基于粒子群算法的纯电动商用车转矩分配策略
2025-01-13 00:00:00田韶鹏方正
江苏大学学报(自然科学版) 2025年1期
关键词:粒子群算法















摘要: 针对纯电动商用车采用双电动机驱动时存在的转矩分配问题,提出基于粒子群算法的模糊控制策略.首先在Simulink/Stateflow软件中搭建整车动力系统物理模型,以粒子群算法为基础,进行整车转矩分配.由于计算量大,无法运用于实车,故根据粒子群算法的结果,结合传统项目经验,设计一个参数实时调节模糊控制器来进行转矩分配.该方法运行速度快,且基本达到粒子群全局优化的效果.验证与分析结果表明:与原车单电动机动力系统相比,采用该方法的双电动机动力系统能量消耗减少了12.08%;在双电动机动力系统下,该方法与平均分配控制策略相比,电动机总能量损失降低了13.09%.
关键词:" 纯电动商用车; 双电动机驱动; 转矩分配; 粒子群算法; 模糊控制策略
中图分类号: U462.3" 文献标志码:" A" 文章编号:"" 1671-7775(2025)01-0001-08
Torque distribution strategy for pure electric commercial vehicles
based on particle swarm optimization
Abstract: To solve the torque distribution problem of pure electric commercial vehicles driven by dual motors, the fuzzy control strategy based on particle swarm optimization(PSO) was proposed. The physical model of the vehicle power system was established in Simulink/Stateflow software, and the vehicle torque was distributed based on PSO algorithm. Due to the large amount of calculation and being not suitable for the real vehicles, according to the calculation results of PSO algorithm and the traditional project experience, the fuzzy controller with real-time parameter adjustment was designed to carry out torque distribution with high running speed and basically global optimization effect of PSO. The verification and analysis results show that compared with the original single motor power system, the energy consumption of the dual motor power system is reduced by 12.08%. Compared with the average distribution control strategy, the total motor loss is reduced by 13.09% in dual motor power system.
Key words:" pure electric commercial vehicle; dual motor drive; torque distribution; particle swarm algorithm; fuzzy control strategy
纯电动汽车由于其具有燃油车无法实现的无尾气排放、低噪声、能量转换效率高以及结构简单、易保养等优势,因而对环境保护和空气的洁净十分有益,维修保养工作量小,使用成本大大降低.在单电动机驱动系统已经落后,而分布式四电动机驱动系统的研究尚不成熟的当下,双电动机驱动系统的研究日益受到关注.文献[1]采用多目标粒子群算法,兼顾了电动机和电池的效率,仿真结果表明该算法可以有效地提高整车系统效率和驾驶里程.文献[2]将粒子群算法中的惯性权重设计为线性递减,以更好地分配双电动机转矩,仿真结果表明其经济性及续航里程得到了较好的改善.文献[3]提出一种模糊控制策略,首先基于动态规划算法得出结果,然后通过Simulink和Advisor联合仿真,得到该策略使动力电池电量保持在合理范围内的同时,还提高了整车燃油经济性.文献[4]研究发现由于动态规划算法很难在实车中实现,故提出了一种提取动态规划算法参数,以设计一种全新的基于规则的策略,进行双电动机转矩的分配,结果表明提取的策略效果可以达到原策略的90%,且可以应用于实车.综上,现有文献研究大多集中于粒子群算法,但粒子群算法存在计算量大,导致控制器计算时间长的问题,故很难应用于实车.
为此,笔者首先以双电动机总效率最优为优化目标,采用粒子群算法对双电动机转矩进行分配,然后以粒子群算法为基础,提取其中的计算结果,设计一种参数实时调节模糊控制器,能够达到和粒子群算法相仿的优化效果,但大大缩短计算时间,使其能应用于实车.
1 整车构型及动力总成物理模型搭建
1.1 整车构型
本研究中,需要将一辆纯电动商用车由单电动机改为双电动机.纯电动商用车适用场景广泛,需要具备灵活适应路况、较高实用性及高效性的特征,故选取的整车构型为2个相同参数的永磁同步电动机分别通过单速齿轮组和差速机构串联到前、后轴.车辆构型示意图如图1所示.
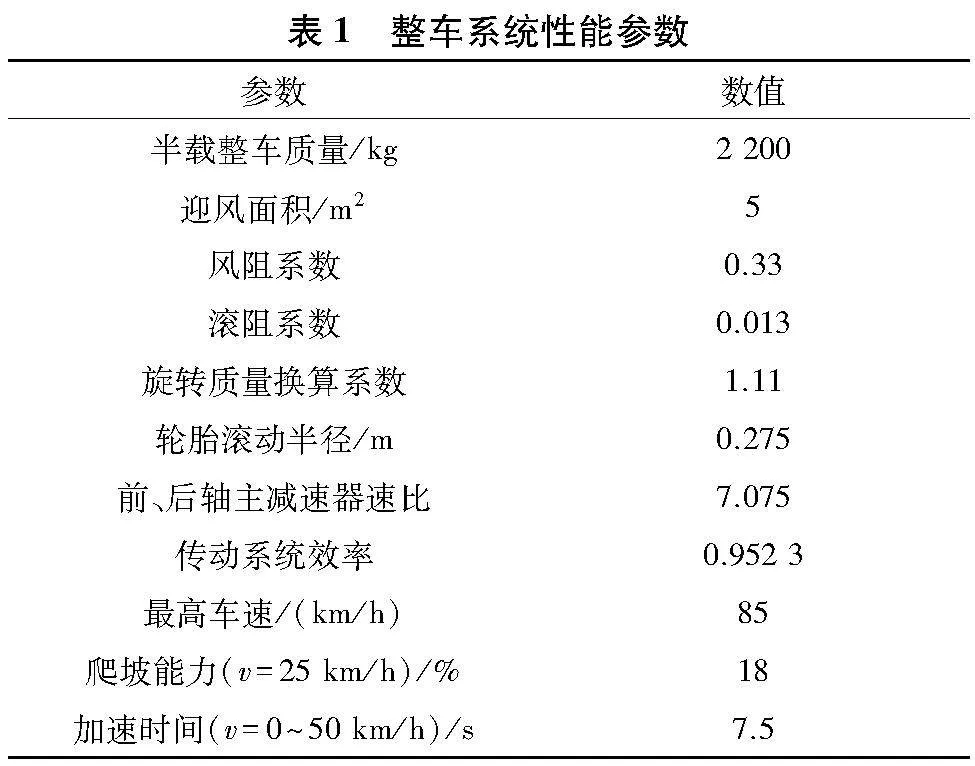
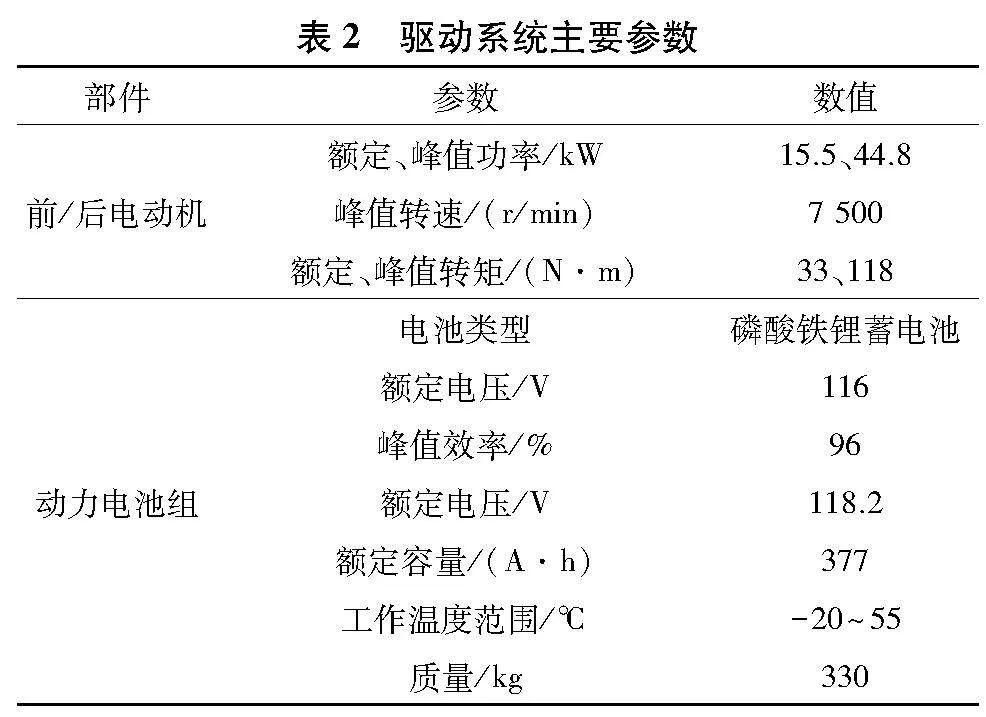
该种构型结构简单,能效提升潜力大,动态性能好.整车的能量流由电池传递到电动机,再通过单速齿轮组及差速器传递到各车轮[5].该商用车整车系统性能参数及驱动系统主要参数分别如表1和表2所示,v为车辆速度.
