
基于遗传算法的无人驾驶卡车路径跟踪控制研究
2024-12-14 00:00:00张涛赵奉奎张涌高峰吕立亚李冰林
南京信息工程大学学报 2024年6期























摘要路径跟踪在无人驾驶中起着至关重要的作用.为提高无人驾驶卡车在不同车速下路径跟踪的精度与稳定性,设计了一种基于改进遗传算法优化的线性二次调节器(LQR)进行路径跟踪.首先,基于自然坐标系建立车辆二自由度动力学模型和跟踪误差模型,并设计LQR控制器,采用前馈控制消除稳态误差,提高跟踪精度;其次,通过改进遗传算法对LQR的权重矩阵进行优化,以提高路径跟踪的精度与稳定性;最后,通过Matlab/Simulink-TruckSim联合仿真平台在不同工况下对所设计的LQR控制器控制效果进行仿真验证.结果表明,在双移线工况下,GA(遗传算法)优化后的LQR控制器在30 km/h和60 km/h跟踪精度分别提高了约68.5%和49.4%;在U形工况下,跟踪精度分别提高了约12.0%和25.5%,且具有更高的稳定性,位置误差和航向误差分别可控制在0.17 m和0.11 rad以内,证明了所提出的跟踪控制框架的有效性.
关键词无人驾驶卡车;路径跟踪;LQR控制器;改进遗传算法
中图分类号U463.6;TP18
文献标志码A
0 引言
全球贸易量的持续增长引发了物流和运输行业中卡车司机的短缺问题,这一现象在美国、英国、德国、中国、日本、印度和巴西等国家尤为严重[1].因此,无人驾驶卡车[2]技术现已被视为相关国家解决卡车司机短缺问题的重要方式之一.作为无人驾驶的基础和重要模块,路径跟踪控制旨在确保车辆尽可能接近预定路线,最小化横向误差和航向偏差.因此,解决路径跟踪控制器的追踪精确度和稳定性问题至关重要.
路径跟踪的主要任务是得出合适的前轮转向角并达到预定义的目标,以确保横向位移误差尽快趋于零.无人驾驶车辆路径跟踪控制方法通常可以分为三类:基于几何模型的控制、无模型智能控制和基于运动学及动力学模型的控制.基于几何模型的控制方法主要有纯追踪(pure pursuit)[3]和Stanley方法[4],因其简单、性能好而被广泛应用于处理车辆或机器人的路径跟踪问题,但几何方法仅适用于忽略动力特性的车辆.无模型智能控制主要有基于模糊规则的控制[5]、基于神经网络的控制[6]和基于强化学习的控制[7],虽然它们具有强自适应性以及鲁棒性的特点,但需要耗费大量时间与计算资源,还存在难以证明稳定性的缺点.基于运动学及动力学模型的路径跟踪方法更适合真实驾驶场景下的无人驾驶汽车,如PID控制[8]、模型预测控制(MPC)[9]、Fuzzy逻辑控制[10]、滑模控制(SMC)[11]和LQR控制[12].其中,LQR(Linear Quadratic Regulator,线性二次调节器)控制是基于最优化原理设计的反馈控制方法[13].由于LQR控制具有精度高、算法简单、适用于非线性系统和能够考虑动态约束等特点被广泛应用于无人驾驶车辆路径跟踪中.Kapania等[14]提出一种前馈+反馈转向控制器,在高速状态下,该控制器表现出稳态路径偏差显著增加的趋势.Xu等[15]在LQR反馈控制的基础上增加一个路面曲率前馈环节来消除横向位移的稳态误差.王柏林等[16]设计了一种基于蚁狮算法(ALO)优化的带有预瞄前馈转角补偿的自适应权重系数LQR控制器,该控制器能够适应大曲率参考路径,并兼顾路径跟踪精准性和行驶稳定性.胡杰等[17]提出一种带有预瞄PID转角补偿的LQR控制器,该控制器具有较高的跟踪精度,且在不同车速下均能保持良好的精确性与稳定性.LQR控制器在车辆行驶过程中出现偏航时,可以保证无人驾驶车辆跟踪控制系统能够接近平衡状态,而不会消耗太多能量.基于LQR控制方法的研究已经在智能车辆中得到了广泛应用,但控制精度和稳定性仍有进一步提升的空间.
为了提高控制器的跟踪精度和稳定性,本文提出一种基于改进遗传算法优化的LQR控制器,并加入预测控制增加车辆的预见性.首先,在2自由度车辆动力学横向跟踪误差模型的基础上,设计LQR控制器,并基于此模型采取前馈控制补偿消除模型的稳态误差.其次,分析LQR控制器权重矩阵对车辆跟踪能力的影响,采用改进的遗传算法对LQR的权重矩阵进行优化,以保证车辆在控制稳定性和跟踪精确性上的平衡.最后,对优化前后的LQR控制器进行仿真试验,结果表明,优化后的LQR控制器性能更优.
1 车辆路径跟踪控制模型
1.1 车辆动力学模型
为尽可能降低控制器设计中车辆模型的复杂性,以便于理论分析,需要对无人驾驶卡车作出以下假设:
1)忽略横、纵向空气动力学影响;
2)假定车辆仅做平面运动,不考虑悬架系统的影响;
3)只考虑轮胎侧偏特性,即轮胎受到的侧偏力与侧偏角成线性关系;
4)忽略转向系统的影响,直接以前轮转角作为输入;
5)忽略前后轴的载荷转移.
基于以上假设,无人驾驶卡车只有沿x轴的侧向运动与绕z轴的横摆运动2个自由度,与之对应的线性模型如图1所示,其中,Oxy为车辆坐标系.
