隧道危化品车辆通行安全管控系统研究与应用
2025-03-04 00:00:00岳鹏程
物联网技术 2025年5期


摘 要:为了解决隧道内无法完备获取危化品车辆信息和现有的视频事件监测技术无法准确地对隧道内的危化品车辆进行事件监测等难题,搭建了隧道危化品车辆通行安全管控系统。通过在隧道出入洞口加装高清卡口摄像机以及在隧道洞内安装高清摄像机和多目标追踪雷达,实现了隧道通行车辆信息的前端采集。采用HOG+SVM危化品车辆辨识算法,从隧道出入口采集的隧道通行车辆图像中辨识出危化品车辆。在隧道内部采用雷视融合+AI算法实现对危化品车辆的跟踪和事件监测。通过联动隧道监控系统,向隧道洞口和隧道内的情报板发布预警信息,同时将隧道危化品车辆通行信息向相关管理平台共享。目前,系统已在某高速公路特长隧道进行应用。系统上线至今,发布危化品车辆过隧道预警信息596条,识别危化品车辆在隧道内异常事件72起。危化品车辆辨识准确率为96.7%,隧道内危化品车辆异常事件识别准确率为99.5%。实践证明,该系统准确度高、可靠性强,对于提升危化品车辆穿越隧道的安全管理水平具有显著效果。
关键词:跟踪识别;危化品车辆;HOG特征提取;SVM;事件监测;雷视融合
中图分类号:TP39 文献标识码:A 文章编号:2095-1302(2025)05-0-04
0 引 言
近年来,我国不断加强危险货物公路运输安全管理,危险货物运输安全形势呈现持续向好的态势,但并没有彻底遏制住事故频发多发的势头,危险货物公路运输安全管理方法还需在实践中不断探索,持续加强和完善[1]。2023年11月7日,四川雅安S8邛名高速名山服务区一油罐车发生爆炸,燃烧引燃旁边两辆货车,事故造成2人死亡、2人受伤。危险货物道路运输呈现高安全风险、低发生概率的特征,尤其是对隧道内危化品车辆运输安全需进行重点关注。
危险货物具有性质活泼、稳定性差的化学特性,在道路运输过程中容易发生爆炸、泄漏、腐蚀等安全风险极高、危害性极大的重大事故。事故发生后,还容易引起次生事故。危化品车辆的隧道事故相比普通道路事故具有密闭空间内救援难度大、灾害发展更迅猛、破坏性更大等特点。危化品车辆在隧道内发生事故,将对人们的生命安全、财产安全以及环境安全都造成巨大的威胁和极大的破坏[2]。交通运输部要求运输企业必须为“两客一危”车辆安装符合《道路运输车辆卫星定位系统车载终端技术要求》(JT/T794—2011)的卫星定位设备,通过无线网络,接入全国重点营运车辆联网联控平台,实时上传“两客一危”车辆的动态信息和静态信息,具体包括:车牌号码及车牌颜色、卫星定位时间、经度、纬度、车辆行驶速度、车辆行驶方向、报警数据(如疲劳驾驶、超速、违法停驶等)。系统的建成在很大程度上弥补了传统道路运输管理手段的不足,基本解决了“看不见、听不到、管不着”的问题,也对危险货物道路运输信息化、道路运输的管理方式带来了革命性的影响,成为促进现代道路运输业安全发展的重要切入点和抓手。
危化品车辆一旦进入隧道,就会面临隧道内车辆实时位置、行车速度、载货状态等关键信息的获取难题。同时,现有的视频事件监测方式难以实现对隧道内的危化品车辆和多种车辆进行准确的事件监测,无法达到监管的要求[3]。此外,隧道本身的狭长管状半封闭空间结构特点决定了隧道内发生事故的后果更加严重,事故救援更加困难。因此,“高速公路危化品车辆过隧道”是安全管控的关键环节,如何提高高速公路危化品车辆过隧道的安全监管水平,减少人民群众生命财产损失,成为亟待解决的重要问题。
1 拟解决的主要技术问题
(1)危化品车辆进出隧道辨识与提醒警示
系统需要自动检测、辨识危化品车辆进出隧道事件,判断危化品车辆是否进入或驶出隧道。当检测到危化品车辆进入隧道,推送警示信息给隧道值守人员,提醒其密切关注危化品车辆的行驶状况;同时,联动隧道情报板和隧道广播向隧道内交通参与者发布危化品车辆同行的提醒信息,通过视觉、听觉多种方式提醒过往车辆保持车距、谨慎驾驶。当检测到危化品车辆正常驶出隧道口时,自动解除提醒警示。
(2)隧道内危化品车辆事件识别及报警
由于山体自然屏障对信号的阻碍,危化品车辆在隧道内行驶期间,全国重点营运车辆联网联控平台的GPS定位信息将无法发挥作用,此种情况下会影响事故预防和早期处置救援的效果。为此,实现危化品车辆在隧道内行驶状况的实时跟踪、事件识别以及告警机制,能够有效覆盖我国隧道内危化品车辆安全监管的盲区。如果辨识到危化品车辆在隧道内行驶过程中发生事件,则启动事件处理流程,将事件信息(车辆信息、货物信息、突发事件描述等)及时反馈给交警、路政、运营管理单位,按照应急预案采取针对性对策,做到早发现、早识别、早干预、早处置,从而有效遏制危化品车辆在隧道内发生重大事故的安全风险。
