面向侧视MLS点云的行道树单木分割方法
2024-12-12 00:00:00严宇李秋洁李卫正
南京林业大学学报(自然科学版) 2024年6期

摘要:【目的】针对行道树资源调查中的行道树单木分割问题,研究面向侧视移动激光扫描(mobile laser scanning,MLS)点云的行道树单木分割方法,对沿道路方向扫描采集到的街道两侧的点云,建立能够准确实现行道树单木分割的点云实例分割算法。【方法】对点云中的点提取局部特征,将局部特征输入行道树点云检测器,在点云中识别出行道树点云;对于识别出的行道树点云采用基于密度的聚类算法(density-based spatial clustering of applications with noise,DBSCAN)进行聚类,在聚类簇中筛选出行道树簇并滤除非行道树点云;提取各行道树簇的树干点云,使用DBSCAN算法聚类得到若干个树干簇,统计每个行道树簇中包含的树干簇个数;对于包含多个树干簇的行道树簇使用垂直切片与垂直切割结合的方法将其粗分割为多棵单株行道树;使用DBSCAN与K近邻(K-nearest neighbor,KNN)相结合的方法对单株行道树进行细分割,得到最终的行道树单木分割结果。采集街道两侧的点云数据,开展了行道树点云检测器训练、细分割精度测试及算法对比试验。【结果】面向侧视MLS点云的行道树单木分割方法在点云数据上的精确度、召回率、F1分数分别为0.970 4、0.951 0、0.960 6,优于以往研究报道的两种先识别再分割的方法。【结论】提出的方法可以准确实现对MLS点云中行道树的单木分割,为行道树资源调查工作节省人力成本。
关键词:行道树单木分割;移动激光扫描;随机森林;DBSCAN聚类;激光雷达
中图分类号:S758;TP391""" 文献标志码:A开放科学(资源服务)标识码(OSID):
文章编号:1000-2006(2024)06-0166-09
A single tree segmentation method for street trees facing side-looking MLS point clouds
YAN Yu,LI Qiujie*,LI Weizheng
(College of Mechanical and Electronic Engineering, Nanjing Forestry University, Nanjing 210037,China)
Abstract: 【Objective】Aiming at the problem of single tree segmentation of street trees in the investigation of street tree resources, a single tree segmentation method of street trees facing the side looking mobile laser scanning (MLS) point cloud was studied. The point clouds on both sides of the street scanned along the road direction were collected. A point cloud instance segmentation algorithm which can accurately implement single tree segmentation of street trees is established.【Method】The local features were extracted from the points in the point cloud, and the local features were input into the street tree point cloud detector to identify the street tree point cloud in the point cloud. For the identified street tree point clouds, the density-based spatial clustering of applications with noise (DBSCAN) was used to cluster the street tree clusters and filter out the street tree point clouds. The trunk point cloud of each street tree cluster was extracted, and several tree clusters were obtained using DBSCAN algorithm. The number of tree clusters contained in each street tree cluster was counted. For street tree clusters containing multiple trunk clusters, the method of vertical slicing and vertical cutting was used to divide the cluster into multiple single tree. The method of combining DBSCAN and K-nearest neighbor (KNN) was used to segment a single street tree in fine order to obtain the final tree segment result. The point cloud data on both sides of the street were collected, and three sets of experiments were carried out: street tree point cloud detector training, fine segmentation accuracy test and algorithm comparison.【Result】The accuracy rate, recall rate and F1 score of the street tree segmentation method facing side-looking MLS point cloud were 0.970 4, 0.951 0 and 0.960 6, respectively, which were superior to the two existing methods of first recognition and then segmentation. 【Conclusion】The proposed method can accurately segment street trees in MLS point cloud, and save labor cost for street tree resource investigation.
