
基于多传感器融合的泄漏源巡检定位系统设计
2025-01-10 00:00:00陈东熠谢旭泽温杰张敏康泽威
物联网技术 2025年1期





摘 要:针对现存气体泄漏检测仪效率低、无法定位泄漏源等问题,提出了基于STM32的双车联动周期巡检方案,同时利用多传感器融合的方法,成功实现了对泄漏源位置的精准定位。方案采用了模块化设计思想和电子积木的概念,综合了便携式、固定式和区域检测系统3种方案的优点。实验证明,该周期巡检方案和泄漏源定位技术切实可行,不仅定位精度高、通信响应及时,还具备出色的可维护性和可升级性,并且系统各个模块具有可替换性,使得其拥有更广泛的实用性和普及性。
关键词:气体泄漏;STM32;双车联动;周期巡检;多传感器融合;泄漏源定位
中图分类号:TP23 文献标识码:A 文章编号:2095-1302(2025)01-00-05
0 引 言
随着世界经济的迅速发展,工业气体能源的使用率在逐年提高,但同时也存在着重大的安全隐患。在工业生产过程中,因报警系统响应滞后、工作人员操作失误等均会造成气体体积分数超过预警值或泄漏源发现不及时而引发事故,该类事故会对人身安全、社会经济以及生态环境造成不可挽回的重大损失。如2022年6月,约旦亚喀巴港口发生的有毒气体泄漏事故造成了14人死亡,256人受伤[1];2023年1月,辽宁省盘锦浩业化工有限公司发生的气体泄漏事故造成13人死亡,35人受伤。传统的气体泄漏检测仪存在着诸多局限性,如便携式气体泄漏检测仪精度低、依赖人工且检测效率低;固定式设备虽能提供较为稳定精准的数据,但受固定位置和检测范围的限制,难以应对快速变化的泄漏情况;区域监测系统虽在覆盖范围上具有优势,但其复杂性和高成本问题也不可忽视。另外,以上几种方式均无定位泄漏源的功能,在发生气体泄漏时需要现场工人逐区核查定位泄漏源。
为此,文中提出了基于STM32的双车联动周期巡检方案,同时结合了多传感器融合的泄漏源定位技术。该方案不仅具备泄漏源定位功能,还拥有巡检自动化、覆盖范围广、响应速度快、定位精度高等诸多优势,能较为全面地弥补现有仪器的缺陷,为工业生产提供更安全可靠的检测方式。
1 总体设计
1.1 系统框架设计
