多障碍物场景下的视频传感器覆盖优化方法研究
2025-03-04 00:00:00陈海燕卢蕾
物联网技术 2025年5期

摘 要:在实际的视频传感器网络监测环境中,通常会存在较多障碍物对监测区域形成遮挡,从而产生监测盲区。此外,视频传感器初始部署时往往采用随机部署的方式,会导致部分传感器节点位于监测区域的边界处,使得其感知范围超出监测区域,从而影响整体覆盖效果。针对上述问题,提出了一种基于边界机制融合虚拟力算法的视频传感器网络覆盖优化方法。首先,采用边界机制将视频传感器节点的感知范围约束在监测范围内;其次,引入虚拟力算法,通过调整节点与节点之间、节点与障碍物之间的相互作用力,实现避障功能;最后,采用改进的鲸鱼优化算法进行覆盖优化。实验结果表明,该方法能够有效提升视频传感器网络的覆盖率。
关键词:视频传感器网络;多障碍物;边界机制;虚拟力算法;覆盖优化;节点部署
中图分类号:TP39;TN919.82 文献标识码:A 文章编号:2095-1302(2025)05-00-05
0 引 言
视频传感器网络(Video Sensor Networks, VSNs)在终端集成了音频、视频、图像等采集设备(如麦克风和摄像机等),从而大幅提升了传感器网络在声音、图像和视频方面的采集与处理能力[1],能够获取更为丰富、全面的待监测对象的信息。视频传感器网络已被广泛应用于环境监测[2]、气象监测[3]、城市交通管理[4]等多个领域。目前,视频传感器网络大多采用随机部署的方式,直接投掷或洒抛在待监测区域,这种部署方式往往会导致视频传感器网络在待监测区域内形成覆盖重叠或空洞,导致待监测区域内的目标无法得到有效覆盖。为了实现视频传感器网络对待监测区域的无缝覆盖,需要合理地部署视频传感器网络,对视频传感器节点的位置和方向进行调整。同时,在实际的监测环境中,往往会出现各种障碍物,如建筑物、山脉等,并且部署在监测区域边界处的传感器节点的感知范围会超出监测区域,影响网络的整体覆盖效果。因此,需要对障碍物场景下的视频传感器网络进行覆盖优化,确保待监测区域的全面覆盖,降低部署成本。
文献[5]针对监测区域存在障碍物的VSNs覆盖优化问题,提出了一种改进的竞争群优化方法,该方法通过结合虚拟力和Vironoi图来提高网络的覆盖性能。文献[6]针对多障碍物场景下野生动物监测的视频传感器节点部署问题,提出了一种针对受障碍物影响的虚拟力与粒子群融合的视频传感器网络覆盖优化算法,有效提高了节点在障碍物场景中的覆盖率。文献[7]提出了一种基于粒子群算法的面向三维感知有向传感器节点的网络覆盖优化算法,通过调节重叠覆盖区域、有效覆盖区域与障碍物遮挡区域之间的相互作用力,有效提高了网络的覆盖率。文献[8]针对特定地理位置和存在障碍物情况下的无线传感器网络随机部署问题,提出了一种高效的自主部署方案,通过使用避障虚拟力算法,增强网络覆盖范围,并确保存在障碍物时的网络连接。