Keywords:street tree single tree segmentation; mobile laser scaning (MSL);" random forest; DBSCAN clustering; LiDAR
行道树是城市生态系统的重要组成部分,具有缓解温室效应、遮阴降噪、提升城市美观性等重要作用,是城市绿化建设的重点对象[1-4]。城市森林资源调查中的行道树资源调查工作是开展城市森林生态研究的前提条件,目前主要采用人工实测、抽样调查的方法获取行道树树种、科属、胸径、树高、冠幅等参数,工作量大,效率低下,不能及时准确地反映行道树动态变化状况[5]。探索一种能够在大范围及呈零散分布状态的城市道路中快速、高效、准确地获取行道树参数的现代测量方法具有重要的理论意义和实践价值。
基于激光雷达(light detection and ranging,LiDAR)的林木参数提取已经成为当前的研究热点及未来的发展趋势[6-7]。LiDAR通过激光测距可以快速获取周边环境的信息[8-10],LiDAR获取到的点云数据具有高分辨率、高精度等优点,通过对获取的点云进行单木分割,再对分割出的每棵行道树提取行道树参数,可以有效节省人力成本[11-13],提高行道树资源调查的效率。然而,面对复杂多样的城市地物类型,准确实现点云中行道树的单木分割并不容易,基于 LiDAR 的行道树单木分割是一项复杂且具有挑战性的工作。
在点云中对行道树进行单木分割,即在点云中对行道树进行实例分割。在点云实例分割的方法中,基于超体素的方法,将空间划分为三维体素,对体素进行超体素分割,在超体素的基础上滤除非行道树点,最后对剩余的超体素进行聚类实现行道树实例分割[14-16],这类方法虽在行道树实例分割上的精度较高,但当两棵行道树的树冠高度重叠时,此类方法并不能将行道树重叠部位较好地分割开来;基于深度学习的一类方法是将原始点云直接作为输入,自动挖掘点云数据的深层特征,最后输出点云的实例分割模型[17-19],基于深度学习的另一类方法是将点云无损转换为二维图像,在图像实例分割的基础上建立点云实例分割模型[20],这两类基于深度学习的方法在有大量的训练数据集作为支撑的情况下,得到的实例分割模型能够对点云中的行道树进行精准分割,然而获取大量的训练数据集并不容易做到。
