
轨道车辆检测系统点云数据仿真方法研究
2024-12-28 00:00:00张建豪梁晨锐
机械制造与自动化 2024年6期
关键词:激光雷达






摘要:激光雷达可以通过激光脉冲对目标区域进行密集采样来快速生成三维点云,三维点云数据能够有效地用于环境三维重建、障碍物检测等算法,但轨道车辆在地铁环境下,采集到符合算法要求的激光雷达数据是一项非常具有挑战性的任务,需要消耗大量人力、物力。针对以上情况,提出一种轨道车辆检测系统点云数据仿真方法,通过对地铁隧道和激光雷达传感器建模,利用激光雷达工作原理生成有向激光束,并将有向激光束通过雷达模型和隧道模型的位置关系转换到相同坐标系中,通过光线投射原理来获得仿真数据。基于该方法,对不同半径线路以及含有障碍物的工况进行数据仿真。试验结果表明:该数据仿真方法有助于轨道车辆检测系统应用激光雷达的算法开发。
关键词:激光雷达;三维点云;隧道模型;激光雷达模型;数据仿真
中图分类号:TP391.9文献标志码:B文章编号:1671-5276(2024)06-0133-05
Abstract:Although LIDAR can quickly generate 3D point clouds by densely sampling the target area with laser pulses, and 3D point cloud data can be effectively used for environmental reconstruction, obstacle detection and other algorithms, LIDAR data collecting in line with the algorithm requirements for rail vehicles in subway environments is a huge challenge requiring enormous human and material resources. To address the issue, this thesis proposes a point cloud data simulation method for rail vehicle detection systems. By modeling the subway tunnel and LIDAR sensor, directed laser beams are generated using the working principle of LIDAR, and the directed laser beams are transformed into the same coordinate system through the position relationship between the LIDAR model and the tunnel model. Simulation data is obtained through the principle of ray projection. Based on this method, data simulation for different radius lines and working conditions with obstacles are conducted, and the experimental results show that the proposed data simulation method will help the algorithm development of rail vehicle detection systems using LIDAR.
Keywords:LIDAR; 3D point cloud; tunnel model; LIDAR model; data simulation
0引言
