
高空作业防坠器防坠制动状态监测与预警方法
2024-12-28 00:00:00潘文雅陈宏同周良绩
机械制造与自动化 2024年6期

摘要:当前防坠制动状态监测过程较为被动,以事故发生后的传感信号识别为主,忽略了事故发生前制动绳的冲击力学特征,导致预判性差。为此,提出一种引入制动绳冲击力学特征的高空作业防坠器防坠制动状态监测与预警方法。针对防坠器制动绳冲击力学展开分析,将力学特征引入防坠制动过程中的相关条件,根据制动减速度、制动力、制动距离建立防坠制动状态阈值区间。利用不同传感器采集防坠制动过程的状态数据变化,将实际的防坠制动力与阈值区间作对比,判断是否需要发出预警。实验结果表明:该方法具有较高的状态监测精度与预警精度。
关键词:高空作业;防坠器;冲击力学模型;制动状态监测;预警;制动距离
中图分类号:TM08;TP277文献标志码:B文章编号:1671-5276(2024)06-0185-05
Abstract:In order to improve the poor prediction of monitoring anti-fall braking status due to the post-accident recognition of the sensing signal and ignore of the pre-war impact mechanical characteristics of brake rope, a method of monitoring and warning the fall arrest braking status of the fall arrest device for aerial work is proposed by introducing the impact mechanical characteristics of the brake rope. The impact mechanics of the brake rope of the fall arrester is analyzed, and the mechanical characteristics are introduced into the relevant conditions of the fall arrest braking