先识别再分割的方法[21-22],即先对点云中的行道树进行识别,在识别出的行道树点云上进行实例分割。文献[21]为识别出的行道树点云寻找最优投影面,并将其投影为二维图像,之后在图像上对行道树进行边缘检测,检测完成后依据边缘信息进行反投影,对点云中的行道树进行单木分割;文献[22]将识别到的行道树点云,垂直投影到二维平面,使用MeanShift算法对其进行聚类而实现对行道树的实例分割[23]。文献[21]的方法对于树冠高度重叠的相邻行道树,在图像上采用边缘检测的方法并不能将其分割开来,进而无法在点云中对行道树实现单木分割。文献[22]使用MeanShift算法对识别出的行道树点云进行实例分割,MeanShift算法基于一个类的中心点处的空间密度最大,为每个点沿着密度方向由稀疏指向稠密寻找点所在类的中心点,将找到同一中心点的点合并为一类, MeanShift聚类下被误分割的非行道树点云易被误分割为行道树,同时,对于树冠高度重叠的相邻行道树,MeanShift算法并不能将其很好地分割开来。
针对树冠高度重叠的相邻行道树在单木分割中难以分割的问题,本研究分析了面向侧视移动激光扫描(mobile laser scanning,MLS)点云的行道树单木分割方法,对沿道路方向扫描采集到的街道两侧的点云,提出了一种多层次的行道树单木分割方法,共分为5个步骤。第1步先从点云中识别出行道树点云;第2步使用具有噪声的基于密度的聚类(density-based spatial clustering of applications with noise,DBSCAN)[24]算法对行道树点云聚类并筛选出行道树簇;第3步对行道树簇中行道树的个数进行检测;第4步依据树干的位置采用统计的方法对第3步检测出的存在多个行道树的行道树簇进行垂直分割。经过这4层的处理可以准确确定点云中的行道树个数并将其分割开来,然而垂直分割会导致分割出来的行道树的树枝末梢存在一定的误分割,方法的最后一步采用DBSCAN与K近邻(K-nearest neighbor,KNN)[25]相结合的方法对这部分误分割进行优化。这5个步骤通过从识别到分割最后优化的多层处理,可以准确对点云中行道树实现单木分割。
1 材料与方法
1.1 数据采集与精度评价指标
采用ZEB-HORIZON移动手持式扫描仪采集位于118°48′58.8″E,32°04′55.1″N的一段道路的点云数据。此段街道长约290 m,共有77棵行道树,主要树种有东京樱花(Prunus" yedoensis)、银杏(Ginkgo biloba)、朴树(Celtis sinensis)、樟(Camphora officinarum)等,高度范围4.6~8.2 m,冠幅范围2.1~7.4 m。此外,还包括建筑、车道、人行道、长凳、路灯、自行车、标志牌、行人、小轿车、灌木、草皮、花坛等地物。
使用精确度Pr、召回率Re和F1分数作为评估行道树点云实例检测精度的性能指标。精确度、召回率、F1分数的计算方式[26]如下:
(3)
其中:PT为预测为行道树点云且真实为行道树点云的点数;