本系统主要由上位机、基站、小车A和小车B这4部分组成。在第一周期内,小车A负责巡检,并将气体体积分数数据通过蓝牙模块持续发送给上位机,由上位机对数据和基站接收到的小车A的坐标点进行处理。根据预先设定好的标准体积分数,提取出异常体积分数的值及其对应的坐标点,进行路径规划,并将路径和疑似泄漏点的坐标点发送给小车B。小车B通过规划好的路径到达疑似泄漏点进行气体体积分数检测和泄漏判断,若气体体积分数超标则会进行泄漏源定位,若未超标则继续检测下一疑似泄漏点,直至完成本周期内所有疑似泄漏点的检测。同时在小车B运行的整个流程中,小车B的坐标值将会被实时发送给上位机。在往后的周期里,上位机将根据小车A实时传输的气体体积分数值和坐标点,对小车B的运行路径进行动态规划和调整,双车联动重复循环检测、判断与定位。
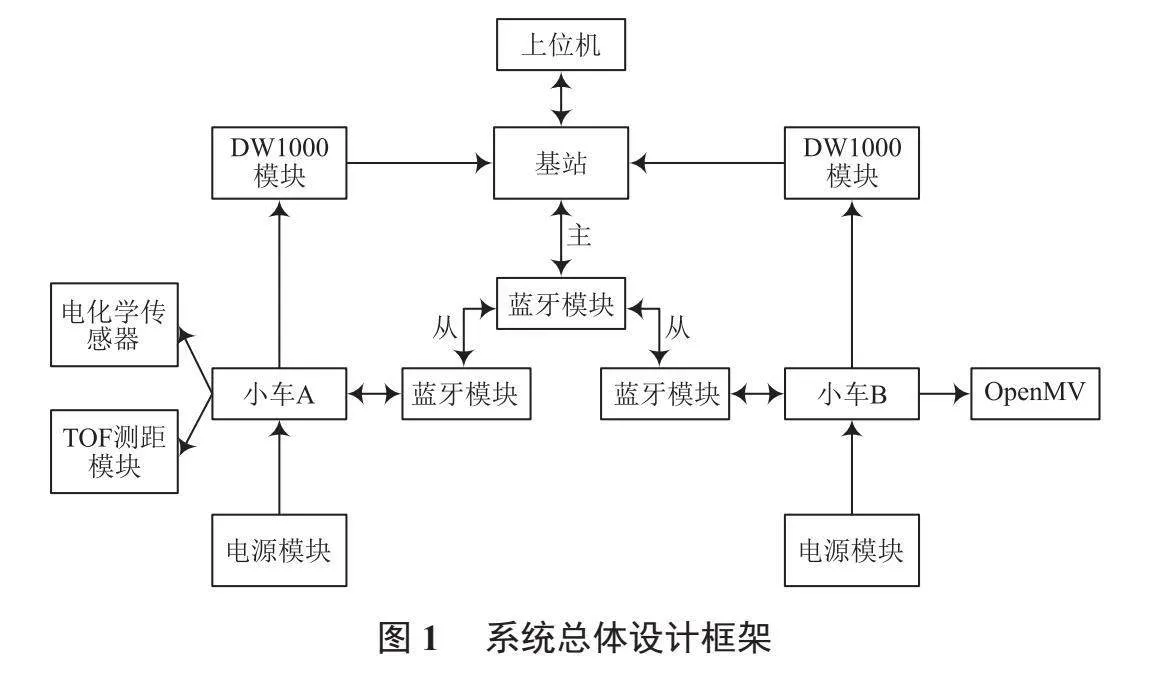
设计中,为了提高设备的性价比,采用模块化设计的方案,通过应用多传感器且引入电子积木概念完成系统的搭建[2]。硬件模块的选择上优先考虑气体体积分数检测和泄漏源定位功能。在气体体积分数检测方面,考虑到电化学式气体传感器检测范围大但精度较低,而热成像检测范围小但精度和可视化程度高,故设计中选择让小车A搭载电化学式气体传感器、小车B搭载OpenMV的方式来完成工厂的巡检。同时OpenMV和TOF测距模块还具备避障能力,使巡检效率更高。在泄漏源定位方面,采用UWB空间定位模块、OpenMV等多传感器融合运用的方式来完成泄漏源的定位,达到快速精准的定位效果。该系统的总体设计框架如图1所示。
图1 系统总体设计框架
1.2 系统流程设计
1.2.1 系统事故分析方法
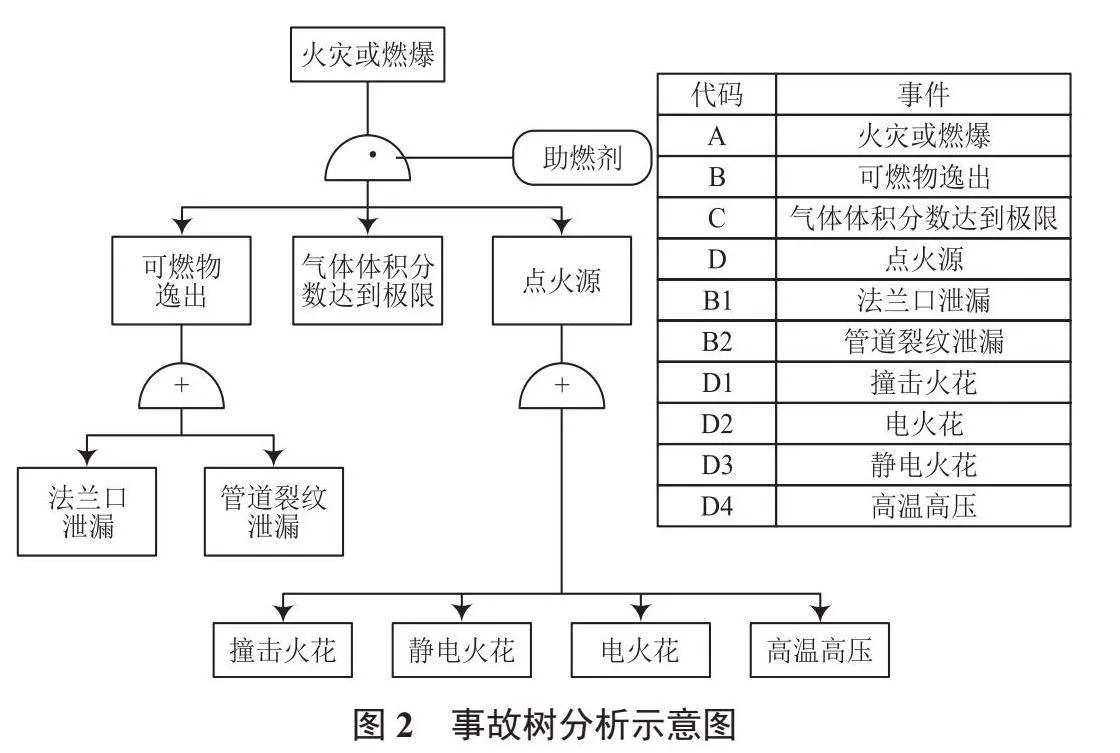
设计中采用事故树分析法分析工厂气体泄漏原因,事故树分析法是一种演绎推理的方法,简称FTA。该方法把系统可能发生的某种事故与致使事故发生的各种因素之间的逻辑关系用树形图的形式表示;然后对事故树进行定性分析与定量计算,找出事故发生的主要影响因素,为制定相应的安全措施提供指导[3]。该系统的事故树分析示意图如图2所示,图中列举了气体工厂事故的常见原因。
图2 事故树分析示意图
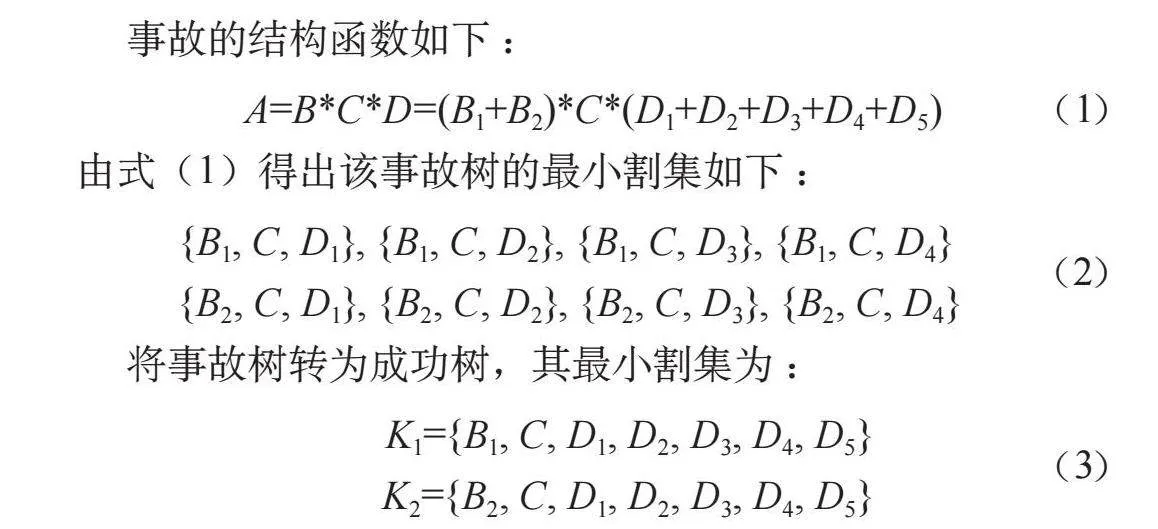