process. According to the braking deceleration, braking force and braking distance, the threshold range of the fall arrest braking status is established. Different sensors are used to collect the state data changes during the anti-falling braking process, and the actual anti-falling braking force is compared with the threshold interval to determine whether an early warning is needed. The experimental results show that the proposed method has high precision of condition monitoring and early warning.
Keywords:working at heights; falling protector; impact mechanical model; braking status monitoring; early warning; braking distance
0引言
在高空作业领域中,防坠器是一种重要的安全设备,保护着工作人员的生命安全[1]。防坠器的工作原理是通过制动过程避免罐笼发生急速下降或坠落。防坠器的制动性能是指当罐笼发生意外时,在制动绳抓捕处开始制动减速,其制动性能可通过制动绳冲击行为判断[2]。
为了提高高空作业人员的安全性,需要对防坠器的防坠制动状态展开监测,并根据监测结果实时预警。为此,邵瑞影等[3]首先在AMESim中对防坠器的工作性能展开分析,根据性能分析结果建立防坠器系统模型,在仿真的基础上获得防坠器的流量特性、速度曲线和制动距离以此完成状态监测和预警。但是该方法难以准确地监测罐笼的加速度与减速度,状态监测精度还有待提高。而在制动状态监测方面,马天和等[4]设置观测器获取制动实时信息,并通过Polach模型对制动过程展开仿真模拟,根据仿真数据实现监测与预警。但是在实际应用中发现,该方法采集的制动信息精准度偏低,降低了最终的预警精度。