1.2 车辆纵向动力学模型
由于车辆垂直振动和车辆偏航对效率的影响很小,因而为了提高双电动机动力传动系统的效率,本研究的重点是构建纵向动力学车辆模型.一般来说,车轮上的总阻力包括空气阻力、加速阻力、滚动阻力和爬坡阻力[6].然而,本研究中,因为驾驶循环是在水平路面上进行的,所以忽略了爬坡阻力.因此,车轮上的总阻力为
式中: Fw为车轮上的总阻力;CD为空气阻力系数;A为车辆迎风面积;i为时刻;m为车辆质量;g为重力加速度;f为滚动阻力系数;δ为旋转质量换算系数;a1为车辆纵向加速度.
1.2.1 驾驶循环工况
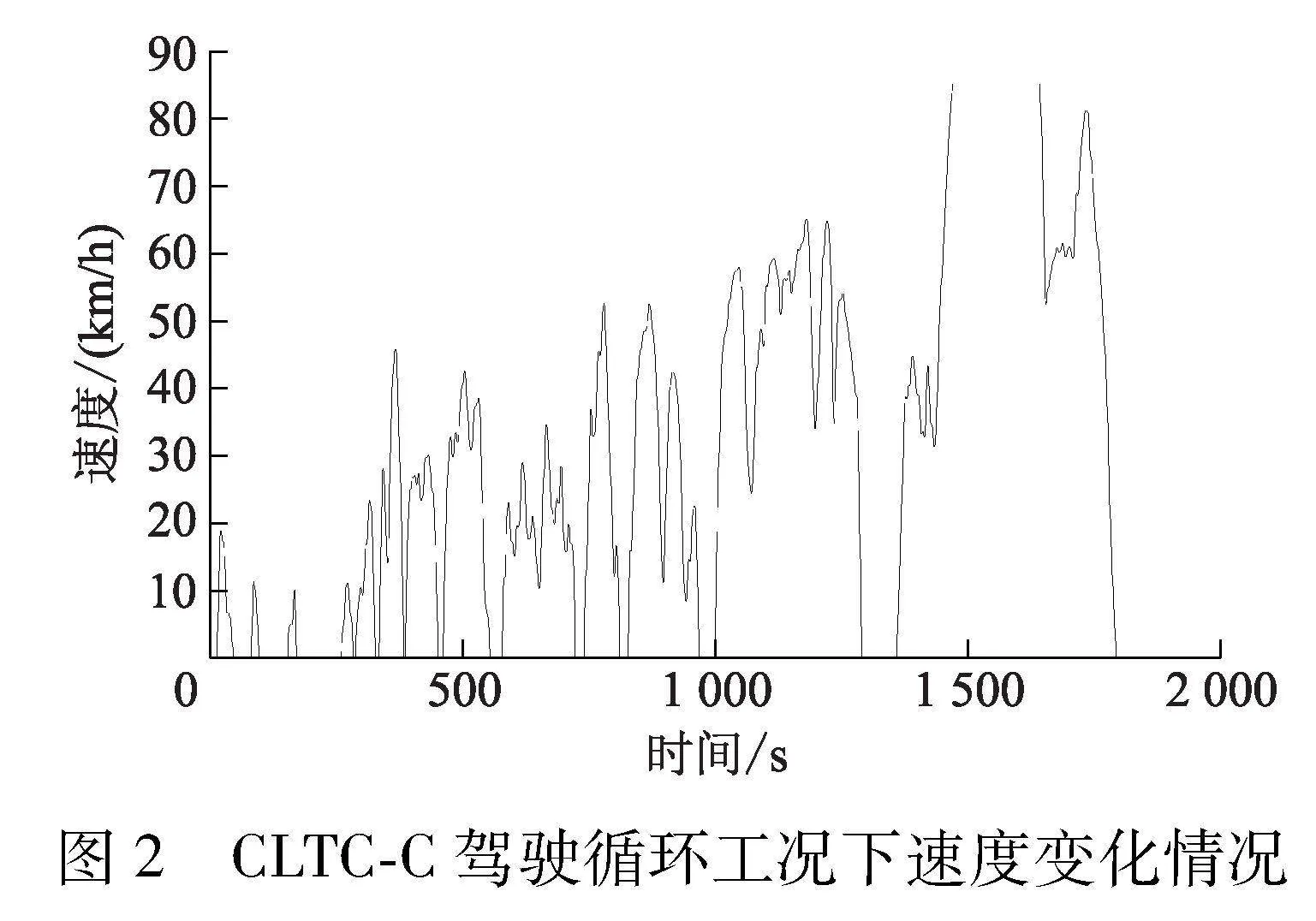
驾驶循环工况是标准测试后得到的一组数据.不少国家都提出了本国的驾驶循环工况标准,用以评估各种车辆的能耗、油耗和排放量,例如,《中国汽车行驶工况法(CLTC)》、《新标欧洲循环测试(NEDC)》、美国《城市测功机行驶计划(UDDS)》、《日本循环08(JC08)》、《世界轻型车辆试验程序(WLTP)》.其中CLTC-C是中国轻型商用车汽车行驶工况的缩写,该工况更能反映中国的商用车工况.为此,本研究中,选择CLTC-C作为目标车辆的标准测试循环工况,将最大速度为85 km/h的商用车作为目标车辆.因此,CLTC-C中速度超过85 km/h时将速度限制为85 km/h.图2为CLTC-C驾驶循环工况下速度变化情况.
1.2.2 驾驶员模型
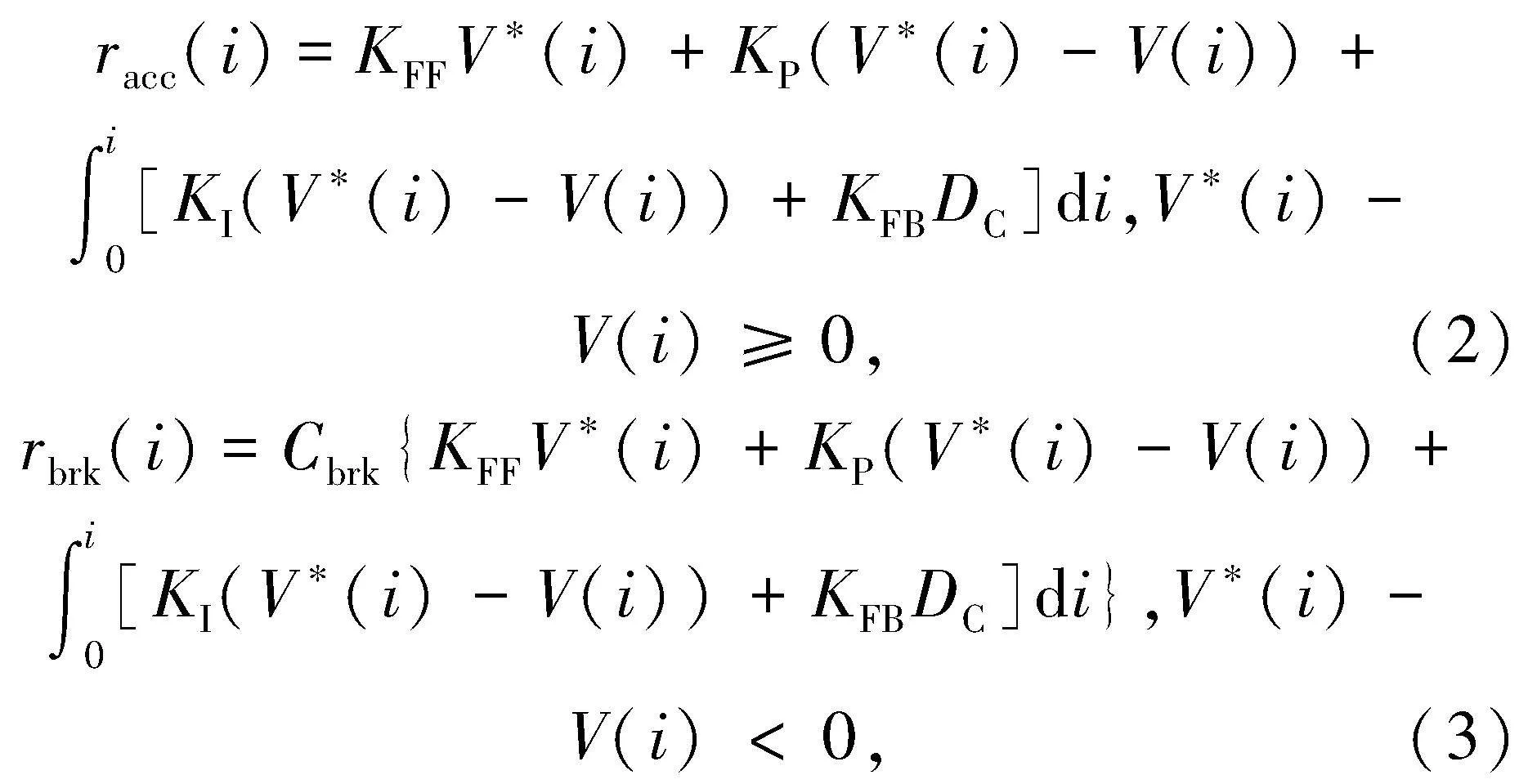
搭建驾驶员模型是为了让实际车速和所需车速(驾驶循环工况给出)相吻合,具体操作则是通过加速踏板指令和制动踏板指令实现.该驾驶员模型采用的是前馈–反馈PI控制器,即根据所需速度和实际速度之差,进行一系列计算后得出加速踏板指令和制动踏板指令.驾驶员模型指令计算如下:
式中:racc为加速踏板指令;KFF为前馈模块系数;V*(i)为期望速度函数;KP为比例增益;V(i)为实际速度函数;KI为积分增益;KFB为反馈模块系数;Dc为驾驶员模型给出的驾驶员命令;rbrk为要求的制动踏板指令;Cbrk为所需制动踏板指令的常数增益.
