
混合模糊图像中运动模糊参数估计方法改进
2025-01-10 00:00:00刘子雄方振国
物联网技术 2025年1期








摘 要:针对混合模糊图像中频谱暗条纹特征难以提取的问题,提出了一种改进的PSF参数估计方法。通过对频谱梯度图像直方图进行均衡化处理,从而扩大图像动态范围,增加高灰度像素数目。由于条纹信息集中在高灰度像素附近,像素数目的增加使得条纹特征更加突出,便于图像二值化时分割条纹信息和干扰信息。实验结果表明,在同一模糊参数下,改进后的方法对模糊尺度估计的平均误差比改进前低3.7 px,提高了数据的准确性。
关键词:图像复原;混合模糊;运动模糊;Radon变换;点扩散函数;特征提取
中图分类号:TP391.41 文献标识码:A 文章编号:2095-1302(2025)01-00-03
0 引 言
混合模糊是由运动模糊和散焦模糊叠加构成的图像模糊,在拍摄移动物体时摄像头不易聚焦,导致拍出的图像容易出现混合模糊。在混合模糊图像的频谱图中,运动模糊特征较难提取,且其对图像复原质量的影响较大。运动模糊中的2个重要PSF参数,即模糊尺度L和模糊角度θ,是图像复原的关键所在。
对于单运动模糊的PSF参数估计问题,许多学者都做了相应的研究[1-12],但在混合模糊领域的研究较少。文献[13]提出了一种基于倒谱分析的混合模糊模型鉴别方法,有效地实现了模糊模型的估计。文献[14]提出了一种基于自相关的参数估计方法,解决了混叠现象造成的干扰问题,从而取得了较好的复原效果。文献[15]用Sobel算子对混合模糊图像的频谱二值图像进行了边缘检测,通过阈值检测标记出中心2条直线来估计模糊角度,并通过估算中心2个条纹的间距来计算模糊尺度。但在混合模糊图像中,随着运动模糊尺度的增加,中心条纹的间距会越来越小,用中心条纹间距计算出的结果与真实值也相差越来越大。
本文提出了一种改进的PSF参数估计方法,通过对频谱梯度图像直方图进行均衡化处理,突出条纹特征,使梯度图像二值化时保留更多的条纹信息,从而让PSF参数估计得更为准确。
1 频谱特性分析
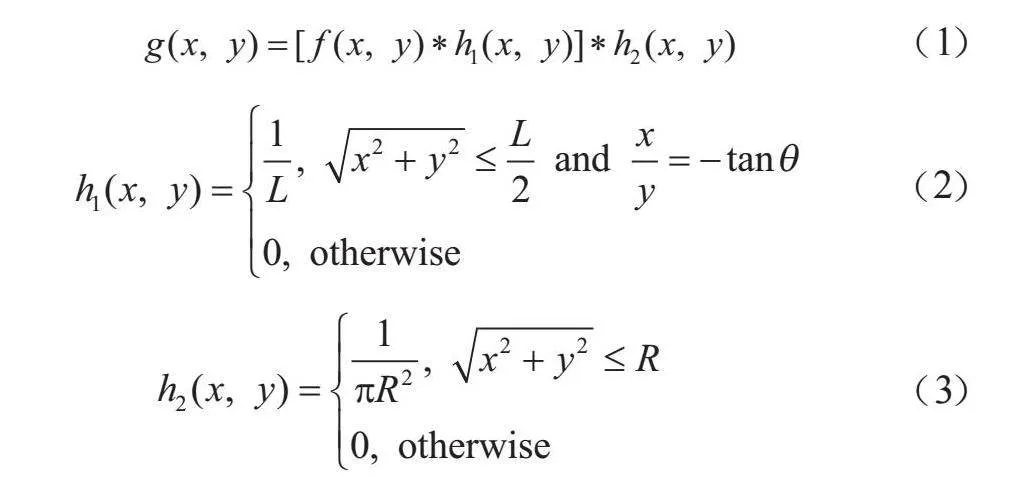
混合模糊图像主要是在运动模糊的基础上叠加了散焦模糊,其退化模型在时域上表示为:
" " (1)
(2)
(3)
式中:g(x, y)表示退化图像;f(x, y)表示原图;h1(x, y)表示运动模糊的PSF;h2(x, y)表示散焦模糊的PSF。
