无人机激光扫描测绘系统误差的模型检校技术及实验研究
2024-12-31 00:00:00曹晓桢吴健查泽超
科技创新与应用 2024年20期
关键词:算法

摘 "要:该文提出一种检验和校正无人机激光扫描测绘系统误差的技术,并设计实验对该技术的误差检校效果进行验证。该技术的实现方法是根据系统主要误差构建基于航带平差的差异分析模型。无人机航测获得扫描数据后,使用迭代最近点(ICP)算法对采集到的数据进行航带点云配准,得到航带平差。将平差参数输入到差异分析模型中解算出系统误差,利用解算结果补偿系统、消除误差,从而达到系统校正的效果。从实验结果来看,使用系统误差模型校验技术后,初始点云图和校准后的新点云图在不同方向的航带点云颜色深浅一致,说明高程误差被消除。
关键词:无人机激光扫描测绘系统;重叠航带;迭代最近点(ICP)算法;差异分析模型;误差校验
中图分类号:P231 " " "文献标志码:A " " " " "文章编号:2095-2945(2024)20-0088-04
Abstract: In this paper, a technique for checking and correcting the errors of laser scanning surveying and mapping system of unmanned aerial vehicles(UAVs) is proposed, and experiments are designed to verify the error detection effect of this technique. The realization method of this technology is to build a difference analysis model based on the adjustment of flight belt according to the main errors of the system. After the UAV aerial survey obtained the scanning data, ICP algorithm was used to register the collected data and obtain the adjustment of the band. The adjustment parameters are input into the difference analysis model to solve the system error, and the solution results are used to compensate the system and eliminate the error, so as to achieve the effect of system correction. According to the experimental results, after using the system error model verification technology, the color depth