PF为预测为行道树点云但不是行道树点云的点数;
NF为预测不是行道树点云但真实为行道树点云的点数。
1.2 行道树分割流程
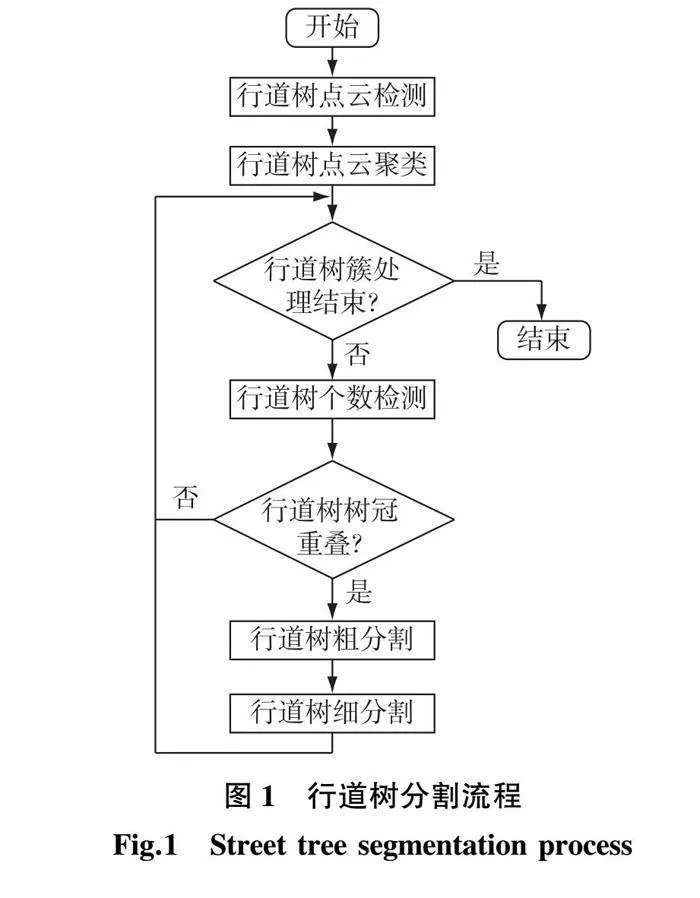
行道树分割的流程如图1所示。
行道树分割包括行道树点云检测、行道树点云聚类、行道树个数检测、行道树粗分割、行道树细分割5个步骤。首先,对MLS采集的点云建立球域,并对每个点进行局部特征提取,将提取的局部特征输入训练好的行道树点云检测器,在点云中识别出行道树点云;其次,使用DBSCAN算法对行道树点云聚类,并对聚类簇进行筛选,得到若干个行道树簇;之后,对每个行道树簇依据高程提取其树干点云,再使用DBSCAN算法对树干点云进行聚类,得到若干个树干簇,统计每个行道树簇下的树干簇个数,确定此行道树簇中的行道树个数;对于包含多棵行道树的行道树簇,采用垂直切片与垂直分割结合的方法将该行道树簇粗分割为多棵单株行道树;最后,迭代使用DBSCAN与KNN相结合的方法对行道树簇粗分割出来的单株行道树进行细分割,得到最终的行道树单木分割结果。
1.3 行道树点云检测
采用随机森林分类器[27]来训练行道树检测器。随机森林分类器由多个决策树组合得到,每一个决策树模型的训练都是单独的,在分类时,每一个决策树都会得到一个单独的类别结果,随机森林将这些结果以投票的方式进行组合,即将个数最多的类别作为最终的输出结果。
依据文献[22]的方法从点云中识别行道树点云,对MLS采集的点云中每个点分别建立半径为500 mm的球域,以每个点球域中包含点的坐标(x,y,z)提取该点的13个点云局部三维特征,13个局部特征分别为高程、高程差、高程标准差、线度、面度、球度、全方差、各异向性、特征熵、特征值之和、垂直度、曲度、密度。将每个点的13个局部特征输入训练好的行道树检测器,即可在采集的点云中识别出所有行道树点云。
1.4 行道树点云聚类
采用DBSCAN算法对所有行道树点云进行聚类,然后从聚类簇中筛选出行道树簇,这里行道树簇定义为密度相连的行道树点的最大集合。
DBSCAN聚类需要先设定好扫描半径和最小包含点数,之后,在点云中任选一个未访问的点,找出点云中与此点距离在扫描半径内的所有点。若找出的点数量小于最小包含点数,则将此点标记为噪声点;否则,将此点与扫描半径内的点形成一个簇,将此点标记为已访问,然后递归。以同样的方式处理该簇内所有未被访问的点,对该簇进行拓展直到该簇内的所有点都被标记为已访问后,以同样的算法去处理其他未被访问的点。