1.2.3 驱动电动机模型
该动力系统中的驱动电动机由2个相同的永磁同步电动机组成,用来驱动车辆或作为发电机来回收制动能量[7].对2台电动机进行台架测试,进而得到前、后电动机驱动效率和制动效率的MAP图,分别如图3和图4所示.电动机转速和电动机输出转矩均对电动机效率产生影响,即
ηEMk(i)=f(nEMk(i),TEMk(i)),k=1,2,(4)
式中:ηEM为电动机的效率;nEM为电动机转速;TEM为电动机的输出转矩.
1.2.4 电池模型
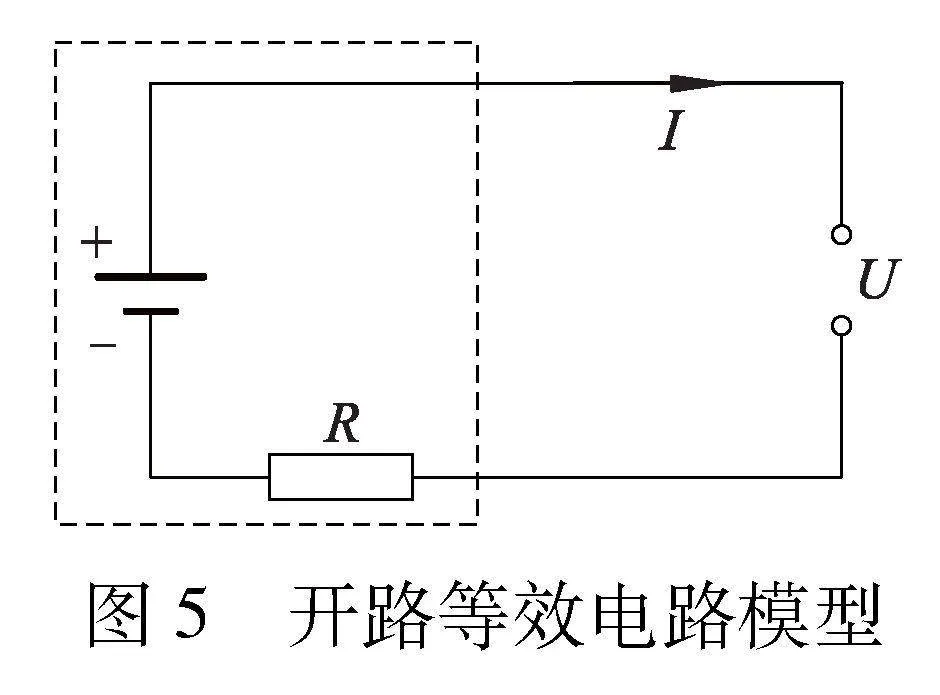
由于电池内部的电化学反应复杂,本研究中不予考虑,故采用了简易的开路等效电路模型,如图5所示.
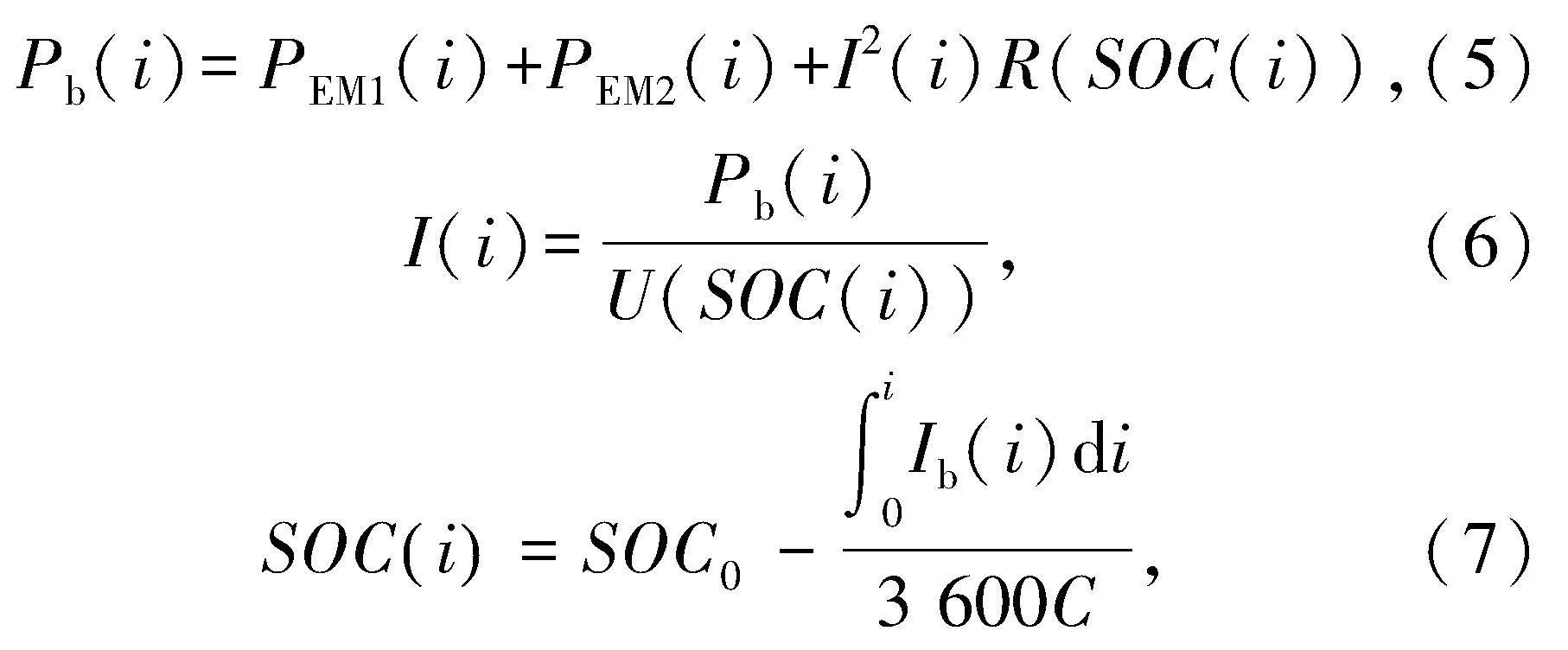
当电池输出功率为已知时,电池电流及SOC计算公式[8]如下:
式中:Pb为电池总功率;PEM1和PEM2分别为2个电动机的功率;I为电池电流;SOC(i)为i时刻的SOC;R(SOC(i))和U(SOC(i)分别为SOC(i)时的内阻和开路电压;SOC0为SOC的初始值;C为电池容量.
2 粒子群算法优化流程及步骤
2.1 粒子群算法优化问题描述
整车动力电池输出的功率主要包括2个电动机、零部件及电池自身消耗的功率,其中零部件消耗的功率较小,本文不对其进行研究.故本研究目标是通过设计最佳转矩分配策略来分配2个电动机转矩在需求转矩中的占比,从而使双电动机驱动系统的效率最优,即能量消耗最小[9].在行驶一段时间t后,整车双电动机能量消耗E[10]为
式中: P1、P2分别为2个电动机的需求功率;n1、n2分别为2个电动机的转速,本研究中,2个驱动电动机的转速相同,即n1=n2;T1、T2分别为2个电动机的分配转矩;η1、η2分别为已知转速和转矩时2个电动机的效率.
可见,本研究中,整车能量消耗就是双电动机的消耗功率,如果要使整车能耗最小,又要使双电动机消耗的功率最小,换句话说,就是要求双电动机动力系统的总效率最高.具体分配过程为先由加速踏板开度乘以根据电动机MAP图得到的转矩,然后将其分配给2个电动机.本研究中,以后轮转矩分配系数(即后轮分配转矩除以整车所需转矩)为优化变量;根据已知转矩和转速,结合电动机MAP图,即可得到2个电动机当前总效率,计算公式如下:
式中:η为2个电动机的总效率;Po为2个电动机的总输出功率;Pi为动力传动系统的输入功率,由蓄电池供电;Td为车辆按照驾驶循环工况行驶的需求转矩;α为后轮转矩分配系数,也是粒子群算法的优化变量,由于前、后动力系统结构对称,优化变量范围可简化为0~0.5.
双电动机总效率η为粒子群优化算法的适应度函数.对上述转矩分配过程用粒子群算法不断迭代,即可求出双电动机总效率,再由最优效率时的后轮转矩分配系数求出前、后电动机的转矩分配值.
2.2 粒子群算法流程
由于粒子群算法实用易懂,已经被大量用于各个学科领域.笔者采用在Simulink中的m函数编写的粒子群算法模块对双电动机进行转矩分配.即当它们所提供的转矩相加之和可以满足整车需求转矩的情况下,利用后轮转矩分配系数进行恰当的转矩分配,结合电动机MAP图计算适应度函数值[10].将以上过程重复迭代,直到收敛条件得到满足或者迭代次数达到最大值,得到的所有适应度函数最大值即为车辆最优效率.此时的后轮转矩分配系数也随之产生.粒子群算法中每一个粒子的位置代表了待求问题的一个候选解,所以本研究中粒子的位置即代表后轮转矩分配系数,为了使粒子群算法的实现过程更加直观,设计了粒子群算法流程图,如图6所示.