of the point clouds in different directions of the navigation belt is the same between the initial point cloud image and the calibrated new point cloud image, indicating that the elevation error is eliminated.
Keywords: UAV laser scanning mapping system; overlapping flight strip; ICP algorithm; difference analysis model; error check
利用无人机搭载激光扫描测绘系统获取地面三维信息,能够克服传统测绘方法工作量大、效率低等缺点,在地形测绘、环境监测、灾后救援等方面发挥了重要应用。为了更好地满足实际需求,对无人机激光扫描测绘系统的精度提出了更高要求。但是在实际作业过程中,由于存在激光测距误差、扫描角误差、GNSS定位误差等诸多因素的影响,导致点云数据精度不够高。如何进一步提升无人机激光扫描测绘结果的精度,成为航空遥感领域的前沿研究课题。
1 "无人机激光扫描测绘系统误差的模型检校技术
1.1 "差异分析模型的构建
随着机载激光扫描测绘系统在各个领域的广泛应用,国内外学者对于如何进行系统误差检验与校正进行了大量研究,目前,比较成熟的检校方法有分布几何法、Filin自然表面法、航带平差法等。本文选用航带平差法,其原理是将多次扫描得到的重叠航带间的同名点差异参数作为输入量,建立多参数(六参数、十二参数等)平差模型,经过模型处理后重新补偿系统,达到误差校正的目的。
1.1.1 "误差参数的选取
在无人机激光扫描测绘系统的应用中,其误差来源有多种,本文选择了比较常见的安置角误差、偏心距误差和激光测距误差,构建了平行重叠航带间的差异分析模型。同时,通过迭代最近点(ICP)算法,对相邻2条平行重叠航带进行点云配准,获得2条航带间的六参数航带平差,结合外方位角和平移向量完成对平行重叠航带的差异检测[1]。安置角是惯性传感器(IMU)与激光扫描仪连接时各个轴之间的角度,用(ω,φ,κ)表示。理论上安置角为0,但是在实际安装时由于材料误差、安装质量、配件兼容性等因素的影响,安置角存在一定的误差,表示为(Δω,Δφ,Δκ)。同样的,IMU与激光扫描仪进行中心偏移测量时,由于机载设备安装精度、外界风力和电磁干扰等因素的影响,也会产生测量偏差,即偏心距误差,用(ΔX,ΔY,ΔZ)表示。激光扫描仪在测距时,由于计时器稳定性、大气不均匀性等因素的干扰,距离的测量结果与真实值之间也会存在误差,用Δρ表示。
1.1.2 "差异分析模型的建立
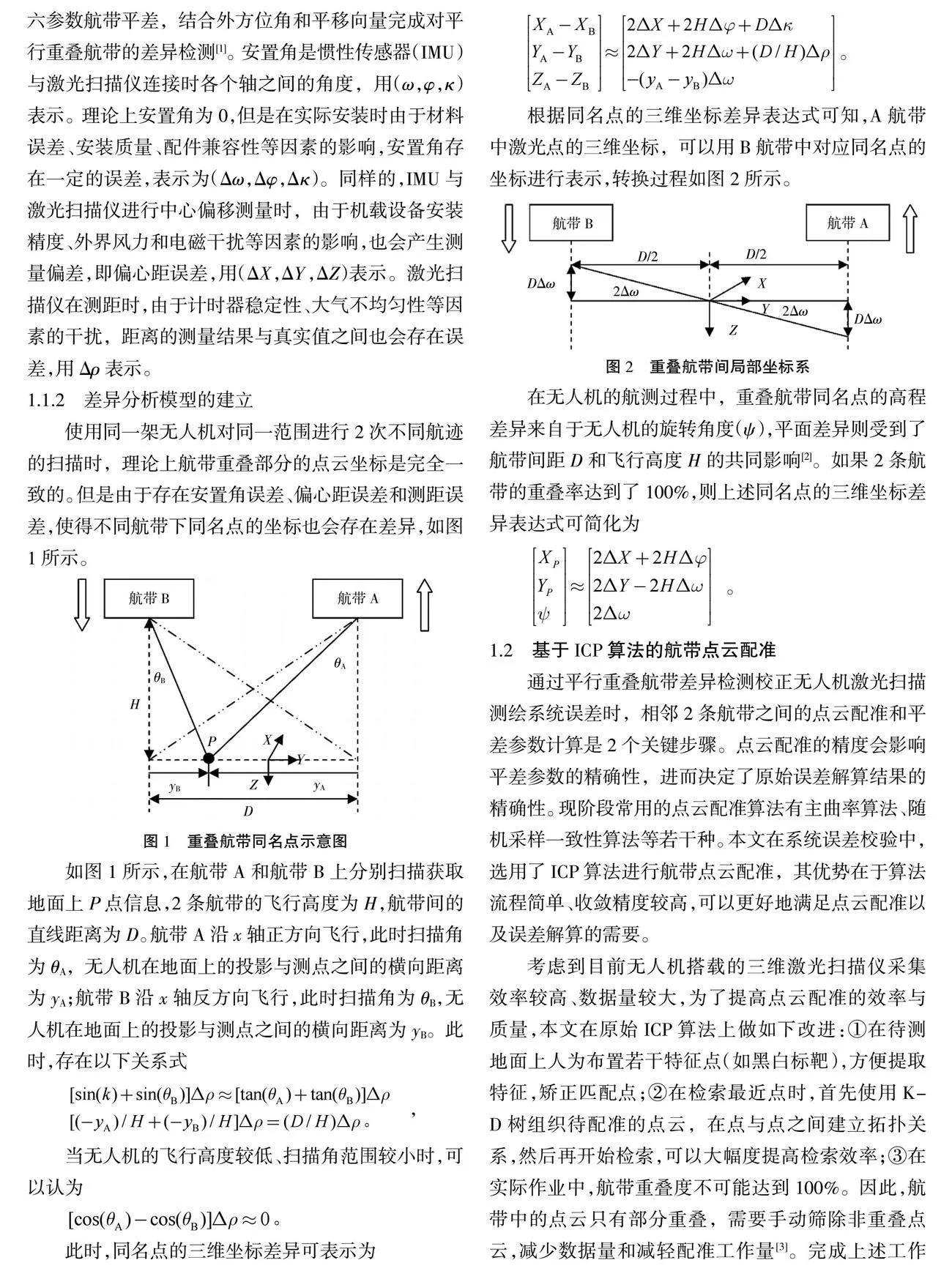
使用同一架无人机对同一范围进行2次不同航迹的扫描时,理论上航带重叠部分的点云坐标是完全一致的。但是由于存在安置角误差、偏心距误差和测距误差,使得不同航带下同名点的坐标也会存在差异,如图1所示。
