
可移动坐卧两用半失能老人护理床设计
2024-12-27 00:00:00凌晨伟张民杰王语哲杜雷张子园
中国新技术新产品 2024年18期
摘 要:本文针对半失能老人的护理需求和自主参与日常活动的心理诉求,设计了一款多功能护理床,采用床椅一体化结构,搭载多种类型的传感器和微控制器,除满足日常护理需求外,还能帮助老人完成更多的自主活动。该护理床搭配伸缩推杆和基于ROS(Robot Operating System)的机器人移动底盘,多端可控,在安全的前提下为老人提供尽可能多的操作空间,并使用JACK软件的人因工程仿真和实物控制检验。该护理床具有安全性和舒适性,可满足半失能老人的使用需求。
关键词:智能护理床;半失能老人;智能化控制;ROS
中图分类号:TH 122" " " " 文献标志码:A
我国人口老龄化现象正从深度老龄化迈向超级老龄化,随着老龄化程度持续上升,失能、半失能老人数量不断增加,与之对应的护理服务需求激增,全社会面临前所未有的压力[1]。护理床是老年人护理的关键保障设备之一,其更新发展刻不容缓。
目前,在护理床的使用人群中,半失能老人比失能老人人数占比更多且具有一定的身体自控能力,有比较强的独立自主参与日常活动的心理诉求[2]。而现阶段的护理床几乎都是针对失能老人设计的,很难找到针对半失能老人设计的护理床[3],面向半失能老人护理床方面的研究方兴未艾。本文针对半失能老人的生理需要和心理诉求,设计了一种适用半失能老人的可移动坐卧两用多功能护理床。该护理床以移动机器人为底盘,采用床椅一体化设计,既满足半失能老人的实用需求、保障其安全,也能有效降低家属的护理劳动强度。该型护理床结合人工智能、物联网和智能硬件等技术,具有较好的社会效益和市场推广价值[4]。
1 总体结构设计
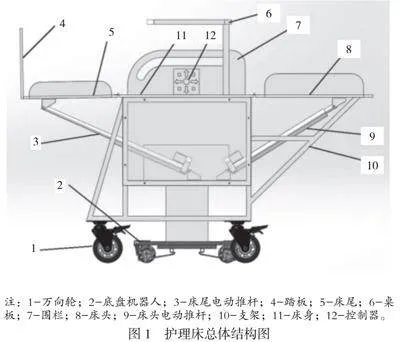
综合考虑人体工程学原理,可移动坐卧两用护理床总体设计方案如图1所示。床体根据人体结构分为4个部分,即床头部分(8)、床身部分(11),床尾部分(5)和踏板(4),并辅以周边挡板,保障使用安全。为保证老人在使用过程中的舒适度,该护理床采用床头、床身和床尾三段式设计,每一段均可独立调节。该结构符合人体的自然曲线,能提供更舒适的支撑,尤其是在长时间使用的情况下,能够有效减少压力点和不适感。
在图1所示的总体结构设计方案中,针对半失能老人的特殊护理需求,床体采用坐卧两用的可变换设计,能够实现从坐姿到卧姿的无障碍转换。床头部分可辅助老人起身、平躺和倚靠,床尾部分可支撑身体和辅助下床。为保证坐姿的稳定性,该护理床设计了放脚踏板。为避免单根推杆推动受力不均的问题,由2个电动伸缩推杆(构件3与9,共4个)分别连接床体的5号板和8号板,推动5号、8号板完成坐、卧姿态的变换。
在坐姿状态下,床头部分(构件8)上升,为老人提供充分的背部支撑,保证老人能稳定、舒适地坐立。床身部分(构件11)保持水平,提供躯干和下肢的坚实承托。床尾部分(构件5)适度上升,以支撑双腿并防止滑动,踏板(构件4)在此状态下增强了坐姿的稳定性与安全性。在躺姿状态下,床头部分(构件8)逐步放平,床身部分(构件11)与床尾部分(构件5)根据人体自然曲线展开,形成一个平坦的睡眠表面,提供全身均匀的支撑和舒适感。电动伸缩推杆的精确调节机制与限位开关的使用能保证状态转换过程中的平稳与无障碍,实现无缝过渡。这一设计不仅优化了老人在不同状态下的舒适度,还便于护理人员根据具体需求进行灵活调整,从而显著提高护理效率与安全性。
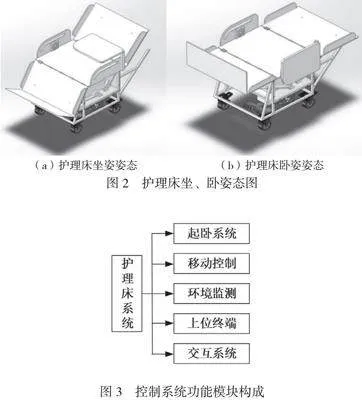
图1中的桌板(构件6)可满足老人的日常使用,例如进食、阅读和使用其他设备等,同时床身下方平台用于置物。推杆、底盘机器人、控制器组成了护理床的运动结构,可利用手机App控制床体的移动。轮子采用麦克纳姆轮,可以自由转向,老人在护理床上由卧姿变换为坐姿时,可以操纵护理床快捷地移动。坐、卧姿态如图2所示。
