
基于融合波动抑制的机械零件图像智能分类算法设计
2024-12-28 00:00:00纪永
机械制造与自动化 2024年6期





摘要:为提升图像分类效果,提出双目加权模型融合波动抑制的机械零件图像分类算法。对图像进行小波分解,获取高频分量,重构处理后的分量得到去噪图像。将去噪后的图像分解为拉普拉斯金字塔序列,通过平均梯度和区域能量融合系数融合图像,引入双目加权模型完成图像重构抑制融合系数波动。采用CNN提取图像特征,使用滤波器训练特征,引入集成学习策略获取分类标签,实现图像分类。实验结果表明:所提算法的融合系数波动较小,图像分类效果较好。
关键词:双目加权模型;融合波动抑制;机械零件;图像分类;小波变换;卷积神经网络
中图分类号:TP391.41文献标志码:A文章编号:1671-5276(2024)06-0174-06
Abstract:To improve the image classification performance, a mechanical part image classification algorithm based on binocular weighted model fusion and fluctuation suppression is proposed. Wavelet decomposition on the image is performed to obtain high-frequency components, and the processed components are reconstructed to obtain a denoised image. The denoised image is decomposed into a Laplacian pyramid sequence, and by fusing the image through average gradient and regional energy fusion coefficient, a binocular weighted model is introduced to complete image reconstruction and suppress fusion coefficient fluctuations. With adoption of CNN to extract image features and filters to train features, ensemble learning strategies are introduced to gain classification labels, achieving image classification. The experimental results show that the proposed algorithm has small fluctuations in fusion coefficients and good image classification performance.