点云是指将相关传感器静止或耦合在自主移动车辆上对目标物体或区域采集数据,并在计算机上生成精确测量数据得到处于同一坐标系下的点集。在众多3D成像系统中,激光雷达(LIDAR)[1]因其对检测环境的准确感知以及在三维空间检测的优势,不仅在地表勘测得到了大量应用,也在自动驾驶等领域引起广泛关注。但是受限于无法知道每次采集时传感器的确切位置及姿态,因此在对三维重建、点云配准、障碍物检测等算法进行验证时,并不能准确有效地分析算法的误差。同时对大环境进行实地采集数据所需要的人力、物力过高,特别是在特殊环境如轨道车辆检测系统在地铁隧道环境下的时间成本和人力成本更高,难以满足科研任务的需求。而对点云数据进行仿真研究,则可以直接获得指定参数的点云数据。此外,即使是现有传感器参数指标达不到要求,也可以对传感器的数据进行模拟。
为了得到激光雷达的仿真数据,相关学者对如何获得激光雷达仿真数据[2-5]进行了研究。王盈等[6]为了提高空间目标激光雷达成像仿真的真实性,提出了一种适用于复杂空间目标的在轨激光雷达成像仿真方法,对开展基于激光雷达非合作目标相对导航技术算法研究提供重要基础。YUE等[7]提出了一种基于计算机游戏的点云模拟框架,该框架通过设置自动驾驶场景和用户配置参数来收集点云数据,同时该数据还可以修复神经网络的盲点。微软公司也开发了一款用于自动驾驶汽车的高保真视觉和物理模拟引擎AirSim[8],可以方便地生成大量数据;并且该模拟器还允许开发算法,可以无需对算法进行修改就可移植到真实车辆上。FANG等[9]通过将障碍物和感兴趣街道点云数据进行合成,从而获得带有障碍物信息的点云数据,使仿真数据更加真实。ZHAO等[10]提出了一种几何模型和物理模型相结合的激光雷达建模方法,并对不同天气条件下激光雷达信号衰减的特征进行建模,供激光雷达用户和设计者使用。
地铁环境相对于公路环境较简单,隧道内的物体通常在短时间内不会改变,这也使得轨道车辆检测系统的点云数据仿真更加合理化。因此,本文将模拟激光雷达的采集过程。首先对传感器和地铁隧道进行建模,然后利用光线投射原理求得激光束与物体表面的交点,从而得到激光雷达的仿真数据。生成的仿真数据可用于相关算法的验证及评估,不仅为算法研究提供数据依据,而且还能提高算法验证的效率。
1坐标系建立
激光雷达在实际采集数据过程中,坐标系通常有雷达坐标系Or-xryrzr、车辆坐标系Ov-xvyvzv以及隧道坐标系Ot-xtytzt,如图1所示。
为使激光点云的仿真过程与实际采集数据一致,在数据仿真过程中也使用雷达坐标系、车辆坐标系和隧道坐标系;但由于传感器是与车辆耦合在一起的,传感器坐标系与车辆坐标系的转换只需要在算法开始时对相关参数进行初始化即可,在后续计算中雷达坐标系和车辆坐标系的位置关系是相对不变的。将激光传感器和车辆看作刚体,那么3个坐标系之间的转换就可以看作刚体之间的坐标系转换。
本文坐标系的转换用欧拉角来描述,设定隧道坐标系为整个仿真模型的基础坐标系,同时设定传感器绕z轴旋转的角度为偏航角yaw(ψ)、绕y轴旋转的角度为俯仰角pitch(θ)以及绕x轴旋转的角度为滚转角roll(),其中每个欧拉角对应的旋转矩阵分别为Rψ、Rθ、R。那么在后续数据仿真过程中求得有向激光束与隧道的交点时,就可以将有向激光束与地铁隧道模型转换到同一坐标系下,如通过旋转矩阵R和平移矩阵T可将激光坐标系下的点Pr转换到隧道坐标系下的点Pt:
2仿真模型
2.1地铁隧道模型
地铁隧道模型采用面向对象的方法进行表示,地铁隧道模型将不同的地铁隧道构件对象进行集成,每一个构件都是一个独立的对象,如隧道断面、钢轨等。同时将障碍物也作为隧道构件之一,使每个构件都能作为一个独立的部分在三维空间内表达。地铁隧道构件的参数可以根据需求选取不同的地铁隧道图纸来提取,也可以根据自身需求来添加相应的构件或障碍物。在同一环境中所有地铁隧道构件处于同一坐标系下,通过给构件添加位置约束来确定构件的空间位置,同时也根据空间中3个角度的向量来控制构件的方向。需要注意的是,构件在空间的位置是处于绝对位置。
将隧道模型看作一个对象,那么隧道模型中的构件都属于隧道的一部分,隧道断面、钢轨信息、救生平台、电源箱、障碍物等信息构成了空间中的三维隧道模型,则隧道可以表示为
式中Ci(i=1,2,…,n)为地铁隧道中的构件,其中每个构件都包含4种基本元素Ea、Eb、Ec、Ed,即
式中:Eai为构件标识;Ebi为构件结构几何信息;Eci为空间位置约束信息;Edi为相邻构件及连接形式。其中,Eai可以给仿真方法提供构件信息,选择合适的算法或者有其他需求时提高构件的辨识度;Ebi能够为算法提供构件的几何尺寸信息,其内容可以为一条也可以为多条;Eci提供了构件的空间位置约束,包含构件的6个自由度信息;Edi提供了与构件相连接的其他构件以及它们之间的连接形式。隧道模型的实例如图2所示,从图中可以看出对隧道的各个构件进行了描述,各个构件相互连接,相互作用形成了地铁隧道模型。