2 控制系统设计
可移动坐卧两用护理床的控制系统综合使用物联网、传感器和无线通信等技术,主要进行护理床姿态控制、移动底盘的平稳移动、环境与体征的监测以及与终端系统使用交互,其功能模块如图3所示。
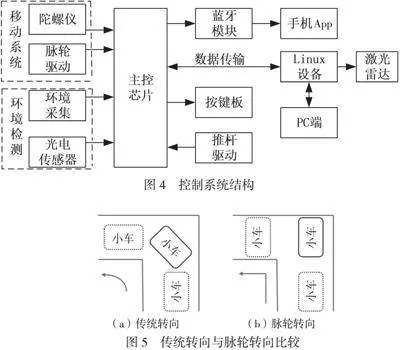
护理床控制系统架构如图4所示。系统核心为主控芯片,该芯片接收来自手机App、按键板和PC端的指令。在传感器获取信息的辅助下,能够精准控制床体的姿态变换和移动。
环境监测模块采用DHT11温湿度采集芯片。该芯片将采集的模拟数据进行校正和滤波,再发送到主控芯片的模拟引脚上,经A/D转换为数字值。这些数字值由主控STM32芯片发送至PC端。系统还集成了光电测距传感器,用于实时检测周边空间,保证床体在伸展过程中不会与周围物体发生碰撞。传感器检测到的距离数据会转化为高、低电平信号,由主控芯片判断是否符合伸展的空间要求。这一机制增加了床体操作的安全性,可防止潜在的碰撞事故。
移动控制模块将4个麦克纳姆轮(脉轮)作为主轮,辅以4个万向轮增强支撑结构。与传统差速转弯相比,这种轮式结构具有多个优势,其紧凑的设计适合于空间限制大的场所,能够实现原地旋转,具有更自由的转向能力,可保证床体在狭窄且转弯频繁的环境中能够灵活移动,结合比例-积分-微分(PID)[5-6]控制策略,该系统能够在运行过程中达到最大的稳定性。该转向系统在复杂环境中的优越性能如图5所示。
护理床的起卧功能由2组成对的电动推杆实现,头尾两端独立控制,允许使用者调节至个人感觉最舒适的位置。电动推杆的控制基于TB6600驱动器和STM32控制板的协同作用。在工作环境下,TB6600驱动器将STM32控制板输出的脉冲信号转换为电动推杆所需的精确驱动力,在共阴极接法下,系统更稳定,兼容性更好。利用STM32控制板对TB6600驱动器输出的信号进行控制,从而准确控制电动推杆的速度、运行方向和位置。推杆限位控制的引入可保证推杆在运动过程中不超出预设范围。
系统的控制优先级依次为PC端、APP和按键板。按键板的中心按键具有自锁功能,以防止误操作。移动设备端可以利用蓝牙连接并使用App将控制指令发送至主控芯片,从而远程操控护理床,满足家属或护理人员的远程控制需求[7]。
在实际使用中,App与按键控制均采用长按式控制方式,按下与松开可分别发送2个不同的指令,以进行精确控制。当按下按键时,系统会接收并处理一个初始控制指令,激活相应的功能模块。保持按住状态可持续发送该指令,使系统维持激活状态,并在满足运动的条件下进行预定操作。当松开按键时,系统会接收并处理一个终止指令,停止当前操作并返回初始状态。
本文在设计中还引入了ROS(Robot Operating System)。ROS采用Linux设备进行搭载,可与主控芯片相互通信。ROS提升了护理床的智能性和自主性,能为老人提供更好的服务,其主要技术优势体现在以下3个方面。1) 定位与避障。激光雷达用于收集周边环境的信息,以点云形式传输数据,达到使机器识别周围环境的目的。在该基础上,搭配SLAM(Simultaneous Localization and Mapping)算法,确定自身位置,并自主导航到指定位置,避免障碍物的碰撞[8]。2) 远程控制与检测。基于ROS的护理床可以连接手机App或电脑端,进行远程控制和监控功能。家属或护理人员可以通过App远程控制床的姿态调整,监测老人的实时状态和生理参数,及时了解老人的周身状况。3) 功能拓展。ROS支持更多交互功能,例如查询天气、播放语音等,并能结合机器学习和数据分析技术,分析收集的信息,提供个性化的护理建议和健康管理。
3 试验仿真