当前坠落制动状态监测过程较为被动,以发生事故后的传感信号识别为主,忽略了事故发生前制动绳的冲击力学特征,导致预判性差。为了解决上述方法中存在的问题,本文设计了一种高空作业防坠器防坠制动状态监测与预警方法。
1防坠器制动绳冲击力学阈值预警区间计算
高空作业防坠器结构如图1所示。
在防坠制动过程中,罐笼会通过防坠器在极短的时间内抓捕并悬挂在制动绳上。与整个制动绳相比,缓冲器中抽出的缓冲绳长度较短[5-6]。因此,在建立冲击力学模型时,对高空作业防坠器防坠制动状态监测与预警方法做出如下假设:
1)不考虑横向中制动绳产生的振动;
2)制动过程通常在0.15s以内,因此不考虑系统阻尼对制动过程产生的影响;
3)缓冲绳冲出缓冲器时受到的阻力属于恒定阻力。
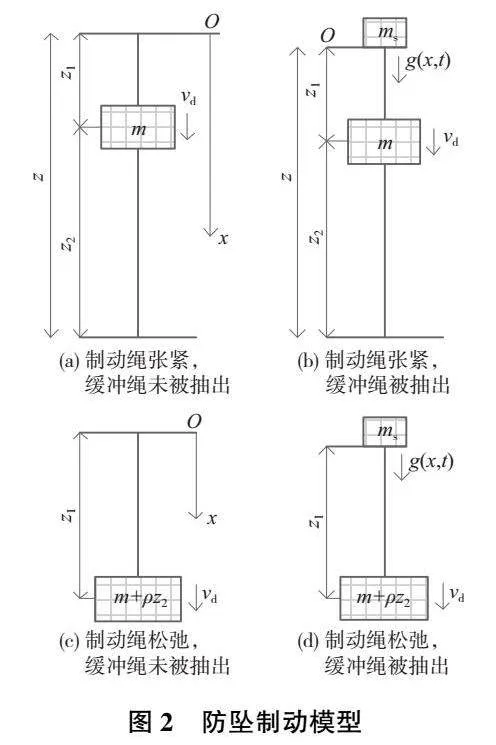
在上述条件的基础上,建立防坠制动绳冲击力学模型,如图2所示。
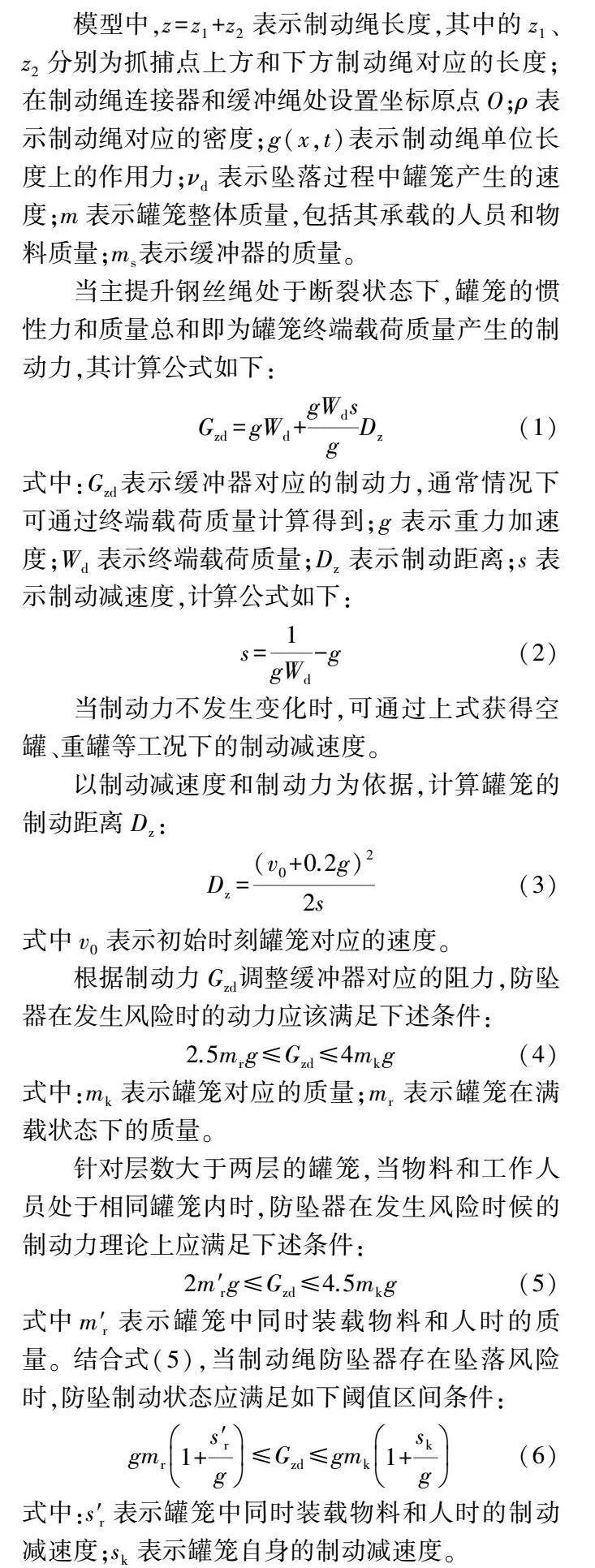
模型中,z=z1+z2表示制动绳长度,其中的z1、z2分别为抓捕点上方和下方制动绳对应的长度;在制动绳连接器和缓冲绳处设置坐标原点O;ρ表示制动绳对应的密度;g(x,t)表示制动绳单位长度上的作用力;νd表示坠落过程中罐笼产生的速度;m表示罐笼整体质量,包括其承载的人员和物料质量;ms表示缓冲器的质量。
当主提升钢丝绳处于断裂状态下,罐笼的惯性力和质量总和即为罐笼终端载荷质量产生的制动力,其计算公式如下:
式中:Gzd表示缓冲器对应的制动力,通常情况下可通过终端载荷质量计算得到;g表示重力加速度;Wd表示终端载荷质量;Dz表示制动距离;s表示制动减速度,计算公式如下:
当制动力不发生变化时,可通过上式获得空罐、重罐等工况下的制动减速度。
以制动减速度和制动力为依据,计算罐笼的制动距离Dz:
式中v0表示初始时刻罐笼对应的速度。
根据制动力Gzd调整缓冲器对应的阻力,防坠器在发生风险时的动力应该满足下述条件:
式中:mk表示罐笼对应的质量;mr表示罐笼在满载状态下的质量。
针对层数大于两层的罐笼,当物料和工作人员处于相同罐笼内时,防坠器在发生风险时候的制动力理论上应满足下述条件:
式中m′r表示罐笼中同时装载物料和人时的质量。结合式(5),当制动绳防坠器存在坠落风险时,防坠制动状态应满足如下阈值区间条件:
式中:s′r表示罐笼中同时装载物料和人时的制动减速度;sk表示罐笼自身的制动减速度。
2制动状态监测与预警方法设计
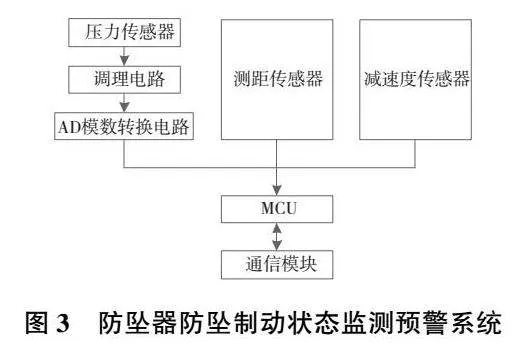
为了提高监测预警结果的稳定性和准确性,本文使用双核心处理方式,并利用MCU处理器[7-8]对传感器采集的力学数据进行处理。此外,利用红外传感器采集钢缆信息,利用减速度传感器采集坠落相关预警信息,运用压力传感器作为锁紧传感器。通过上述传感器采集的信息,结合防坠制动状态阈值区间,对高空作业防坠器的制动状态展开监测。若防坠器存在坠落风险,应及时检测完成滑块锁紧、人员坠落和钢缆位置,以此实现防坠器防坠制动状态的监测与预警。
高空作业防坠器防坠制动状态监测与预警方法建立的监测预警模块如图3所示。
1)压力传感器。该部分电路由3个部分构成,分别为A/D模数转换电路、信号调理电路和薄膜压力传感器。
a)A/D模数转换电路。MCU在防坠器防坠制动状态监测预警系统中无法处理模拟量,只能处理数字量。因此,在构建系统的过程中,设置A/D模数转换电路,其主要作用是处理压力传感器采集的模拟量,将其转变为数字量[9-10],并将其输入MCU中。
b)信号调理电路。信号调理电路在系统中的主要目的是对压力传感器进行标校处理,针对初始状态下的压力传感器,需要标定其额定点的数据以及0点数据。传感器在应用过程中都会表现出不同程度的非线性,增设信号调理电路可避免压力传感器在系统中出现线性度问题。
c)薄膜压力传感器。薄膜压力传感器由上、下两层构成,中间设有感应区域。当力作用在感应区域时,传感器底层电路处于导通状态,传感器的输出电阻直接体现了压力的变化情况[11-12]。
2)测距传感器。红外传感器中设置有一对二极管,红外信号的发射与信号的接收均由二极管完成,数字传感器将返回的红外信号传输到系统的主机,以此识别附近的环境[13-14]。在传播过程中,由于红外线具有不扩散性,因此,在穿越物体时红外线的折射率通常较小,适用于远距离的检测。根据红外线的传输速度以及发射与接收之间的时间可以确定物体距离。
3)减速度传感器。其主要原理是在减速度计受振过程中,通过石英晶体或压电陶瓷产生的压电效应,获取压电元件中力的变化情况。该传感器采集的数据均为瞬时减速度数据。