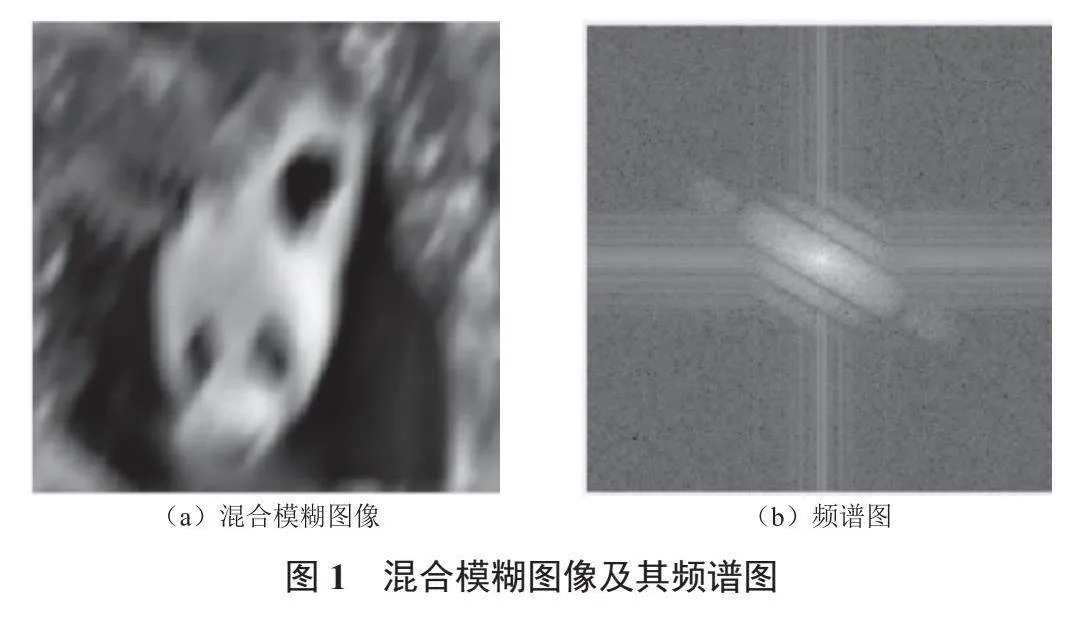
图1是256×256的Panda混合模糊图像及其频谱图,其模糊长度L=20、模糊角度θ=60°、散焦半径R=3。从频谱图中可以看到,暗条纹的方向与运动方向呈垂直关系,同侧暗条纹之间的距离是相等的。正常情况下频谱条纹的个数反映了运动模糊的长度,但在混合模糊图像的频谱中暗条纹数量明显减少,且十字亮线与中心亮环的干扰更为严重。
2 PSF参数估计步骤
由上述分析可知,混合模糊图像频谱图中存在更为严重的噪点、十字亮线和中心亮环的干扰,一般通过滤波或形态学变换等现有方法来消除这些干扰,但是这些方法存在有效信息的丢失和残留干扰等问题。因此本文提出了一种改进的PSF参数估计方法,步骤如下:
(1)对图像做傅里叶变换,并进行中值滤波。
(2)用Sobel算子提取边缘信息,得到频谱梯度图像。
(3)裁剪中心梯度图像,进行直方图均衡化。
(4)选取阈值T,将均衡化后的梯度图像二值化。
(5)对二值图像在0~180°范围内进行间隔1°的Radon变换,取变换结果的最大值估计模糊角度θ。
(6)将二值图像按估算出的角度旋转作垂直投影,得到相邻暗条纹的间距d,通过公式计算出模糊尺度L。
3 算法实现
3.1 频谱处理
对图1(b)进行5×5窗口的中值滤波,得到滤波后的频谱图如图2所示。滤波后的频谱图相较于滤波前筛除了部分噪点干扰。
3.2 获取频谱梯度图像
用Sobel算子对图2进行滤波,得到的梯度图像如图3所示。
从梯度图像中可以看出,Sobel算子对图像的噪声有一定的平滑作用,并且增强了边缘特征,使条纹信息显得粗而亮。
3.3 梯度图像均衡化
直方图均衡化是通过将灰度级r的累积分布函数作为变换函数,使图像的灰度级均匀分布,其函数如式(4)所示:
(4)
其离散形式如式(5)所示:
... (5)
式中: Sk为计算后得到的新灰度级;pr(rj)为第j级灰度rj的概率;N为图像的总像素个数;nj为第j级灰度rj对应的像素数;L为图像中的灰度级总数。
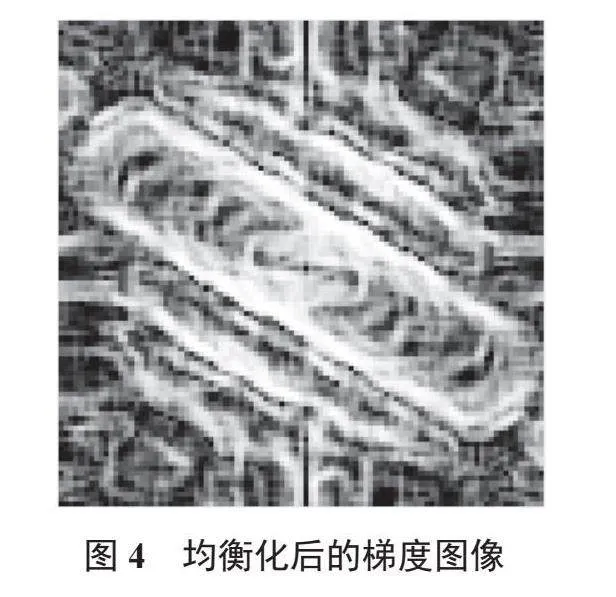
由于十字亮线的干扰对后续的参数估计存在较大影响,故只对其中心梯度图像进行均衡化,如图4所示。