Keywords:binocular weighted model; fusion fluctuation suppression; mechanical parts; image classification; wavelet transform; convolutional neural network
0引言
高精密机械零件在工业发展领域占据十分重要的地位,现阶段正在朝着种类繁多以及微型化等方向发展[1-2]。在机械零件的生产、科研以及应用等方面,机械智能化逐渐成为发展趋势。在智能控制中,对机械零件的智能分类是一项基本基础工作,所以设计一种机械零件图像分类算法具有十分重要的意义。
现阶段,专家针对该方面的内容已进行了大量的研究。李鸣等[3]优先对卷积神经网络初始化处理,输入特征BN处理,获取归一化数据输入特征图中,采用迭代方式参数调整,实现图像分类。王鑫等[4]首先设计了一个全新的卷积神经网络,共有7层。采用网络对图像训练,得到图像的高层特征;采用主成分分析对池化层输出降维处理,后作为高层特征并将全部高层特征融合,获取图像特征,进而实现分类。
虽然现阶段上述两种算法取得了较为满意的研究成果,但上述方法应用到机械零件智能图像分类中,都是以单目立体视觉模式识别为基础,在对目标图像融合分类过程中,融合系数波动过大会导致图像分类偏差及分类丢失比例较大。
针对上述问题,本文提出一种机械零件图像分类算法,其与传统方法不同之处在于抑制图像的融合系数波动,降低机械零件图像分类的分类偏差与复杂度,根据各个图像块的相似性获取噪声在图像中分布的真实情况。通过双目加权模型机械零件图像合成对机械零件图像分类,实现图像的特征提取和分类,以期减少分类偏差,减少机械零件图像分类丢失比例。
1机械零件图像分类算法设计
1.1图像去噪
图像处理中的小波分析是目前研究的热点之一,同时小波分析也是图像预处理的一项重要手段。通过小波变换针对机械零件图像去噪处理,具体的操作步骤如下。
先从摄像机成像角度出发,将机械零件图像划分为规则相同的块,将图像结构相似性较高的图像组合在一起,构建三维数组[5-6],即分组;再通过分组操作能够有效滤除图像中的噪声。另外,联合滤波可根据各个图像块的相似性获取噪声在图像中分布的真实情况。
1)分组
图像块之间的相似性主要通过距离衡量。两个图像块之间的距离越小,说明两者的相似性越高。任意一个机械零件图像块均能够设定为参考块,结合匹配算法获取的相似块组合在一起即可形成三维数组,再计算每一个图像块之间的距离。
2)联合滤波
设定一个含有n个图像块的组,对这个组联合滤波处理,获取n个估计值,即各个块分别对应一个估计。如果机械零件的三维数据已经建立完成[7],则联合滤波的操作步骤如下:
a)对构建的图像块组线性变换;
b)通过收缩变换域的系数有效减少噪声;
c)经过逆线性变换获取不同图像块对应的估计值。
3)聚集
经过分组和滤波操作后,图像块可能会存在重叠区域,由于不同图像块之间的运行估计存在明显差异,需要对其加权处理,整个操作过程即为聚集。考虑带有噪声的机械零件图像z表示为