事故的结构函数如下:
A=B*C*D=(B1+B2)*C*(D1+D2+D3+D4+D5)" " " " " "(1)
由式(1)得出该事故树的最小割集如下:
{B1, C, D1}, {B1, C, D2}, {B1, C, D3}, {B1, C, D4}" " " " " (2)
{B2, C, D1}, {B2, C, D2}, {B2, C, D3}, {B2, C, D4}
将事故树转为成功树,其最小割集为:
K1={B1, C, D1, D2, D3, D4, D5}" " " " " " " " " (3)
K2={B2, C, D1, D2, D3, D4, D5}
由于点火源的成因复杂、助燃剂的成分复杂且难以检测,故消除火灾或燃爆隐患的最优方法是在可燃物逸出到达浓度极限前发现泄漏点。
1.2.2 系统运作流程搭建与分析
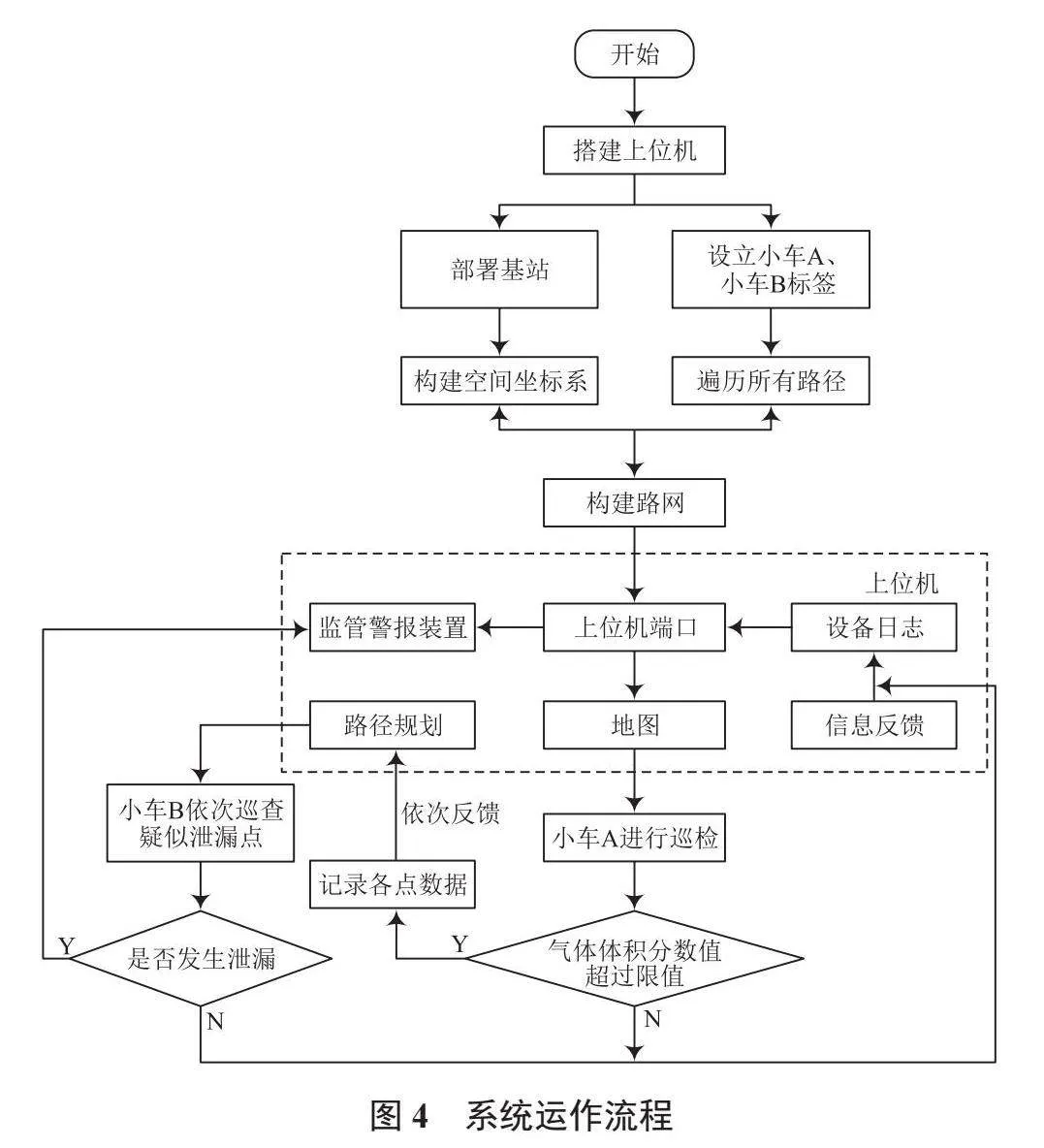
根据设计方案,系统的工作流程如图3所示,小车A负责一级巡检和数据反馈,小车B负责二级巡检和泄漏源定位,上位机负责路径规划和数据传输。其中,小车A、B上搭载标签,用于反馈车辆位置以及路径信息。
(1)系统准备阶段
系统准备阶段的流程搭建如图4所示,具体步骤如下:
(a)搭建上位机,部署基站,构建工厂内的空间坐标系。
(b)设立小车A、小车B标签。
(c)调用小车A,沿道路中线行驶,遍历所有需要检测的路径,建立基础地图。
(d)根据各路段的路宽、路面情况等环境因素设立各路段交通阻抗系数,再利用各点之间的距离加权计算路阻函数(以行驶时间表示),并以此数据计算遍历最短路径。
(e)将小车A遍历点的环境信息反馈到已经构建的工厂空间坐标系中,得到工厂的各路段路阻系数并生成地图数据。
(f)将地图数据储存到上位机,作为测量标注泄漏点的基础数据,构建路网并规划A车的巡检路径。
做好前期流程搭建、路径计算及基础数据采集后,再根据气体数据是否正常进行不同流程的处理。
(2)气体数据正常时的系统工作步骤
(a)小车A依据上位机的巡检路径对空间内气体体积分数数据进行巡检评估。
(b)小车A测得所有点位数据均在正常范围内,反馈巡检数据到上位机的设备运行日志中。