综上所述,针对障碍物场景下的视频传感器覆盖优化,考虑节点与节点之间、节点与障碍物间的相互作用力,可以有效提高网络的覆盖率。因此,本文针对多障碍物场景下视频传感器网络节点的部署问题,在改进鲸鱼优化算法的基础上,提出了一种边界机制融合虚拟力算法的视频传感器网络覆盖优化方法,即BVFA+SGWOA(Boundary Virtual Force with Second Generation Whale Optimization Algorithm),实现了对监测区域的覆盖优化。该方法不仅能使节点在部署过程中有效避开各种形状的障碍物,还能将超出边界的节点的感知范围约束在监测区域内。
1 多障碍物场景下的有效覆盖面积
假设监测区域是面积为L×L的二维封闭平面 ,在此监测区域中随机部署N个视频传感器节点{s1, s2, ..., sN}。
为了使多障碍物场景下的视频传感器网络覆盖时使用最少的节点,且在避障前提下,使得有效覆盖率最大化,可以将多障碍物场景下的视频传感器网络覆盖率最大化问题表述为:找到一组lt;α*1, α*2, ..., α*Ngt;的视频传感器节点的最优有效覆盖率,在避免障碍物阻挡的情况下,使得目标函数pr(α*1, α*2, ..., α*N)取得最大值,其数学表达式如下:
2 多障碍物场景下视频传感器网络覆盖优化问题分析
本文在改进的鲸鱼优化算法(SGWOA)的基础上,对多障碍物场景下的障碍物规避和分布在边界区域的边界节点的处理方法进行研究,提出了一种基于边界机制和虚拟力(BVFA)的视频传感器网络覆盖优化算法。该算法将传感器节点视作虚拟势场中的电荷,各电荷之间都存在引力或斥力。通过分析虚拟电荷与障碍物及边界节点之间虚拟力的相互作用,灵活调整传感器节点的感知方向,使其避开障碍物,并将边界节点的感知方向向监测区域旋转,从而显著提高网络覆盖率,增强算法的覆盖性能。
2.1 边界机制
为了解决边界节点感知范围超出监测区域的问题,利用边界机制方案来约束边界处的视频传感器节点,确保其感知范围不超出指定的边界,有助于提高视频传感器的覆盖率。边界机制[5]通常是用于约束候选解的群体在整个可行性空间中进行搜索,这种搜索机制的数学表达式如下:
2.2 虚拟力分析
为了研究虚拟力下的覆盖优化算法,对视频传感器节点的虚拟力进行分析,利用虚拟力来模拟传感器节点之间的相互作用。虚拟力被定义为传感器节点之间的排斥力或吸引力,通过虚拟力来优化传感器节点的位置和方向,能够解决传感器节点间的覆盖和重叠问题,可以有效提高整个视频传感器网络的覆盖性能。假设每个传感器节点si会受到来自其相邻传感器节点sj的吸引力或排斥力(Fij)和来自障碍物或边界处的吸引力或排斥力(Fiob),则视频传感器节点上的合力为:
2.2.2 视频传感器节点对障碍物或边界处的作用力
