
基于变刚度支承的转子系统减振策略设计与试验研究
2024-12-28 00:00:00马钰祥臧朝平金福艺
机械制造与自动化 2024年6期






摘要:为解决转子系统半主动振动控制中支承刚度变化策略设计问题,研究一种基于伪稳态响应的支承刚度变化策略优化设计方法。建立带有时变刚度支承的结构集总参数模型,利用等效线性化理论推导时变刚度支承的等效刚度与等效阻尼,结合转子系统动力学方程得到伪稳态响应表达式。在此基础上,建立以伪稳态响应为优化目标的支承刚度变化策略优化方法,通过仿真分析该方法的合理性。基于形状记忆合金建立可控刚度支承-转子系统试验器,开展振动控制试验。结果表明:转子系统经过临界转速时的响应峰值最大减振率达到49.7%,验证了基于变刚度支承的转子系统减振策略优化设计方法的有效性。
关键词:转子系统;形状记忆合金;变刚度;振动控制;试验研究
中图分类号:V231.9文献标志码:B文章编号:1671-5276(2024)06-0093-05
Abstract:To solve the design problem of support stiffness variation strategy in semi-active vibration control of rotor systems, this paper studies an optimization design method for support stiffness variation strategy based on pseudo steady-state response. A lumped parameter model of the structure with time-varying stiffness support was established, the equivalent stiffness and damping of the time-varying stiffness support were derived with the equivalent linearization theory, and the pseudo steady-state response expression was obtained by combining the dynamic equation of the rotor system. On this basis, a support stiffness change strategy optimization method with pseudo steady-state response as the