首先启动的是КР-15-300型发动机,在地面它能以加力状态工作45秒钟。助推器启动后以10吨的力量冲断СТ-10发射架导轨上的导弹固定螺栓。导弹发射3.75~5秒后,飞行速度可达167米/秒,高度约100米,这时助推器燃料用尽,自动与导弹分离,降落到距发射架500~1500米远的地方。
在进入巡航飞行段前,导弹的飞行高度是19.9公里,速度达到2660公里/小时,这时导弹携带的16吨ТС或Т-1号煤油已被耗去40%。在进入巡航段后,导弹通过操纵发动机加力推力油门仍基本保持这一速度,飞行高度逐渐增加到24.1公里。在距目标大约45公里的时候,导弹沿弹道进入俯冲阶段,在到达指定区域后,导弹自行爆炸。
1958年下半年,图波列夫设计局亚乌泽试验工厂准备好了首批图-121的试验产品,并于当年冬天开始在法乌斯托沃国家航空技术研究所的靶场上进行发射系统、发射助推器等的点火试验,同时图-121无人攻击机的模拟机也进行了试飞。根据试验结果,对发射装置的结构和其它系统进行了相应的改进。
1959年春天,经过试验改进后的图-121无人机的首架样机运抵设计局的弗拉基米罗夫卡基地,准备进行飞行试验。在对样机进行必要的检查和调整后,于当年8月25日进行了首次成功发射。随后,根据飞行试验计划又进行了4次发射,以证实全套装置所有部件的性能。
正当图-121无人机准备投入批量生产时,苏联部长会议下达指示,停止所有不具备发展前景的喷气式武器的研制工作,其中包括图-121无人驾驶攻击机项目。原因是:
首先,由М·К·扬格利领导研制的航程为2000公里的Р-12弹道导弹已经于1959年底开始装备部队,其进攻精确度几乎是图-121无人驾驶攻击机的两倍,Р-12可采用井式发射,其隐蔽性和安全性也大大高于图-121;
其次,图-121已成为1958年开始在欧洲部署的美国“奈基”地空导弹的理想靶标,这种导弹能摧毁30公里高空的超音速目标;
第三,图-121的大航程优势已失去实际意义,因为大部分欧洲目标已处于部署在苏联西部的Р-12导弹的有效射程内,而打击极个别的远距离目标可用当时已经研制出来的威力更大的Р-14弹道导弹,这种导弹也是由扬格利设计局研制的,该导弹于1961年装备部队。
图-121数据:翼展8.4米,机长24.77米,机身直径1.7米,起飞重量35000公斤,巡航速度2775公里/小时,最大航程3880公里,巡航段飞行高度19900米,接近目标时的飞行高度为24100米。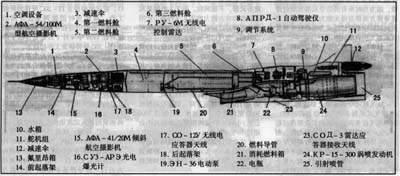
图-123服役 无人机成功之作
在研制图-121的同时,图波列夫设计局已着手研制图-123无人驾驶攻击机,它与图-121结构相似,区别在于增加了重量,扩大了外廓尺寸。为实现远距离飞行攻击洲际目标,增加了飞机的油料储备,并安装了НК-6新型节油涡轮风扇发动机,其最大推力为18~22吨。不过图-123项目在草案设计阶段就被迫停止了,原因与图-121一样。
前苏联政府在1960年7月16日,下达了研制远程无人驾驶系统的指示,该系统的正式代号为Д Б Р-1(“鹰-1”)。该系统中的无人驾驶侦察机重新起用了图-123这个代号。它主要用于对导弹阵地、机场、工业目标、港口、部队集结地、舰队、防空系统和导弹防御系统等远距离目标进行空中侦察,还能对大规模杀伤性武器的使用结果进行检验。政府对图-123无人侦察机提出基本性能要求是:航程3500~4000公里,速度2700~3000公里/小时,飞行高度20000~25000米。
在接到上级指示后,图波列夫设计局又开始了图-123无人驾驶侦察机的研制。图-123的机体结构和气动布局与图-121基本相同,外形上的区别是图-123机体呈圆形,向尾部逐步过渡为椭圆形,加上要安装侦察设备,飞行过程也有所变化,所以图-123的结构布局多少有些变化,由于设备舱的容积加大,导致无人机的机身头部加长。
图-123也装一台КР-15-300型涡喷发动机,但使用寿命延长到了50小时。机翼下方装有两台推力75000~80000公斤的П Р Д-52型固体燃料助推器。
与一次性使用的图-121无人驾驶攻击机相比,对图-123无人侦察机的性能要求提高了很多,首先要求它必需具有沿侦察航线飞行的高准确性,所以图-123采用了带速度与偏流角多普勒计算器的控制系统,但该系统却无法保障将无人机引导到半径仅10公里的侦察情报传递区。因此,要求图-123在完成侦察任务后要能返回到距情报传递区约300公里的地区,这时它就能被П-35型地面雷达发现,尔后地面操作员通过专门的无线电指令,将图-123引导到情报传递区。同样,根据地面指令,无人机发动机关车,然后抛掉剩余燃料,无人机的速度随之下降到1.75~1.3马赫,这时装在无人机方向舵底部容器内的减速伞启动并打开,伞衣面积为34平方米。在距地面4公里时,无人机的头部与机体脱离,头部的回收靠的是三个依次打开的减速伞,主伞的伞衣面积为158平方米,它能使无人机头部在接近地面时的下降速度降低到6米/秒左右。着陆时的冲击能量由四轮起落架抵消,而无人机的其它组成部分在着陆后完全报废。