2.3 基于粒子群算法的转矩分配策略
首先,需要使用粒子群(PSO)算法对种群中的个体实施速度、位置的初始化[10].一般粒子群算法中每个粒子的速度和位置初始值是在优化变量范围内随机生成,这样就会导致很多粒子在优化进程早期集中于某一个小区域,造成优化进程中很快进入局部最优.所以笔者对初始化进程进行了特别处理,以提高优化进程早期的种群多样性.
将优化变量变化范围划分为s段(定义s为种群大小),然后将每个粒子的初始位置在其对应的划分段里随机形成.则每个粒子的速度及位置的表达式如下:
vN,I(T+1)=ξvN,I(T)+c1r1(pBestN,I(T)-PN,I(T))+c2r2(gBestN(T)-PN,I(T)),(10)
式中: vN,I(T)为第I个粒子的当前速度,I=1,2,…,s个;T为第T次迭代,T=1,2,…,∞;N为解空间的维数;ξ为惯性权重系数,用于从上一次速度特征继承到下一次迭代;c1、c2分别为个体学习和群体学习的学习因子,表征迭代更新速度的快慢;r1、r2、r3分别为0到1中间的随机数;pBestN,I(T)为第T次迭代中第I个粒子的最优位置;PN,I(T)为第T次迭代中第I个粒子的当前位置;gBestN(T)为经过T次迭代后整个群的最佳位置;PNmax和PNmin分别为位置范围的上限和下限.
其次,为了提高解的质量,随着迭代次数增加,惯性权重逐渐减小,因此在早期优化过程中,惯性权重会相对较大,以确保收敛速度[10].惯性权重计算式为
式中: ξmin和ξmax为惯性权重的指定最小值和最大值;Tmax为最大迭代次数.
由式(10)可知:如果c1较小,寻优进程中位置更新会比较缓慢;如果c2较大,寻优进程中粒子速度更新会太快,导致局部最大值不能持续寻优.为解决这个问题,引入压缩因子ψ对学习因子进行合理调节,进而调节粒子的更新速度,同时取消了速度更新的范围限制.压缩因子ψ的计算公式为
式中: D为综合因子,D=c1+c2.
最后,通过计算就可以得到全部个体的适应度函数值.适应度函数值的选择关系到算法的优劣程度,所以如何选择要有一定的标准.为确保算法的运行效率及速度,以免迭代时消耗过多的计算时间,适应度函数的表达式应该结构简单,计算量小.故适应度函数Fit表达式为
所有个体适应度函数最大值即为种群的适应度函数最优值.通过粒子群算法进行速度和位置的迭代,得到迭代后个体的适应度.然后将该次与上一次的适应度进行比较,用较大适应度取代较小值,作为每个粒子的个体极值.后续通过将每次的个体极值与迭代前的全局极值进行比较,个体极值大则成为全局极值,也就是群体最优值[10].将以上过程重复迭代,直到收敛条件得到满足或者迭代次数达到最大值.
2.4 粒子群算法的具体优化步骤
步骤①,对粒子的位置及速度进行初始化操作.根据式(11)对生成粒子的位置进行初始化,以保证种群多样性.
步骤②,对惯性权重及学习因子更新.非线性递减惯性权重和动态学习因子分别根据式(12)和(13)确定.
步骤③,对粒子的速度和位置更新.根据式(10)和(11)对每个粒子的速度和位置进行更新.
步骤④,进行适应度计算.由前文可知,总效率是本研究中粒子群优化问题的目标函数.在粒子群算法中,利用式(14)计算粒子的适应度,并将适应度最大的粒子位置作为最佳解.
步骤⑤,更新pBesti和gBest.计算适应度后,每个粒子应根据自身经验选择适应度最大的粒子的pBesti.此外,在所有pBest中,应选择具有全局最佳适应度的粒子作为gBest.在第1次迭代中,可以直接选择每个粒子作为自己的pBesti.
步骤⑥,设置停止规则,即一直迭代步骤①-⑤,直到收敛条件得到满足或迭代次数达到最大值.得到的最佳位置就是最佳转矩分配系数[11].
3 粒子群算法仿真结果及分析
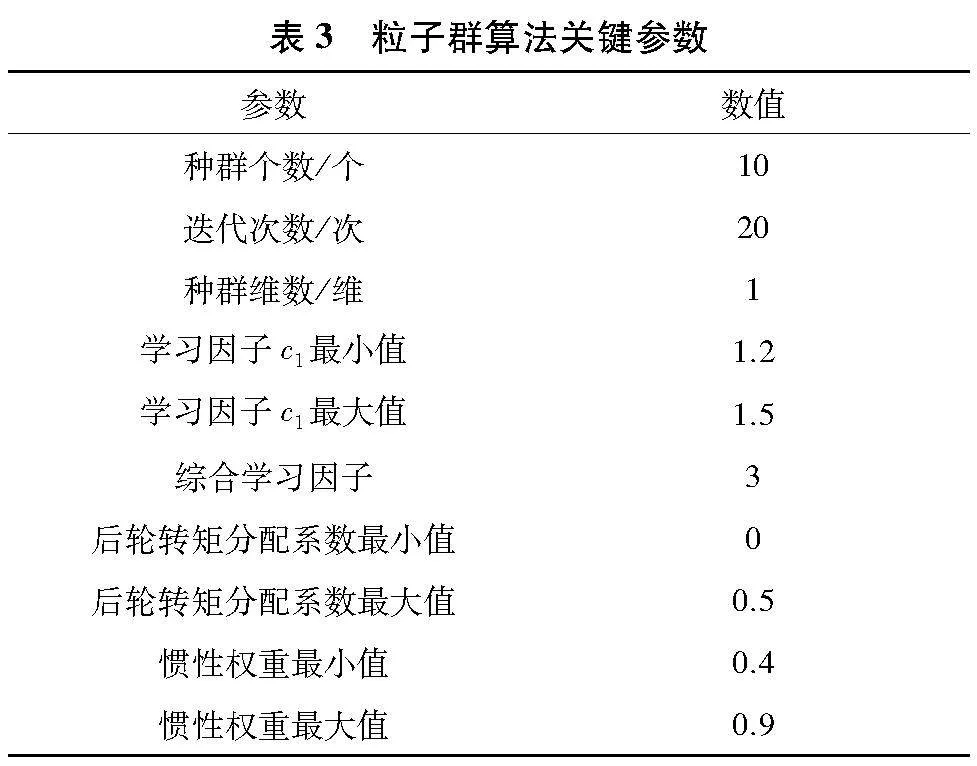
对平均分配策略和基于粒子群算法的策略进行了仿真分析.在Simulink/Stateflow中搭建整车物理模型,其中粒子群算法用S函数模块进行编写.本研究中粒子群算法的关键参数如表3所示.
3.1 粒子群算法策略仿真结果
在CLTC-C驾驶循环下对2种策略进行仿真,车速跟随情况如图7和图8所示,可以看出2种策略都能很好地进行车速跟随.