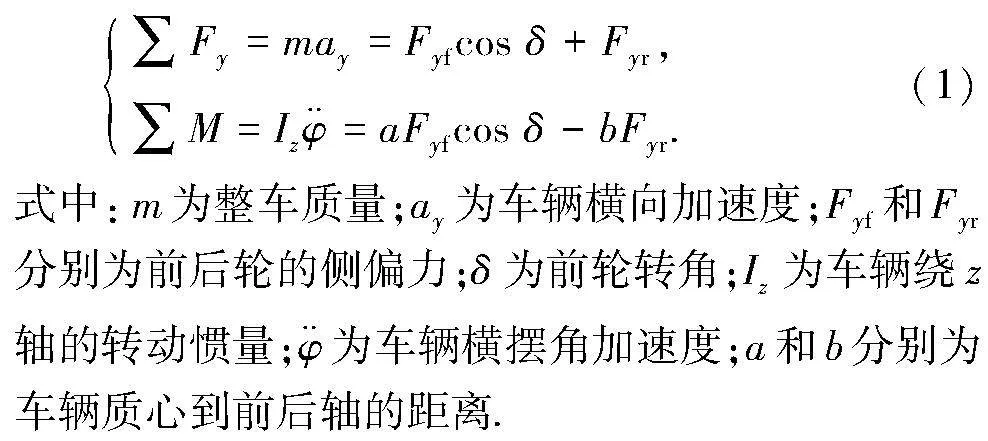
对图1所示动力学模型进行受力分析,可得车辆动力学方程:
假设车辆匀速行驶,且前轮转角δ较小,即cos δ=1,式(1)可被简化为
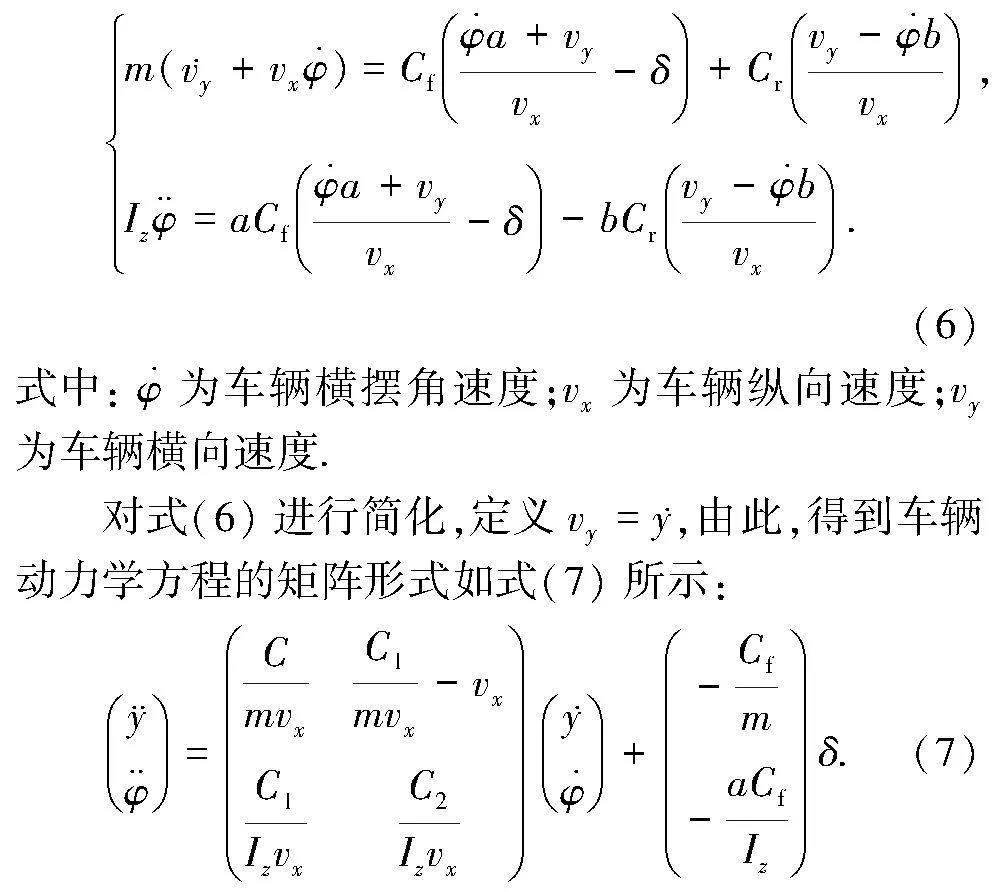
式中:Cf和Cr分别为前轮侧偏刚度和后轮侧偏刚度.
汽车质心绝对加速度沿横轴Oy上的分量,即车辆横向加速度为
前后轮侧偏角分别如式(4)和(5)所示:
将式(3)、(4)、(5)代入式(2),得到新的车辆动力学方程如式(6)所示:
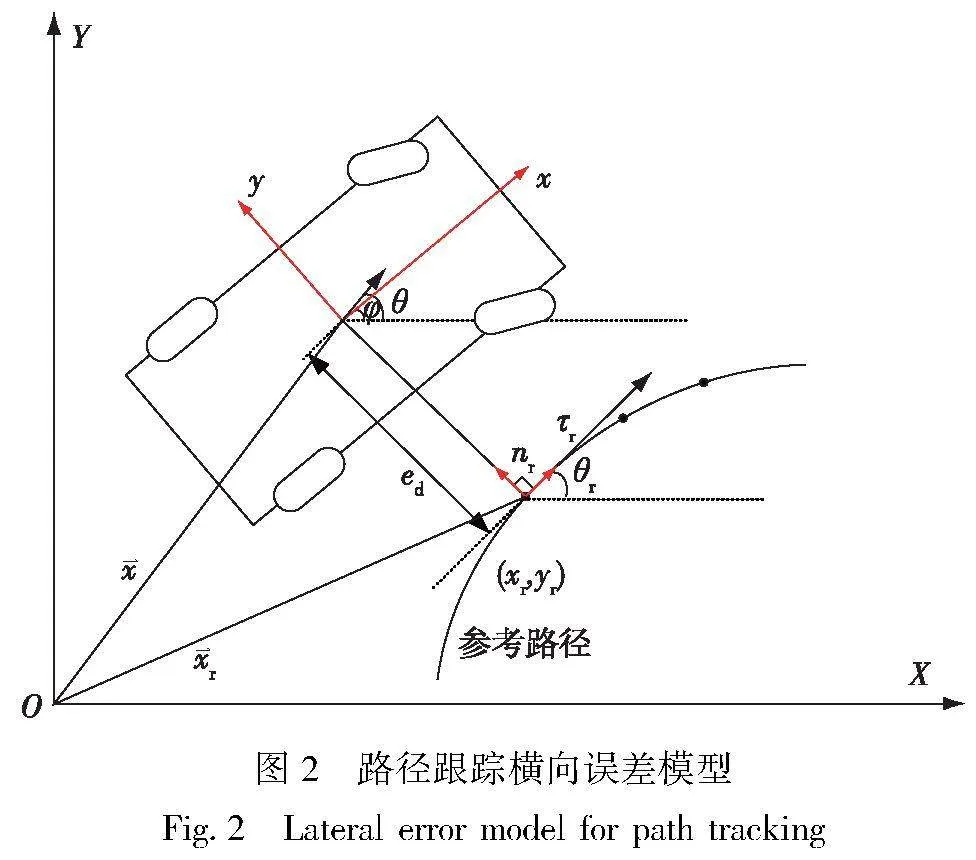
1.2 车辆路径跟踪误差模型
为了实现车辆横向和纵向控制的解耦,将车辆的动力学模型转换到Frenet坐标系,并使用横向误差和航向误差作为动态误差模型的状态变量,得到车辆路径跟踪误差模型,如图2所示.定义车辆质心到参考路径投影点之间的最短距离为横向误差ed,车辆实际航向角θ与参考航向角θr之差为航向角误差eφ.在实际控制中,要求设计控制器实时消除这两个误差,使车辆可实时跟踪路径.
根据图2可得车辆的横向误差如式(8)所示:
为方便计算,假设车辆质心侧偏角β=0,则车辆航向角误差如式(9)所示:
eφ=φ-θr. (9)
对式(12)和式(13)进行进一步变换,可得到无人驾驶车辆转向过程中横向误差和航向误差的状态空间方程如式(14)所示:
车辆动力学跟踪误差模型进一步简化为
式中:
2 路径跟踪控制器设计
基于车辆路径跟踪误差模型,设计如图3所示的路径跟踪控制器.已知路径规划信息结合车辆实时状态信息和位姿信息,计算路径跟踪误差,并设计LQR控制器.在此基础上,采用改进遗传算法优化LQR的权重矩阵Q和R,以提高控制器的性能.同时,由于算法控制具有滞后性,在车辆实时状态信息之后加入预测模块,让算法对道路具有预见性,实现更精确的控制.
2.1 LQR控制器设计
2.1.1 经典LQR控制器设计
LQR控制器的实质就是寻求控制量和状态量在线性约束条件下的最优控制规律,即使得下列目标函数达到最小值.