以检测到的行道树点云的坐标(x,y,z)为输入,采用DBSCAN算法对行道树点云聚类,将其分割为若干个聚类簇。DBSCAN需要2个参数,即扫描半径ε1和最小邻域点数N1。设置ε1=0.5 m,N1=C1m1,m1为所有行道树点的平均邻域点数(半径为0.5 m),C1为常数,一般取0.02~0.15。DBSCAN聚类后得到的聚类簇中有部分聚类簇包含的点云真实并不为行道树点云,需要对这部分聚类簇进行滤除。考虑到行道树在空间中的高度差异,本研究将在空间中高程差低于3 m的聚类簇滤除,剩余的聚类簇将其标记为行道树簇。
1.5 行道树个数检测
使用 DBSCAN 算法对行道树点云聚类后,得到的行道树簇存在包含单棵行道树和多棵行道树两种情况,为将点云中所有的行道树分割出来,需要对每个行道树簇中的行道树的个数进行检测。行道树虽因为树冠间重叠而导致多棵行道树被聚类为同一行道树簇,但其树干间不存在重叠,因此,本研究通过检测每个行道树簇中的树干点云来检测此行道树簇中行道树的个数。
首先,记录待检测的行道树簇中最低点的高度坐标,提取该行道树簇中高程距离最低点0~1.4 m间的所有点云,将其标记为树干点云,使用DBSCAN算法对树干点云的坐标进行聚类得到若干个树干簇,这里DBSCAN算法参数中,扫描半径ε2=0.5 m,最小邻域点数N2=10。若树干点云DBSCAN聚类后仅得到1个树干簇,则判定此行道树簇仅包含1棵行道树,直接将其分割为单株行道树,为其分配行道树标签;若树干点云DBSCAN聚类后得到1个以上的树干簇,则判定此行道树簇中存在多棵行道树,且其树冠间相互重叠,为包含多棵行道树的行道树簇执行行道树粗分割。
1.6 行道树粗分割
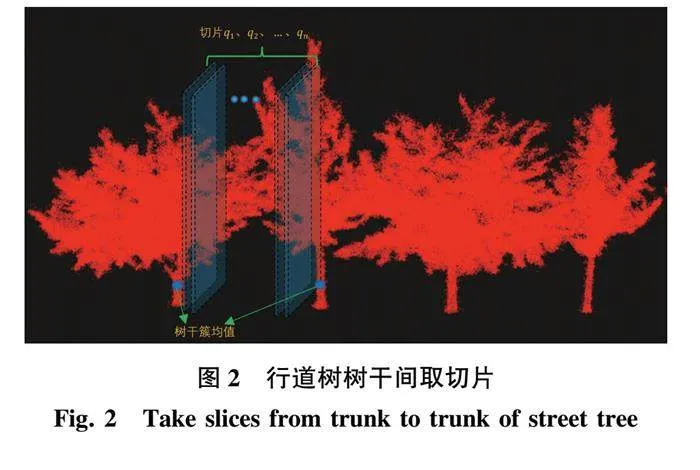
行道树在街道边是沿直线种植的,因此,行道树簇所包含的树干簇在空间中也是近似沿直线排列。所以,可以依据树干所处的位置使用一个分割平面将树冠重叠的两棵相邻行道树分开,此分割平面所处位置的附近行道树点云应当最少。因此,采用沿行道树种植的直线方向逐一切割的方式将包含多棵行道树的行道树簇使用分割平面分割为多棵单株行道树,如图2所示。根据待分割行道树簇所包含的树干簇在空间中的直线排列方向取其中的一对相邻树干簇,计算所取相邻树干簇各自包含点云的均值坐标,将此相邻树干簇的均值坐标相连作为法向量,在此对树干簇间等距离取n块厚度为0.01 m的垂直切片,将其依次记为q1,q2,…,qn。
统计切片q1,q2,…,qn各自包含的点云个数,记为x1,x2,…,xn,切片中包含的点云个数越少则认为此切片为分割平面的可能性越高,依据公式(4)计算各切片为分割平面的概率。
pi=(1/xi)∑ni=1(1/xi),i=1,2,…,n。
(4)
其中:pi为第i块切片为分割平面的概率,xi为第i块切片中所包含的点云个数。