式中:y(x)为机械零件图像的输入节点;R为图像信息特征集;η(x)为机械零件图像的信息节点。
聚集的步骤如下:
a)对含有噪声的机械零件图像小波分解,获取对应的高低频分量;
b)图像的高频分量通过小波变换完成去噪;
c)图像的低频部分优先二次分解,同时重复步骤b)的去噪过程,直至图像中的噪声全部剔除,则停止操作;
d)采用小波逆变换逐层重构获取去噪后的机械零件图像。
1.2基于双目加权模型的图像融合系数抑制
完成机械零件图像的分类需要优先对融合系数抑制[8-9],具体的抑制过程如下:
1)采用高斯核将参与融合的机械零件图像逐步分解为图像序列;
2)将各层机械零件图像和上一层的图像作差,得到分解图像;
3)从上至下均作差,构建拉普拉斯金字塔序列。
合成图像中含有大量不同的信息,例如视差图像信息等,以下需要通过双目加权模型机械零件图像合成,即
式中:IL为机械零件的左视点图像;IR为右视点图像;ωL为机械零件图像左视点的融合系数;ωR为机械零件图像右视点的融合系数;d为视差值;x为横坐标值;y为纵坐标值。
通过加权双目模型将机械零件图像中的序列依次融合,设定GR,n为机械零件图像右视点的平均梯度,ER,m为机械零件图像右视点的区域能量,则有:
式中:M和N分别为左、右视点图像的规格;ΔIx和ΔIy分别为像素(x,y)在x和y方向上的一阶差分;μ(i,j)为区域像素值;i为特征量;j为图像的噪声节点。
结合上述操作过程,融合系数对应的计算式为:
式中:GL,n为机械零件图像左视点的平均梯度;EL,m为机械零件图像左视点的区域能量,ωR,n、ωL,n分别为机械零件图像右、左视点平均梯度对应的融合系数,取值范围为[0.4,0.6];ωR,m、ωL,m分别为机械零件图像右、左视点区域能量对应的融合系数,取值范围为[0.4,0.6]。综合上述分析,完成了机械零件图像融合系数抑制。
1.3机械零件图像分类
采用卷积神经网络对经过合成的机械零件图像特征提取[10-11]。接下来引入集成学习策略获取最终的分类标签,实现机械零件图像分类,具体操作过程如图1所示。
卷积神经网络训练是借鉴多层感知机网络实现的,主要划分为两种不同的形式,分别为前向传播和反向传播。
前向传播的具体操作步骤为:
1)通过输入层填充大小,对机械零件图像的边缘部分填充[12],获取输入张量xLi;
2)将网络中隐藏层中的全部数据初始化处理;
3)输出层第i个图像的第L层为
式中zLi为机械零件图像分布。
通过前向传播可以完成输入特征提取和分类,但是网络中参数的更新更加适合反向传播。通过两种不同的传播方式能够更加真实地反映不同标签之间的误差取值。以下主要通过链式求导解决反向传播问题。
针对前向传播到输出层形成的损失函数可以表示为
式中:σ为图像的参数融合;w为隶属度函数;b为图像的分布点数。根据链式求导法则能够获取以下的计算式:
式中:J为参数分布集;zLwL为图像残差分量。
计算网络中池化层的反向传播,池化通常使用最大池化或者平均池化,求反向传播的过程中,删除最大值,计算平均值,整个过程即为下采样过程[13-14]。经过求解获取上一层的取值,具体的计算式如下:
为了获取卷积层的δL,通过式(10)获取δL-1k,结合递推关系,获取以下形式的计算式:
式中zL和zL-1两者之间的关系可以表示为
式中:wL为L层隶属度函数;bL为L层图像的分布点数。
通过卷积神经网络,提取合成图像的主要特征,设定图像的输入为X,借助滤波器对模型优化,具体的表达式为
式中:Y为图像输出;λ为滤波系数;F为滤波器。通过卷积块后获取的特征需要采用滤波器F参数训练,以下采用岭回归对其求解,具体的计算式为
式中I为系数向量。
在上述分析的基础上,将i个滤波器集成处理,能够获取以下的表达式:
同理
针对训练集,采用优化出来的F和w需要代入式(14)中,则有
由于单一层次的特征无法更好地表征机械零件的特征,对训练集获取的类别标签以及真实的类别标签[15],需要求解两者的欧式距离,具体的计算式为
在上述分析的基础上,引入集成学习策略获取最终的分类标签,最终机械零件第i个图像的分类计算如下:
根据上述公式计算,对机械零件图像分类,实现图像的特征提取和分类[16-17]。
2实验结果与分析
为了验证所提基于双目加权模型的机械零件图像分类算法的有效性与可行性,进行实验分析。
2.1实验环境与样本采集
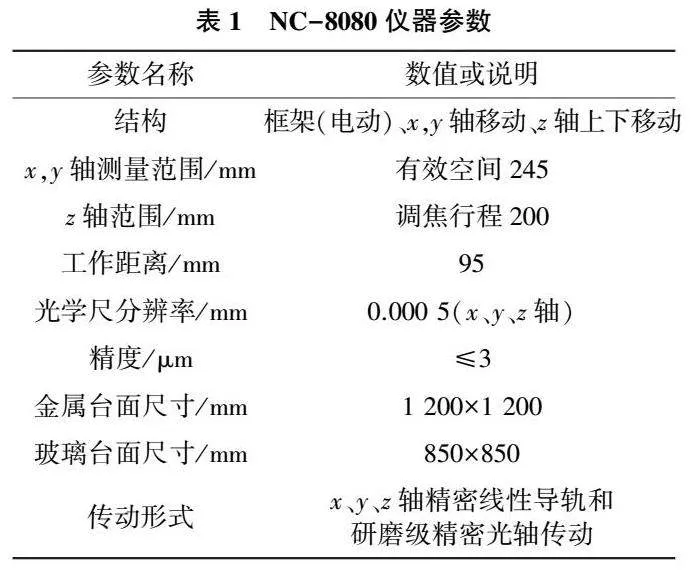
实验在系统版本为Windows10,处理器为酷睿i9-9100、内存为8G的硬件条件下进行。实验过程中选取二极管、三极管、电阻、电容等共16类常用机械零件作为测试对象,采用NC-8080半自动影像测量仪直接对实物测量获取机械零件图像,每一张图像都是同一样本在不同拍摄角度下得到的。图像采集仪器如图2所示,仪器参数如表1所示。
2.2实验流程
1)图像去噪:对采集的原始图像实施小波分解,获取高频分量并重构实现图像去噪,得到去噪后的图像。
2)特征提取:针对去噪后的机械零件图像,采用卷积神经网络提取池化层中图像的主要特征,并标记分类标签。
3)图像分类:根据分类标签对常用机械零件图像分类,得到分类结果。
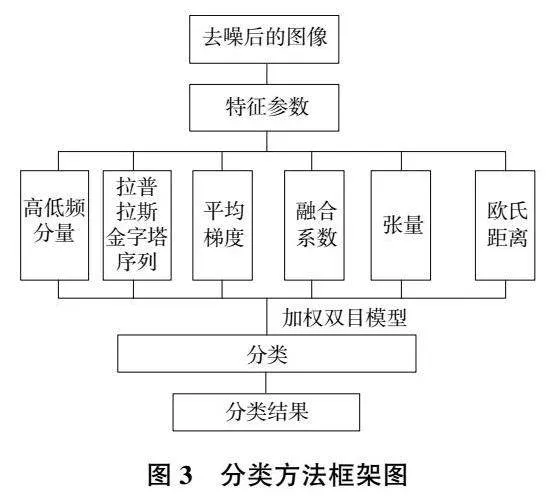
根据本文提出的双目加权模型分类算法,绘制的分类方法框架图如图3所示。
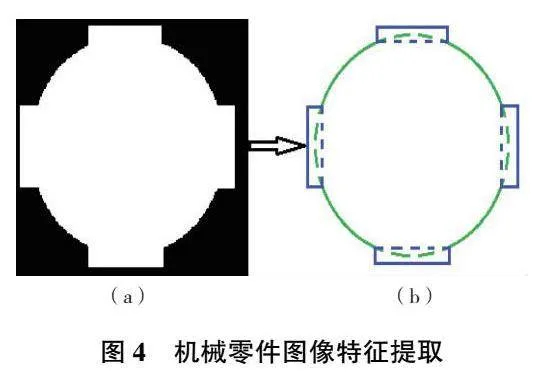
在上述实验环境与参数设置条件下,分别采用所提算法、文献[3]算法和文献[4]算法进行图像分类处理,将融合系数、分类偏差、分类复杂度以及丢失比例作为实验指标,图4—图5为机械零件图像特征提取与融合结果。
从图4—图5可以看出,本文方法能够有效提取机械零件图像特征,特征提取过程误差较小,且特征融合稳定。原因在于本文方法根据各个图像块的相似性获取噪声在图像中分布的真实情况,并通过双目加权模型合成机械零件图像对机械零件图像分类,获取现图像的特征提取和分类结果,降低了噪声干扰,有效减少了分类偏差,提升了特征提取效果。
2.3实验结果分析
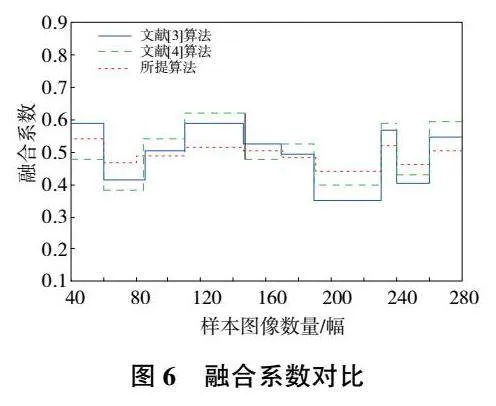
机械零件图像融合系数对比结果如图6所示。由上文可知,融合系数的取值范围为[0.4,0.6],其越接近0.5,表明算法性能越好。
