
密集非稳状态时间下机械液压立体停车装置高精度控制方法
2024-12-28 00:00:00吉汝哲夏磊
机械制造与自动化 2024年6期




摘要:液压立体停车装置的车位控制是一个主动机械升降控制过程,仅以用户等待时间为约束条件的方法,在车辆密集程度呈现非稳状态下,存在控制精度较差等缺陷。设计一种车辆密集非稳状态时间下机械液压立体停车装置高精度控制方法。分析机械液压立体停车装置中车辆的交织控制条件,构建空间控制模型。考虑液压立体停车装置停车密集度约束和用户停车的非稳状态时间约束,构建停车装置控制模型。采用蚁群优化算法求解空间控制模型和时间控制模型,完成车辆密集下机械液压立体停车装置控制。仿真结果表明:所提方法控制下泊车机器人移动步数平均为10步,移动距离平均为32 m,用户等待时间均控制在1min以内,平均停车时间为56 s,优化效果较好。
关键词:密集非稳状态时间;机械液压立体停车装置;车辆交织;蚁群优化算法
中图分类号:TP273文献标志码:A文章编号:1671-5276(2024)06-0234-05
Abstract:The parking space control of hydraulic stereo parking device is an active mechanical lifting control process, only taking user's waiting time as a constraint. When the vehicle density is unstable, defects such as poor control accuracy occur. The high precision control method of the mechanical hydraulic stereoscopic parking device under the time of dense and unstable vehicles is designed. The weaving control conditions of vehicles in the mechanical hydraulic stereoscopic parking device is studied to construct the spatial control model. Considering the parking density constraint of hydraulic stereo parking device and the unstable state time constraint of user parking, the parking device control model is built. Ant colony optimization algorithm is used to solve the space control model and time control model to complete the control of the mechanical and hydraulic three-dimensional parking device under dense vehicles. The experimental results show that under the control of the proposed