optimization objective was established, and with the rationality of this method through simulation analysis, a rotor system test-bed with controllable stiffness support was established based on shape memory alloy, and vibration control experiments were conducted. The results showed that the maximum response peak vibration reduction rate of the rotor system at critical speed reached 49.7%, verifying the effectiveness of the optimization design method for vibration reduction strategy of the rotor system based on variable stiffness support.
Keywords:rotor system; shape memory alloy; variable stiffness; vibration control; experimental research
0引言
降低转子通过临界转速的振幅,一直是转子动力学领域十分关注的问题。采用半主动振动控制技术具有耗能更低、稳定性更好并且动力特性可调、潜力大等优势,在振动控制领域,半主动控制得到了广泛应用。形状记忆合金(shape memory alloy,SMA)是一种智能材料,其通过内部奥氏体相与马氏体相之间的相互作用机制及相变过程[1],可以使SMA刚度发生变化。此特性可应用于转子系统振动控制。
洪杰等[2]通过数值仿真研究了SMA用于结构振动控制的可行性。WILLIAMS等[3]利用SMA力学特性随温度变化的特点,制作了SMA变刚度弹簧,通过加热程度来调整刚度变化,提出了基于SMA的变刚度式半主动动力吸振器。任勇生等[4]研究了SMA弹簧支承对转子系统动力学稳定性的影响。目前,基于SMA支承的转子系统振动控制的研究,没有涉及对于支承刚度变化策略优化的研究。本文提出了一种基于伪稳态响应的支承刚度变化策略优化设计方法,并搭建了SMA可控刚度支承-转子系统试验器,通过试验验证了该方法的有效性。
1变刚度支承结构建模及其伪稳态响应
1.1变刚度支承结构伪稳态响应计算方法