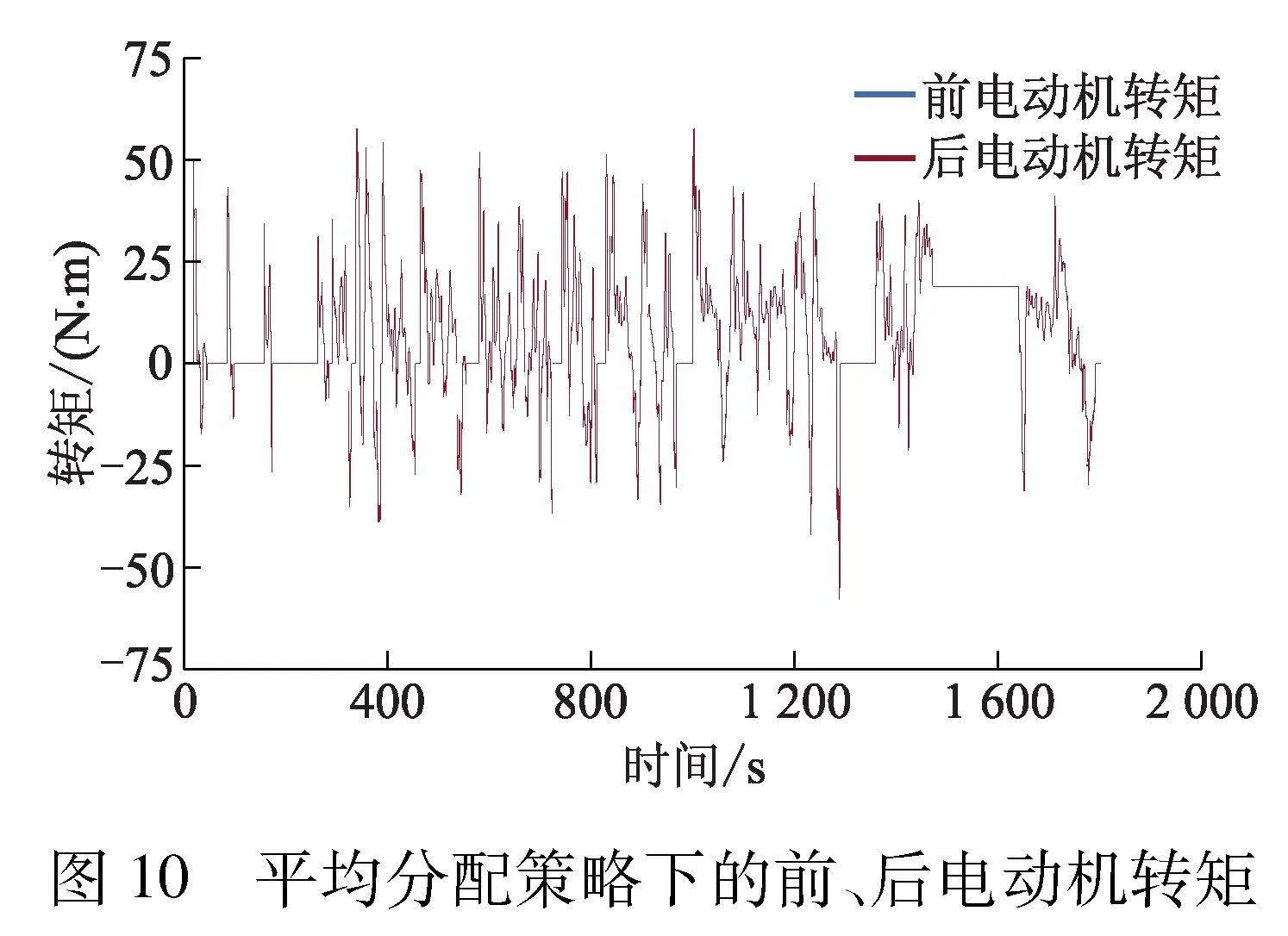
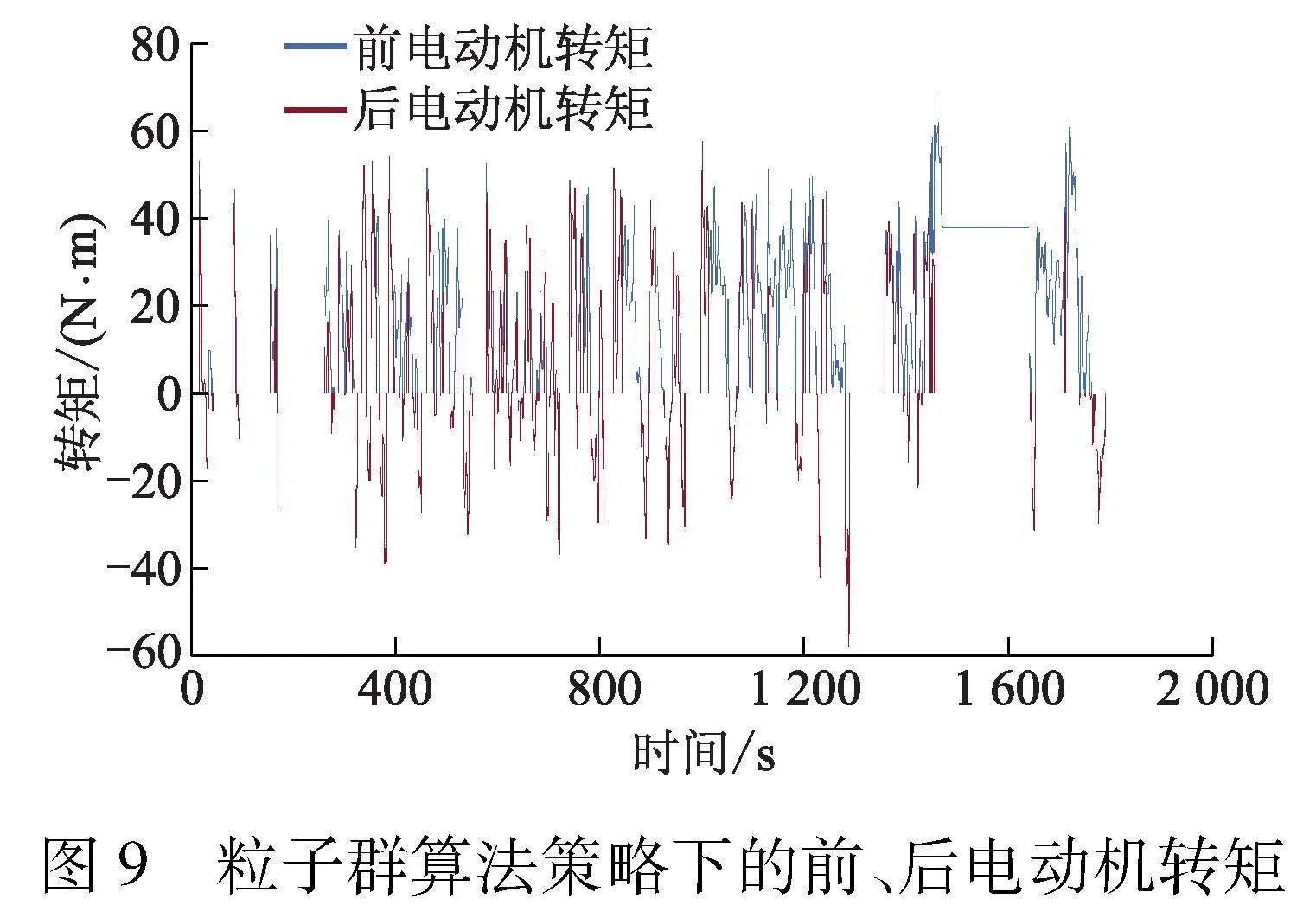
2种策略下的前、后电动机转矩如图9和图10所示.
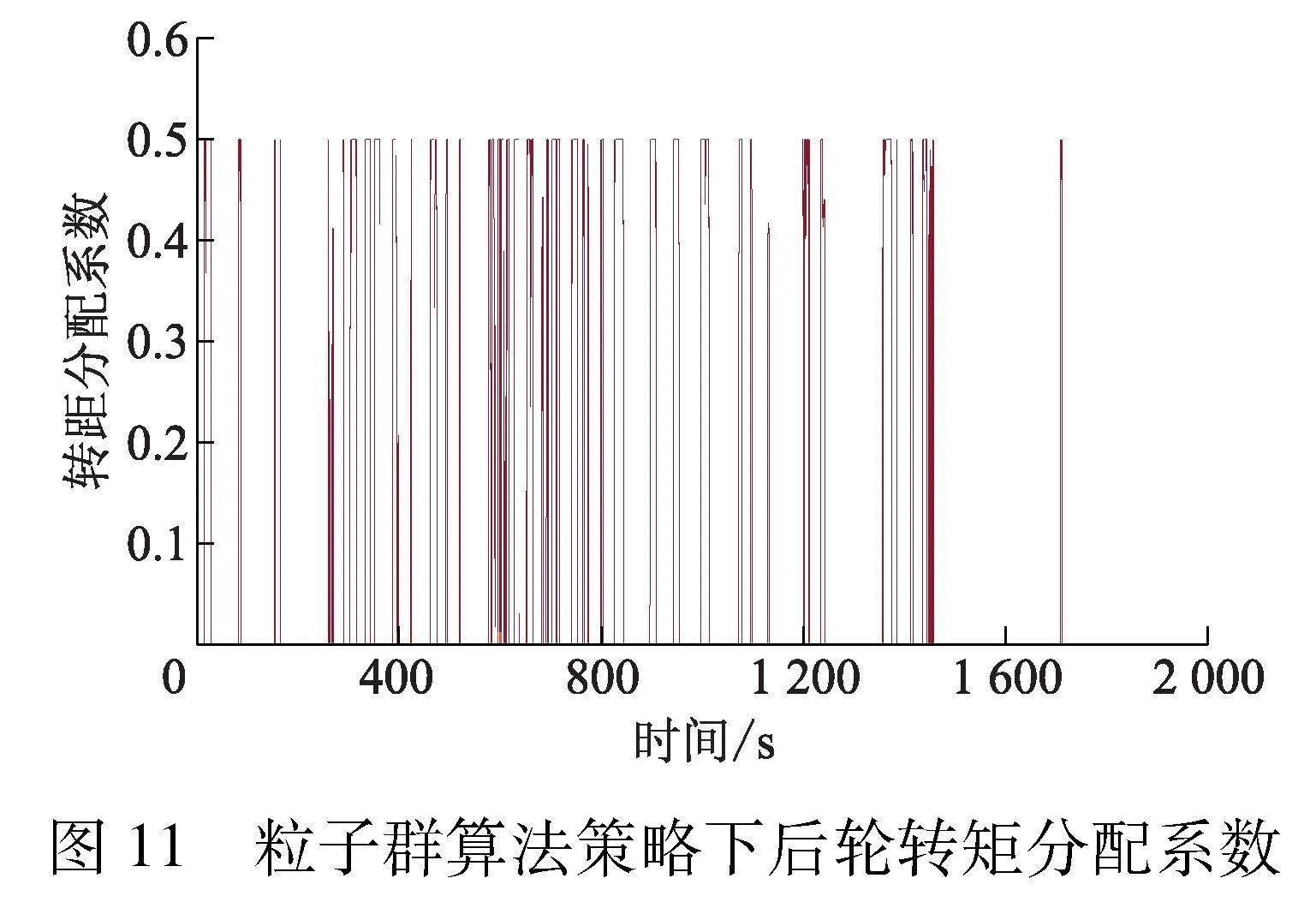
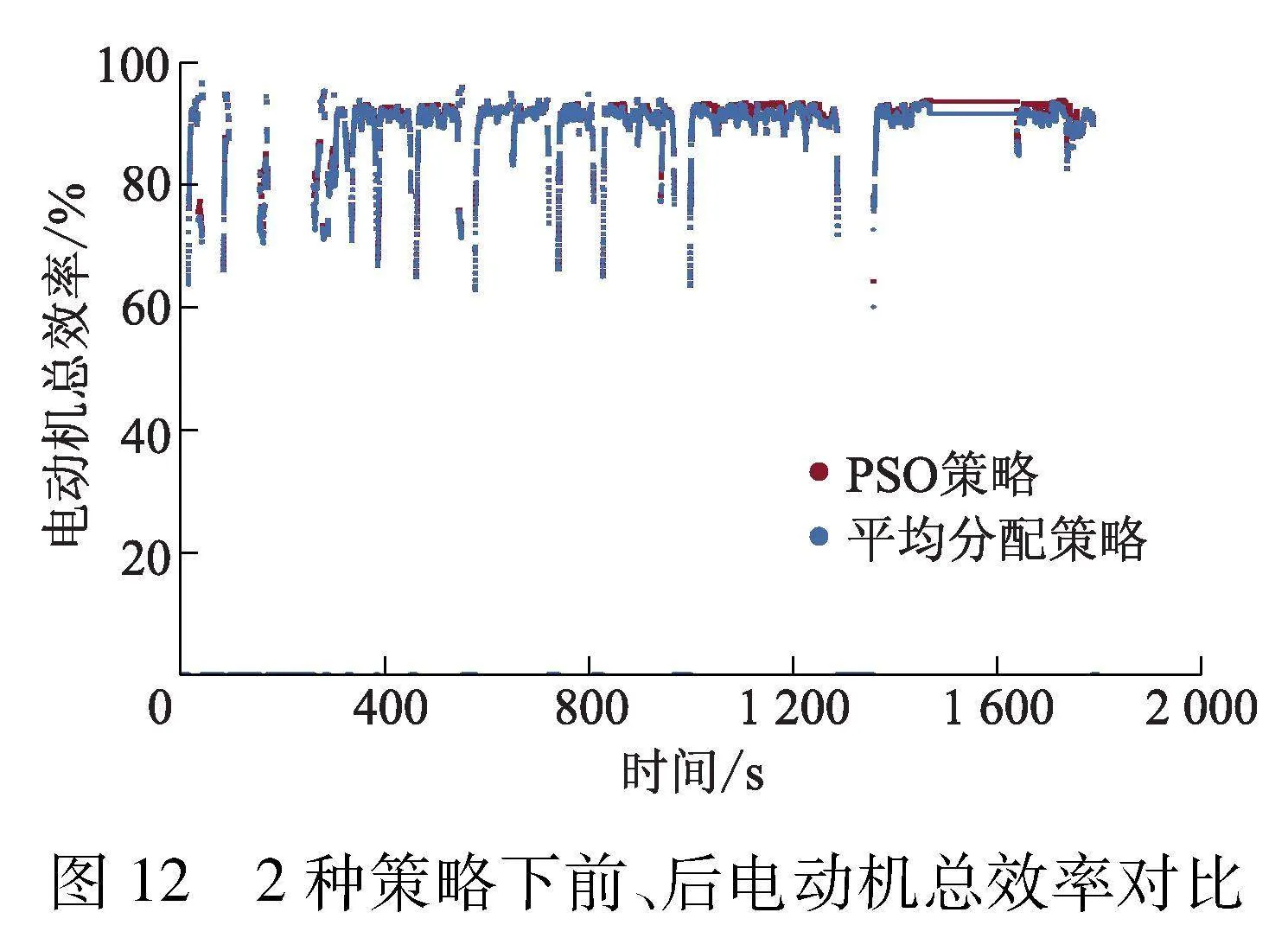
粒子群算法(PSO)策略下的后轮转矩分配系数如图11所示.前、后电动机总效率根据式(14)计算.2种策略的双电动机总效率对比结果如图12所示.假定前、后轴的制动能量完全由前、后轴上的电动机产生,能量消耗通过将CLTC-C中的电池功率进行积分获得.最终算出粒子群算法策略的百公里电耗为18.48 kW·h,平均分配策略则是18.75 kW·h.说明粒子群算法策略相比平均分配策略有更好的经济性.
由图12可知:循环运行中,粒子群算法的总效率大多数在90%以上,即使最低效率也不低于65%;总体上,粒子群算法策略下的电动机总效率高于平均分配策略,因而百公里电耗更小.因此,使用粒子群算法策略分配转矩时,2台电动机的总效率更高,证明了粒子群算法策略在双电动机转矩分配中具有一定的优越性.
3.2 粒子群算法策略仿真结论
1) 对于该双电动机动力传动系统,与平均分配策略相比,在CLTC-C中提出的粒子群算法转矩分配策略可以使前、后电动机总效率更高,百公里电耗更小.