“鹰-1”无人驾驶侦察机系统于1961年9月参加了由国防部组织的国家试验,当年共进行了5次发射试验,其中第1次和第5次发射失败。1962年又进行了4次发射,从1963年4月28日到12月24日又进行了5次飞行试验,尽管第4次试验只取得了部分成功,无人机没有返回指定地区,但空军司令在这次发射后,却批准了国家委员会建议图-123开始服役的申请。根据1964年5月23日的政府令,“鹰-1”无人机系统正式装备部队。
1964年,图-123在沃罗涅日的第64号飞机厂投入批量生产,前苏联西部边界地区的空军航空兵侦察分队先后装备了52架图-123无人机。1972年,“鹰-1”无人机系统停产,1979年全部退出现役。退役后图-123被改装成靶标,用于防空导弹部队的训练与演习。目前,唯一一架幸存的图-123无人驾驶侦察机被存放在位于莫斯科的航空博物馆内。
图-123数据:翼展8.414米,机长27.825米,机身直径1.7米,起飞重量35610公斤,巡航速度2700公里/小时,最大航程3560~3680公里,巡航段飞行高度19000米,接近目标时飞行高度22800米。
图-139夭折 形势发展必然
根据苏联军事工业委员会对“鹰”式无人驾驶侦察系统提出的要求,图波列夫设计局在研究过程中曾设想制造可以完全回收的无人驾驶侦察机,并提出了实施这一设想的两种方案。第一种是制造有人驾驶的图-123方案,代号是图-141(图-123П)或“鹰-П”。
根据预先设想,这种侦察机从发射阵地上发射出去,而执行任务、返回本土和降落则由飞行员驾驶完成,结果这项方案被否决,原因是它根本没有体现无人驾驶侦察机的优势,即高度的作战独立性和遇到强火力攻击时的作战稳定性,而且其过载飞行员也难以承受。第二个方案是在图-123无人机的基础上研制其回收改进型。1964年“鹰-1”开始批量生产后,图波列夫设计局马上着手研制可完全回收的无人驾驶侦察机系统,该系统命名为Д Б Р-2“鹰-2”,这种可完全回收的无人机代号为图-139。
根据方案的设计要求,图-139无人驾驶侦察机在完成任务后降落重量是13500公斤,与此同时还要考虑到它必须完成不少于10次的再次起飞和在事先没有准备好的降落场上着陆。图-139是在批量生产的图-123无人机的基础上设计而成的,它与后者的区别是图-139采用了首架图-144超音速客机实验机使用的高升力翼型。
为保证图-139能够实现水平软着陆,以保障飞机结构最小限度地受损,飞机采用了伞衣面积为1200~1500平方米的新型着陆减速伞。同时还安装了固体燃料制动发动机以实现减速,该发动机可根据接地探测器的信号自动起动。当无人机进入软着陆后,减速伞会被一个专用系统转挂到接近飞机重心的部位,以确保飞机垂直降落速度大约10米/秒。在接近地面时,由接地探测器信号起动的制动发动机开始工作,它可使图-139的垂直下降速度进一步降低到2~3米/秒。
60年代后期,图波列夫设计局完成了图-139无人驾驶侦察机的设计,研制出了试验机,并在60年代末70年代初进行了飞行试验,但很快图-139计划和其它所有后续的陆基战略超音速无人驾驶侦察机的研发工作都被取消。原因是:第一,当时已经在米格-25基础上成功地研制出在作战使用上速度更快、机动性更强的有人驾驶侦察机;其次,在已密集部署各种防空兵器(其中包括“奈基”地空导弹装置)的欧洲战区,“鹰”式无人机能否成功地执行侦察任务已成问题。
尽管图-121无人驾驶攻击机刚开始试验就被枪毙,图-139也胎死腹中,但图波列夫设计局在早期无人机的研制过程中所积累的经验和取得的成果,为其后来成功研制“雨燕”亚音速战术无人机和“航班”战术无人机打下了坚实的基础。 ■
猜你喜欢
热带作物学报(2021年1期)2021-02-22
航空世界(2019年3期)2019-10-11
儿童故事画报·智力大王(2019年12期)2019-02-02
科技信息·中旬刊(2018年9期)2018-10-21
无人机(2018年1期)2018-07-05
百科探秘·航空航天(2017年3期)2017-07-12
航空模型(2016年5期)2016-07-25
航空世界(2016年4期)2016-07-14
百科探秘·航空航天(2015年12期)2015-11-07
舰船科学技术(2013年3期)2013-08-15