不平衡激励下带有时变刚度支承的单自由度集总参数模型,如图1所示。该结构的质量m和阻尼c为不随时间变化的常数,刚度k(t)随时间发生变化,F为不平衡量。
系统动力学方程如式(1)所示。
在t时刻,对时变支承刚度k(t)进行一阶泰勒展开,得到
式中:k0为t时刻刚度;k·为刚度变化速率;o(t)为参数t的高阶无穷小量。
在正弦激励下,系统稳态响应如式(3)所示。
式中X是稳态下位移响应幅值。
基于等效线性化理论[5],得到时变支承刚度的等效阻尼和等效刚度分别为:
由时变支承刚度的等效阻尼和等效刚度,可得到系统的位移响应为
1.2伪稳态响应数值仿真
以图1中带有时变刚度支承的单自由度集总参数模型为研究对象,对伪稳态响应计算方法的合理性进行探究与评估。其中,m=1kg,c=0.1N·s/m,F=0.1kg·m。不平衡激励的旋转频率随时间匀加速增加,其升速率a为1rad/s2,ω=a×t,结构的时变刚度表达式如式(7)所示。
式中:kh为变刚度时刚度达到的最大值,kh=225N/mm;kl为变刚度时刚度达到的最小值,kl=155N/mm。
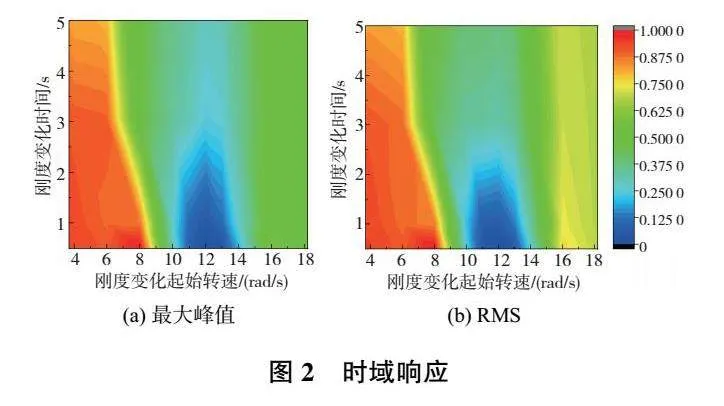
选取不同的变刚度时间Δt∈[0.5,5]、刚度变化起始转速ω0∈[3.7,18.2],ω0=t0/a,可以得到不同的刚度变化策略,并采用Newmark-β法对不同刚度变化策略下系统的60s时域响应和伪稳态响应进行了求解,其计算结果分别如图2、图3所示。图中色块代表了采用横坐标ω0、纵坐标Δt对应下时变刚度模型得到的响应,对结果进行了归一化处理(本刊为黑白印刷,如有疑问请咨询作者)。
为了评估伪稳态响应与时域响应一致性程度,本文采用结构相似性SSIM指标[6]对图2和图3进行相似性评估。SSIM值越大,表明两幅图的相似度越高,SSIM的表达式如式(8)所示。
式中:μX、 μY分别为两幅图的均值;σX、σY分别为两幅图的方差;σXY为两幅图的协方差;C1、C2、C3均为常数。
图2和图3中最大峰值、RMS对应 SSIM的计算结果分别为0.999 3、0.999 9,表明采用伪稳态计算方法得到的响应结果与瞬态计算得到的响应基本一致,伪稳态响应可以准确地反映变刚度对动力学响应带来的影响,与时域响应具有较好的一致性。
分别以时域响应最大峰值、RMS值及伪稳态响应最大峰值、RMS最小为评价指标得到的最优刚度变化起始转速ω0如表1所示。可以看出,以伪稳态响应最大峰值最小以及RMS最小得到的最优ω0与时域得到的最优值基本一致。另外,由图2可以看出,合理设计支承刚度变化策略对于提升变刚度减振方法的性能有很大的影响。
2转子系统支承变刚度策略设计方法
2.1转子系统建模