2) 由图9和图11可知,拥有2个相同电动机的双电动机构型在低转矩时更多采用单电动机输出功率.相应地,高转矩时更多采用双电动机输出功率,然后根据粒子群算法得出的后轮转矩分配系数去适当分配转矩,以达到更高效率.由图11可知,当启用双电动机时转矩分配系数大多数情况为0.5,但也有不少时间段转矩分配系数不是0.5,总体在0.4附近徘徊,这为后续采用模糊控制策略进行实时转矩分配提供了可能.
4 模糊控制策略
根据粒子群算法策略的转矩分配结果,结合相关工程经验,作为模糊控制规则库的制定依据,从而在不同工况下,较快实现实时分配转矩.该方法可以适用于实车,给实车的控制策略提供了一种方法.
4.1 参数实时调节模糊控制器
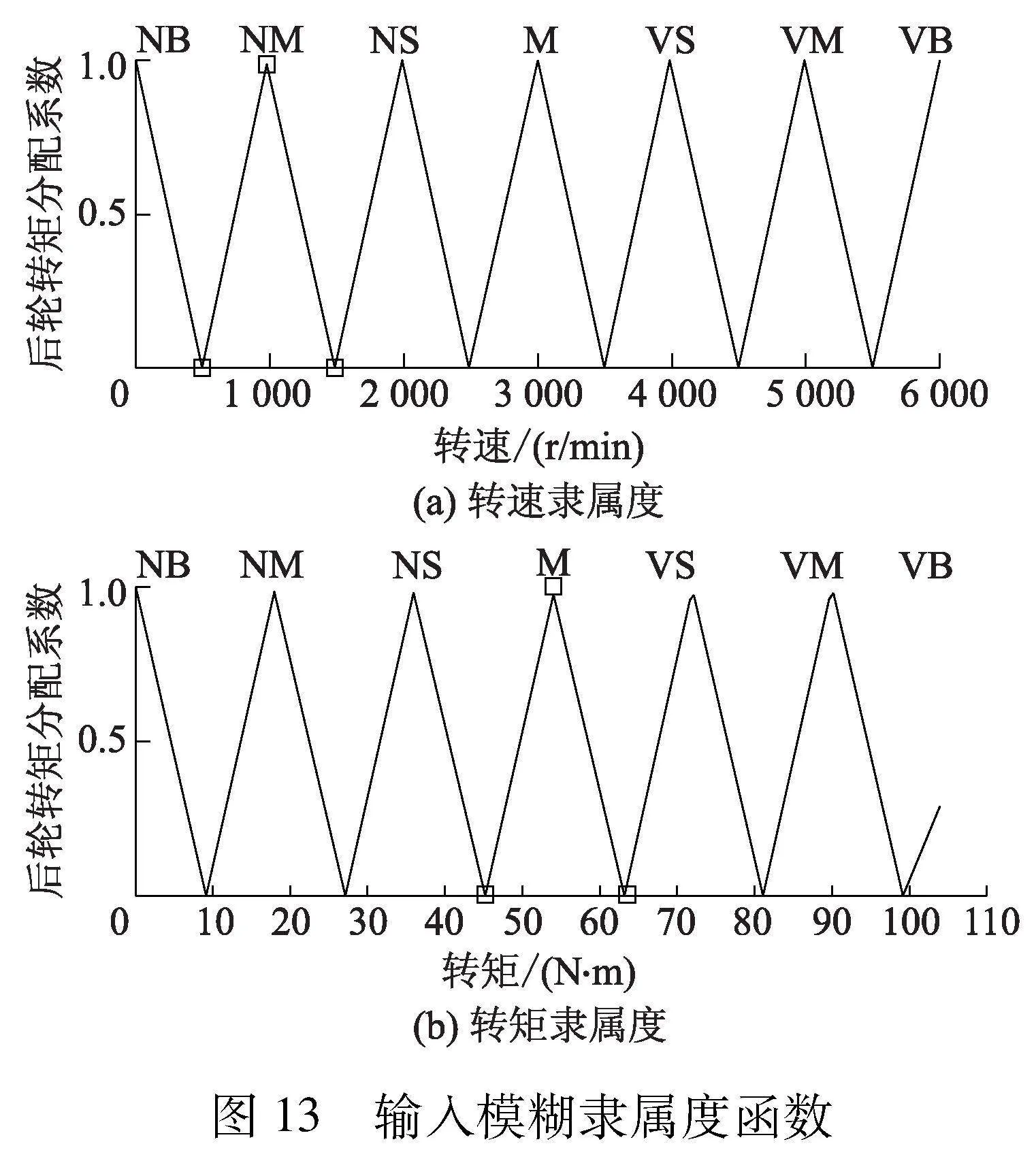
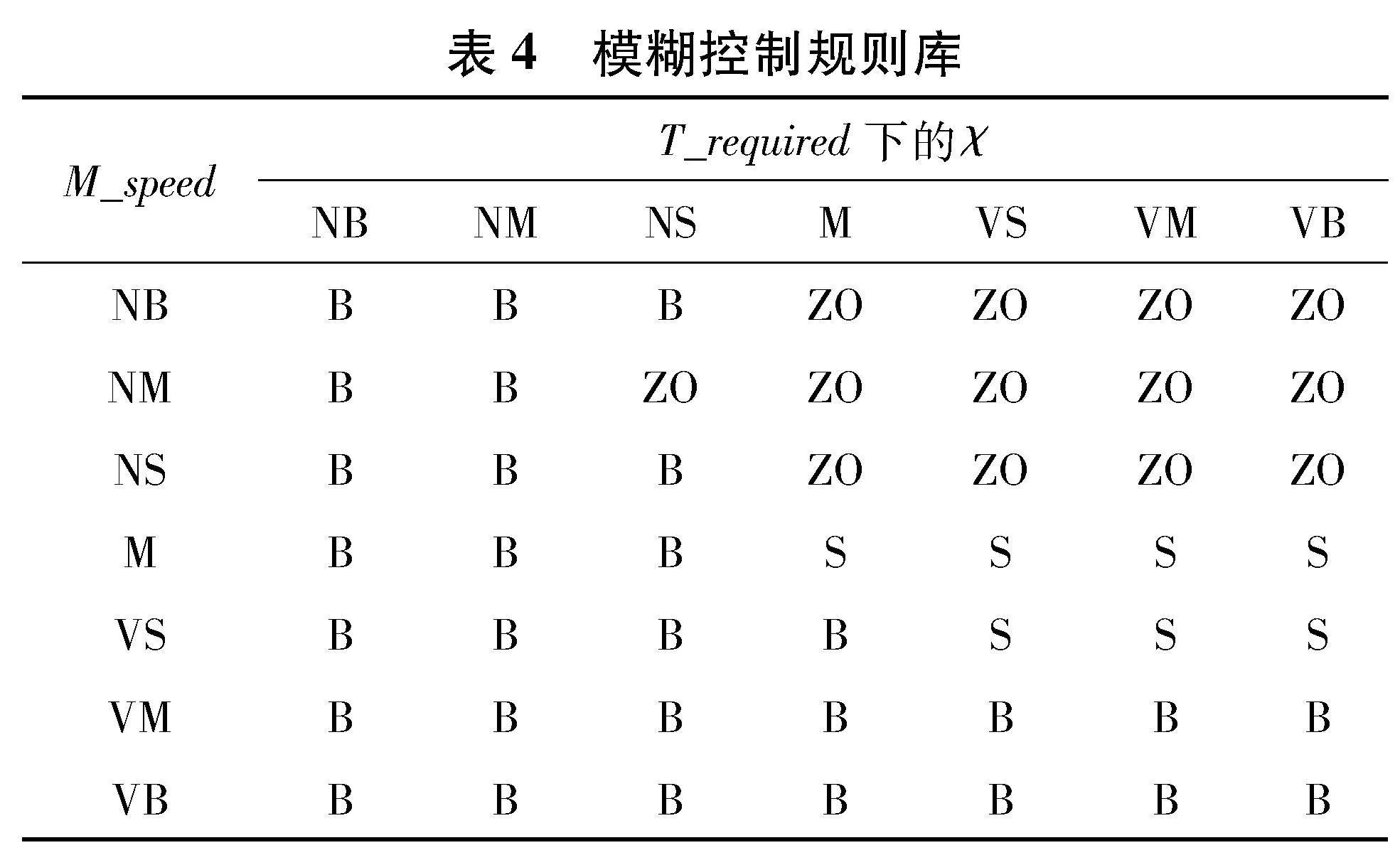
由输入(转速和转矩)、输出(后轮转矩分配系数)、模糊控制规则库、隶属度函数及模糊推理机制共同构成模糊控制系统[12].根据电动汽车整车能量流向,将电动机转速M_speed和电动机需求转矩T_required作为模糊系统输入,转矩分配系数χ的变化量Δχ作为系统输出,其中Δχ=0.5-χ,并采用以三角形类型为主的隶属度函数.根据粒子群算法的计算结果,2个输入隶属度函数(转速和转矩)都划分为7个模糊子集,其中0≤M_speed≤6 000,0≤T_required≤116,其中定义电动机转速的7个变量离散论域为{0,1 000,2 000,3 000,4 000,5 000,6 000}.