分析图6中的实验数据可知,文献[3]算法的融合系数曲线波动较大,融合系数最高值达到了0.59,最低值为0.36;文献[4]算法的融合系数最高值达到了0.62,最低值为0.38。而所提算法的融合系数曲线均在取值范围内,且波动较小,最高值与最小值仅为0.55和0.47。由此可知,所提算法的融合系数更加稳定,有效提高了机械零件图像的分类效果。这是因为该算法考虑到合成图像中含有大量不同的信息,所以通过加权双目模型将机械零件图像中的序列依次融合,提升了图像融合效果。
不同算法的机械零件图像分类偏差对比结果如表2所示。
分析表2中的实验数据可知,随着图像样本数量的持续增加,文献[3]算法和文献[4]算法的分类偏差均处于直线上升趋势,在样本数为280时,分别达到了0.217%和0.302%,所提算法的分类偏差最大值仅为0.030%,与文献算法相比降低了0.187个百分点和0.272个百分点,并且所提算法的分类偏差则处于相对稳定的状态。因此,所提算法有效降低了分类偏差,证明了所提算法的优越性。
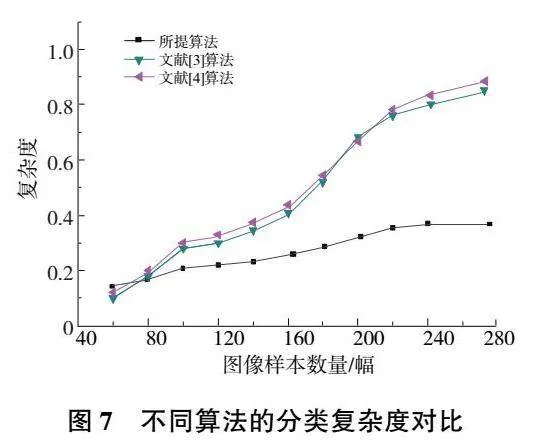
在分类的过程中,由于各个算法的操作过程不同,导致分类复杂度也存在明显的差异。以下实验测试主要对比3种不同算法的分类复杂度,具体的实验对比结果如图7所示。
分析图7中的实验数据可知,所提算法的分类复杂度曲线波动更小,并且其最大复杂度仅为0.37,文献[3]算法的最大分类复杂度为0.87,文献[4]算法的最大分类复杂度为0.91。相比另外两种算法,所提算法的分类复杂度明显更低一些,表明所提算法的图像分类效果更佳。
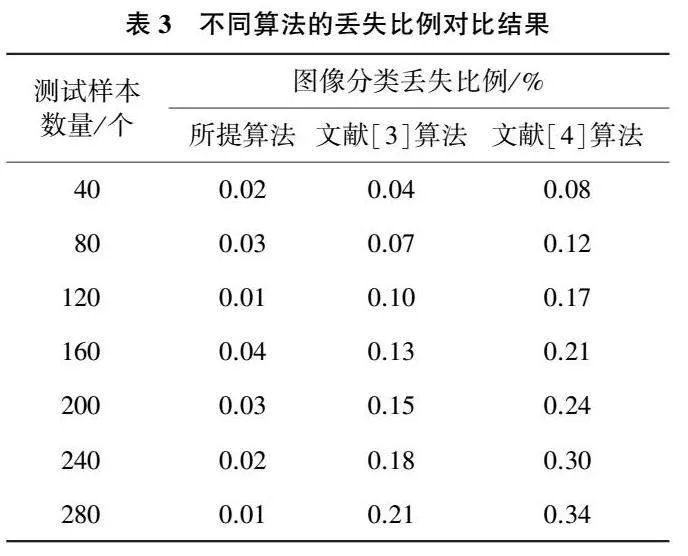
为了更加全面验证所提算法的优越性,以下实验测试重点对比3种不同算法的机械零件图像分类丢失比例,具体实验结果如表3所示。
分析表3中的实验数据可知,所提算法的图像分类丢失比例未随着样本数量的增加而增加,在测试中,最大丢失比例为0.04%,而文献算法的丢失比例均随着样本数量的增加而增大。文献[3]算法的最大丢失比例为0.21%,最小值为0.04%;文献[4]算法的最大丢失比例为0.34%,最小值为0.08%。三者相比,文献算法的最小丢失比例与所提算法的最大值相等,而随着样本数量的增加,丢失比例相差越大,最高分别差0.20个百分点和0.33个百分点。因此,说明所提算法有效降低了机械零件图像分类丢失比例。
3结语
针对传统机械零件图像分类算法存在的一系列问题,本文对基于双目加权模型的机械零件图像分类算法进行了研究。其创新之处在于利用双目加权模型抑制机械零件图像融合系数波动,通过前向传播可以完成输入特征提取和分类。实验结果表明,所提算法能够有效降低分类偏差和分类复杂度,同时减少机械零件图像分类丢失比例。但是,由于时间以及环境等因素的限制,所提算法仍然存在一定的弊端,后续将对其改进,提升整个算法的综合性能。
参考文献:
[1] 梁承权. 电子器件测试设备信息远程监控方法仿真[J]. 计算机仿真,2019,36(7):134-138.