2.2虚拟激光雷达模型
激光雷达是一种复杂的高精度仪器,其内部有许多精密仪器组成,并且各零件之间的协作关系复杂,因此要对激光雷达内部进行建模是很困难的。同时为了使激光雷达建模方式适用于各种激光雷达,因此从应用的角度将整个激光雷达看成一个整体,通过控制激光雷达的主要参数及扫描方式来获取激光点云数据。
本文所使用的激光雷达主要参数有水平视场角、垂直视场角、扫描频率、最大探测距离、水平角分辨率、垂直角分辨率、测量精度等。根据激光雷达原理生成有向激光束,采用光线投射的方法模拟激光雷达发射有向激光束到通过物体反射回激光雷达的整个过程。光线投射是指以某点为原点向某一方向发射射线,该射线在三维空间中碰到的第一个点即为激光束所得到的三维点,定义有向激光束为
式中α和β分别为相对于激光雷达扫描线的水平角度和垂直角度。那么将激光束Ray按照雷达的角分辨率、扫描频率及扫描方式进行相应的计算即可完成对激光雷达的模拟。
根据激光雷达的工作原理[11]可知激光雷达采集的数据是以传感器自身扫描中心为原点的,因此激光坐标系Or与隧道坐标系Ot并不重合。将隧道坐标系作为绝对坐标系,激光雷达坐标系是相对于隧道坐标系运动的,任何情况下有向激光束都是从激光雷达坐标系原点出发,有向激光束与地铁隧道坐标系相交示意图如图3所示。
在仿真数据过程中,激光雷达的自身位置姿态即激光雷达的6个自由度是确定的,结合水平角度为α和垂直角度为β即可确定有向射线在雷达坐标系下的空间单位向量n(m′,n′,p′),如图4所示。
空间单位向量n的方程为:
通过坐标系转换即可将雷达坐标系下的有向射线的单位向量转换到隧道坐标系下:
式中R为雷达坐标系转换到隧道坐标系的旋转矩阵。
设Or(Xr,Yr,Zr)为激光雷达坐标系原点在隧道坐标系下的坐标,那么射出的激光束空间直线方程为
联合式(3)与式(8)进行求解交点,将一帧激光雷达数据按角分辨率、扫描方式及时间顺序求解获得,同时根据激光雷达扫描精度给予一定的数据偏差以及根据入射角度和设定物体反射率使得仿真数据存在误差及损耗即可完成对地铁运行环境下的点云数据进行仿真。
3仿真试验
为了对本文的方法进行验证,使用所提出的方法通过设置激光传感器参数、隧道模型参数来生成地铁隧道环境下的激光点云数据。考虑到地铁隧道的使用环境,对激光雷达的参数提出需求。激光传感器仿真参数如表1所示。
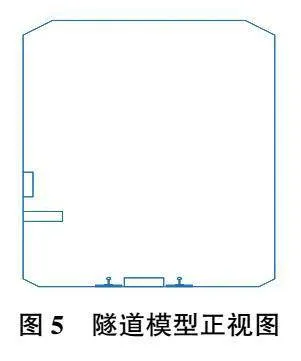
本次试验隧道模型的隧道断面采用矩形断面。为使得仿真数据更贴近于真实环境,隧道模型中的部分构件通过施工图纸获得。隧道模型的部分构件如图5所示,其中包含隧道断面、钢轨、信标、救生平台等。
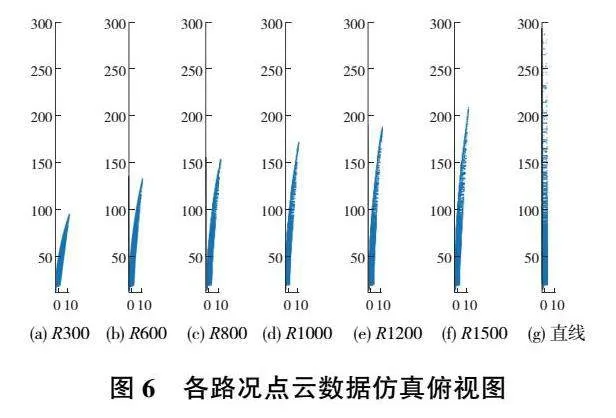
根据所提出的激光雷达数据仿真方法对直线及不同半径的点云数据进行仿真,仿真结果如图6所示。从图中可以看出:随着线路曲线半径不断减小,激光雷达在曲线路况下的探测距离是不断减小的,符合激光雷达在真实环境中的探测规律。
为了便于数据应用于障碍物检测等算法,在隧道模型中添加障碍物构件。图7展示了在直线和曲线工况下添加检测人员(障碍物)的仿真结果。
4结语
本文针对激光雷达在轨道车辆检测系统中的应用,提出了一种轨道车辆检测系统点云数据仿真方法。通过坐标系转换及对隧道和激光雷达建模,同时输入相关的系统参数,成功生成了不同半径下及含有障碍物的激光雷达仿真数据。由于开发应用于轨道车辆检测系统相关算法需要各种数据来评估算法性能,本文所提出的点云数据仿真方法能够有效地帮助开发各种激光雷达数据类型的处理算法,满足算法开发的各种需求。此外,点云数据仿真能够在传感器实际装车之前更经济、更快地获取点云数据,同时获取的点云数据质量更高,因此能够有效提高验证检测系统相关数据处理算法的效率。
参考文献:
[1] FUJII T,FUKUCHI T. Laser Remote Sensing[M]. Boca Raton:Marcel Dekker Inc,2005.
[2] LOHANI B, MISHRA R K. Generating LiDAR data in laboratory: LiDAR simulator[J]. Int. Arch. Photogramm. Remote Sens, 2007, 52(1): 264-269.