之后,通过公式(5)计算最终的分割平面所处的位置T。根据确定的分割平面将此行道树簇一分为二,即可将1棵单株行道树从此行道树簇中分割出来,为分割出来的此棵单株行道树分配行道树标签。
T=∑ni=1pi·i。
(5)
其中:T代表切片中第i块切片所处的位置,pi为第i块切片为分割平面的可能性。
1.7 行道树细分割
KNN分类器是给定一个训练数据集,对新的输入实例,在训练数据集中找到与该实例最邻近的k个实例,这k个实例的多数属于某个类,就把该输入实例分类到这个类中。对于分割平面直接切割行道树簇而导致分割出的单株行道树的树枝末梢存在误分割,本研究采用DBSCAN和KNN分类器结合的方法对树枝末梢部分误分割的点云重新分类,对粗分割出的多棵行道树进行细分割。细分割的具体步骤如下:
1)以单株行道树点云的坐标(x,y,z)为输入,采用DBSCAN算法对行道树簇粗分割出来的单株行道树进行聚类,将其分割为若干个子簇。其中,邻域半径ε3=0.2 m,最小邻域点数N3=C3m3,m3是邻域半径ε3为0.2 m时所有行道树点的平均邻域点数,C3为常数,取值0.2~0.5。每棵单株行道树聚类后将聚类簇中点云数目最多的子簇作为该株行道树的主体部分,保留其行道树标签,其余子簇取消标签。
2)以行道树簇中所有分配行道树标签的点云为训练集,采用KNN分类器为未标记的点云分配标签,KNN的k值设置为10。
3)将KNN重新分配标签后此行道树簇内所有点的标签与粗分割后分配的标签进行比较,如果相同,完成行道树的细分割,否则,对分配标签后的行道树簇重新执行步骤1)—3)。
2 结果与分析
2.1 行道树点云划分结果
实验设备为搭载Windows 11 64位操作系统的计算机,运行内存16 GB,CPU为Intel i9-12900H,GPU为NVIDIA GeForce RTX 3060,GPU加速为CUDA 11.5+cuDNN 8.3.1。使用Spyder设计程序。
采集的原始点云数据共计60 063 929个点,采用基于距离的平均距离密度表示法来估算点云密度,点云密度为12.63,若直接对原始点云进行处理,效率过低,选择对原始点云数据使用最远点采样(farthest point sampling,FPS)[28]进行下采样。FPS是在点云中迭代选取M个点云进行下采样,首先,创建一个空集合,从点云中随机选取一点加入集合,之后,分别计算点云剩余的各点与当前已选取集合中点的最小距离,选取最小距离中的最大值所对应的点加入集合,迭代直至有M个点加入集合结束。FPS下采样可以尽可能地保证采样后样本的均匀性,采用FPS将原始点云数据下采样至10 000 000个点。
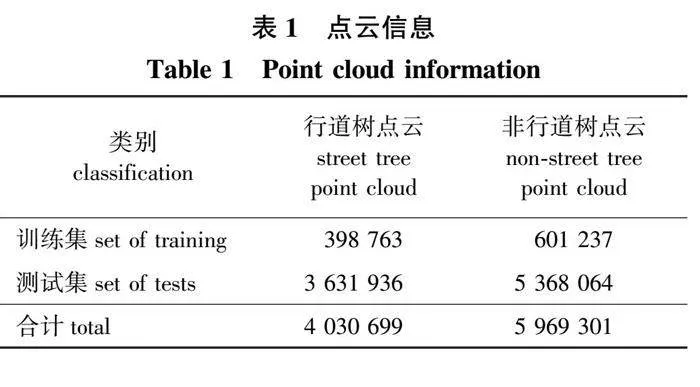