如图1所示,在航带A和航带B上分别扫描获取地面上P点信息,2条航带的飞行高度为H,航带间的直线距离为D。航带A沿x轴正方向飞行,此时扫描角为θA,无人机在地面上的投影与测点之间的横向距离为yA;航带B沿x轴反方向飞行,此时扫描角为θB,无人机在地面上的投影与测点之间的横向距离为yB。此时,存在以下关系式
当无人机的飞行高度较低、扫描角范围较小时,可以认为
此时,同名点的三维坐标差异可表示为
。
根据同名点的三维坐标差异表达式可知,A航带中激光点的三维坐标,可以用B航带中对应同名点的坐标进行表示,转换过程如图2所示。
在无人机的航测过程中,重叠航带同名点的高程差异来自于无人机的旋转角度(ψ),平面差异则受到了航带间距D和飞行高度H的共同影响[2]。如果2条航带的重叠率达到了100%,则上述同名点的三维坐标差异表达式可简化为
。
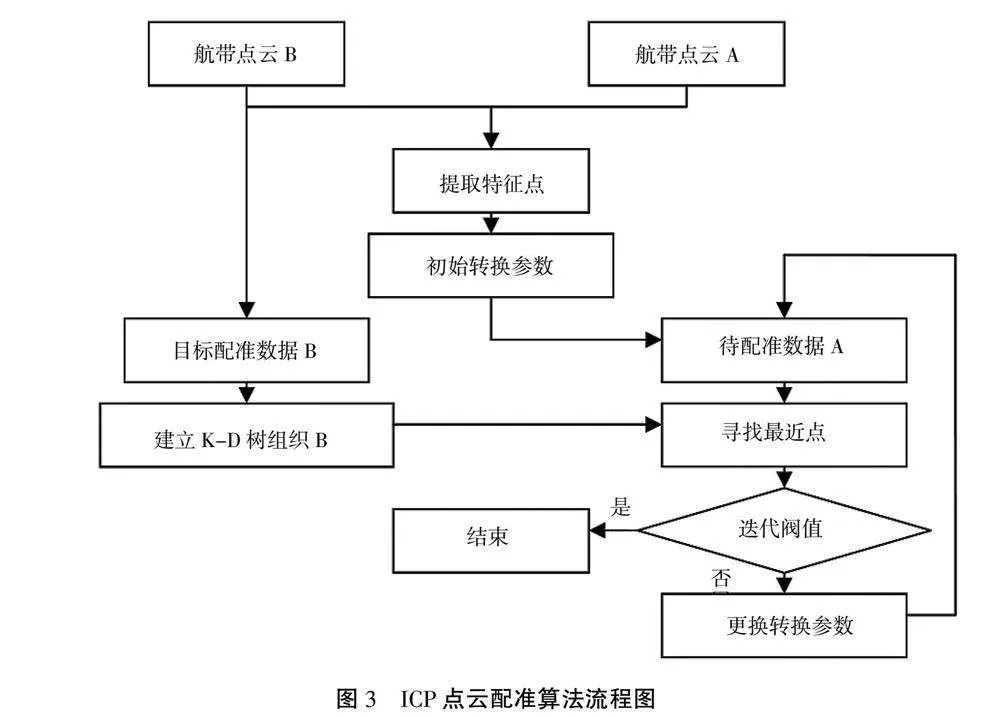
1.2 "基于ICP算法的航带点云配准
通过平行重叠航带差异检测校正无人机激光扫描测绘系统误差时,相邻2条航带之间的点云配准和平差参数计算是2个关键步骤。点云配准的精度会影响平差参数的精确性,进而决定了原始误差解算结果的精确性。现阶段常用的点云配准算法有主曲率算法、随机采样一致性算法等若干种。本文在系统误差校验中,选用了ICP算法进行航带点云配准,其优势在于算法流程简单、收敛精度较高,可以更好地满足点云配准以及误差解算的需要。
考虑到目前无人机搭载的三维激光扫描仪采集效率较高、数据量较大,为了提高点云配准的效率与质量,本文在原始ICP算法上做如下改进:①在待测地面上人为布置若干特征点(如黑白标靶),方便提取特征,矫正匹配点;②在检索最近点时,首先使用K-D树组织待配准的点云,在点与点之间建立拓扑关系,然后再开始检索,可以大幅度提高检索效率;③在实际作业中,航带重叠度不可能达到100%。因此,航带中的点云只有部分重叠,需要手动筛除非重叠点云,减少数据量和减轻配准工作量[3]。完成上述工作后,使用改进的ICP算法进行点云配准,流程如图3所示。
2 "无人机激光扫描测绘系统误差模型检校实验
2.1 "实验设计
本实验选用曜宇Long120六旋翼无人机,轴距1.6 m,最大载荷8 kg,空载飞行时间120 min,搭载北科天绘云雀激光扫描测绘系统,最大探测距离1 500 m,测距精度10 mm@100 m,高程测量精度±5 cm,具有多次回波。该激光扫描测绘系统由激光扫描仪、组合惯性单元(IMU、GNSS)和数字相机组成。为保证系统的稳定可靠,将所有设备封装在一个长方体中,固定在无人机下方。无人机在航测过程中收集到的海量扫描数据,存储在专用SSD中,由地面站应用软件完成对原始点云数据的处理,包括前期的降噪、滤波和后期的点云配准、影像数据融合等[4]。处理结果在OpenGL三维显示器上进行可视化呈现。
将某建筑物楼顶作为本次实验场地,为了获取点云特征和增加点云配准精度,在实验现场放置了2个尺寸为100 cm×40 cm×50 cm的箱子作为标志物。在建筑楼顶搭建了模拟飞行平台,保证GNSS信号的收发质量。设定无人机的模拟飞行高度为10 m,平移距离1.6 m。规划航线为自东向西正向和反向分别扫描4次。
2.2 "实验结果与分析