2 系统集成及功能实现
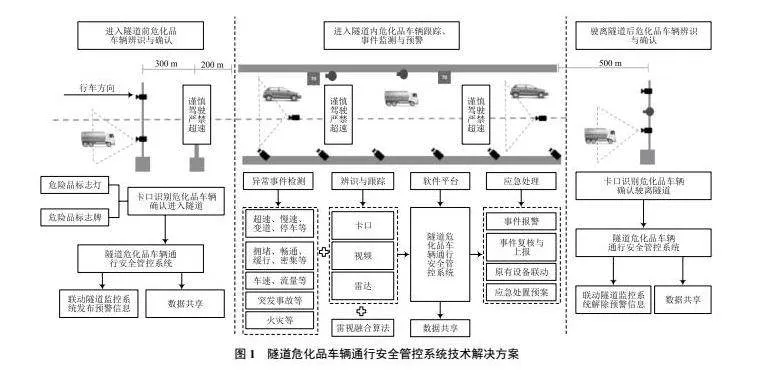
隧道危化品车辆通行安全管控系统技术解决方案如图1所示。
(1)危化品车辆在隧道内的跟踪辨识技术
系统在危化品车辆进隧道前,通过高清卡口识别危化品车辆的危险品标志灯和危险品标志牌等,确认危化品车辆进入隧道的通行信息,隧道危化品车辆通行安全管控系统联动控制隧道入口和隧道洞内的情报板以及隧道广播向交通参与者发布危化品车辆隧道内同行的预警提醒信息,并与运管局进行数据共享。
(2)实现危化品车辆的隧道内异常事件监测
系统在危化品车辆进入隧道后,通过卡口、视频、雷达及人工智能算法对隧道内危化品车辆的异常事件进行检测,包括超速、慢速、变道、停车、拥堵、火灾、交通事故、泄漏、爆炸等。
(3)危化品车辆通过隧道前、中、后的自动预警
系统通过卡口、视频、雷达及人工智能算法对隧道内危化品车辆的异常事件进行检测,实现与隧道监控系统、隧道内的机电设备进行数据互通,建立危化品车辆全过程的自动预警。
3 关键技术
3.1 基于HOG+SVM的危化品车辆辨识方法
危化品车辆辨识方法是通过高清卡口采集的车辆图像信息来辨识危化品车辆的典型特征,主要包括危险品标志灯和危险品标志牌。本文提出基于HOG+SVM的危化品车辆辨识方法。首先,收集样本,将大量的危化品车辆图片作为分类器的训练数据;其次,HOG特征提取,在图像中提取危化品车辆车头的危险品标志灯和车身的危险品标志牌作为特征;最后,SVM分类识别,利用SVM分类器从隧道入口高清卡口摄像机采集的车辆图像信息中识别危险品标志灯和危险品标志牌,从而辨识车辆是否为危化品车辆。
3.1.1 样本收集
根据《危险货物道路运输安全管理办法》相关规定,危化品车辆应安装、悬挂符合《道路运输危险物车辆标志》(GB 13392—2023)要求的警示标志。《道路运输危险物车辆标志》规定了不同种类危化品车辆标志牌的位置和形状[4],按照标准和规范,收集危化品车辆的样本图片,包括正样本和负样本。其中正样本涵盖各种类型的危化品车辆,而且含有背景、拍摄角度、光照、其他车辆等环境因素的变化,负样本是指除危化品车辆以外的高速公路交通参与车辆,包括小汽车、客车、特种车辆以及外型与危化品车辆相似的大中型货车等,样本尽可能考虑全面,符合实际应用场景。
3.1.2 特征提取
(1)图像预处理
首先对样本图像进行预处理,隧道洞口的卡口摄像机拍摄的实时图像是三通道的彩色图像,图像包含的信息量大。为了实现危化品车辆实时辨识,本文利用灰度化和局部阈值二值化对图片进行预处理,快速提取图像的有用信息,降低运算量,提高算法的运算效率。
(2)HOG特征提取
通过OpenCV中的函数HOGDescriptor( )初始化一个HOG对象,利用初始化后的HOG对象对预处理后的图片进行特征提取。
首先,通过计算和统计图像局部区域的梯度方向得到目标的梯度信息,用图像的局部区域的梯度方向的密度分布描述局部目标的表象和形状;其次,根据危化品车辆车头的危险品标志灯和车身的危险品标志牌尺寸确定图像感兴趣区域(ROI);然后,用尺寸为64×128的HOG特征描述子对图像感兴趣区域进行HOG特征的检测[6];最后,得到图像的HOG特征。HOG特征提取原理示意图如图3所示。
3.1.3 SVM分类器训练
(1)确定分类依据
危化品车辆的危险品标志灯和危险品标志牌是危化品车辆的独有标志,危险品标志牌在车辆侧面悬挂的位置如图4所示,危险品标志灯安装位置如图5所示。提取危化品车辆的HOG特征向量作为SVM分类器的分类依据。图像纹理的方向和颜色两相共同决定单个HOG特征向量的生成,单个HOG特征向量将有效表征危化品车辆上的危险品标志灯和危险品标志牌的形状和颜色。多个HOG特征向量的组合能够全面表征危化品车辆上的危险品标志灯和危险品标志牌的位置信息[7]。
(2)分类训练
得到了所有样本数据的特征数组和标签数组后,通过调用OpenCV的函数svm.train(hog_array, cv2.ml.ROW_SAMPLE, label_array),对危化品车辆样本与非危化品车辆样本进行分类训练。