式中:X为系统的状态变量;U为系统的控制变量;Q为状态误差的加权矩阵,表示对对应控制目标的重视程度;R为控制量的权重矩阵;q(1),q(2),q(3),q(4)分别为横向误差、横向误差变化率、航向误差和航向误差变化率的权重系数;q(5)为前轮转角的权重系数.
LQR控制器的反馈控制规律为
U(k)=-KX(k)." (19)
式中:K=(R+BTPB)-1BTPA,为控制增益系数.P是如下Riccati方程的正定解,为常量矩阵.
P=Q+ATPA-ATPB(R+BTPB)-1BTPA." (20)
将式(20)代入式(17),可以得到:
2.1.2 前馈控制
通过将式(19)代入式(15)可得:
U=-KX+δf." (23)
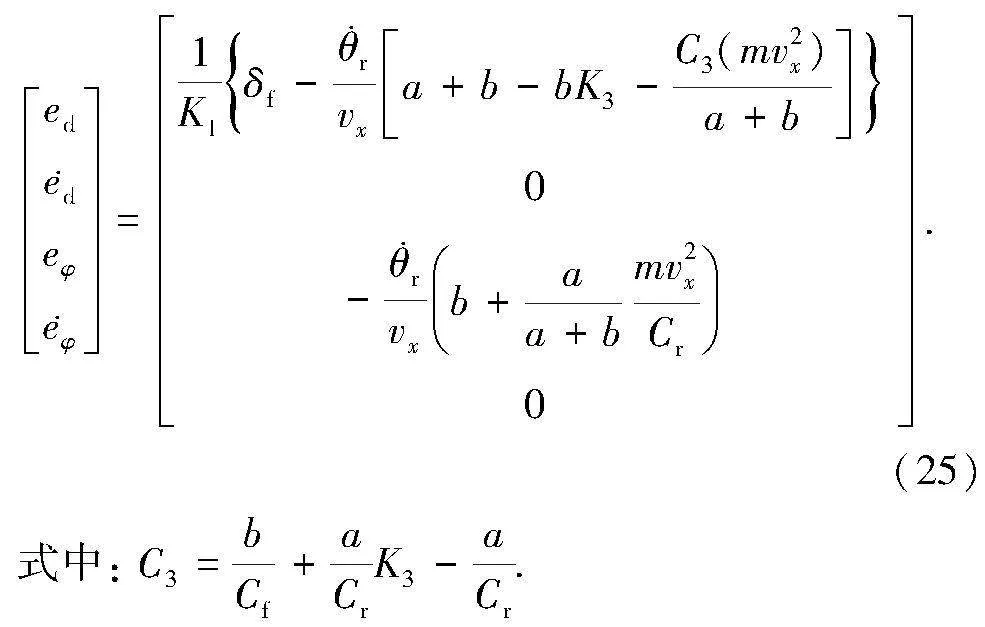
由式(24)可以得出,为了达到最优的控制效果,需要计算出适当的δf,使得系统的稳态误差为0.结合式(14)计算得出系统稳态误差方程如下:
根据式(25)可知:
为方便计算,假设车辆质心侧偏角β=0,则车辆航向角误差为eφ=φ-θr,而eθ=φ+β-θr=0,故航向误差可直接消去.若想让横向误差ed=0,则前馈控制量δf为
2.1.3 预测控制
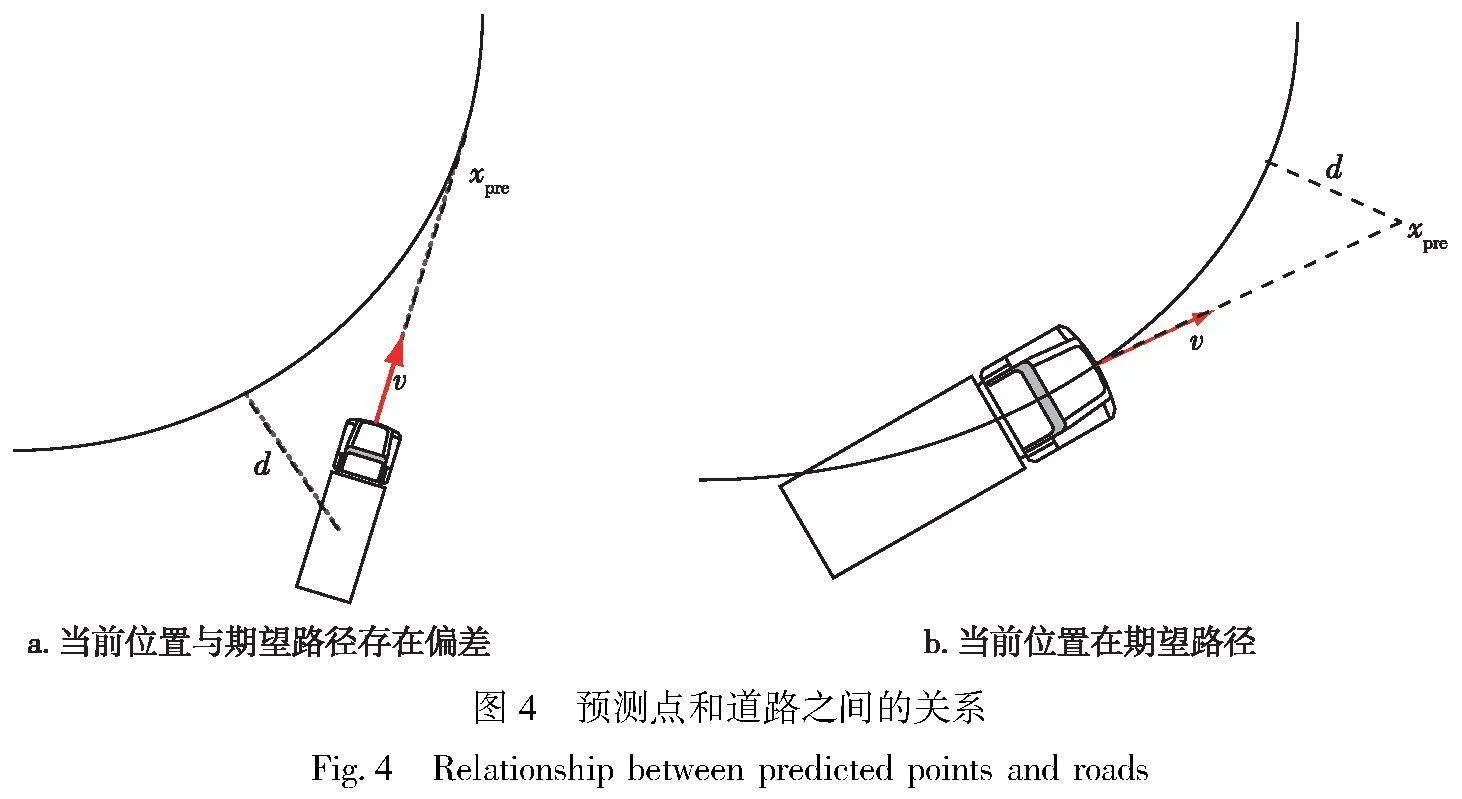
在驾驶过程中,人的操作往往具有一定的可预测性,这决定了人的驾驶决策.如图4中的场景所示:在图4a中,当前位置与期望路径之间存在误差,但是当车辆以当前情况行驶时,车辆将在期望路径上行驶,驾驶员不会改变驾驶行为,但是算法将向期望路径移动以减小误差;在图4b中,车辆的当前位置在期望路径上,但是当车辆以当前状态继续行驶时,车辆将偏离期望路径,算法也不采取行动,但是驾驶员将会改变方向盘转动角度.