method, the average number of moving steps of the parking robot is 10, the average moving distance is 32 m, the user's waiting time is controlled within 1 min, and the average parking time is 56 s, which verifies that the optimization effect is good.
Keywords:time of unstable density; mechanical hydraulic three-dimensional parking device; vehicle weaving; ant colony optimization algorithm
0引言
传统停车场在社会飞速发展和汽车占有率不断增加的背景下,难以满足用户的停车需求,停车场的面积利用率低和车辆停放效率低等问题逐渐凸显出来[1]。机械液压立体停车装置的出现,很好地解决了相关问题。机械液压立体停车装置与传统停车场不同,在车辆停放过程中应用了泊车机器人,在泊车机器人的帮助下可有效完成车辆的停放工作[2]。针对液压立体停车控制问题的研究较多。邵长桥等[3]首先分析了停车附近的路网情况以及通行能力,根据分析结果计算停车生成率,设置约束条件,建立车场通行能力模型,并根据实测数据标定模型中的关键参数,实现车场停车控制。该方法在控制过程中泊车机器人的移动步长和移动距离较大。LI等[4]首先考虑用户的满意度,提出了一种立体车库控制优化方法,设定了用户满意度和停车资源之间的函数关系,采用了改进的遗传算法从而寻找最优控制结果。该方法可以在一定程度上提高用户停车满意度,但排队等待时间方面可以进一步优化。以上方法均以等待时间为约束条件,与传统停车场不同,机械液压立体停车控制过程是一个密集、非稳态过程,单纯以时间作为约束条件,而忽略这一过程的控制方法存在较大缺陷。
为了缩短停车等待时间,完善上述方法中存在的问题,本文提出车辆密集非稳状态时间下机械液压立体停车装置高精度控制方法。根据机械液压立体停车装置存在的控制问题,构建了密集停车控制模型,其中空间控制模型用于解决停车密集度问题并设置时间非稳态约束,即减少移动步长与移动距离,解决传统控制方法中存在的问题。
1机械液压立体停车装置控制前提条件假设
用栅格化地图表示液压立体停车装置,车场中存在障碍物和车位,出口和入口的数量分别为mo、mE,在液压立体停车装置中共存在Q个车位,第m个车位在停车装置中的状态表示为Pm={pm,k|k∈[1,Q]},其中m∈[1,mE],pm,k代表的是第k个车位。库位指标选取车位pm,k与最近出口和入口距离的总和fm,k,根据fm,k排序状态Pm,使其符合fm,k≤fm,k+1。在得到以上参数后,可对控制条件进行如下描述。
泊车机器人根据车辆向机械液压立体停车装置发出的入库申请和出库申请将车辆搬运到相应的位置。用R={ri|i∈[1,Z]}表示机械液压立体停车装置中的泊车机器人,其中,Z表示机械液压立体停车装置中泊车机器人的数量。在每次工作过程中,泊车机器人只能搬运一辆车,在搬运过程中需要控制泊车机器人处于均匀运动。泊车机器人在搬运过程中的总代价VR可通过下式计算得到:
式中S表示时间代价系数。