3.1.4 模型测试
训练好危化品车辆辨识模型后,利用该模型进行危化品车辆辨识测试,具体步骤如下:
(1)设置函数detectMultiScale()的参数;
(2)调用函数cv2.imread()读入测试图片信息;
(3)把读入的测试图片的信息输入到函数detectMulti Scale()中,输出检测框的坐标和尺寸数据;
(4)把得到的检测框的数据输入到函数cv2.rectangle()中,在测试图片上加载出检测框;
(5)利用函数cv2.imshow()输出载有检测框的测试图片[7-8]。
3.2 基于“雷视融合+AI算法”的车辆异常事件的定位监
测及预警技术
隧道内狭长且半封闭,能见度低,传统的视频监控作为隧道内事件检测的路侧感知单元,容易受环境影响发生误报、漏报的情况[9]。雷达监测虽然不受天气等环境的干扰,但监测横向精准度低,不能精准区分目标的类型,不能持续跟踪监测危化品车辆在隧道内的异常事件。雷视融合技术结合了雷达和视觉传感器的优势[10],本文利用二维主动扫描式阵列雷达微波检测技术,对路面发射微波,以每秒20次的扫描频率可靠地检测路上每一车道的目标,准确区分机动车、非机动车、行人等,以及测量每车道的流量、平均速度、占有率、85%位速率、车头时距、车间距等交通数据,以及排队长度、逆行、超速、ETA等异常事件,并准确地测量区域内每个目标的位置坐标(x, y)与速度(Vx, Vy)。将雷达事件监测数据与隧道内高清摄像机的视觉传感数据通过AI算法进行融合,数据处理流程如图6所示。该技术的应用能够有效解决危化品车辆过隧道难以捕获位置信息和事件监测不准确的问题,能够精准定位和持续跟踪危化品车辆在隧道内通行的全过程,监测异常事件,为隧道危化品车辆通行安全管控系统提供可靠的基础数据。
4 结 语
本文系统已在某高速公路特长隧道进行应用,系统上线至今,发布危化品车辆过隧道预警信息596条,识别危化品车辆在隧道内超速、慢速、变道、停车、拥堵等异常事件72起,危化品车辆识别准确率为96.7%,隧道内危化品车辆异常事件识别准确率为99.5%。综上所述,系统能够准确辨识进隧道的危化品车辆,并及时向道路管理者和交通参与者发布预警信息,有效警示道路管理者和交通参与者危化品车辆过隧道的安全风险;系统能够准确识别危化品车辆在隧道内的异常事件,及时向道路管理者告警,提高此类事件的处置效率,降低此类事件的安全风险。实践证明,本文系统准确性高、可靠性强,应用该系统能够有效提高危化品车辆过隧道的安全管理水平,为隧道交通安全提供有力的保障。
参考文献
[1] 范文姬.公路隧道危化品车辆通行管控现状研究[J].公路交通科技,2020,37(z1):49-53.
[2] 危险货物道路运输安全管理办法[J].中华人民共和国国务院公报,2020(4):18-26.
[3] 张佳鹏,贾磊,杨莹,等.危化品车辆过隧道跟踪辨识和自动警示系统[J].电子技术与软件工程,2019(24):47-48.
[4] 中国道路运输协会.道路运输危险货物车辆标志:GB 13392-2005 [S]. [出版地不详]:[出版者不详],2005.
[5] 叶俊杰,高丙团,陈昊,等.基于HOG-SVM分类器的电力屏柜锁孔快速检测方法[J].计算机应用与软件,2023,40(1):134-138.
[6] LLORCA D F, ARROOYO R, SOTELO M A. Vehicle logo recognition in traffic images using HOG features and SVM [C]// 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). Hague,Netherlands: IEEE, 2013: 2229-2234.
[7] 黄威铭,吴焯标,陶铭.基于HOG和SVM的嵌入式行人检测与追踪系统设计与实现[J].物联网技术,2023,13(8):29-32.
[8] 闫乐乐,余宏杰.基于改进HOG特征提取与SVM分类器输电线路金具识别[J].安徽科技学院学报,2023,37(2):80-86.
[9] 付立家,尚康,陈丽阳.雷视融合公路隧道交通管控系统探究及应用[J].中国交通信息化,2023(10):106-109.
[10] 韦乐香,黎琮莹.基于雷视融合技术的全域车辆感知方案应用研究[J].西部交通科技,2023(7):197-199.