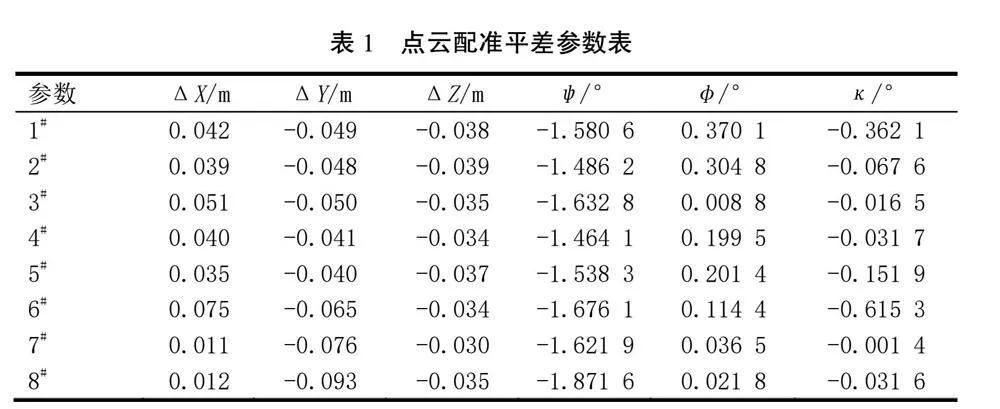
无人机沿着x轴分别完成正方向和负方向的航测后,共采集到170 445个激光点。横滚角的波动范围±0.3°,俯仰角的变化范围±0.2°,对航测数据的可用性不构成影响,可以忽略不计。由于地面布置了2个特征点,因此所得的扫描数据中存在2片大面积重叠的点云,特征较为明显,为ICP点云配准创造了有利条件。另外,在原本平坦的楼顶,点云图的颜色呈现出深浅不一的现象,由于颜色深浅代表了高程变化,说明测绘结果中楼顶各处的高程不一致,与实际情况不符,表明本实验使用的无人机激光扫描测绘系统存在误差[5]。使用改进的ICP算法对2种航迹下的点云进行配准后,可以求得航带平差。在此基础上分别对反向部分重叠航带、反向完全重叠航带的多次扫描点云数据进行配准,得到三维坐标误差(ΔX,ΔY,ΔZ)、安置角误差(φ,κ)和旋转角度(ψ)的8组参数,见表1。
以点云配准后得到的平差参数作为输入量,输入到差异分析模型中,可以输出原始系统的参数误差,见表2。
将差异分析模型的解算结果补偿到无人机激光扫描测绘系统中,更新原始数据后重新生成新的点云图。对比初始点云图和校准后的新点云图,可以发现2幅图中不同方向航带点云的颜色深浅一致,说明高程差被消除,达到了校正无人机激光扫描系统误差的效果。
3 "结束语
无人机激光扫描测绘系统的定位精度受到多方面因素的影响,如测绘距离、飞行姿态、扫描角误差、GNSS定位误差等。当误差较大时,会导致最终呈现出来的三维地表信息局部丢失或失真,参考价值也会大打折扣。因此,为了保证三维点云坐标的精确性和三维地表信息的真实性,必须要尽可能地减小甚至是消除误差。基于航带平差的模型校验技术,选取影响系统精度的误差源构建了差异分析模型,然后使用ICP算法进行航带点云配准,将配准后的平差参数输入到建立的模型中进行解算,用解算结果补偿系统,使得系统误差得以校正,扫描测绘精度也得到了进一步的提升。
参考文献:
[1] 汤立坤.无人机三维激光扫描技术在矿区岩移数据测量中的应用[J].价值工程,2023(25):85-87.
[2] 丁志广,饶帅雄,王田芳.激光扫描与无人机空地一体融合测量应用[J].测绘通报,2023(1):179-183.
[3] 厉彦一.适用于测绘四旋翼无人机的模糊PID控制算法及仿真[J].测绘通报,2020(18):61-63.
[4] 张永明.轻小型无人机遥感定位系统误差消除技术研究[J].计算机测量与控制,2021(5):234-236.
[5] 孙贵平.无人机空中激光扫描测绘系统的设计与实现分析[J].现代测绘工程,2020(10):26-28.
猜你喜欢
成都信息工程大学学报(2019年4期)2019-11-04 00:56:02
阅读与作文(英语初中版)(2019年8期)2019-08-27 03:59:25
小学生学习指导(低年级)(2018年11期)2018-12-03 05:05:00
中学生数理化·高一版(2017年9期)2017-12-19 12:15:15
西安工程大学学报(2016年6期)2017-01-15 14:09:28
现代防御技术(2016年1期)2016-06-01 12:13:27