针对向机械液压立体停车装置提出停放申请的车辆vi,已知其申请出库时间、申请时间ti、停放时间Ti、车辆质量mi,认为车辆在机械液压立体停车装置中的最大等待时间TSi、停放时间和质量互相独立,且满足均匀分布,即TSi=U(TS,min,TS,max)、Ti=U(Tmin,Tmax)、mi=U(mmin,mmax)。
当机械液压立体停车装置中存在空闲停车位且泊车机器人处于空闲状态时,需要立即将车辆搬运到停车装置中。停放在车位中的车辆只有到达预先设定的出库时间才可以搬运。当最大等待时间小于车辆等待时间时,车辆放弃进入停车装置。用gr,i表示车辆是否放弃进入停车装置停车,当gr,i的值为1时,表明放弃。在上述机械液压立体停车条件下设计密集非稳状态时间下停车装置控制模型。
2密集非稳状态时间下装置高精度控制模型
1)车辆非稳态交织条件
车辆在机械液压立体停车装置中产生交织的主要原因如下:
a)车辆流在液压立体停车装置中的路径存在重复部分;
b)交织时差阈值大于车辆出场时差。
出场时差属于客观条件,通常情况下由车辆离开机械液压立体停车装置的时间决定;泊车装置为车辆分配的停车位决定了流线路径是否存在重叠部分[5-6]。通过上述分析可知:在停车装置密集停车控制过程中,降低车辆的时空重叠现象可以避免交织现象的发生。
2)停车密集度约束下的控制模型
建立停车密集度约束下的控制模型需要依据停车装置的结构设计,机械液压立体停车装置形状及车位序号示意如图1所示。
图1中,0车位为入库车位序号,1、5、9为车位序号顺序。在下文的模型构建中,车位序号以图示为依据。
a)空间控制模型
为避免发生交织情况,提高停车密集度,需要设定空间控制模型。按照从小到大的顺序,在控制时间内将车位序号排成一维数组B,b为数组B中的最大值,m、n为数组B中存在的元素,建立空间控制模型:
式中:Cc为车辆在控制过程中的总交织次数;E(m,n)为二值函数,用于判断机械液压立体停车装置中第m辆车与第n辆车之间是否存在交织情况[7-8],就是停车密集度。如果存在较高的停车密集度,函数E(m,n)的值为1;如果不存在,函数E(m,n)的值为0。
空间控制模型的约束条件如下:
式中:Eet表示车辆在机械液压立体停车装置中的最大停车密集度;Bp(m)、Bp(n)分别表示第m辆车与第n辆车在车场中被分配到的停车位序号。
b)非稳态时间约束下的控制模型
设M代表路径重叠矩阵,Fs(m,n)代表车辆在机械液压立体停车装置中的出场时差,上述二值函数E(m,n)的值可通过M、Fs(m,n)计算得到,考虑用户的等待时间的非稳态,建立时间控制模型:
式中:ts(m)、ts(n)表示第m辆车与第n辆车离开机械液压立体停车装置的时间;tp(m)表示第m辆车在机械液压立体停车装置中的内行程时间,可根据流线路径计算:
式中:t(m)表示空间时间;tc(m)表示损失时间;d(m)表示机械液压立体停车装置中的停车位序号;dp表示流线路径对应的通道长度[9-10];df表示在车场首层流线对应的行驶长度;dr表示坡道在流线路径中的长度;v表示机械液压立体停车装置中的车辆限速;wt表示单次停车密集度中车辆对应的损失时间。根据上述计算结果,获得车辆在机械液压立体停车装置中的停车位序号,进而确定车流线路径。
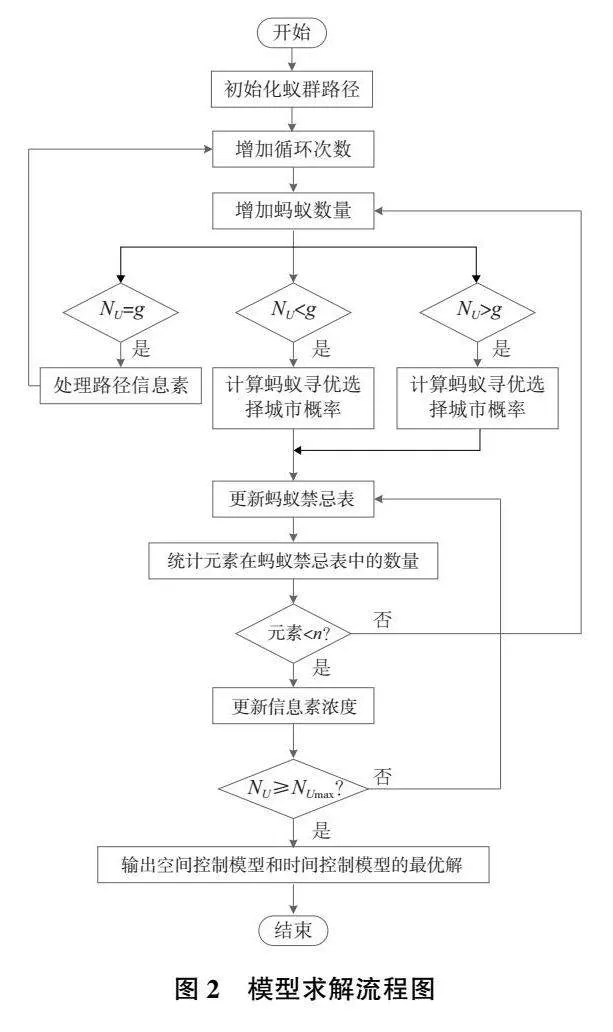
3机械液压立体停车装置高精度控制模型求解
考虑非稳态时间和停车密集度约束的机械液压立体停车装置高精度控制模型,采用蚁群优化算法对上述控制模型求解,具体过程如下。