[2] 鲍文霞,阎少梅,梁栋,等. 基于椭圆-双曲线马氏度量的图像分类算法[J]. 系统工程与电子技术,2018,40(2):456-462.
[3] 李鸣,张鸿. 基于卷积神经网络迭代优化的图像分类算法[J]. 计算机工程与设计,2017,38(1):198-202,214.
[4] 王鑫,李可,徐明君,等. 改进的基于深度学习的遥感图像分类算法[J]. 计算机应用,2019,39(2):382-387.
[5] 史静,朱虹. 多特征融合的场景图像分类算法[J]. 计算机系统应用,2018,27(5):171-175.
[6] 刘启超,肖亮,刘芳,等. SSCDenseNet:一种空-谱卷积稠密网络的高光谱图像分类算法[J]. 电子学报,2020,48(4):751-762.
[7] 许开炜,杨学志,艾加秋,等. 点特征相似与卷积神经网络相结合的SAR图像分类算法研究[J]. 地理与地理信息科学,2019,35(3):28-36.
[8] 杨红红,曲仕茹,金红霞. 基于包级空间多示例稀疏表示的图像分类算法[J]. 西北工业大学学报,2017,35(4):690-697.
[9] 赵浩如,张永,刘国柱. 基于RPN与B- CNN的细粒度图像分类算法研究[J]. 计算机应用与软件,2019,36(3):210-213,264.
[10] 齐永锋,李发勇. 基于局部保留降维卷积神经网络的高光谱图像分类算法[J]. 农业机械学报,2019,50(3):136-143.
[11] 毕晓君,周泽宇. 基于双通道GAN的高光谱图像分类算法[J]. 光学学报,2019,39(10):297-308.
[12] 姜代红,张三友,刘其开. 基于特征重标定生成对抗网络的图像分类算法[J]. 计算机应用研究,2020,37(3):932-935.
[13] 马晓丽,陆键. 基于灰度分析的路面裂缝图像分类算法研究[J]. 武汉理工大学学报(交通科学与工程版),2018,42(5):748-752,756.
[14] 王燕,曹建芳,李艳飞. 融合混合优化组合的大规模场景图像分类算法[J]. 计算机技术与发展,2019,29(9):86-91.
[15] 宋海峰,陈广胜,景维鹏,等. 基于(2D)~2PCA的受限玻尔兹曼机图像分类算法及其并行化实现[J]. 应用科学学报,2018,36(3):495-503.
[16] 吴蓉,赵敏,孙通,等. 基于深度卷积神经网络的γ光子图像分类识别研究[J]. 机械制造与自动化,2020,49(5):139-141.
[17] 洪庆,宋乔,杨晨涛,等. 基于智能视觉的机械零件图像分割技术[J]. 机械制造与自动化,2020,49(5):203-206.
收稿日期:20221102
基金项目:教育部行指委职业教育改革创新课题项目(HBKC215038)
作者简介:纪永(1977—),男,吉林松原人,副教授,硕士,研究方向为机电智能控制,liugea1234@163.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.035
猜你喜欢
科技资讯(2016年26期)2017-02-28 09:33:12
现代电子技术(2017年1期)2017-02-16 11:13:19
软件(2016年4期)2017-01-20 09:34:29
现代电子技术(2016年22期)2016-12-26 15:51:05
电脑知识与技术(2016年28期)2016-12-21 11:35:19
电脑知识与技术(2016年25期)2016-11-16 15:02:13
电子技术与软件工程(2016年18期)2016-11-14 23:59:26
软件导刊(2016年9期)2016-11-07 22:19:22
商(2016年22期)2016-07-08 14:32:30
商情(2016年11期)2016-04-15 07:39:54