车辆控制器和传感器的滞后特性使其无法确保良好的实时性能,因此,预测车辆的行驶路径至关重要.预测模块用于预测车辆的未来路径,以确保车辆在期望路径上行驶.定义tp是预测时间,则预测点位置信息为
式中:x和y表示车辆当前点的位置信息;xpre和ypre表示经过tp时间后车辆点的位置信息;φ是车辆当前时间点的横摆角;φpre是车辆经过时间tp后的横摆角;是车辆的横摆角速度.
2.2 基于GA优化的LQR控制器
遗传算法(Genetic Algorithm,GA)是一种基于模拟生物进化原理的搜索和优化方法[18-20].它通过模拟自然界中的遗传和进化过程,从一组候选解中寻找最优解或接近最优解.其基本原理是通过遗传操作(交叉、变异和选择)对种群中的个体进行进化,并通过适应度评估来评价个体的优劣.在每一代中,将经过选择和遗传操作产生的新个体与原始个体一同组成下一代种群.经过多代的进化,种群中的个体往往越来越适应问题的要求,最终得到一个最优的解.
由于其进化特性,搜索过程中不需要考虑问题的内在性质,对于任意形式的目标函数和约束,无论是线性的还是非线性的、离散的还是连续的都可处理.在LQR控制器设计中,权重矩阵Q和R为两个重要的参数,Q和R的选择是互相制约、互相影响的.当Q的取值越大时,路径跟踪控制器具有较好的跟踪性能,但是会牺牲较多的稳定性;当R的取值较大时,控制输出的角度越小,跟踪过程越平缓,但是跟踪性能不太好.因此,选择合理的Q和R是实现LQR控制器跟踪效果的关键.遗传算法对矩阵Q和R进行优化的具体流程如图5所示,设置适应度函数为对横向误差、横向误差一阶导数、航向误差、航向误差一阶导数之和求积分.
首先对参数进行编码,包括车辆基本参数和LQR状态空间方程系数,然后产生种群并且将种群个体依次赋值给LQR的权重矩阵,这些值是在可行的范围内随机产生的.再利用生成的权值系数Q、R计算LQR的最优反馈增益矩阵K,最后调用Simulink模型计算相关参数,再根据模型运行得到的参数计算适应度函数得到每个粒子的适应度值,若满足终止条件(适应度函数最小),则输出最优值,若不满足,则根据适应度函数值,进行交叉和变异操作,继续选择优良个体.
3 仿真验证
为了验证本文中提出的改进遗传算法优化的线性二次调节器(LQR)控制器的有效性,利用TruckSim和Matlab/Simulink进行联合仿真实验,Simulink软件用于构建横向路径跟踪控制器的架构,TruckSim软件用于构建车辆模型.分别在30 km/h和60 km/h速度下针对双移线工况和U形工况进行仿真,双移线工况表示较为常见的车辆在行驶过程中绕过障碍物的驾驶行为,U形工况涉及显著的曲率变化,并且对车辆跟踪和稳定性控制提出了高要求.由于行驶环境为正常的城市道路,均为干燥良好的沥青路面,故在本研究中,路面附着系数设定为0.85.卡车的主要参数如表1所示.
根据图5所示遗传算法对LQR的权重矩阵优化流程,对双移线工况和U形工况在30 km/h和60 km/h速度下分别进行优化取值,最终LQR权重矩阵的最优值如表2所示.
3.1 双移线工况仿真
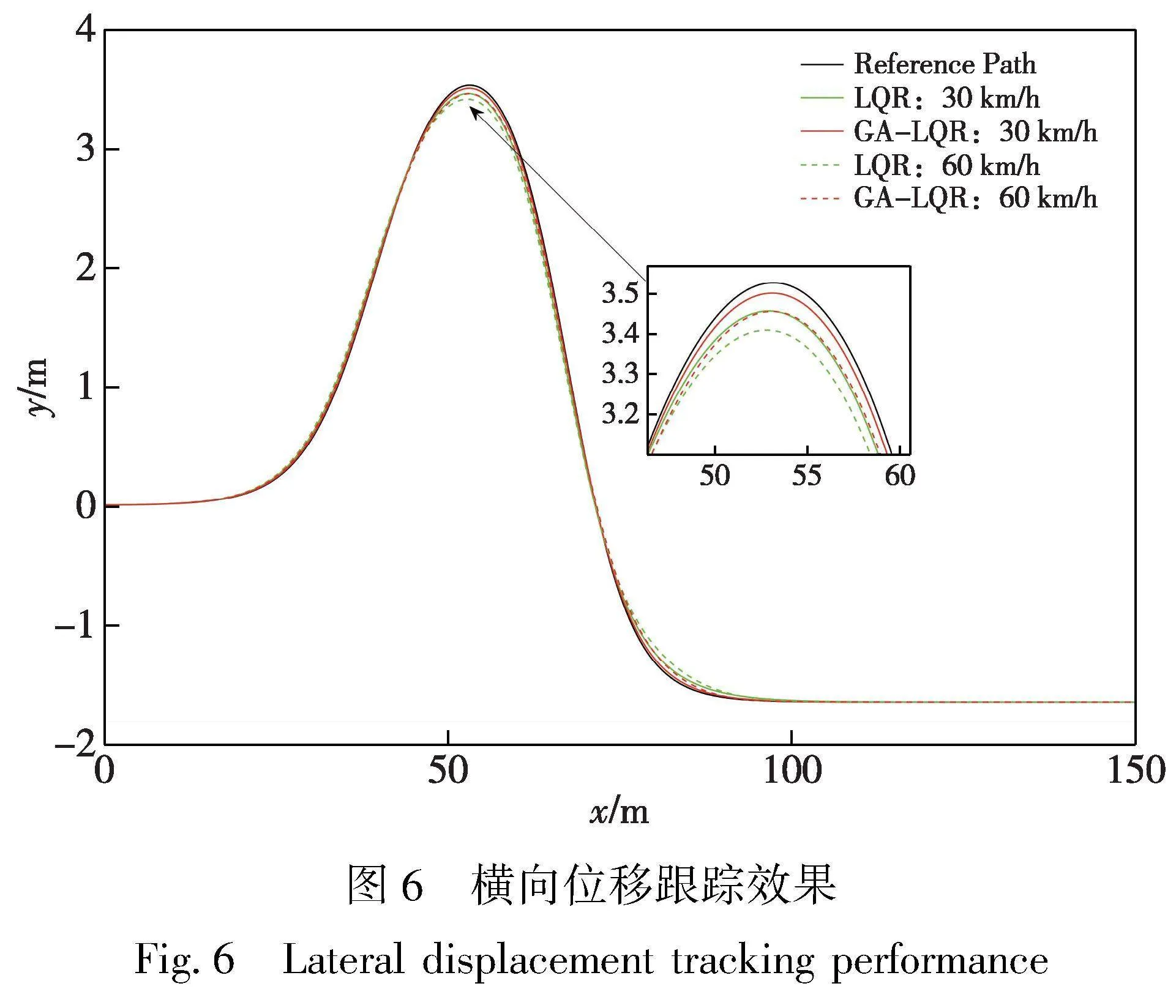
车辆横向位移跟踪效果如图6所示,可以看出两种车速下车辆均能很好地沿着参考路径行驶,但本文中设计的GA优化权重系数后的LQR控制器的跟踪效果更好,具有更好的稳定性.