[3] 陈少扬. 多线激光雷达点云数据的模拟仿真研究[D]. 厦门:厦门大学,2020.
[4] DESCHAUD J E,PRASSER D,DIAS M F,et al. Automatic data driven vegetation modeling for lidar simulation[C]//2012IEEE International Conference on Robotics and Automation. Saint Paul,MN,USA: IEEE,2012:5030-5036.
[5] SHAN T X,WANG J K,CHEN F F,et al. Simulation-based lidar super-resolution for ground vehicles[J]. Robotics and Autonomous Systems,2020,134:103647.
[6] 王盈, 黄建明, 刘玉等. 空间目标激光雷达成像仿真技术[J]. 红外与激光工程, 2016, 45(9): 109-114.
[7] YUE X Y,WU B C,SESHIA S A,et al. A LiDAR point cloud generator:from a virtual world to autonomous driving[C]//Proceedings of the 2018ACM on International Conference on Multimedia Retrieval. Yokohama,Japan:ACM,2018:458-464.
[8] SHAH S,DEY D,LOVETT C,et al. AirSim:high-fidelity visual and physical simulation for autonomous vehicles[C]//Hutter M,Siegwart R. Field and Service Robotics. Cham:Springer,2018:621-635.
[9] FANG J,ZHOU D F,YAN F L,et al. Augmented LiDAR simulator for autonomous driving[J]. IEEE Robotics and Automation Letters,2020,5(2):1931-1938.
[10] ZHAO J,LI Y X,ZHU B,et al. Method and applications of lidar modeling for virtual testing of intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2021,22(5):2990-3000.
[11] 李现坤,李泷杲,李栋,等. 激光雷达测量精度实验分析[J]. 机械制造与自动化,2018,47(3):190-193.
收稿日期:20230420
第一作者简介:张建豪(1995—),男,河南开封人,硕士研究生,研究方向为机车车辆测控技术及故障诊断,1414989394@qq.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.026
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国交通信息化(2021年8期)2021-11-02 05:26:02
汽车观察(2021年8期)2021-09-01 10:12:41
空间科学学报(2020年6期)2020-07-21 05:36:50
甘肃科技(2020年21期)2020-04-13 00:33:38
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子测试(2018年22期)2018-12-19 05:12:08
电子制作(2018年16期)2018-09-26 03:27:00
中国交通信息化(2018年7期)2018-09-14 02:55:02
光学精密工程(2016年1期)2016-11-07 09:01:49