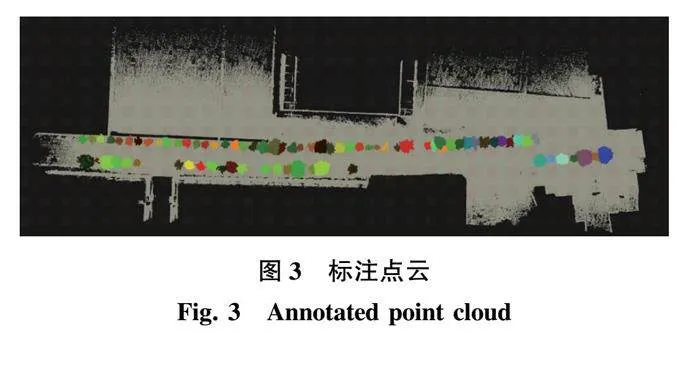
FPS下采样后,使用CloudCompare为下采样得到的点云中道路两侧的树木进行实例标注,为每棵行道树分配唯一标签,实例标注后的点云如图3所示,标注好的点云包含行道树与非行道树两个类别,其中行道树的标签数共计77个。按1∶9的比例将标注好的点云数据随机划分为训练集与测试集,划分后的点云具体信息如表1所示。
2.2 行道树点云检测器训练
行道树单木分割是在行道树点云检测出的结果上进行的,行道树点云检测的精度对单木分割的精度影响较大,因此需要对行道树点云检测器的精度进行测试。实验采用随机森林分类器在训练集上训练行道树点云检测器,训练完成后使用该行道树检测器在测试集上进行测试并对检测精度进行评价。
使用Python中的sklearn库调用随机森林分类器训练行道树点云检测器,设置随机森林分类器的决策树个数为10,其余参数为默认参数,训练完成后在测试集上进行测试,测试结果的精确度、召回率和F1分数分别为0.963 7、0.976 9、0.970 3,表明得到的检测器可以准确识别点云中的行道树点云。使用该行道树点云检测器对整个点云进行行道树点云识别,识别结果如图4所示,从图4中可以观察到绝大部分真实行道树点云能够被行道树检测器识别出来,尽管墙壁及地面存在部分被误检测为行道树点云的情况,但此类被误检测点云分布较为分散,可以通过行道树点云聚类将其滤除。
2.3 细分割精度测试
为实现行道树的单木分割,使用分割平面将包含多棵行道树的行道树簇粗分割为一棵棵单株行道树。然而采用分割平面会导致分割出的单株行道树的树枝末梢存在误分割,采用细分割的方法对这部分误分割进行优化。为测试细分割对粗分割结果的优化效果,设置最小邻域点数N1、N3和切片个数N的值分别为100、10和6,使用精确度Pr、召回率Re和F1分数对粗细分割后的结果分别进行评价。实例分割下,重新定义PT为预测为行道树点云实例且真实为行道树点云实例的点数,PF为预测为行道树点云实例但不是行道树点云实例的点数,NF为预测不是行道树点云实例但真实为行道树点云实例的点数。
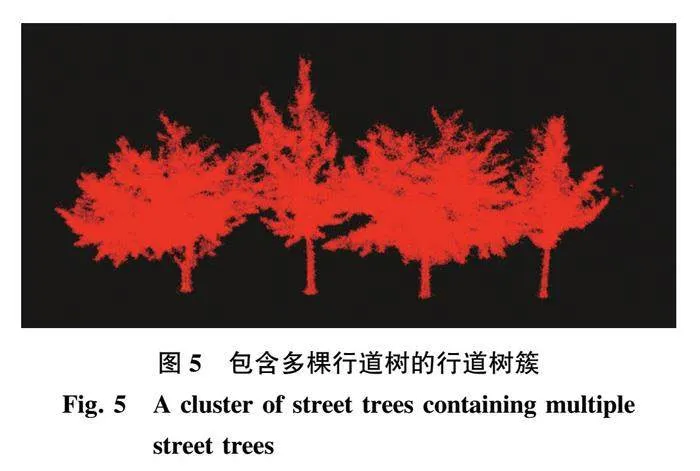
粗细分割前需要先进行行道树点云聚类,采用DBSCAN算法对行道树点云聚类,由于部分行道树的树冠之间存在重叠,因此得到的行道树簇存在包含单棵行道树和多棵行道树两种情况,包含多棵行道树的行道树簇侧视图如图5所示。由于行道树间的树冠相互重叠,导致这几棵行道树被聚类为1个行道树簇。
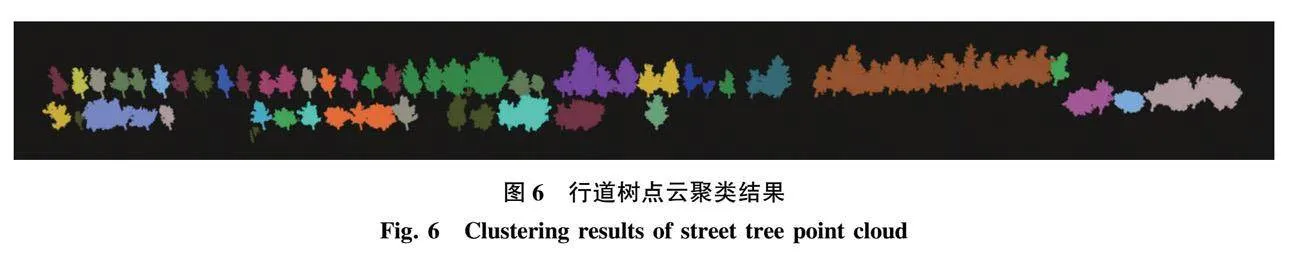
行道树点云聚类后,经过筛选共得到43个行道树簇,如图6所示。其中包含多棵行道树的行道