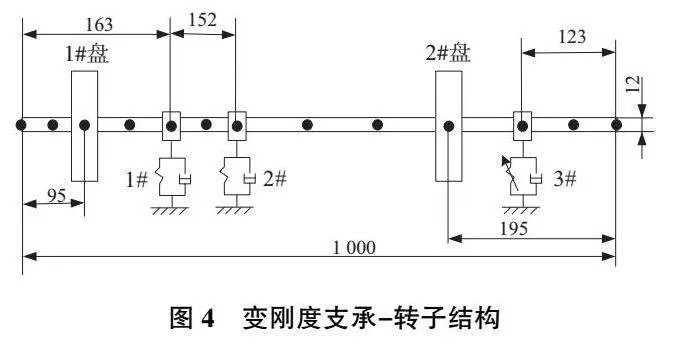
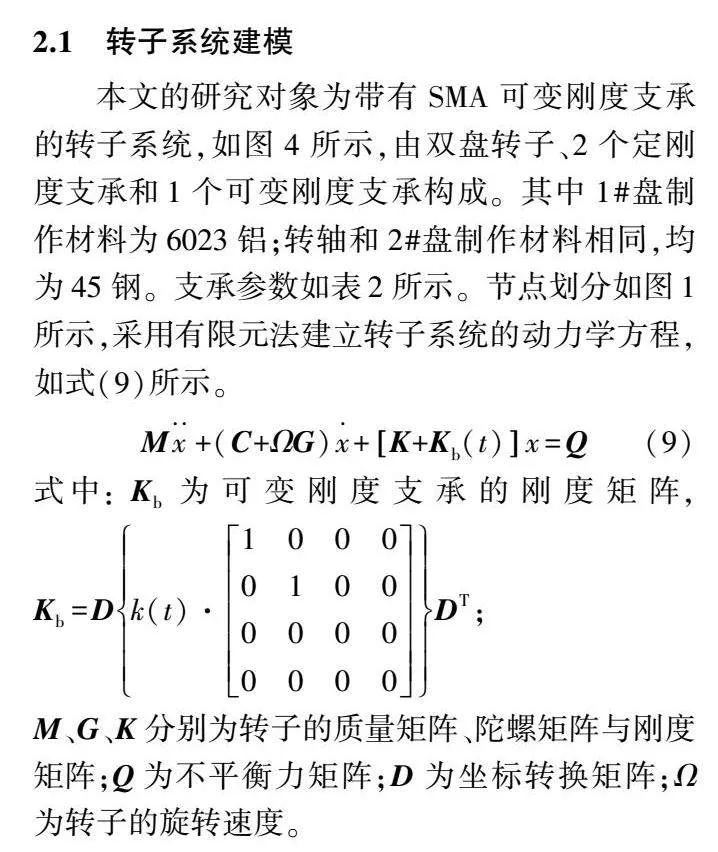
本文的研究对象为带有SMA可变刚度支承的转子系统,如图4所示,由双盘转子、2个定刚度支承和1个可变刚度支承构成。其中1#盘制作材料为6023铝;转轴和2#盘制作材料相同,均为45钢。支承参数如表2所示。节点划分如图1所示,采用有限元法建立转子系统的动力学方程,如式(9)所示。
式中:Kb为可变刚度支承的刚度矩阵,
M、G、K分别为转子的质量矩阵、陀螺矩阵与刚度矩阵;Q为不平衡力矩阵;D为坐标转换矩阵;Ω为转子的旋转速度。
2.2基于伪稳态响应的支承变刚度策略设计方法
将式(4)和式(5)代入转子系统方程,可以得到转子系统的伪稳态位移响应如下:
式中F为不平衡量矩阵。
将转速随时间的变化关系式ω(t)代入式(10),可以得到不平衡量激励下的可控刚度支承-转子系统的伪稳态位移响应与时间的关系表达式:
以转子系统伪稳态位移响应均方值最小为优化目标进行优化,可以确定最优刚度变化起始转速ω0,优化目标函数如式(12)所示。
式中:Xt为第t个时间步下的系统伪稳态响应;N为总时间步;ω*min和ω*max分别为刚度变化过程中最小刚度和最大刚度对应的临界转速。
3支承变刚度策略设计方法在SMA支承-转子系统的应用
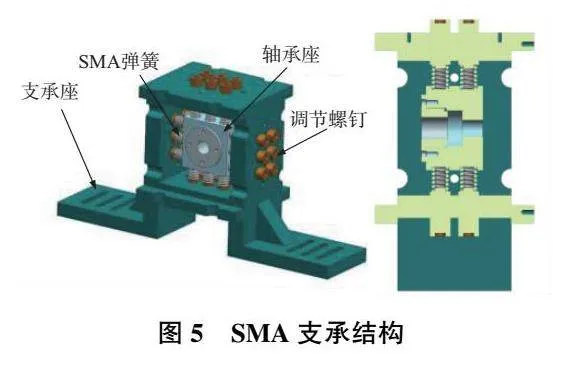
形状记忆合金(SMA)是一种由两种以上金属元素构成的材料,其可以在温度和应力作用下发生相变,从而使SMA刚度变化。本文基于SMA弹簧设计了一种SMA支承结构,其组成与内部结构如图5所示。支承座与轴承座之间通过SMA弹簧连接。在支承座与轴承座之间对称布置SMA弹簧,通过调节螺钉调节SMA弹簧的预压缩量以保证转子的同轴度。由刚度测试数据拟合,得到的SMA支承刚度随温度的变化关系如式(13)所示。
式中:KM、KA分别为SMA马氏体、奥氏体下的支承刚度;T为实测温度。
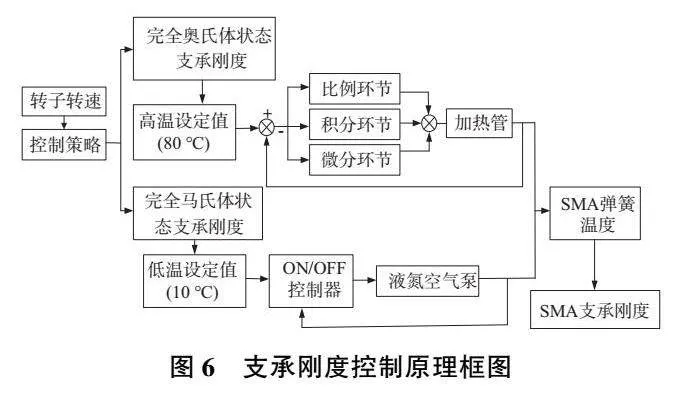
温度是驱动SMA支承刚度变化的直接因素,对SMA支承刚度的控制实质是对其温度进行调节。通过对SMA支承温度控制,可以实现对SMA支承刚度的调节。支承刚度控制系统如图6所示,主要由高温和低温控制系统两部分组成。其中,高温控制采用碳纤维加热管PID闭环控制,低温控制采用液氮空气泵ON/OFF控制。
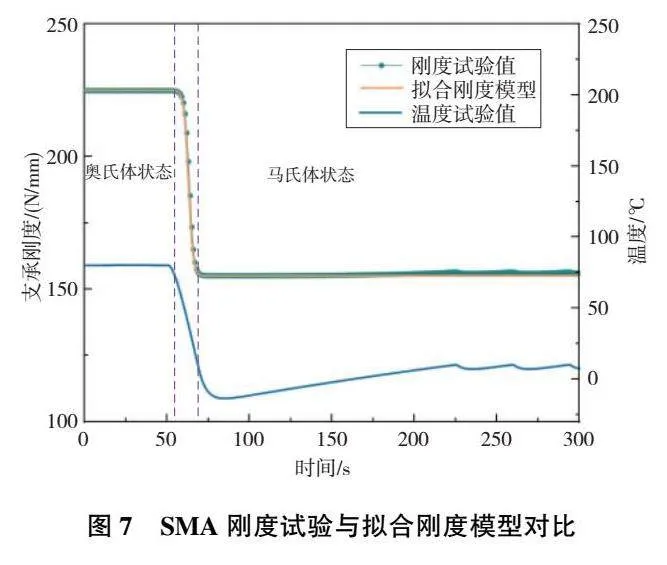