系统的监测方式如下:
利用测距传感器检测防坠器的制动绳,获取实际制动距离的测距信息D′z;利用减速度传感器采集防坠器实际的防坠制动减速度s′;利用压力传感器,经信号处理和模数转换,结合式(1)获得实际的防坠制动力G′zd。将G′zd与式(6)所示的防坠制动状态阈值区间展开对比,若G′zd不在阈值区间范围内,则说明高空作业防坠器存在坠落风险,此时应发出预警。
为实现防坠预警,将红外传感器设置在防坠滑块中,获取滑块的状态及位置。如果没有检测到固定遮挡,表明防坠块的正确位置处没有安装制动绳,人员在高空作业时存在坠楼风险。钢索锁紧的检测可通过压力传感器完成,如果传感器检测到压力,防坠器此时的状态为解锁,人员在高空作业过程中处于移动状态;如果传感器没有检测到压力,防坠器此时的状态为锁定,人员在高空作业过程中处于静止状态。短时间内作业人员如果出现大幅度的位置变化,可通过三轴加速度传感器检测到人员的加速度信息,以此判断人员是否出现坠落或滑落现象。
3实验与分析
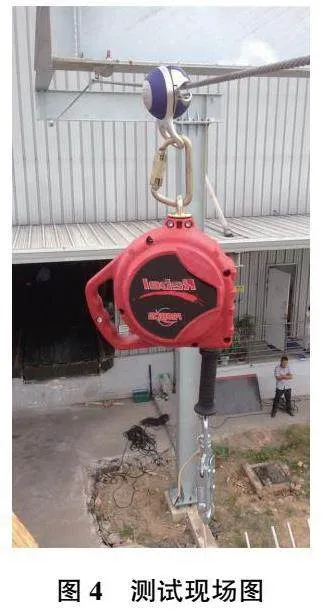
为了验证上述设计的高空作业防坠器防坠制动状态监测与预警方法的整体有效性,需要对其展开测试。本次测试的实验环境为诊断风力发电机故障展开的高空作业。
测试现场如图4所示。
防坠器参数如下:风力3级,罐笼处于水平状态;高空作业高度范围为0~55m;防坠器额定承重为300kg;最小离地间隙为50cm;锁止临界点速度为1m/s;整体破坏载荷大于9 000N;建议容纳人员2~3人(测试阶段为保证人员安全,未采用真人测试的形式,而是利用重物代替人体质量,按照成年男性平均体重69.6kg计算,罐笼承载的重物质量在0~220kg之间)。罐笼每次点动的滑动距离不能超过0.2m。
在测试过程中分为如下两种工况:
工况1,制动过程中处于空载状态(罐笼承重0kg);
工况2,制动过程中处于满载状态(罐笼承重220kg)。
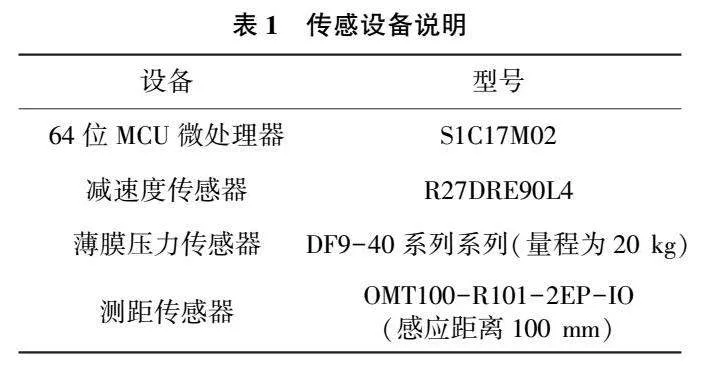
其余测试设备如表1所示。
为避免实验结果过于单一,现采用本文设计的高空作业防坠器制动状态监测与预警方法与文献[3]方法、文献[4]方法共同完成性能验证。
实验验证步骤如下:
1)在两种工况下,在罐笼发生坠落后,分别利用3种方法监测罐笼的加速度变化情况与减速度变化情况,并与实际情况相对比,验证本文方法对制动状态中速度项的监测性能;