(3)气体数据异常时的系统工作步骤
(a)小车A依据上位机的巡检路径对空间内的气体体积分数数据进行持续检测。
(b)小车A测得气体体积分数数据异常时,记录气体体积分数的点位以及后期所有疑似泄漏点的位置信息,实时反馈所有点位的数据到上位机。
(c)上位机对反馈的巡检结果进行处理,找出疑似泄漏点,根据疑似泄漏点的位置规划出小车B的路径。
(d)小车B根据上位机提供的最短路径,快速前往疑似泄漏点,排查该点是否存在泄漏。
(e)如果发生泄漏,则反馈泄漏点位置信息到上位机的监测警报装置,发出警报;如果未发生泄漏,则小车B继续根据上位机提供的最短路径前往下一疑似泄漏点排查,同时反馈该疑似泄漏点的坐标值至上位机的设备运行日志中。
2 技术创新与方法改进
2.1 系统通信
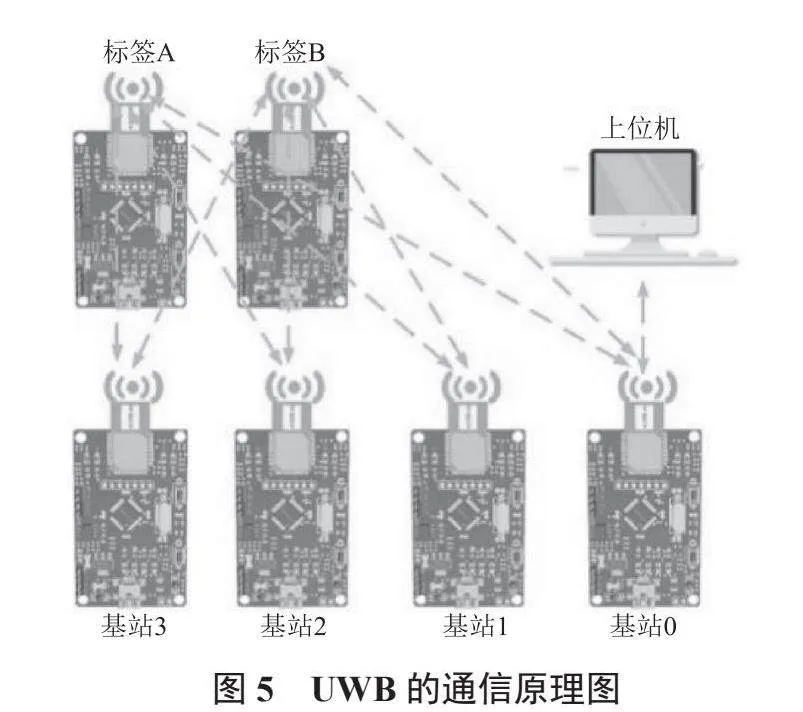
本系统主要通过蓝牙模块和DW1000模块进行通信,在三维空间坐标中采用基站0、1、2、3共4个基站进行定位。小车A和小车B对应配备标签A和标签B,用于通信反馈。其中,通过基站1、2、3收集到的数据用于三维空间坐标系的搭建;基站0通过DW1000模块接收标签A和标签B返回的三维空间坐标(x, y, z),并通过串行端口USART1将小车A的坐标值反馈给上位机。上位机规划路径后,将小车B
的最短路径和疑似泄漏点反馈给基站0,再由基站0通过USART3连接的蓝牙模块发送给小车B。UWB的通信原理图如图5所示。
在小车A巡检过程中,标签A经过超宽带TDOA算法[4],将得出的小车A的三维空间坐标点(x1, y1, z1)通过DW1000模块发送给基站0,同时通过USART1发送给小车A。若气体体积分数超过预先设定好的标准值,小车A将接收到的坐标点(x1, y1, z1)与气体体积分数数据通过USART3连接的蓝牙模块反馈给基站0,由基站0将数据反馈给上位机,进行小车B的路径规划。
在整个运行周期内,标签B经过超宽带TDOA算法,将得出的小车B的三维空间坐标(x2, y2, z2),通过DW1000模块发送给基站0,并同时由串行端口USART1发送给小车B。小车B通过USART3连接的蓝牙模块[5],接收由基站0发送的路径和疑似泄漏点坐标;接着根据接收到的路径,对疑似泄漏点逐个进行泄漏源检测。若小车B通过数据对比判断出气体发生泄漏,则进行泄漏源定位。当小车B定位到泄漏源的位置时,将进行坐标计算并通过蓝牙模块反馈给基站0,由其发送给上位机。其中,在小车B的整个运行过程中,标签B会实时将坐标值通过基站0发送给上位机。