对比均衡化前后的直方图(图5)可以看到,均衡化不仅扩大了图像的动态范围,还增加了高灰度像素数目。由于条纹信息集中在高灰度像素附近,高灰度像素的增加使得条纹特征更加突出,便于后续图像二值化时分割条纹信息和干扰信息。
3.4 图像二值化
选取高灰度级像素作为阈值,对均衡化后的梯度图像进行二值化处理,如图6所示,二值化图像中的线条即为原频谱图中的条纹特征。
3.5 模糊角度估计
对二值化图像在0~180°范围内进行间隔1°的Radon变换,取变换结果的最大值绘制曲线如图7所示,图中像素值最大处即为模糊角度。
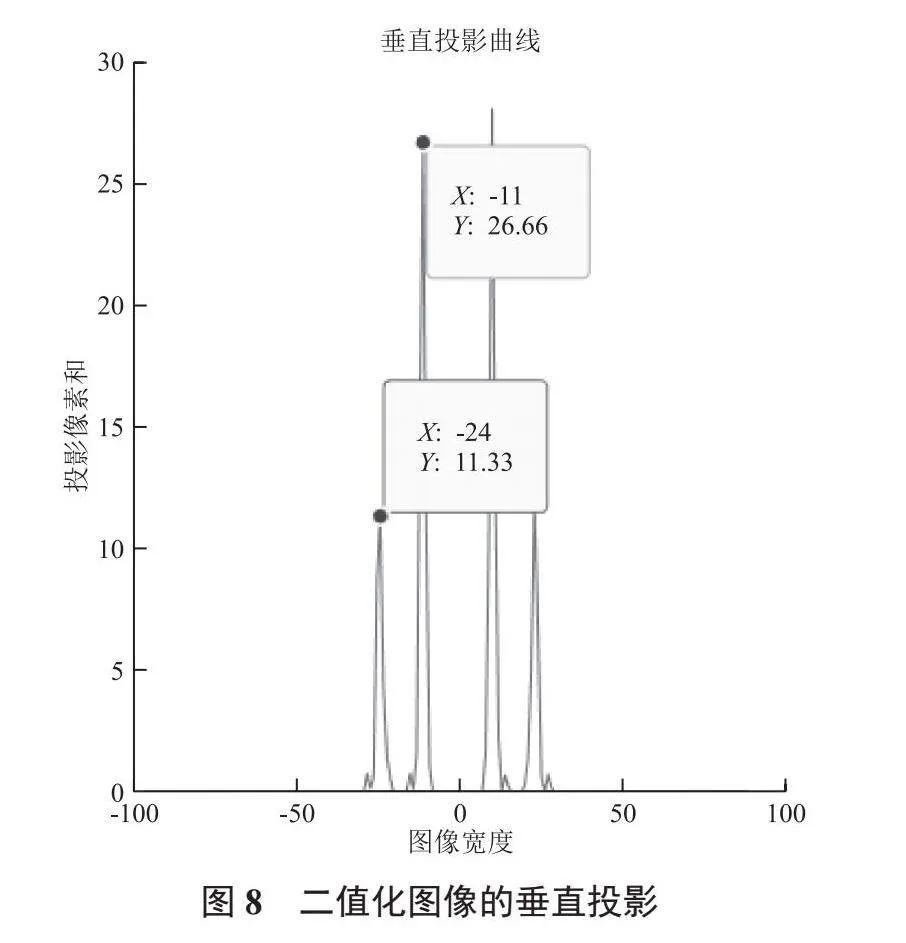
3.6 模糊尺度估计
将二值化图像按估算出的角度旋转作垂直投影,如图8所示,图中同侧相邻峰值间的距离即为相邻暗条纹的间距d(中心峰值间的间距约为2d),根据文献[1]提出的公式求出模糊长度:
(6)
式中:M和N为图像的长和宽。
4 实验结果与分析
为了验证本文算法的有效性,将其与文献[15]提出的算法进行对比实验,其参数估计结果见表1。
通过表1可以看出,本文算法在求混合模糊图像中运动模糊PSF参数问题上要比文献[15]的方法更为准确,虽然两者在模糊角度的估计上相差不大,但随着模糊尺度的增加,文献[15]对模糊尺度的估计误差越来越大,而本文方法对模糊尺度的估计误差最大不超过2 px,且平均误差比文献[15]的低3.7 px。上述结果表明,本文算法的检测精度优于文献[15]的方法。
5 结 语
为了解决混合模糊图像中运动模糊参数难以估计的问题,本文提出了一种改进的参数估计方法,通过对梯度图像直方图进行均衡化处理,使得对模糊尺度的估计结果精度更高,达到了实验要求。
参考文献
[1]高海韬,李丹宁,王彬,等.运动模糊图像PSF参数估计方法改进及图像复原[J].计算机工程,2022,48(9):197-203.
[2]孙绍祖,刘今越,史宝军.基于改进PSF参数估计的仪表模糊图像复原与识别[J].传感器与微系统,2022,41(9):109-112.
[3]华茹园,王建新.基于参数估计的图像复原算法研究与改进[J].电子设计工程,2021,29(18):166-169.
[4]廖秋香,卢在盛,彭金虎.运动模糊图像PSF参数估计与图像复原研究[J].高技术通讯,2019,29(4):338-343.
[5]胡发焕,刘国平,胡华,等.一种改进的运动模糊图像参数准确估计方法[J].控制与决策,2018,33(12):2177-2183.