1)初始化,设n表示蚂蚁寻优过程中的目标解数量,构成集合U,设置蚁群优化算法的最大循环次数NUmax和循环次数NU,参与模型寻优的蚂蚁共m只,将控制模型寻优过程分为两个阶段,第一个阶段由前g次循环构成,第二个阶段由剩余循环构成,在初始阶段将循环次数和时间设置为0,路径中存在的信息素浓度设置为τi,j(t)=const[11-12],其中const为常数,Δτi,j(0)=0。
2)增加蚂蚁寻优过程中的循环次数,即
3)增加参与控制模型寻优的蚂蚁数量,即k=k+1,并在此过程中对蚂蚁禁忌表tabu,k展开初始化处理。
4)当NU与g相等时,统计m条路径中存在的信息素浓度并按照从大到小的顺序对信息素浓度排序,选取前len条路径组建列表L,清空剩余路径中存在的信息素,重新初始化处理len条路径中的信息素[13-14],并转到步骤2)。
5)当循环次数NU小于g时,通过下述公式计算下次寻优过程中蚂蚁选择的城市j的概率pki,j(t),在蚂蚁禁忌表tabu,k中存入城市j:
式中:allowed,k表示尚未访问的邻接节点s′构成的集合;下角标(i,j)、(i,s′)均表示蚂蚁的寻优路径;α表示信息素的相对重要程度;η(t)表示启发式因子;β表示η(t)的相对重要程度;ζ表示拥挤系数;CRi表示拥挤因子,可用于描述路径(i,j)的实际拥挤程度,其表达式如下:
式中mi,j表示蚂蚁经过路径(i,j)的数量。
6)当循环次数NU大于g时,利用上式计算下次寻优过程中蚂蚁选择的城市j的概率,在蚂蚁禁忌表tabu,k中存入城市j[15]。
7)更新蚂蚁禁忌表。
8)统计元素在蚂蚁禁忌表中的数量,如果元素少于n个,转入步骤3)。
9)在路径中更新信息素浓度。
10)如果循环次数NU大于等于最大循环次数NUmax,输出空间控制模型和时间控制模型的最优解,实现机械液压立体停车装置高精度控制,否则返回步骤7)。
模型求解流程如图2所示。
4仿真与分析
4.1仿真环境
为了验证本文方法的整体有效性,需要在Matlab 平台对其展开进行相关测试,仿真所需的随机变量由随机数函数生成。所有实验均在配备Intel i7CPU和8GB RAM的PC上完成。实验采用平面移动式机械立体车库,该车库的特点为:每层的车台和升降机分别动作,提高了车辆的出入库速度,可自由利用地下空间,停车规模可达到数千台,部分区域发生故障时,不影响其他区域的正常运行,因此使用更加方便;采用以车辆驾驶员为中心的设计方法,提高了舒适性;采取多重保险措施,安全性能卓越;通过计算机和触屏界面进行综合管理,可全面监视设备的运行状况并且操作简单。具体的机械立体车库结构如图3所示。
单独的机械立体车库的泊车位数量为12台,升降速度为0.2m/s,升降电机功率为7.5kW,入库方式为倒车入库。泊位上限车长为5.3m,泊位上限车宽为2m,泊位上限车高为1.55m,泊位车辆质量上限为1.8t。设停车装置共有10个机械液压立体停车设备,共有泊车位120个。模拟的输入数据是任务生成模块生成的要移动车辆的起点、终点和相对优先级,仿真的输出数据是每个停车机器人装卸过程所用的时间和行驶路径距离。通过标定,算法中的参数设置为:时间代价系数S=1,车辆在机械液压立体停车装置中的最大停车密集度Eet=5,信息素浓度τi,j(t)=0.5。