2)在相同工况下,分别利用3种方法监测防坠器的制动载荷与制动距离,并与实际情况相对比,根据状态监测精度验证3种方法的预警精度。
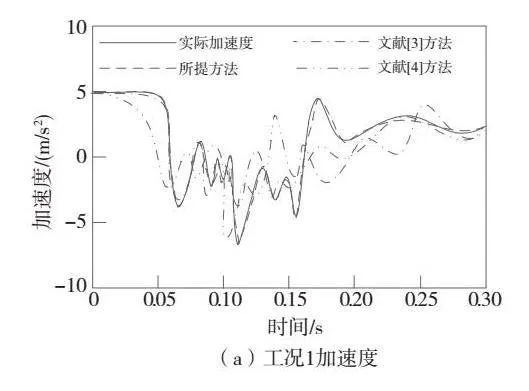
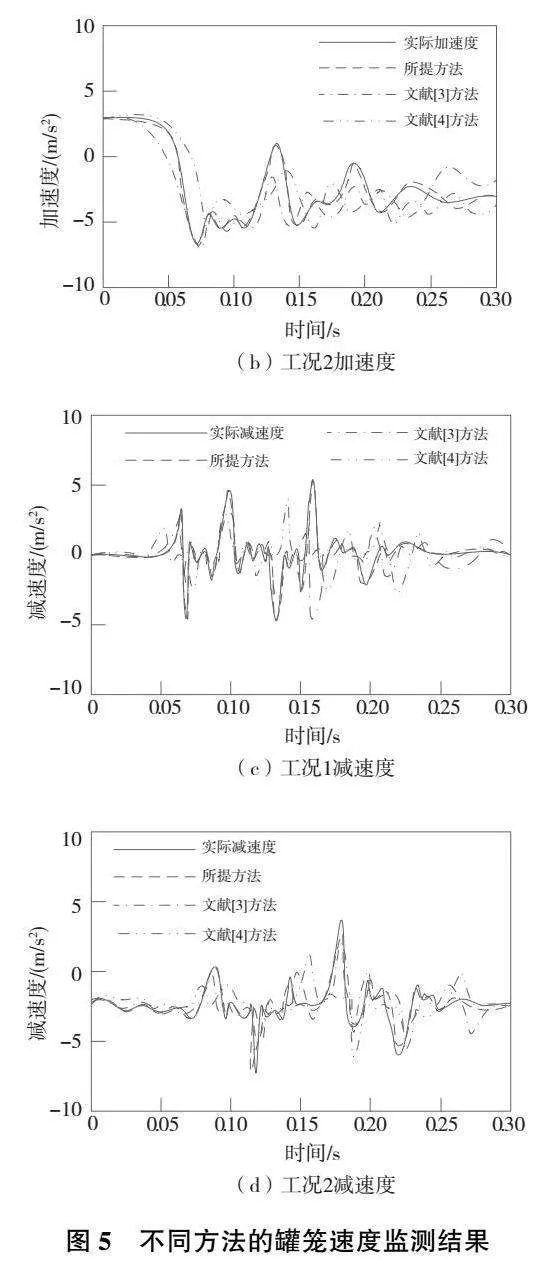
不同方法对速度项的监测结果如图5所示。
根据图5中的数据变化情况可知,罐笼在空载状态下的加速度和减速度均高于满载状态下的加速度和减速度,这表明罐笼速度的变化受罐笼质量的影响。在空载状态下,罐笼的质量小,因此加减速度较大。而在满载状态下,罐笼的质量大,因此加减速度较小。对比所提方法、文献[3]方法和文献[4]方法的速度监测结果发现,所提方法的速度变化曲线趋近于罐笼的实际速度变化曲线,文献[3]方法和文献[4]方法的速度监测曲线存在偏差,这说明所提方法具有较高的监测精度。
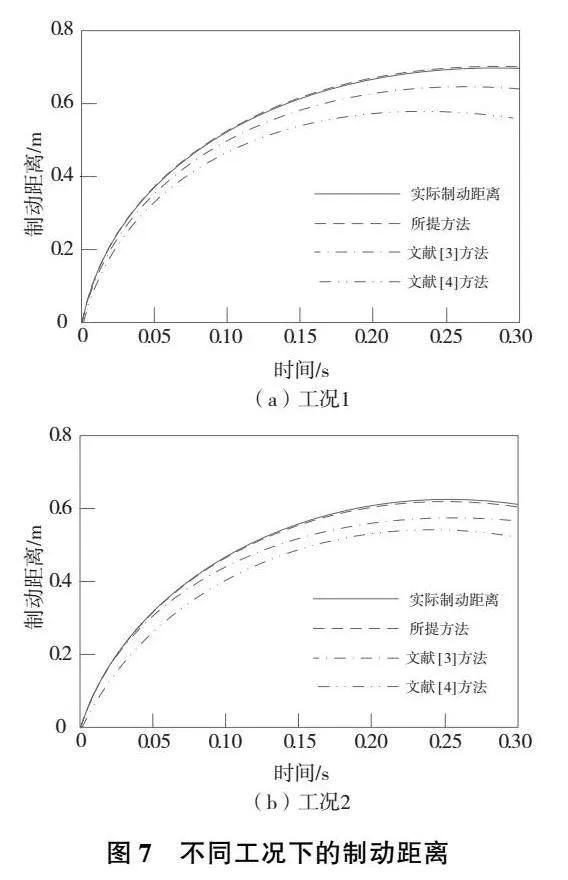
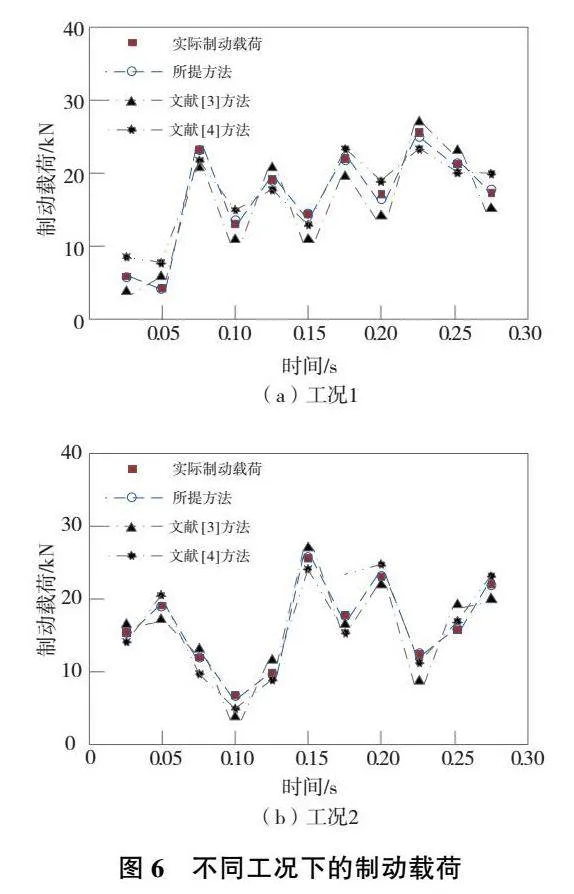
在相同工况下,采用所提方法、文献[3]方法和文献[4]方法监测防坠器的制动载荷与制动距离,根据状态监测精度验证3种方法的预警精度,监测精度越高则预警精度越高,结果如图6和图7所示。综合分析图6和图7中的数据可知,所提方法在两种工况下均可以准确地完成制动载荷和制动距离的监测,监测结果与实际结果基本相符。这是因为所提方法建立了防坠器制动绳冲击力学模型,对防坠器的制动性能展开分析,为制动状态的监测提供了数据支持,根据精准的监测数据展开后续预警,从而提高了最终的预警精度。
4结语
为了提高高空作业人员的安全性,需要监测防坠器防坠制动状态,以此实现安全预警。目前防坠状态监测预警方法难以准确地监测罐笼速度、制动距离和制动载荷,导致预警精度无法达到要求。针对这一问题,本文提出了一种高空作业防坠器防坠制动状态监测与预警方法,根据防坠器制动性能要求设计防坠制动状态监测预警系统,精准地实现状态的监测与预警。在实际应用过程中发现,该方法在监测精度和预警精度方面均表现出良好的性能。
参考文献:
[1] 郭家田,金永兴. 纯电动高空作业车操纵稳定性优化设计[J]. 中国工程机械学报,2020,18(3):253-257,263.