系统巡检的过程中,小车A和小车B使用串口进行通信,并通过延时消抖来解决系统误差过大的问题。其中蓝牙使用一主多从的模式,上位机的蓝牙模块为主机,小车A和小车B为从机。整个周期巡检的过程中,上位机对获取到的小车A的坐标值和气体体积分数进行数据处理,同时进行路径规划,再将规划完成的路径以及疑似泄漏点的坐标发送给小车B,由小车B进行二级巡检和泄漏源定位。此方案极大地缩短了小车A和小车B的运算时间,提高了小车的响应能力,同时避免了通信延迟所导致的决策延迟,提高了数据传输的效率和准确性,同时降低了功耗。
2.2 小车定位精度的提高
本系统通过TOF测距模块与UWB模块的融合来提高小车的定位精度[6]。其中TDOA算法的原理是通过多基站接收同一个标签信号,并计算信号到达基站的时间差,结合连接上位机的通信基站0,在已知基站坐标的情况下算出距离差,最后再通过三角定位原理,将距离差和时间差通过三维多边测量定位,得出小车的三维空间坐标点(x, y, z)。在本系统中,基站通过DW1000模块获取车辆标签定位,运用TDOA算法获取自身与基站间的距离,并通过坐标运算来计算出精确的位置信息,具体做法为:首先进行UWB定位系统框架的搭建[7],其中包括UWB的基站和标签,基站的位置是已知的,标签则是需要定位的目标;接着在小车中添加TOF测距模块,用于测量UWB信号的传播时间,从而计算标签到基站的距离;然后根据TOF测距模块测量的距离信息,结合UWB的多点定位算法,通过三角测量、TDOA算法实现三维空间定位;最后将TOF测距模块测量的距离信息与UWB系统的信息结合起来,通过循环迭代的算法,提高定位的精度。
循环迭代算法分为预测步骤和更新步骤。在预测步骤中,根据系统动态模型,使用先前的状态估计来预测下一时刻的状态估计,主要包括以下计算。
状态预测:
_=F· (4)
式中: _为预测的状态估计;F为状态转移矩阵。
协方差矩阵预测:
P_=F·P·FT+Q " " " " " " " (5)