停车装置的服务需要面向不同时段、不同类型的停车需求,呈现一种密集非稳状态。除了高峰时段的运营数量增加外,运营类型也在发生变化。本文以某医院停车取车的数据记录为例,早晨时段(7:30—9:30),停车比取车多(时段1);中午时段(11:30—13:30),取车和停车的数量大致相等(时段 2);下午下班时段(16:30—18:30),取车比停车的数量多(时段3)。由于这3个时段具有普遍性和代表性,也可以反映车库在繁忙时段的运行状况。在Matlab平台中使用exprnd命令模拟输入3个时段内复合指数分布的数据组。
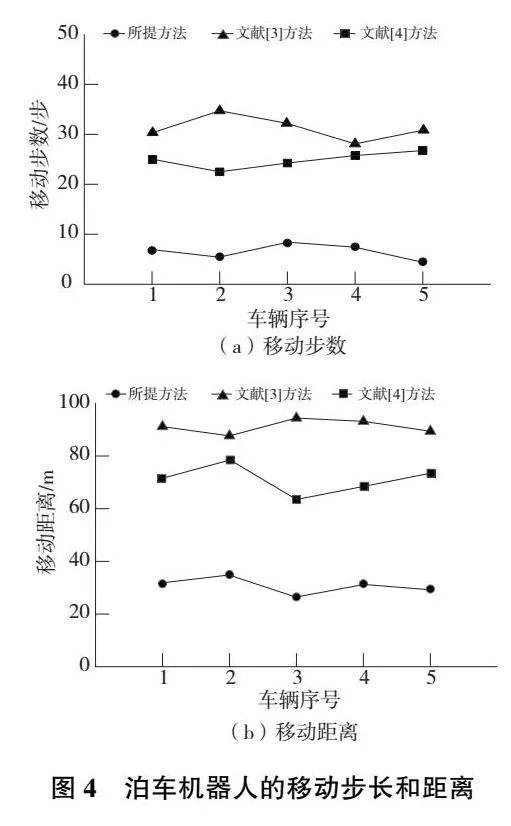
4.2泊车机器人的移动步长和距离对比
选用考虑用户等待时间的机械立体车库密集停车控制方法、文献[3]方法和文献[4]方法在下述机械立体车库中展开停车控制测试。随机选取5辆车,采用所提方法、文献[3]方法和文献[4]方法对其控制,在控制过程中泊车机器人的总移动步数和移动距离越少,表明控制效果越好,上述方法的测试结果如图4所示。
由图4可知,在车辆控制过程中,泊车机器人的移动步长与移动距离之间成正比。对5辆车控制时,所提方法泊车机器人的移动步长最少,移动距离最短,泊车机器人移动步数平均为10步,移动距离平均为32m。因为所提方法建立的空间控制模型,可准确地获取立体机械车场内的空余车位,为车辆匹配最近的车位,降低了泊车机器人的移动步长和距离。
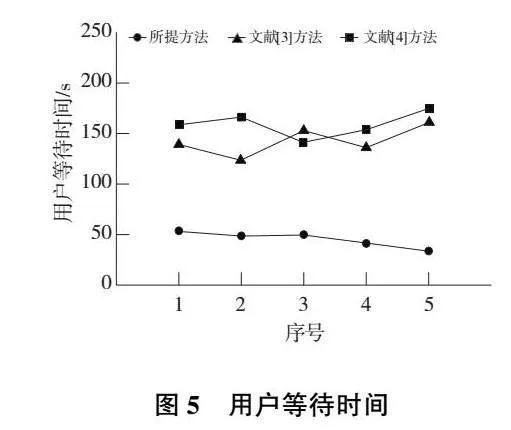
4.3用户等待时间对比
将用户等待时间作为指标,用户等待时间越短,说明停车控制效果越好。采用上述方法展开测试,测试结果如图5所示。
在上述测试过程中,所提方法的用户等待时间均控制在1min以内,文献[3]方法和文献[4]方法的用户等待时间均超过2min。经对比发现,在机械液压立体停车装置停车控制过程中,所提方法的用户等待时间最少,因为所提方法在机械液压立体停车装置的停车控制条件下,根据分析结果在控制过程中建立时间控制模型,根据车辆的停车位序号和流线路径展开停车控制,可有效缩短用户的等待时间。
4.4停车装置平均停车时间对比
在上述实验环境下,模拟了所提方法、文献[3]方法和文献[4]方法的平均停车时间。平均停车时间即总停车时间的平均值,总停车时间包括停车冲突时间、运营时间内所有车辆在停、取车辆过程中消耗的时间总和,实验数据由仿真平台自动记录生成结果。测试结果如图6所示。
由图6可知,随实验次数的增加,对比其他两种方法,所提方法的平均停车时间的均衡度更好,平均停车时间为56s,总停车时间较为稳定,停车数量的均衡度较好。因为所提方法考虑液压立体停车装置停车密集度约束和用户停车的非稳状态时间约束,又采用了蚁群优化算法求解空间与时间控制模型,缩短了平均停车时间。
5结语
在投资限制、规划限制和地价限制的情况下,无法通过建设更多的停车装置解决停车位紧张、停车排队时间长等问题,在此背景下本文提出了车辆密集非稳状态时间下机械液压立体停车装置高精度控制方法。目前机械液压立体停车装置停车存在泊车机器人移动步长大、距离长和用户等待时间长的问题,本文提出考虑用户等待时间的密集停车控制方法。该方法在控制过程中建立空间控制模型和时间控制模型,采用蚁群优化算法实现密集停车控制,解决了目前方法中存在的问题,为机械液压立体停车装置的建设和发展奠定了基础。
参考文献:
[1] 张成国,玉钰,施韧,等. 上海轨道交通2号线龙阳路停车场CBTC改造后的运营能力分析[J]. 城市轨道交通研究,2020,23(6):159-161,165.