[2] 王豪,纪爱敏,张磊,等. 高空作业平台臂架变幅振动特性研究[J]. 振动与冲击,2020,39(8):40-46.
[3] 邵瑞影,王洪军,于晓,等. 基于AMESim的矿井罐笼常闭式液压防坠器系统特性研究[J]. 机床与液压,2022,50(1):66-69.
[4] 马天和,吴萌岭,田春. 基于黏着力观测器的列车空气制动防滑控制[J]. 同济大学学报(自然科学版),2020,48(11):1668-1675.
[5] 刘宁,王帅,胡梦凡. 基于Beam-based近场动力学模型的材料冲击响应研究[J]. 弹道学报,2020,32(1):77-82.
[6] 魏凯,周聪,徐博. 跨海桥梁高桩承台波浪冲击荷载概率模型[J]. 工程力学,2020,37(6):216-224.
[7] 白皓然,陈晓旭,马擎枭,等. 基于安卓系统和MCU智能灌溉系统设计[J]. 农机化研究,2021,43(3):146-151.
[8] 陈立军,张屹,陈孝如. 在物联网资源受限的MCU上部署深度压缩神经网络[J]. 大连工业大学学报,2022,41(2):147-156.
[9] 蒋飞宇,朱璨,俞宙,等. 一种超宽带光电混合结构A/D转换器[J]. 微电子学,2021,51(4):466-470.
[10] 李楠楠,黄正波,季惠才,等. 用于高速模数转换器的电荷泵型低抖动时钟管理电路[J]. 西安交通大学学报,2020,54(1):162-168.
[11] 刘开源,许成顺,贾科敏,等. 薄膜压力传感器(FSR)曲面土压力测量研究[J]. 岩土工程学报,2020,42(3):584-591.
[12] 皮瑶,刘惠康,李倩. 基于柔性薄膜阵列压力传感器的抱闸故障诊断[J]. 高技术通讯,2021,31(8):836-843.
[13] 张昱彤,翟旭平,聂宏. 基于低分辨率红外传感器的深度学习动作识别方法[J]. 红外技术,2022,44(3):286-293.
[14] 周翔,赵婷,张静思,等. 基于被动红外传感器的室内人行为机器学习模型[J]. 同济大学学报(自然科学版),2022,50(3):446-454.
收稿日期:20230414
第一作者简介:潘文雅(1982—),男,陕西旬邑人,工程师,本科,研究方向为新能源企业安全生产管理,zzz2022163yx@163.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.037
猜你喜欢
中华建设(2020年5期)2020-07-24 08:56:04
今日农业(2019年12期)2019-08-13 00:50:02
电子制作(2018年19期)2018-11-14 02:36:42
现代园艺(2017年22期)2018-01-19 05:07:01
设备管理与维修(2016年11期)2016-12-20 03:56:30
中国卫生(2016年12期)2016-11-23 01:10:16
工业设计(2016年6期)2016-04-17 06:42:51
工业设计(2016年6期)2016-04-17 06:42:46
建筑机械化(2015年7期)2015-01-03 08:08:58
航天返回与遥感(2014年4期)2014-07-31 17:47:41