式中:P_为预测的状态协方差矩阵;Q为过程噪声的协方差矩阵。
在更新步骤中,根据测量值和测量模型,使用预测的状态估计来更新系统状态的估计,这包括以下计算。
卡尔曼增益[8]计算:
K=P_·HT·(H·P_·HT·R)-1" (6)
式中:K为卡尔曼增益;H为测量模型矩阵;R为测量噪声的协方差矩阵。
残差计算:
y=z-H· _" (7)
式中:y为残差;z为测量值。
状态更新:
= _+ K ·y (8)
状态预测:
P=(I-K·H)·P_ " " " " " " " (9)
式中:I为单位矩阵。
重复执行预测步骤和更新步骤,以不断更新系统状态的估计。在每个时间步骤中,根据新的测量值和系统模型来迭代更新状态估计。在循环迭代算法运算过程中应确保UWB系统中各个基站和标签的时钟是同步的,以减小时间测量误差。
在此方案中加入TOF测距模块进行实时测量,提高了UWB定位的速度和精度,使得其可在复杂的环境中得到可靠的定位结果。
2.3 泄漏源的定位
本系统通过OpenMV热成像模块[9]和泄漏源定位公式进行泄漏源的定位,当小车B根据规划好的路径到达指定疑似泄漏点时,缓慢移动承载着OpenMV的舵机云台进行检测,OpenMV热成像模块MLX90640检测到泄漏源时STM32记录舵机的脉冲数[10]并利用以下公式进行计算:
θ =舵机记录的脉冲数量× " "(10)
由式(10)可得出此时OpenMV转动的角度,同时将OpenMV通过多次测距所计算出的平均值反馈给STM32芯片,并通过上位机搭建的空间坐标系进行数据的标记[11]。
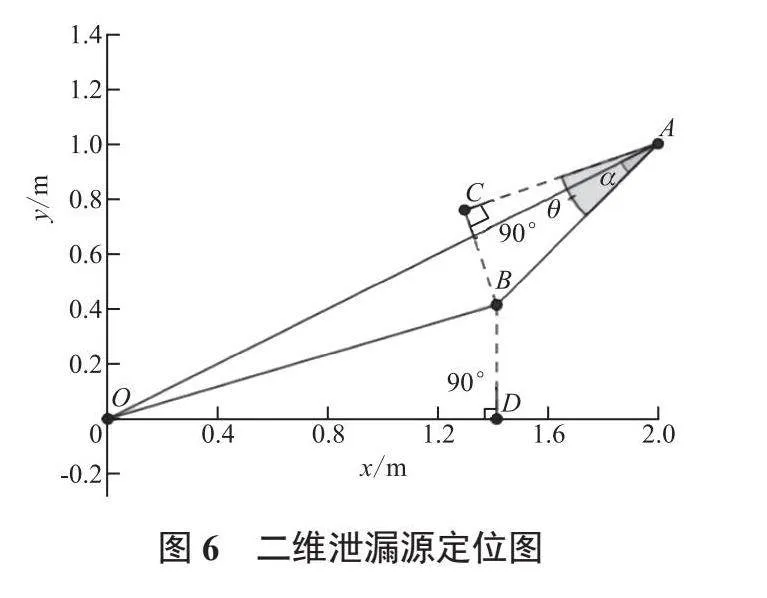
如图6所示,坐标系为上位机自主搭建,其中O点为搭建的坐标系原点,A点为小车坐标,B点为泄漏源二维平面坐标,AC方向为车头朝向,AB为小车A与泄漏源在二维平面上的直线距离。
" " " " " " " " (11)
式中:A(x1, y1)为小车坐标;B(x2, y2)为泄漏源二维平面坐标。
由式(11)可得B点的坐标为(x2, y1k(x1-x2))。接着可得泄漏源二维平面的计算公式为:
" (12)