[2] 王俊飞,汪成文,佘占蛟. 无避让立体停车装置液压系统的动态特性[J]. 液压与气动,2022,46(1):143-149.
[3] 邵长桥,邵晓菲,吕鲲,等. 大型公共停车场合理规模计算方法研究[J]. 重庆交通大学学报(自然科学版),2020,39(4):17-22.
[4] LI M, HAN Q, ZHAO Z, et al. Research on new scheduling optimization of three-dimensional garage based on genetic algorithm[J]. The Frontiers of Society, Science and Technology, 2020, 2(6): 58-67.
[5] 蒋睿,祝锡晶,马宁,等. 基于改进混合粒子群算法的智能车间无人机巡检路径规划[J]. 机械设计与制造工程,2023,52(2):51-57.
[6] 谢济铭,秦雅琴,彭博,等. 多车道交织区车辆跟驰行为风险判别与冲突预测[J]. 交通运输系统工程与信息,2021,21(3):131-139.
[7] 陈建凯,肖亮,覃鹏,等. 基于交织的立体综合车场公交调度优化模型研究[J]. 交通运输系统工程与信息,2020,20(3):169-173,226.
[8] CHEN Y Z,WANG T,YAN X C,et al. An ensemble optimization strategy for dynamic parking-space allocation[J]. IEEE Intelligent Transportation Systems Magazine,2023,15(1):347-362.
[9] YANG Y H,WANG J C,XIA Y B,et al. Three-dimensional stopping sight distance calculation method under high slope restraint[J]. Applied Sciences,2020,10(20):7118.
[10] 何胜学. 公交车辆调度的超级时空网络模型及改进和声搜索算法[J]. 计算机应用研究,2021,38(10):3078-3084.
[11] 李乾,胡玉鹏,叶振宇,等. 基于蚁群优化算法的纠删码存储系统数据更新方案[J]. 计算机研究与发展,2021,58(2):305-318.
[12] 李燚,唐倩,刘联超,等. 基于改进蚁群算法的汽车混流装配调度模型求解[J]. 中国机械工程,2021,32(9):1126-1133.
[13] 李常敏,魏文彬,张露. 考虑匹配优先级的共享混合停车位租用与分配问题研究[J]. 交通运输系统工程与信息,2022,22(3):190-197,223.
[14] WANG X W,SHI H,ZHANG C. Path planning for intelligent parking system based on improved ant colony optimization[J]. IEEE Access,2020,8:65267-65273.
[15] LIU Q,ZHANG Y,WANG Y,et al. Research on parking space allocation of stereo garage based on improved genetic algorithm[C]//Deng Z. Proceedings of 2021Chinese Intelligent Automation Conference. Singapore:Springer,2022:1-10.
收稿日期:20230321
基金项目:江苏省青苗人才培养工程项目(CZQM2021082);江苏省科技创新合作重点项目(2022Y0126510)
第一作者简介:吉汝哲(1989—),男,江苏常州人,工程师,本科,研究方向为机械工程,jjjeee2223@163.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.046