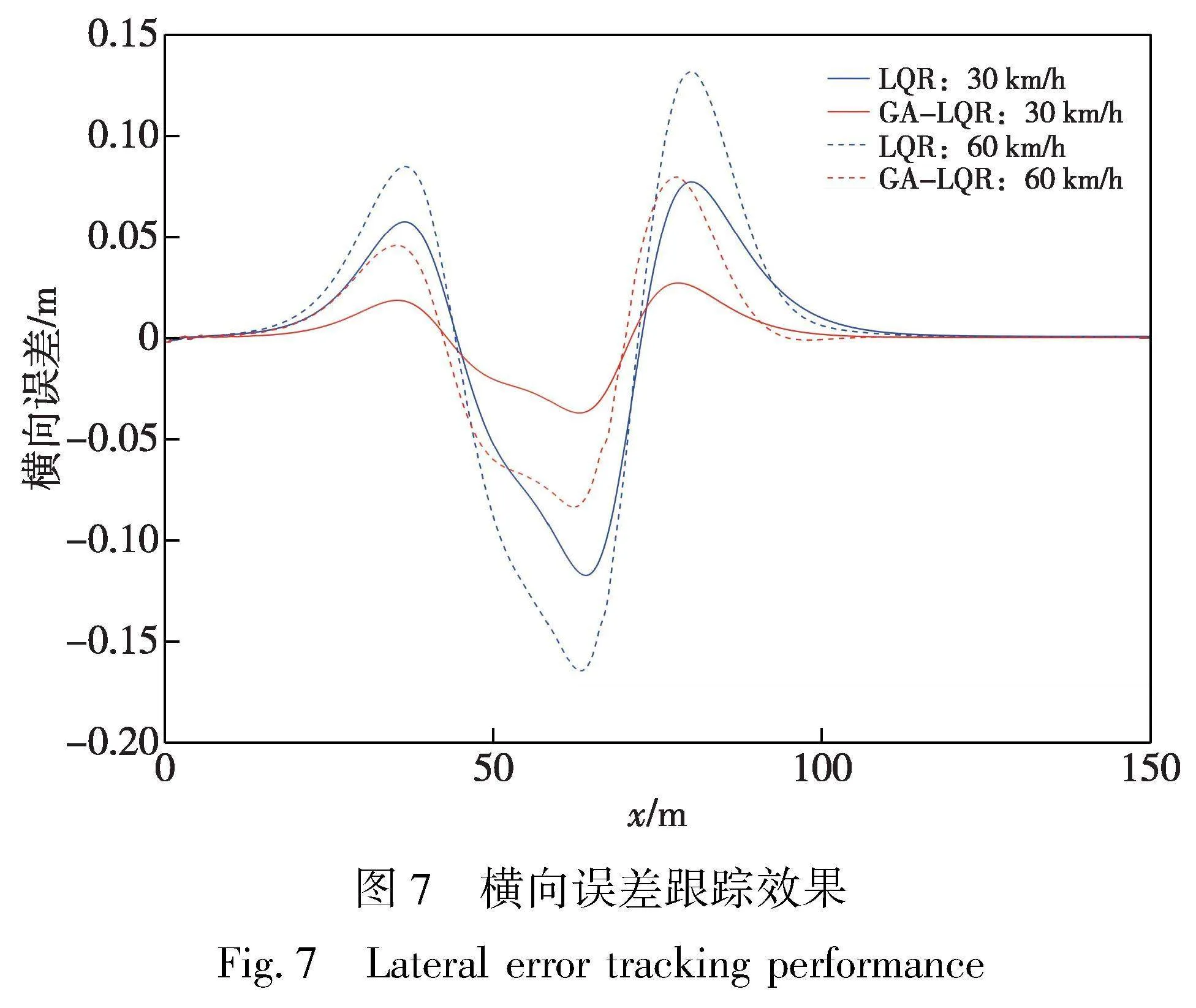
双移线工况下LQR控制器和GA优化后的LQR控制器在30 km/h和60 km/h速度下的横向误差跟踪效果如图7所示.从仿真结果及表3可以看出,不同速度下LQR控制器的最大跟踪误差均可控制在0.165 2 m以内,相比之下,本文中设计的GA-LQR控制器横向误差明显小于LQR控制器.在30 km/h速度下,GA-LQR最大横向误差可以控制在0.037 2 m以内,相对于传统LQR控制器提升约68.5%;在60 km/h速度下,GA-LQR最大横向误差可以控制在0.083 6 m之内,对于传统LQR控制器提升约49.4%.这表明本文中设计的LQR控制器可以更有效地减小误差,提升车辆在路径跟踪时的跟踪精度.
双移线工况下LQR控制器和GA优化后的LQR控制器在30 km/h和60 km/h速度下的航向误差跟踪效果如图8所示.从仿真结果可以看出,不同车速下的航向误差在0.106 1 rad以内,且差距不大,说明车辆的跟踪过程比较稳定.在30 km/h速度下,GA-LQR最大航误差可以控制在0.072 6 rad以内;在60 km/h速度下,最大航向误差可以控制在0.102 5 rad之内.
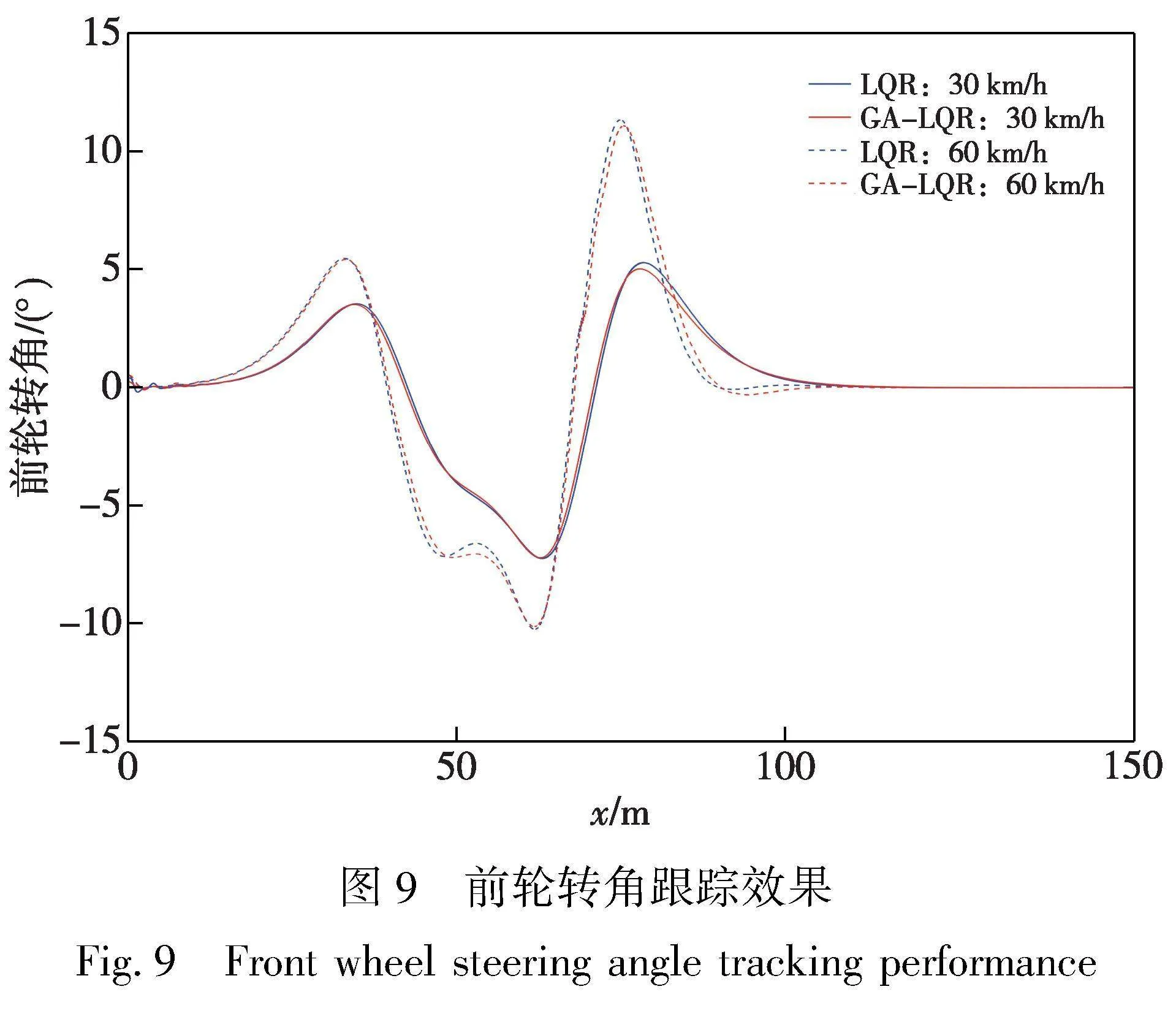
双移线工况下LQR控制器和GA优化后的LQR控制器在30 km/h和60 km/h速度下的前轮转角跟踪效果如图9所示.从仿真结果可以看出,随着车速增加,前轮转角逐渐变大,但转角并没有发生阶跃性变化,且不同车速下的前轮转角可以控制在-15°~15°范围内,说明跟踪过程比较稳定.