对支承进行温度控制,将温度测试结果代入式(13),可以得到支承刚度随时间的变化,结果如图7所示。可以看出,SMA支承刚度的变化分为3个阶段:1)变刚度前,利用PID控制碳纤维加热管对SMA加热,使温度在奥氏体相变结束温度以上,SMA处于完全奥氏体状态;2)当转速达到变刚度起始位置时,断开碳纤维加热管控制电路,利用ON/OFF控制液氮空气泵对SMA冷却,当温度降低至马氏体相变开始温度时,SMA开始向马氏体转变,SMA弹性模量开始下降;3)当温度降低至马氏体相变结束温度时,SMA处于完全马氏体状态,SMA弹性模量不再变化。建立SMA支承时变刚度的拟合模型如式(14)所示,拟合模型与试验的最大误差为4.08%(图7),表明拟合模型的拟合程度较好。
式中: KA=225N/mm;KM=155N/mm;Δt=9s。
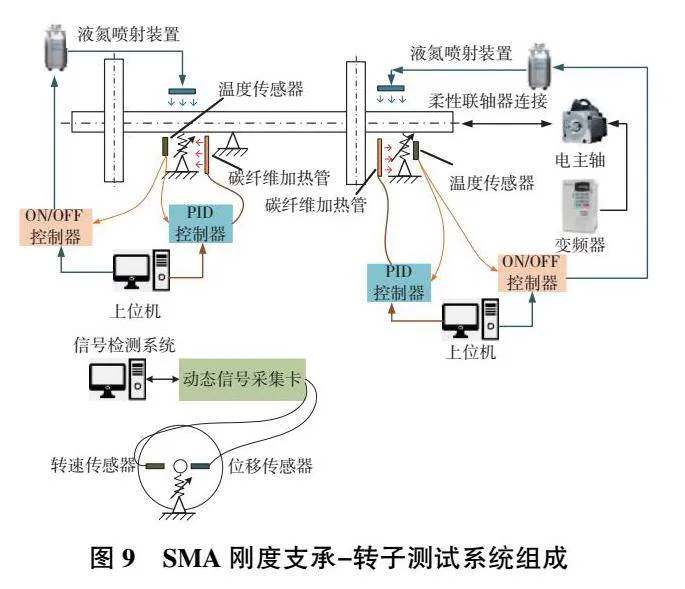
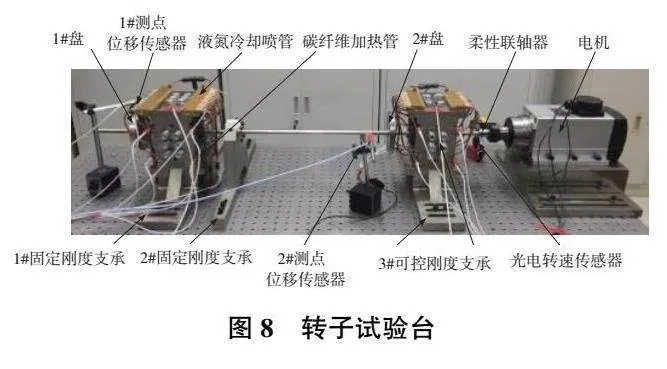
SMA支承-转子系统试验台如图8所示,由基座、变频器、电机、柔性联轴器、1个SMA可控刚度支承、2个固定刚度支承、1段光轴和2个圆盘组成;可控刚度支承上布置了用于温度控制的液氮喷射铜管和碳纤维加热管。电机通过柔性联轴器与转子相连。转子几何尺寸如图4所示,支承参数如表2所示。SMA刚度支承-转子测试系统组成如图9所示。
试验时取转子的升速率a为0.76rad/s2,对t0在[ωmin/a, ωmax /a]范围内以系统伪稳态响应RMS最小为目标进行优化,ωmin、ωmax分别为SMA支承在马氏体、奥氏体状态下转子系统的第1阶临界转速,其中,ωmin=2 568r/min;ωmax=2 678r/min,优化模型如式(12)所示。优化得到最优位置Ω=2 568r/min。
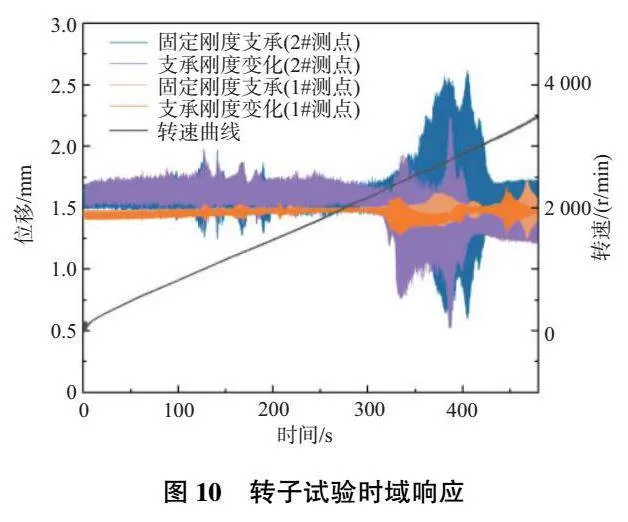
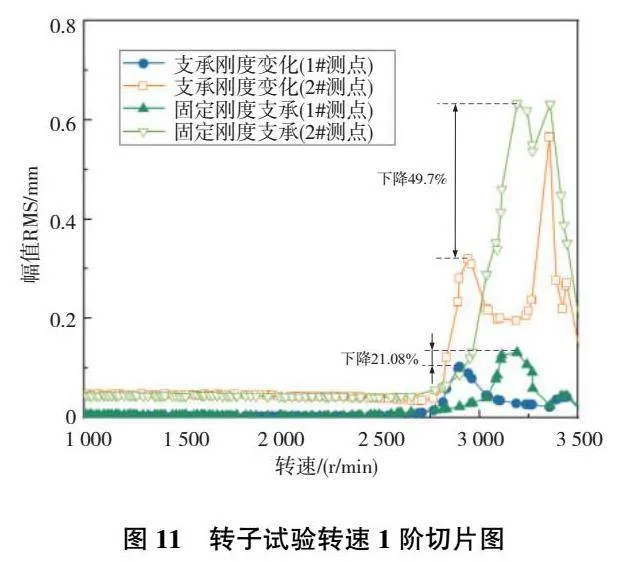
采用优化得到的支承刚度变化策略,开展转子试验。转子时域响应与转速1阶切片图分别如图10、图11所示。可以看出,与转子支承刚度为固定值时的临界响应峰值相比较,过1阶临界转速时,转子系统轴端处响应峰值下降了21.08%, 2#盘处响应峰值下降了49.7%。
4结语
针对基于变刚度支承的转子系统振动控制中支承刚度变化策略优化设计方法问题开展了研究,得到结论如下。
1)合理设计支承的刚度变化策略可以有助于提升系统的减振效果。
2)建立了一种基于伪稳态的支承变刚度策略设计方法,利用SSIM指标对时变刚度结构的伪稳态响应与时域响应进行了对比。结果表明,伪稳态响应与时域响应具有较高的一致性。
3)基于SMA支承-转子试验器开展振动控制试验。结果表明:采用变刚度策略时,转子系统过1阶临界转速时轴端处响应峰值下降了21.08%, 2#盘处响应峰值下降了49.7%。