在实际的监测环境中,通常会存在各种形状的障碍物,并且处在边界区域的边界节点的感知覆盖范围会超出边界,此时障碍物或边界处会对传感器节点施加排斥力。图1所示为障碍物或边界处的受力分析图,其中ci是有向传感器节点的质心点,其位置是在扇形对称轴上,并且一个传感器节点有且只有一个质心点。在虚拟势场中,质心点会受到一个或多个质心点的斥力作用,视频传感器节点的监测区域中存在障碍物或节点处于边界区域时,障碍物和边界处任意一点pi到视频传感器节点质心的斥力分别为Fib和Fio,两者的合力为Fiob,因此当视频传感器节点的质心受到合力Fiob的作用时,传感器节点受合力的影响会沿逆时针方向转动。
假设diob是传感器节点si到障碍物或边界处bj的垂直距离,dth_iob是预先设定的传感器节点到障碍物或边界处的阈值距离。当diob小于dth_iob时,则障碍物或边界对传感器节点si产生排斥力,其表达式如下:
3 基于BVFA+SGWOA算法在多障碍物场景下的覆
盖优化
本文将SGWOA覆盖优化算法和BVFA算法相结合,提出了一种基于BVFA+SGWOA的多障碍物场景下的覆盖优化算法。
本文根据SGWOA算法的原理,首先将视频传感器节点看作鲸鱼个体,计算每只鲸鱼的适应度函数值,适应度函数值表示视频传感器节点的覆盖效果,对每只鲸鱼个体加入边界机制和虚拟力算法,保证每只鲸鱼的移动在设定的边界范围内,计算相邻鲸鱼间的相互作用力。假设当前最佳鲸鱼个体的位置X″为(X1″, X2″, ..., Xi″),其中Xi″=(xi″, yi″),鲸鱼个体的位置X j为(X1j, X2j, ..., Xij),则鲸鱼个体在最佳鲸鱼个体的影响下的最新位置X j_new为(X1j_new, X2j_new, ..., Xij_new)。在鲸鱼每次迭代时,由式(8)、式(9)和式(10)更新鲸鱼的位置和方向:
4 实验结果与性能分析
4.1 实验结果
本文在MATLAB2016a环境下进行实验仿真,节点随机部署在500 m×500 m的矩形区域内,随机部署形状不一的障碍物,其他相关参数设置见表1。
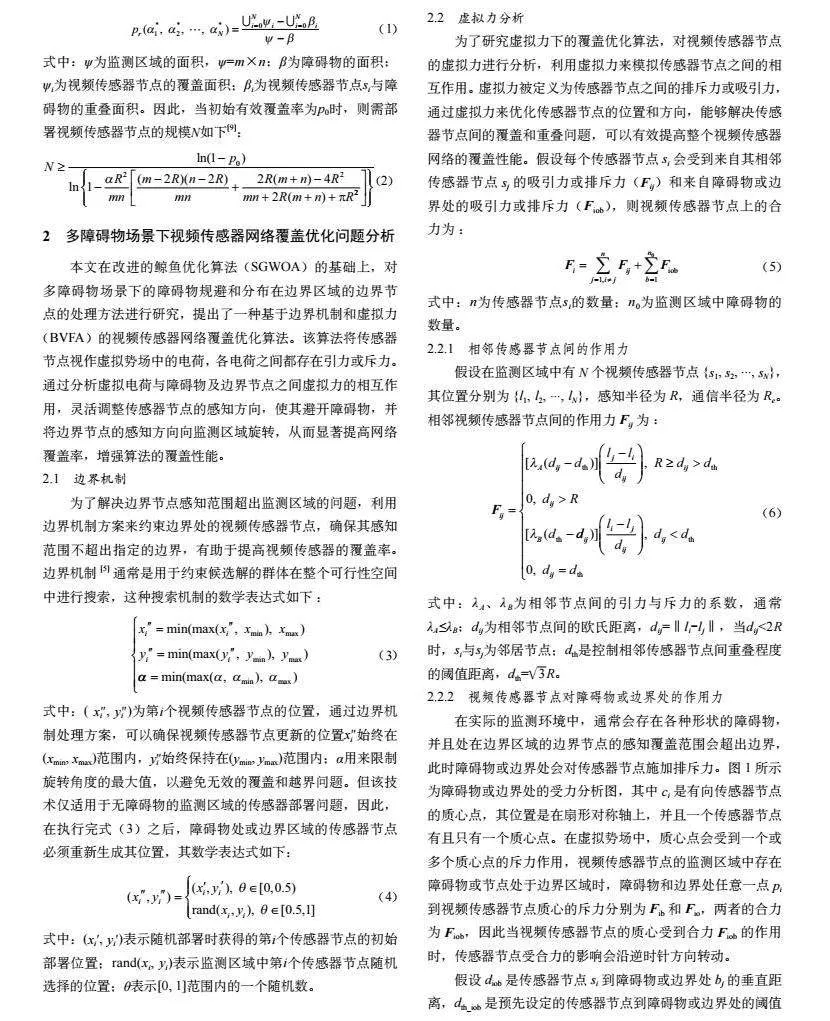
图2(a)所示为初始状态下传感器节点的分布图,其初始覆盖率p0=48.46%。此时由于在监测区域中存在障碍物,以及边界区域的边界节点超出监测区域范围,使得视频传感器网络覆盖率较低。采用多障碍物下的基于BVFA+SGWOA的视频传感器网络覆盖优化算法优化后的传感器节点分布图如图2(b)、图2(c)和图2(d)所示,分别为迭代次数t=200、t=400和t=700时的视频传感器覆盖优化状态图。从视频传感器覆盖优化状态图中可以看出,当迭代次数从t=0开始依次增加时,通过BVFA+SGWOA算法的视频传感器网络的覆盖优化性能显著增加,覆盖率从初始部署48.46%增加到74.36%,增加了25.9个百分点,并且在障碍物周围的各个传感器节点的方向也发生了变化,达到了避障的效果,尤其是边界处边界节点的覆盖性能也得到了显著改善,极大地减少了超出边界范围的边界节点数目。