3.2 U形工况仿真
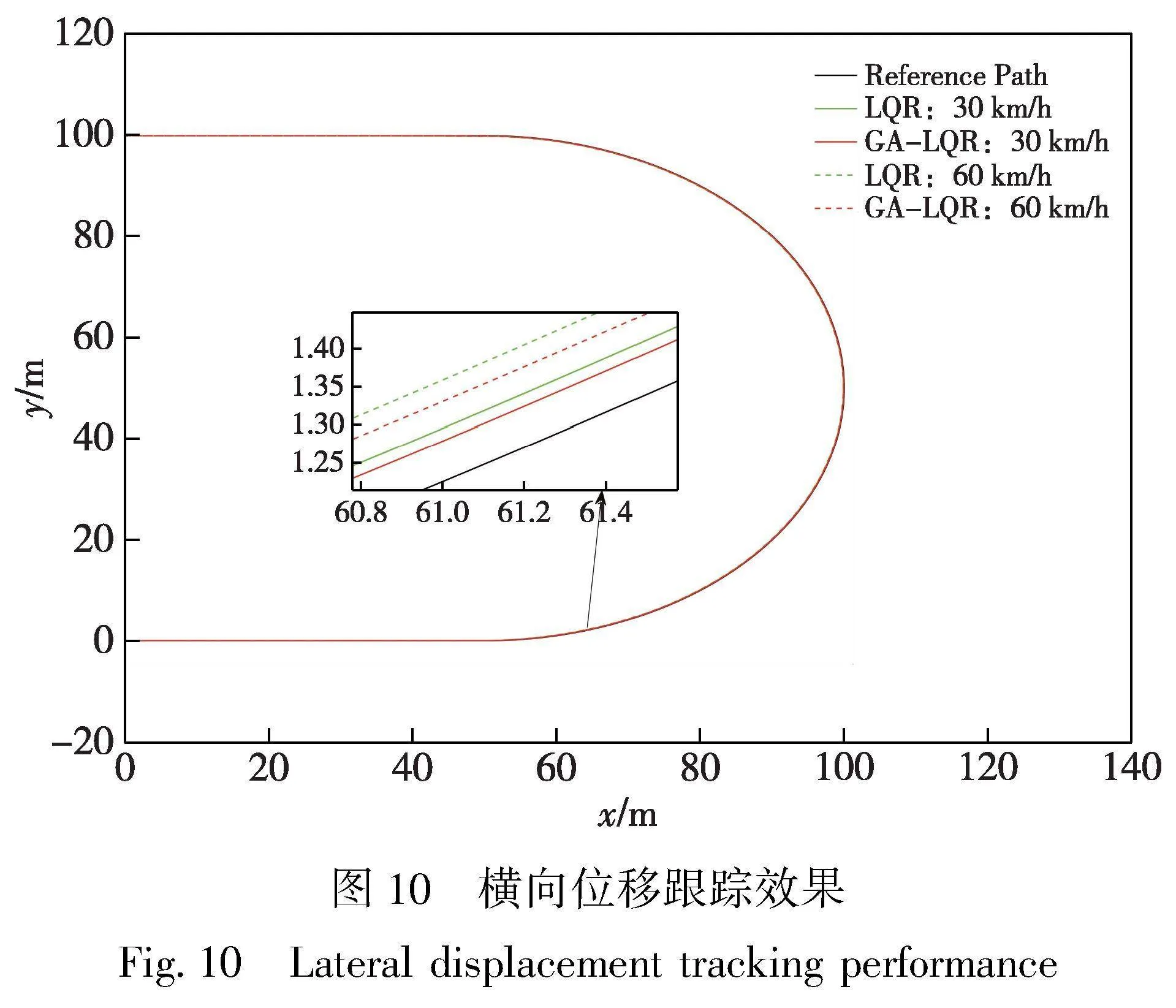
为了进一步验证本文中设计的路径,图10详细地显示了U形工况的参考路径,车速保持在30 km/h和60 km/h的GA优化前后的LQR控制器跟踪效果.可以发现,从路径50 m处到100 m进入弯道后,两种控制器均能够稳定地对参考路径进行跟踪,但GA优化后的LQR控制器的跟踪效果优于LQR控制器.