参考文献:
[1] CISSE C,ZAKI W,BEN ZINEB T. A review of constitutive models and modeling techniques for shape memory alloys[J]. International Journal of Plasticity,2016,76:244-284.
[2] 杨鑫,洪杰,马艳红,等. SMA智能梁结构振动控制试验研究[J]. 航空学报,2015,36(7):2251-2259.
[3] WILLIAMS K A,CHIU G T C,BERNHARD R J. Dynamic modelling of a shape memory alloy adaptive tuned vibration absorber[J]. Journal of Sound and Vibration,2005,280(1/2):211-234.
[4] 任勇生,杜成刚,刘养航. 具有形状记忆合金弹簧支承的转子系统的动力稳定性研究[J]. 振动与冲击,2016,35(5):70-74.
[5] 杨稀,臧朝平,周标,等. 基于恒位移测试的转子系统非线性支承刚度参数辨识研究[J]. 机械制造与自动化,2019,48(5):29-33.
[6] 杨紫骞,王艳秋,郑福,等. 多维点云结构相似性定量化评价[J]. 光学 精密工程,2023,31(4):533-542.
收稿日期:20230330
第一作者简介:马钰祥(1998—),男,湖南长沙人,硕士研究生,研究方向为转子振动控制,769264605@qq.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.018
猜你喜欢
中国新技术新产品(2017年6期)2017-03-20 22:48:27
湖南大学学报·自然科学版(2016年11期)2017-02-20 20:27:40
建筑科学与工程学报(2016年6期)2017-01-18 15:33:40
汽车工程学报(2016年6期)2017-01-11 17:40:15
价值工程(2016年36期)2017-01-11 09:29:32
南水北调与水利科技(2016年6期)2017-01-06 13:31:08
价值工程(2016年31期)2016-12-03 23:45:30
科技与创新(2016年18期)2016-11-04 10:48:35
科技视界(2016年12期)2016-05-25 00:40:52
科技视界(2016年1期)2016-03-30 11:55:29