式中:M=x1(x1+2ky1-k2x1)-AB2,x1、x2分别大于0且 x2 1 + y2 1 gt;
AB2。
由式(12)可得出二维平面上泄漏源的坐标B(x2, y2)。设小车摄像头与具体泄漏源位置坐标的垂直距离为BE,即泄漏源三维空间上的具体泄漏位置坐标点为E(x2, y2, BE),则小车摄像头与具体泄漏源位置坐标的直线距离为AE。参考角度计算公式(10)可以得出AB与AE的夹角γ的具体值,且小车A与泄漏源在二维平面上的直线距离AB已知,根据式(13)可得出BE的值,从而得到三维空间坐标(x2, y2, BE),最后将泄漏点反馈给上位机,并由上位机发出警报。
tanγ= " " " " " " " " " " (13)
3 数据采集训练及泄漏源定位验证
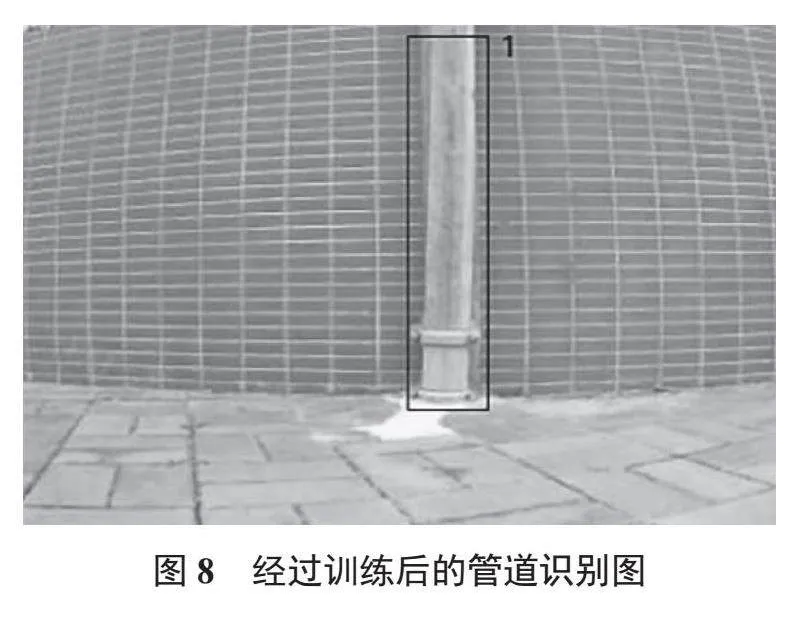
为了进一步验证本文所提出的方法的实际效果,进行了模拟实验分析。通过大规模的管道采样并进行训练,使系统具备识别管道的能力。将收集到的管道图片放入Edgeimpulse中进行标注,在标注完成后通过设定卷积神经网络模型进行多周期的模型训练,如图7所示。通过训练,目前管道识别率已达到98.9%,系统能快速精准地识别出管道,经过训练后的管道识别图如图8所示。
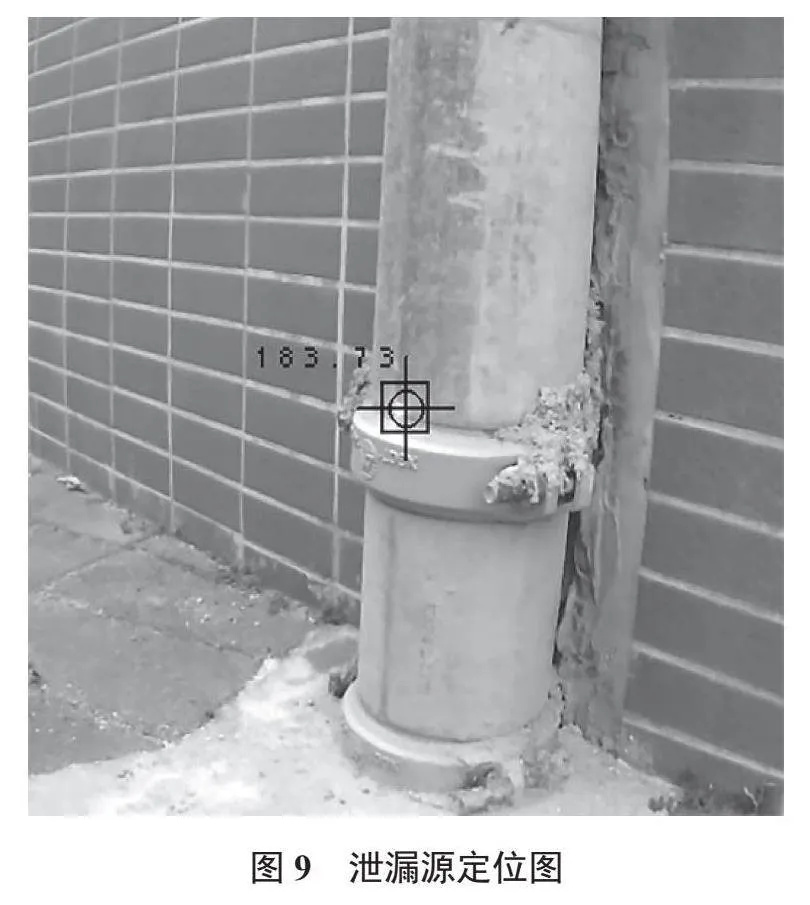
由于本文系统主要针对易燃易爆和有毒气体,而该类气体在实际操作中会给模拟实验带来不便。为了确保模拟实验正常进行,利用一条放置于室外并且存在泄漏点的铁质管道,进行气体泄漏模拟实验。在此模拟实验中,如图6所示,空间原点坐标为O(0, 0),小车空间坐标为A(2, 1),小车与泄漏源的距离AB=2,θ=45°,γ=60°。根据式(12)可以得出泄漏源坐标B(3, 2, 2" )。图9为泄漏源定位图,可见目前本系统已具备泄漏源定位的能力。小车在一个周期内检测出了所有疑似泄漏点,并在检测完毕后将泄漏点状态反馈到上位机,上位机发出警报,随后进入下一周期的泄漏点检测。
经过上述模拟实验,证实了基于多传感器融合的泄漏源巡检定位系统对管道识别的可行性及泄漏源定位的准确性。
4 结 语