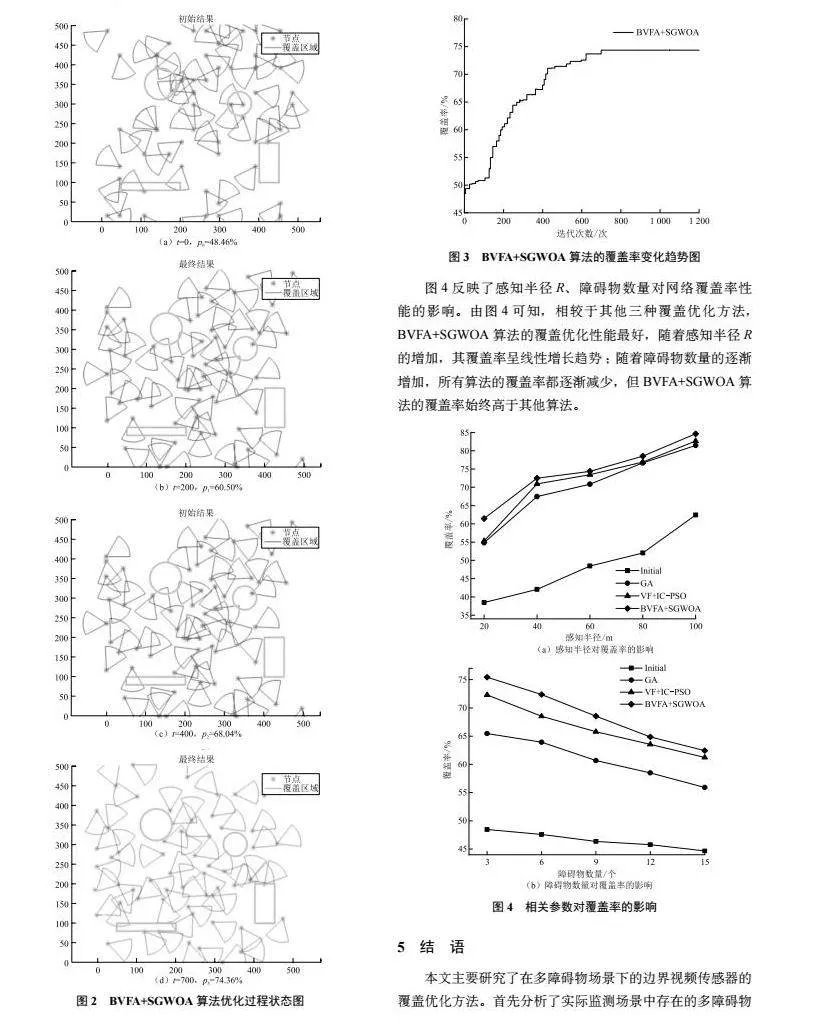
图3所示为BVFA+SGWOA算法的覆盖率变化趋势图。初始阶段随着算法迭代次数的增加,视频传感器网络的覆盖率呈明显上升趋势;之后随着迭代次数的逐步增加,视频传感器网络的覆盖率增长速度逐渐减慢;当迭代次数达到700次时,视频传感器网络的覆盖率增量趋于0,此时视频传感器网络的覆盖率为p=74.36%。
综上所述,当监控区域存在障碍物或边界节点落入边界区域时,基于BVFA+SGWOA算法能够有效避开障碍物的遮挡,并且可以通过与边界处的斥力作用,调整边界节点方向,从而显著提升视频传感器网络的覆盖性能。
4.2 性能分析
为了验证本文所提方法的有效性,分别对视频传感器网络参数和所提BVFA+SGWOA算法中各参数的变化对区域覆盖率的具体影响进行分析,并将本文方法与VF+IC-PSO[6]和GA[10]算法进行比较,以视频传感器网络的覆盖率作为指标来评估视频传感器网络的覆盖性能。
图4反映了感知半径R、障碍物数量对网络覆盖率性能的影响。由图4可知,相较于其他三种覆盖优化方法,BVFA+SGWOA算法的覆盖优化性能最好,随着感知半径R的增加,其覆盖率呈线性增长趋势;随着障碍物数量的逐渐增加,所有算法的覆盖率都逐渐减少,但BVFA+SGWOA算法的覆盖率始终高于其他算法。
5 结 语
本文主要研究了在多障碍物场景下的边界视频传感器的覆盖优化方法。首先分析了实际监测场景中存在的多障碍物和边界节点感知范围超出待检测区域的问题给视频传感器网络覆盖性能带来的影响,在此基础上提出了边界机制融合虚拟力算法的覆盖优化方法,通过边界机制将传感器节点限制在指定的区域中,然后引入虚拟力算法来调整传感器节点的感知方向,最后采用改进SGWOA算法来优化网络的覆盖性能。实验结果表明,相较于其他优化方法,本文所提出的覆盖优化算法性能更加优秀,能够有效提升视频传感器网络的覆盖率。
参考文献
[1]权恩猛. 视频传感器网络覆盖算法研究[D].绵阳:西南科技大学,2018.
[2] JAMROEN C, KOMKUM P, FONGKERD C, et al. An intelligent irrigation scheduling system using low-cost wireless sensor network toward sustainable and precision agriculture [J]. IEEE access, 2020, 8: 172756-172769.