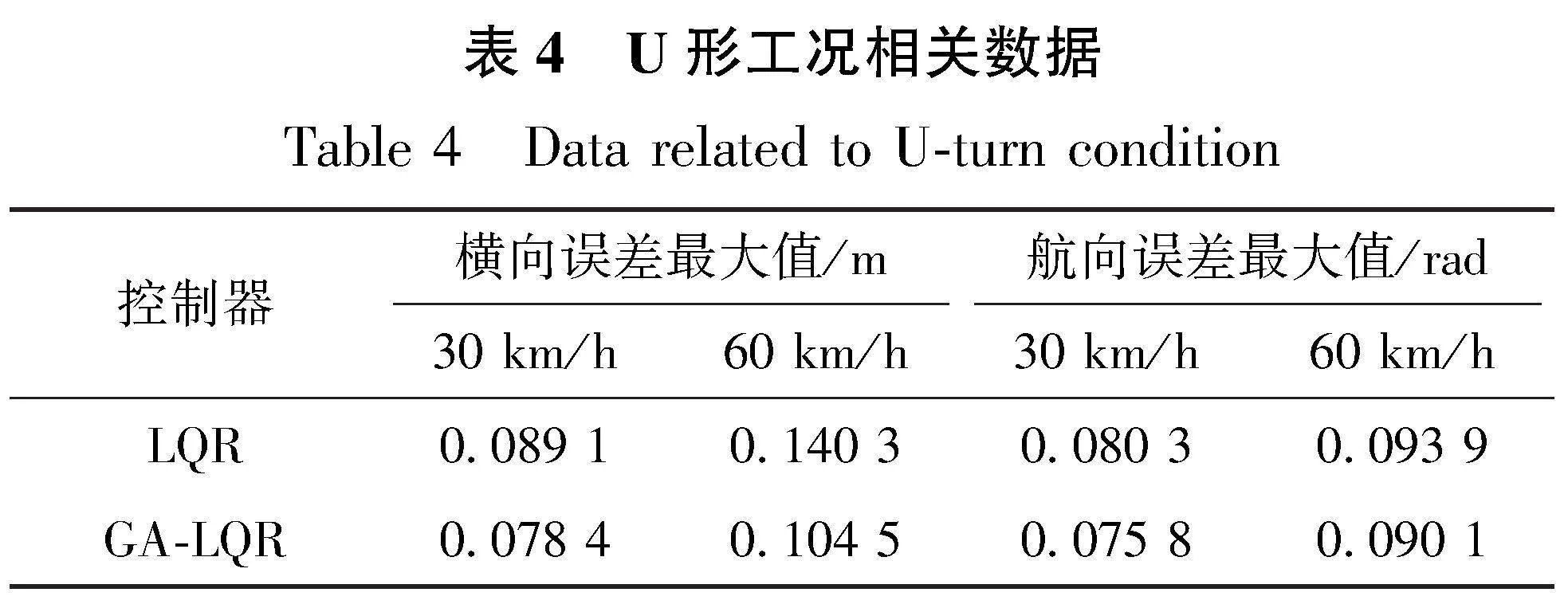
U行工况下LQR控制器和GA优化后的LQR控制器在30 km/h和60 km/h速度下的横向误差跟踪效果如图11所示.由于直线进入弯道时路径曲率不连续且突变较大,在路程50 m处控制器由较大超调.但从图11及表4可以看出,不同速度下LQR控制器的最大跟踪误差均可控制在0.140 3 m以内,而且相比之下,本文中设计的GA-LQR控制器横向误差明显小于LQR控制器.在30 km/h速度下,GA-LQR最大横向误差可以控制在0.078 4 m以内,相对于传统LQR控制器提升约12.0%;在60 km/h速度下,最大横向误差可以控制在0.104 5 m之内,对于传统LQR控制器提升约25.5%.这表明本文中设计的LQR控制器可以更有效地减小误差,提升车辆在路径跟踪时的跟踪精度.
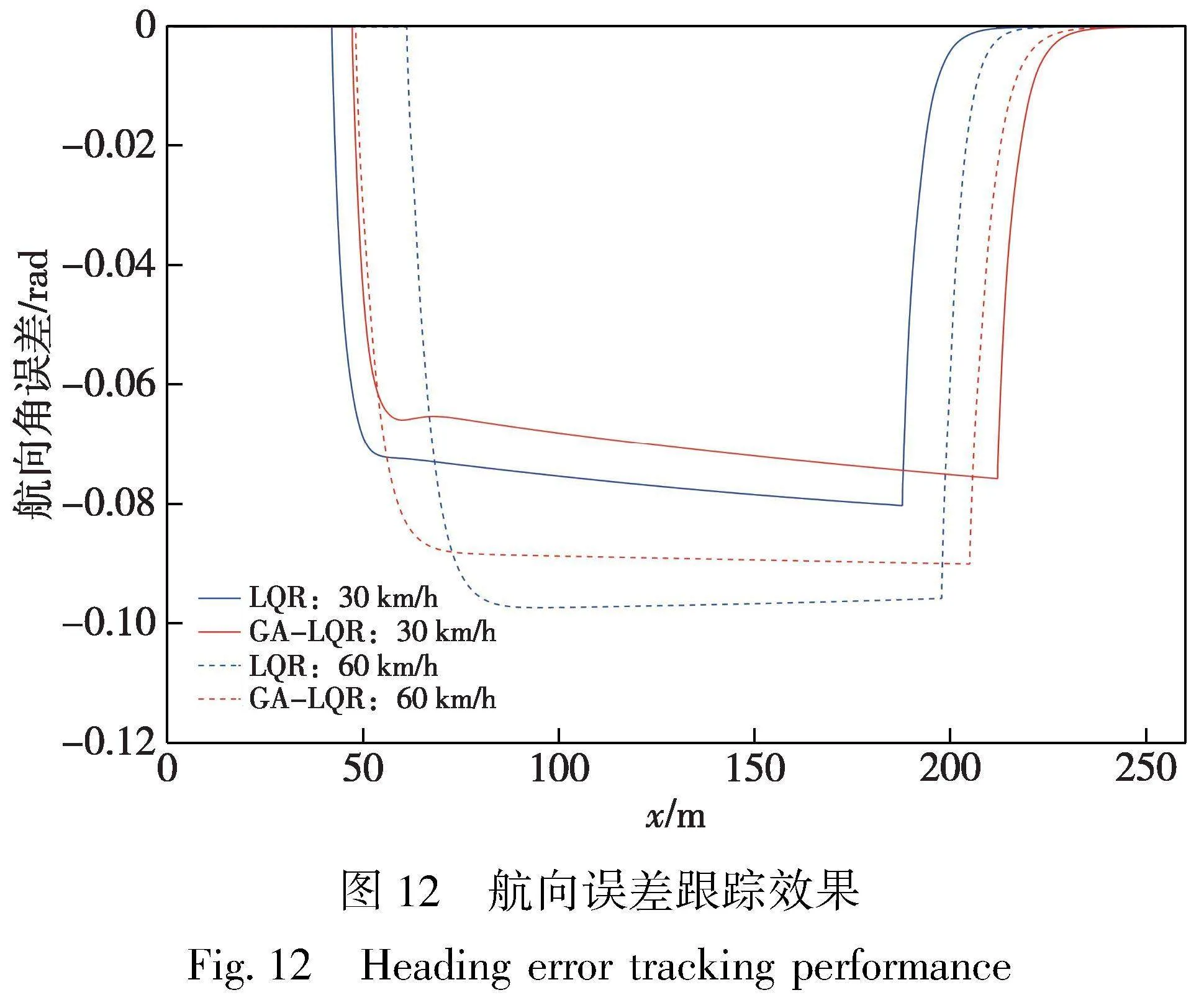
U形工况下LQR控制器和GA优化后的LQR控制器在30 km/h和60 km/h速度下的航向误差跟踪效果如图12所示.从仿真结果可以看出,不同车速下的航向误差均在0.093 9 rad以内,且差距不大,说明车辆的跟踪过程比较稳定.在30 km/h速度下,GA-LQR最大航误差可以控制在0.075 8 rad以内;在60 km/h速度下,最大航向误差可以控制在0.090 1 rad之内,相对于传统LQR控制器均有提升.
U形工况下LQR控制器和GA优化后的LQR控制器在30 km/h和60 km/h速度下的前轮转角跟踪效果如图13所示.从仿真结果可以看出,随着车速增加,前轮转角逐渐变大,但转角并没有发生阶跃性变化,且不同车速下的前轮转角可以控制在0°~10°范围内,说明跟踪过程比较稳定.