本文针对现有气体泄漏检测仪无法自主移动、依赖人工导致检测效率低下等问题,通过采用基于STM32的双车联动周期巡检方案以及基于多传感器融合的泄漏源定位技术来弥补现有气体泄漏检测仪的缺陷。周期巡检能确保检测系统的稳定性且后期能通过长期趋势分析来预测泄漏位置。除此之外,系统具有的泄漏源定位功能也能提高工作人员的处理速度,减少人员伤亡、环境污染和经济损失,通过多传感器的融合技术提高了定位精度,从而减少了事故的发生率。同时,本文提出的系统成本相对于传统气体泄漏检测仪也较有优势,国内目前缺乏对巡检检测小车的系统性研发,故具备较大的应用价值,该研发将会成为国外进口的高成本产品的高性价比替代品。
注:本文通讯作者为张敏。
参考文献
[1] 佚名.约旦一港口发生有毒气体泄漏已致14人死亡265人受伤[J].化工安全与环境,2022,35(26):24.
[2] 蔡书鉴,张敏,陈志聪,等.基于STM32单片机的水泊清洁机器人设计[J].自动化与仪表,2022,37(8):54-57.
[3] 胡乃飞.基于最小割集的L-CNG站安全生产过程火灾和爆炸分析[J].中国品牌与防伪,2023(7):62-65.
[4] 苏素燕,陈金旺,王林芳,等.室内外定位技术综述[J].智能计算机与应用,2023,13(10):179-183.
[5] 丛一凡,王成龙,胡旭,等.基于STM32单片机的健康手环[J].物联网技术,2021,11(6):106-108.
[6] 王飞.基于UWB TOF测距的矿井精确定位方法研究[J].自动化仪表,2022,43(8):62-66.
[7] 吴尧帅.基于UWB的室内三维跟踪系统设计[J].单片机与嵌入式系统应用,2023,23(11):71-74.
[8] 李凯俊,赵晨,赵春晖.基于自适应扩展卡尔曼滤波器的UWB-PDOA算法[J].黑龙江大学工程学报(中英俄文),2023,14(2):33-39.
[9] 张紫东,马春燕,陈燕,等.基于人脸跟踪云台的红外热成像系统[J].电子器件,2022,45(3):665-671.
[10]林千琪,汪筠博,战秋成,等.四自由度机械臂运动学算法与舵机减速设计[J].机械工程师,2023(11):64-66.
[11]孙长城,邓玲,牛牧原,等.基于STM32的智能空调送风装置设计[J].物联网技术,2022,12(10):92-95.