同样,电动机需求转矩的7个变量离散论域为{0,18,36,54,72,90,117}.它们对应的模糊集合均为{NB,NM,NS,M,VS,VM,VB},其中NB、NM、NS、M、VS、VM和VB分别表示负大、负中、负小、中、很小、很中和很大.根据粒子群算法提取的后轮转矩分配系数分布情况,将输出隶属度函数划分为3个常数模糊子集,其中后轮转矩分配系数的3个变量离散论域划分为{0.5,0.1,0},与其对应的模糊集合为{B,S,ZO}(B、S和ZO分别表示大、小和零),且为均匀分布,以提高模糊控制系统控制精度.
该模糊控制的2个输入模糊隶属度函数如图13所示.表4为模糊控制规则库.
4.2 模糊控制策略验证
模糊控制策略能够很好地反应粒子群算法的结果,笔者对此进行了分析验证.在CLTC-C驾驶循环下对模糊控制策略进行仿真,车速跟随情况如图14所示.曲线非常吻合,模糊控制策略能很好地进行车速跟随.
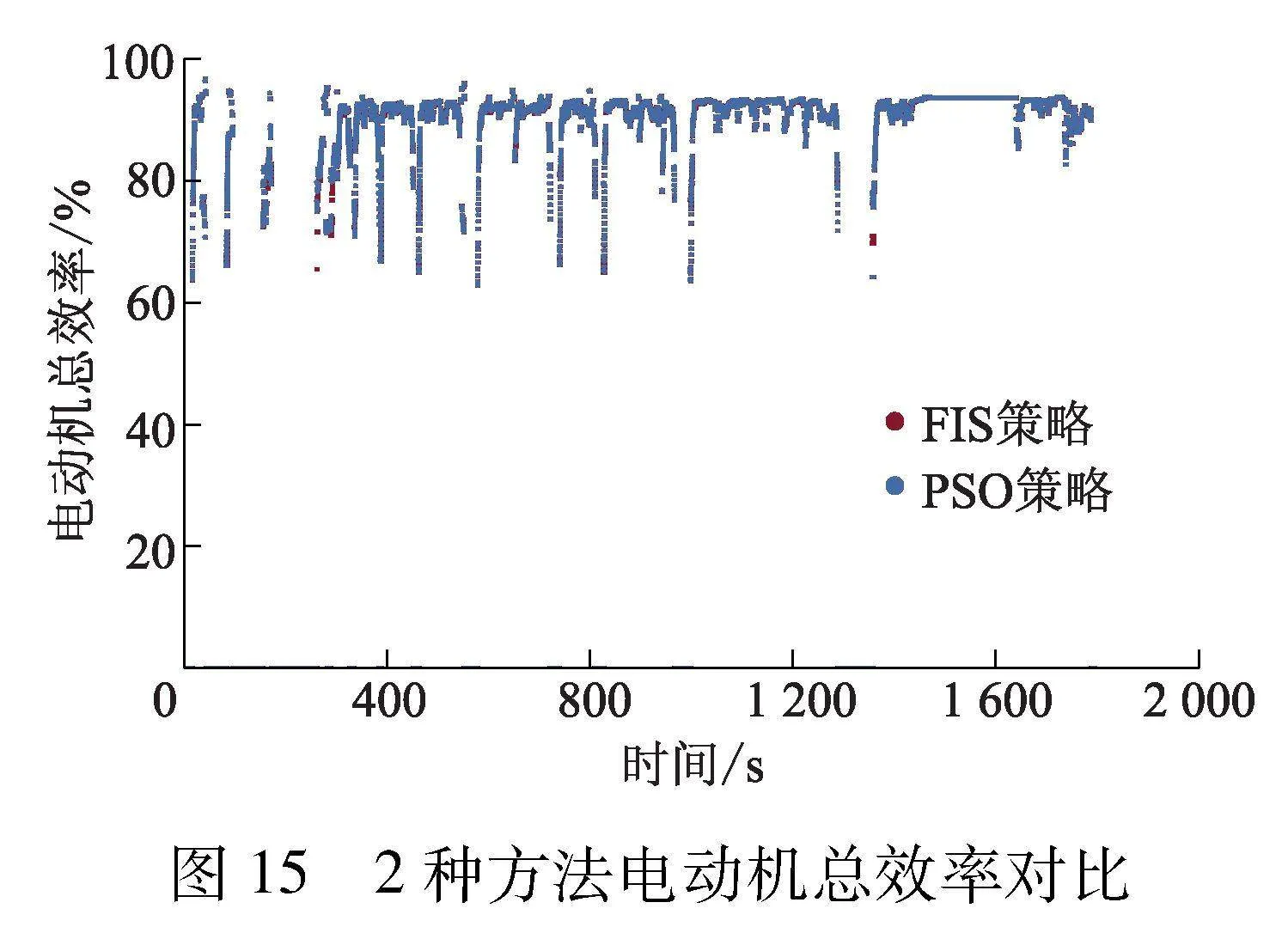
然后对其电动机总效率和百公里电耗进行对比分析.模糊控制(FIS)策略和粒子群算法策略得到的电动机总效率和百公里电耗对比分别见图15和表6.
由图15可知,模糊控制下的电动机总效率在大多数时间内不低于粒子群算法.和前文一样,将2种方法计算得到的百公里电耗进行对比,粒子群算法策略的百公里电耗为18.48 kW·h,模糊控制策略则是18.49 kW·h.2种方法的百公里电耗十分接近,说明参数可实时调整的模糊控制策略与粒子群算法策略一样,有很好的经济性.