[3] AL QUNDUS J, DABBOUR K, GUPTA S, et al. Wireless sensor network for AI-based flood disaster detection [J]. Annals of operations research, 2020, 319: 697-719.
[4] HILMANI A, MAIZATE A, HASSOUNI L. Automated real-time intelligent traffic control system for smart cities using wireless sensor networks [J]. Wireless communications mobile computing, 2020: 1-28.
[5] MUSIKAWAN P, KONGSOROT Y, MUNEESAWANG P, et al. An enhanced obstacle-aware deployment scheme with an opposition-based competitive swarm optimizer for mobile WSNs [J]. Expert systems with applications, 2022, 189: 116035.
[6] ZHANG Y. Research on video sensor networks coverage optimization method in obstacle scene [C]// 2023 2nd International Conference on Machine Vision, Automatic Identification and Detection(MVAID 2023). HangZhou, China: Journal of Physics: Conference Series, 2023.
[7]李娜,向凤红,毛剑琳,等. 多障碍场景的有向传感器网络覆盖优化算法[J]. 计算机工程,2015,41(4):19-25.
[8] ROUT M, ROY R. Dynamic deployment of randomly deployed mobile sensor nodes in the presence of obstacles [J]. Ad hoc networks, 2016, 46: 12-22.
[9]关志艳,黄向生. 随机障碍物下的有向传感器网络覆盖优化算法[J]. 小型微型计算机系统,2020,41(11):2380-2385.
[10]权恩猛. 基于遗传算法的多障碍区域最大覆盖优化 [J]. 工业控制计算机,2017,30(12):108-110.