[6]陈健,张欣,陈忠仁.基于Radon变换改进的运动模糊图像PSF参数估计算法[J].软件,2020,41(6):1-6.
[7]乐翔,程建,李民.一种改进的基于Radon变换的运动模糊图像参数估计方法[J].红外与激光工程,2011,40(5):963-969.
[8]怀国威,罗回彬,张振,等.基于改进模糊参数估计的R-L运动图像复原算法研究[J].现代计算机,2022,28(18):62-66.
[9]徐浩森.监控视频中运动模糊车牌图像参数估计和复原[J].河北公安警察职业学院学报,2021, 21(2):28-32.
[10]方正,曹铁勇,付铁连.基于Bottom-hat频谱方法的运动模糊参数估计方法[J].计算机科学, 2018, 45 (8):36-40.
[11]于志军,李小平,张晓康.运动模糊参数优化的图像复原方法[J].兰州交通大学学报, 2018, 37(4): 45-50.
[12]黄小芬.运动模糊车牌图像的复原算法研究与实现[J].山西大同大学学报(自然科学版),2018,34(3):35-38.
[13]梁敏.图像盲复原中的模糊退化模型估计方法研究[D].西安:西安理工大学, 2014.
[14]李楠,路小波.散焦和运动模糊复合模型及参数估计[J].仪器仪表学报,2011,32(11):2523-2529.
[15]何姣姣.运动与散焦混合模糊图像的恢复算法研究[D].昆明:昆明理工大学, 2016.
猜你喜欢
石家庄铁路职业技术学院学报(2019年3期)2019-10-30 03:26:32
电子制作(2019年15期)2019-08-27 01:12:00
电子制作(2018年19期)2018-11-14 02:37:08
苏州科技大学学报(自然科学版)(2017年1期)2017-03-20 15:25:20
中国生物医学工程学报(2017年6期)2017-02-10 05:11:45
广西科技大学学报(2016年1期)2016-06-22 13:10:38
噪声与振动控制(2015年4期)2015-01-01 07:08:21
航天返回与遥感(2014年4期)2014-07-31 17:47:47
长江大学学报(自科版)(2014年7期)2014-03-20 13:21:02
电子设计工程(2014年18期)2014-02-27 12:00:32