4 结论
针对传统LQR控制器下无人驾驶卡车在路径跟踪时跟踪精度低、稳定性差的问题,考虑前馈控制补偿前轮转角,以减轻因车辆动力学模型简化带来的稳态误差,基于改进遗传算法对权重系数进行优化调节,在实现更高跟踪精度的同时兼顾车辆的行驶稳定性.本文在TruckSim和Matlab/Simulink平台进行了联合仿真,对所设计的无人驾驶卡车路径跟踪控制器进行了仿真验证,结果表明,
相比传统LQR控制器,本文设计的GA-LQR控制器在参考路径下,具有更好的跟踪精度和稳定性.未来将在实车上进一步验证本文方案.
参考文献References
[1]Mittal N,Udayakumar P D,Raghuram G,et al.The endemic issue of truck driver shortage:a comparative study between India and the United States[J].Research in Transportation Economics,2018,71:76-84
[2] Wang F,Zhang Z F.Route control and behavior decision of intelligent driverless truck based on artificial intelligence technology[J].Wireless Communications and Mobile Computing,2022,2022:7025081
[3] Ahn J,Shin S,Kim M,et al.Accurate path tracking by adjusting look-ahead point in pure pursuit method[J].International Journal of Automotive Technology,2021,22(1):119-129
[4] Wang L,Zhai Z Q,Zhu Z X,et al.Path tracking control of an autonomous tractor using improved Stanley controller optimized with multiple-population genetic algorithm[J].Actuators,2022,11(1):22
[5] Belman-Flores J M,Rodríguez-Valderrama D A,Ledesma S,et al.A review on applications of fuzzy logic control for refrigeration systems[J].Applied Sciences,2022,12(3):1302
[6] Chen Z Y,Liu Y,He W,et al.Adaptive-neural-network-based trajectory tracking control for a nonholonomic wheeled mobile robot with velocity constraints[J].IEEE Transactions on Industrial Electronics,2021,68(6):5057-5067
[7] 邵俊恺,赵翾,杨珏,等.无人驾驶铰接式车辆强化学习路径跟踪控制算法[J].农业机械学报,2017,48(3):376-382
SHAO Junkai,ZHAO Xuan,YANG Jue,et al.Reinforcement learning algorithm for path following control of articulated vehicle[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(3):376-382
[8] Wang D J,Chen J H,Chen Y,et al.Parking robot path-tracking system based on discrete PID algorithm[J].Journal of Advanced Computational Intelligence and Intelligent Informatics,2023,27(3):411-420
[9] 王艺,蔡英凤,陈龙,等.基于模型预测控制的智能网联汽车路径跟踪控制器设计[J].机械工程学报,2019,55(8):136-144,153
WANG Yi,CAI Yingfeng,CHEN Long,et al.Design of intelligent and connected vehicle path tracking controller based on model predictive control[J].Journal of Mechanical Engineering,2019,55(8):136-144,153
[10] Hu C,Chen Y M,Wang J M.Fuzzy observer-based transitional path-tracking control for autonomous vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2021,22(5):3078-3088
[11] Wu Y,Wang L F,Zhang J Z,et al.Path following control of autonomous ground vehicle based on nonsingular terminal sliding mode and active disturbance rejection control[J].IEEE Transactions on Vehicular Technology,2019,68(7):6379-6390
[12] Wang Z Q,Sun K Y,Ma S Q,et al.Improved linear quadratic regulator lateral path tracking approach based on a real-time updated algorithm with fuzzy control and cosine similarity for autonomous vehicles[J].Electronics,2022,11(22):3703
[13] 陈亮,秦兆博,孔伟伟,等.基于最优前轮侧偏力的智能汽车LQR横向控制[J].清华大学学报(自然科学版),2021,61(9):906-912
CHEN Liang,QIN Zhaobo,KONG Weiwei,et al.Lateral control using LQR for intelligent vehicles based on the optimal front-tire lateral force[J].Journal of Tsinghua University (Science and Technology),2021,61(9):906-912
[14] Kapania N R,Gerdes J C.Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling[J].Vehicle System Dynamics,International Journal of Vehicle Mechanics and Mobility,2015,53(12):1687-1704
[15] Xu S B,Peng H E.Design,analysis,and experiments of preview path tracking control for autonomous vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2020,21(1):48-58
[16] 王柏林,李云伍,赵颖,等.基于蚁狮算法优化的LQR横向跟踪控制策略[J].重庆理工大学学报(自然科学),2023,37(4):27-38
WANG Bolin,LI Yunwu,ZHAO Ying,et al.LQR lateral tracking control strategy based on ALO algorithm[J].Journal of Chongqing University of Technology (Natural Science),2023,37(4):27-38
[17] 胡杰,钟鑫凯,陈瑞楠,等.基于模糊LQR的智能汽车路径跟踪控制[J].汽车工程,2022,44(1):17-25,43
HU Jie,ZHONG Xinkai,CHEN Ruinan,et al.Path tracking control of intelligent vehicles based on fuzzy LQR[J].Automotive Engineering,2022,44(1):17-25,43
[18] Chen C,Ma R,Ma W.GA-LQR for vehicle semi-active suspension with BiLSTM inverse model of magnetic rheological damper[J].Transactions of the Canadian Society for Mechanical Engineering,2023,47(3):423-435
[19] 罗玉涛,周天阳,许晓通.基于遗传算法的四轮转向-驱动汽车时变LQR控制[J].华南理工大学学报(自然科学版),2021,49(3):114-122
LUO Yutao,ZHOU Tianyang,XU Xiaotong.Time-varying LQR control of four-wheel steer/drive vehicle based on genetic algorithm[J].Journal of South China University of Technology (Natural Science Edition),2021,49(3):114-122
[20] 宋春生,于传超,张锦光,等.基于遗传算法的复杂双层磁悬浮精密隔振系统LQR控制研究[J].振动与冲击,2016,35(16):99-105
SONG Chunsheng,YU Chuanchao,ZHANG Jinguang,et al.LQR control of a complex two-stage magnetic suspension active precise isolation system based on the genetic algorithm[J].Journal of Vibration and Shock,2016,35(16):99-105
Path tracking control of unmanned truck based on genetic algorithm
Abstract Path tracking is essential for unmanned driving.This article presents the design of a path tracking system for unmanned trucks,aiming to enhance accuracy and stability across various speeds.The system employs a Linear Quadratic Regulator (LQR) optimized through an improved Genetic Algorithm (GA).First,a two-degree-of-freedom dynamic model and a tracking error model of the vehicle are established based on natural coordinate system.Subsequently,an LQR controller is designed to eliminate steady-state errors and enhance tracking accuracy through feedforward control.Second,the genetic algorithm is enhanced to optimize the weight matrix of the LQR controller,resulting in improved accuracy and stability for path tracking.Finally,the control effectiveness of the designed LQR controller is simulated and verified across a range of operating conditions using the joint simulation platform of Matlab/Simulink and TruckSim.The results show that the GA-optimized LQR (Linear Quadratic Regulator) controller improves the tracking accuracy by about 68.5% and 49.4% at speeds of 30 km/h and 60 km/h,respectively,under the double lane change scenario;while under the U-turn scenario,the tracking accuracy is enhanced by approximately 12.0% and 25.5%,respectively.Specifically,it demonstrates higher stability,with position and heading errors controllable within 0.17 m and 0.11 rad,respectively,thereby validating the efficacy of the proposed tracking control scheme.
Key words unmanned truck;path tracking;LQR controller;improved genetic algorithm