5 验证与分析
为了验证所提出的参数可实时调整的模糊控制策略的优越性,在整车电耗、电动机总效率及电动机总损耗达到最优效果的条件下,设置转矩平均分配策略作为试验对照组.图16为模糊控制策略与平均分配策略电动机总效率对比.
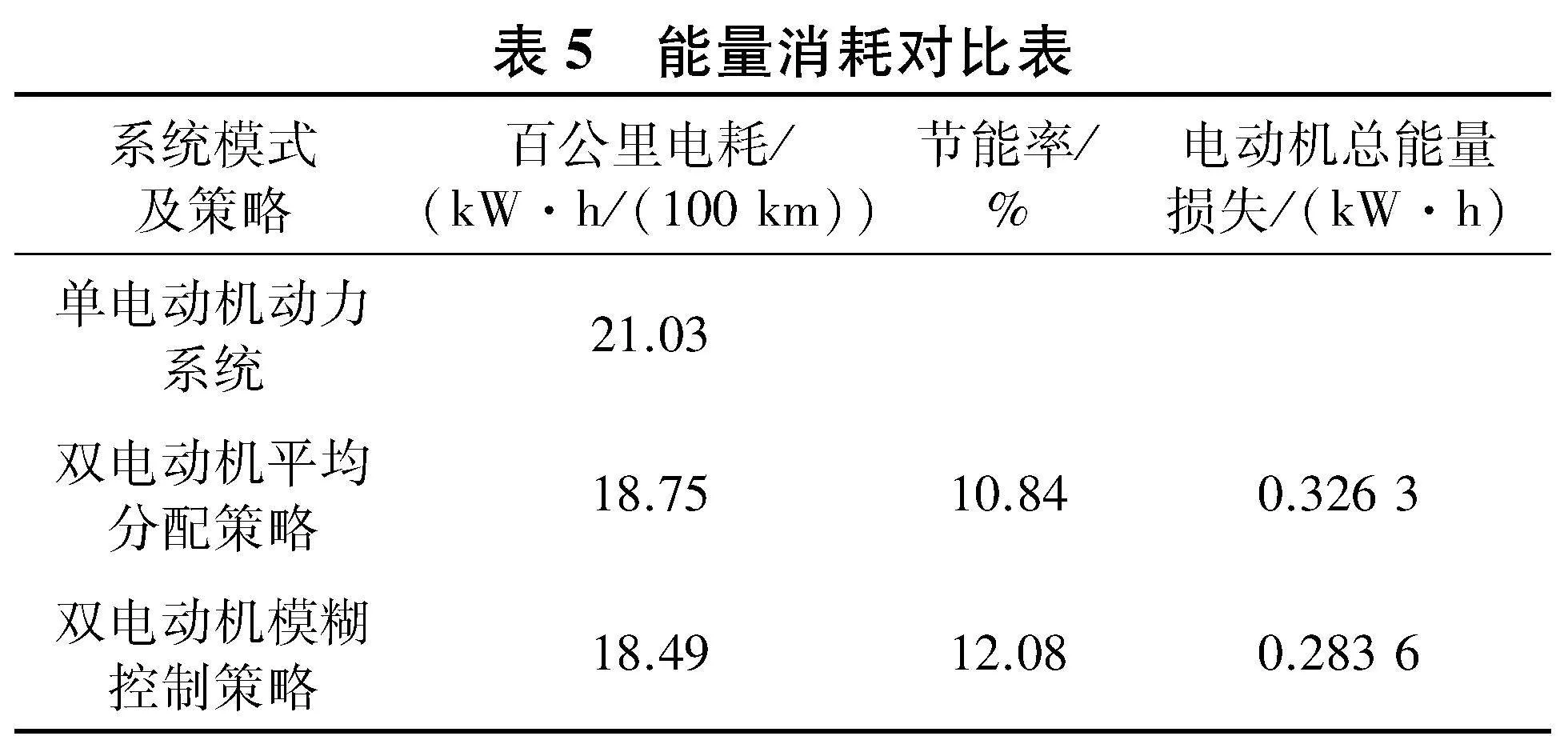
2种策略的电动机总功率损失对比如图17所示.由图17积分计算可得到模糊控制策略与平均分配策略的双电动机总能量损失.能量消耗对比如表5所示.根据表5数据,与平均分配策略相比,在CLTC-C中模糊控制策略的电动机总能量损失降低了13.09%.
在CLTC-C中,与单电动机动力系统相比,采用模糊控制策略与平均分配策略的双电动机动力系统的节能率分别达到12.08%和10.84%.
6 结 论
1) 设计的参数实时调整模糊控制器可以使用2个输入(电动机转速和所需转矩)和模糊规则库得到后轮最佳转矩分配系数.与传统粒子群算法相比较,模糊控制算法具有更好的实车适用性,在实车控制器中可以实时获得最优转矩分配.
2) 对于双电动机动力系统,在CLTC-C驾驶循环工况下,模糊控制分配策略与广泛应用于双电动机动力系统的平均分配策略相比,电动机总能量损失降低了13.09%.
3) 在CLTC-C驾驶循环工况中,采用平均分配策略和模糊控制分配策略进行仿真,与单电动机动力系统相比,双电动机动力系统的能量消耗分别减少了10.84%和12.08%,说明双电动机动力系统在合理转矩分配策略下,能量效率比单电动机动力系统更高.
4) 由于条件所限,在转矩分配时仅将双电动机的能量消耗纳入了考虑范围,但电池同样对整车总效率有十分重要的影响.同时,也尚未将模糊控制分配策略在实车上进行验证.为此,今后将围绕这两点开展深入研究.
参考文献(References)
[1] 漆星,王群京,陈龙,等. 前后轴双电机电动汽车转矩分配优化策略[J]. 电机与控制学报, 2020,24(3):62-70,78.
QI X, WANG Q J, CHEN L, et al. Optimization strategies of torque distribution for front and rear dual motor driven electric vehicles[J]. Electric Machines and Control, 2020,24(3):62-70,78.(in Chinese)
[2] 宋振斌,李军伟,孙亮,等.双电机电动汽车驱动转矩分配策略研究[J].广西大学学报(自然科学版),2019,44(2):316-324.
SONG Z B, LI J W, SUN L, et al. Driving torque distribution strategy for dual-motor electric vehicles[J]. Journal of Guangxi University (Natural Science Edition), 2019,44(2):316-324.(in Chinese)
[3] 牛礼民,张泉泉,朱奋田,等. 基于全局优化算法的增程式电动汽车模糊控制策略 [J]. 重庆交通大学学报(自然科学版), 2022,41(2):137-145.
NIU L M, ZHANG Q Q, ZHU F T, et al. Fuzzy control strategy for extended range electric vehicle based on global optimization algorithm[J]. Journal of Chongqing Jiaotong University(Natural Science), 2022,41(2):137-145.(in Chinese)
[4] ZHAO M J, SHI J H, LIN C. Energy management stra-tegy design for dual-motor coaxial coupling propulsion"" electric city-buses[J]. Energy Procedia, 2018,152(1):568-573.
[5] WANG J N,GAO S L, WANG K, et al. Wheel torque distribution optimization of four-wheel independent-drive electric vehicle for energy efficient driving[J]. Control Engineering Practice, 2021,110:104779.
[6] 余志生.汽车理论[M].6版.北京:机械工业出版社,2019:7-8.
[7] ZHANG S, XIONG R, ZHANG C N. Pontryagin′s minimum principle-based power management of a dual-motor-driven electric bus[J]. Applied Energy, 2015,159(C):370-380.
[8] 吴迪瑞. 前后轴双电机驱动纯电动客车的动力匹配及控制策略研究[D]. 武汉:武汉理工大学, 2020.
[9] CAO K, HU M, WANG D, et al. All-wheel-drive torque distribution strategy for electric vehicle optimal efficiency considering tire slip[J]. IEEE Access, 2021,9:25245-25257.
[10] 王琳,李军伟,朱青松,等.基于粒子群算法的电动客车双电机转矩分配策略[J].中国科技论文,2021,16(8):883-889.
WANG L, LI J W, ZHU Q S, et al. Torque distribution strategy of double motors in electric bus based on particle swarm oprimization[J]. China Sciencepaper, 2021,16(8):883-889.(in Chinese)
[11] KIM H W, AMARNATHVARMA A, KIM E, et al. A novel torque matching strategy for dual motor-based all-wheel-driving electric vehicles[J].Energies 2022,15(8):2717.
[12] CHAE W C, BUM K K, KIM J S, et al. Optimized design to improve the efficiency of driving motors for electric vehicles and reduce costs[C]∥Proceedings of the KSAE 2016 Annual Spring Conference. Jeju, Korea:[s. n.],2016:19-21.
猜你喜欢
软件导刊(2017年1期)2017-03-06 21:00:02
电子技术与软件工程(2017年1期)2017-03-06 20:38:07
电脑知识与技术(2016年30期)2017-03-06 20:13:33
现代电子技术(2017年3期)2017-03-04 21:34:52
现代电子技术(2017年3期)2017-03-04 08:19:58
中小企业管理与科技·中旬刊(2016年11期)2017-02-17 17:21:18
南水北调与水利科技(2016年5期)2016-12-27 14:57:39
预测(2016年5期)2016-12-26 10:04:59
电脑知识与技术(2016年12期)2016-06-14 19:27:24
商(2016年5期)2016-03-28 18:10:26