为保证该护理床设计满足半失能老人的具体需求,本文采用JACK软件进行人体工程学分析。相关研究指出,半失能老人常因长期受力导致第四腰椎(L4)与第五腰椎(L5)受损,进而引发腰腹和下肢疼痛等问题[9]。因此,分析的重点为模拟病患的下背部受力情况。
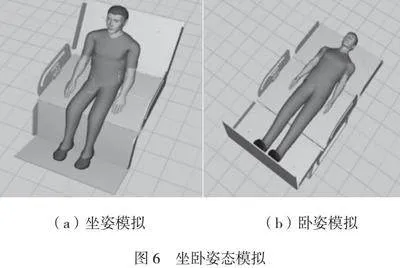
在分析过程中,选取一名成年男性(身高176cm,体重78kg)作为仿真对象,主要考察护理床在不同姿态下对人体下背部的支撑效果。采用模拟分析,详细观察并评估护理床对关键脊椎区域的支持和压力分布,保证护理床能够为半失能老人提供必要的支持,减少长期卧床带来的不适和潜在健康风险。仿真对象在护理床上的具体姿态如图6所示。
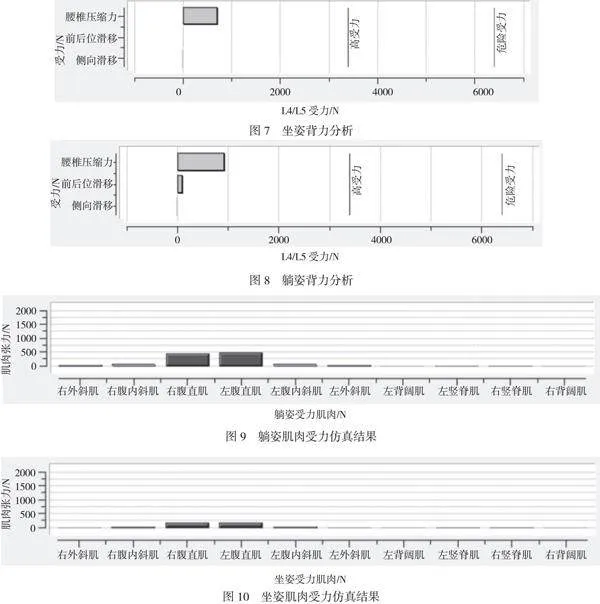
坐姿和躺姿下L4和L5腰椎的具体受力情况分别如图7、图8所示。分析结果显示,在这2种姿态下,腰椎承受的压缩力为700N~900N,同时伴随的滑移力相对较小,远低于美国国家职业安全卫生研究所(NIOSH)规定的安全标准值。
肌肉受力仿真结果分别如图9、图10所示。仿真结果指出,无论是平躺还是静坐状态,腹部尤其是腹直肌是主要的受力部位。躺姿时腹直肌的受力可达近500N,这种力量水平可能导致使用者有疲劳感。因此,尽管该护理床的机械结构设计基本上满足了人体工程学要求,但是在长期使用的舒适性方面还存在改进空间。为了减轻腹部受力带来的不适和疲劳,本文在护理床床身的设计中加入可额外的垫材,以提供更好的支持和减震效果[10]。
4 结论
智能护理床综合应用多种技术,显著降低了护理人员的工作强度,缓解了失能老人卧床时的心理压力。本文针对半失能老人的日常生活需求和基本护理需求,设计了一种床椅一体化的智能护理床,兼具移动、监测和使用者自主控制的特点。利用物联网技术实现了信息采集和实时可视化,同时具备灵活的移动系统、安全的多传感器判断以及多端控制功能。样机表现出稳定的结构和良好的控制效果。该护理床在使用上符合预期标准,满足设计目标。
参考文献
[1]李建伟,吉文桥,钱诚.我国人口深度老龄化与老年照护服务需求发展趋势[J].改革,2022(2):1-21.
[2]肖璐瑶,邹心怡,张彤,等.老龄化背景下失能半失能老人养护模式的可持续发展问题——以湖北省荆门市为例[J].国际公关,2022(15):19-21.
[3]刘杰,朱凌云,苟向锋.多功能护理床发展现状与趋势[J].医疗卫生装备,2019,40(7):94-98,103.
[4]谭海亮.基于“互联网+”的轮椅护理床智能监控系统研究[D].广州:华南理工大学,2021.
[5]陈元威.基于PID算法的平衡车控制系统研究[J].仪表技术,2024(1):64-65,82.
[6]田文奇.室内移动机器人底盘控制技术及应用情景探究[J].信息与电脑,2021,33(12):26-28.
[7]郭文源.基于Web端的多功能护理床健康监护系统开发[D].南昌:南昌大学,2021.
[8]方育鑫,林盛鑫,史礼帆,等.基于ROS和视觉SLAM的室内导航机器人研究[J].东莞理工学院学报,2024,31(1):59-64.
[9]黄楚云,杜雷,王庆礼,等.多功能智能护理床设计与人因功效分析[J].中国医疗设备,2020,35(1):34-38.
[10]赵芳华,孙惠东,关玉明.基于JACK虚拟仿真分析的介助老人护理床人机工程学设计[J].包装工程,2020,41(24):30-39.
通信作者:杜雷(1966-),男,河南周口市人,博士研究生,副教授,研究方向为机械设计、CAD/CAM。
电子邮箱:408787189@qq.com。
基金项目:浙江省国家级创新训练项目“半失能老人多功能护理床开发”(项目编号:202110350044)。