树簇15个,仅有1棵行道树的行道树簇26个,被误检为行道树簇的聚类簇2个,表明使用DBSCAN聚类并筛选行道树簇的方法,可以有效对行道树点云聚类,并去除大部分被误分割为行道树点云的非行道树点云,进而提高单木分割的精度。
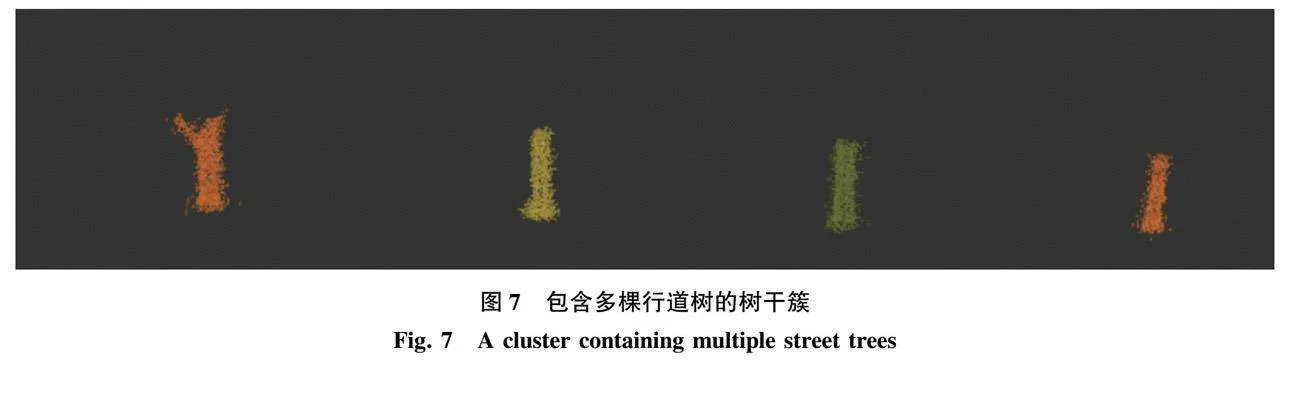
对上面得到的43个行道树簇进行粗分割,首先,检测行道树簇的树干簇,提取行道树簇中高程距离最低点0~1.4 m的所有点云,对其使用DBSCAN算法进行聚类,包含多棵行道树的行道树簇提取点云聚类后的结果如图7所示。
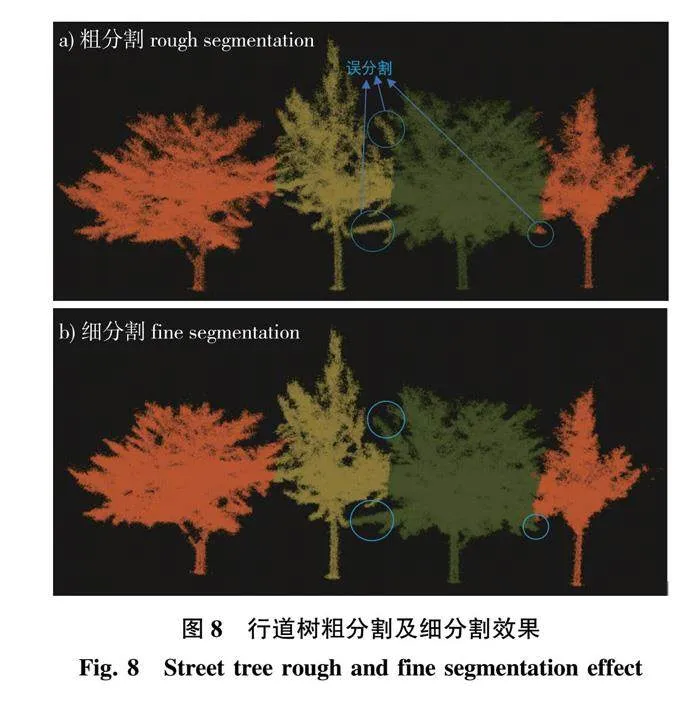
对于包含多棵行道树的行道树簇依据检测到的树干簇的位置进行粗分割,粗分割后的效果如图8所示,树冠重叠的相邻行道树能够准确分割开来,但由于行道树间树冠重叠部位树枝末梢相互交错,仅采用分割平面进行垂直分割难以将行道树间的树枝末梢很好地分离开来,相互交错的树枝末梢会被切割成孤立的点云簇且被错误归类到相邻行道树,导致出现如图8a蓝圈内所示的误分割。
最后,对粗分割下的误分割使用细分割进行优化,细分割后的效果如图8b所示,可以观察到树枝末梢被误分割的几处点云细分割后得到了正确归类。
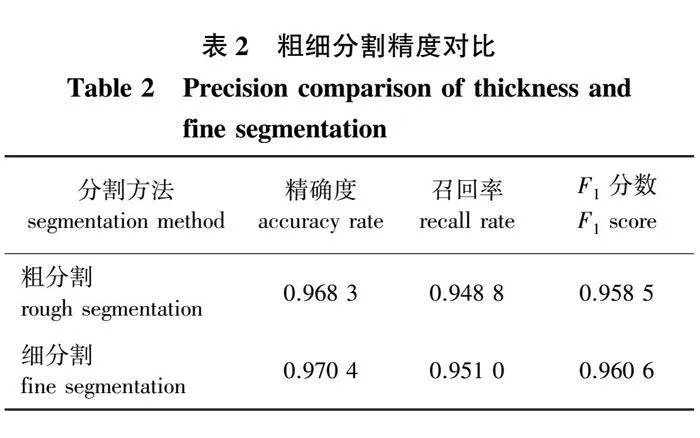
粗细分割下的精度结果如表2所示,细分割后的结果比粗分割在精确度、召回率和F1分数上分别提升了0.021、0.022、0.021,表明细分割可以有效对树枝末梢部位的误分割进行优化。
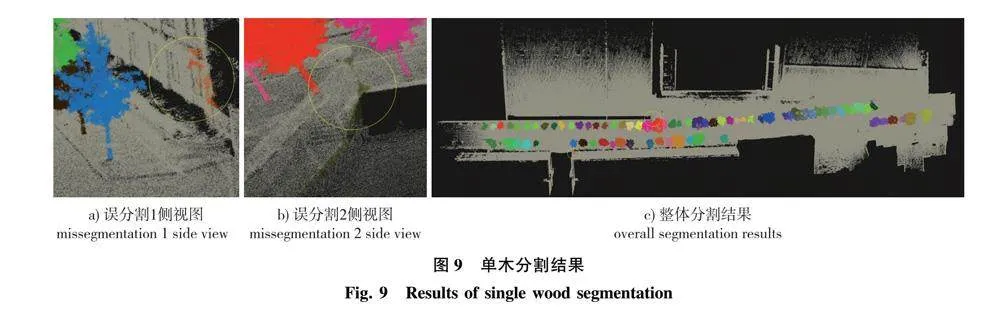
细分割后的整体单木分割结果如图9c所示,点云中77棵行道树全部检出且树与树之间边界分割准确。在黄圈内标出的两处被误分割的聚类簇为之前被误检为行道树簇的2个聚类簇,其侧视图分别如图9a、9b所示,观察后可发现,这两处误分割皆位于墙角部分。说明墙角部分的点云较容易被误识别为行道树点云,同时由于墙壁一般都很高,因此墙角被误识别的非行道树点云聚类后会出现聚类簇高度差大于3 m的情况。
2.4 算法对比
文献[21]与文献[22]都属于先识别再分割的方法,与本研究方法相似,因此选择将本研究的方法与文献[21]与文献[22]的方法进行对比。文献[21]的方法先识别点云中的行道树,之后将识别到的行道树点云投影到最优平面得到二维图像,然后在此图像上对行道树进行边缘检测,边缘检测完成后将图像上行道树边缘信息反投影到三维点云,实现对行道树的实例分割。文献[22]的方法先识别点云中的行道树,然后用MeanShift算法对行道树点云聚类实现单木分割。
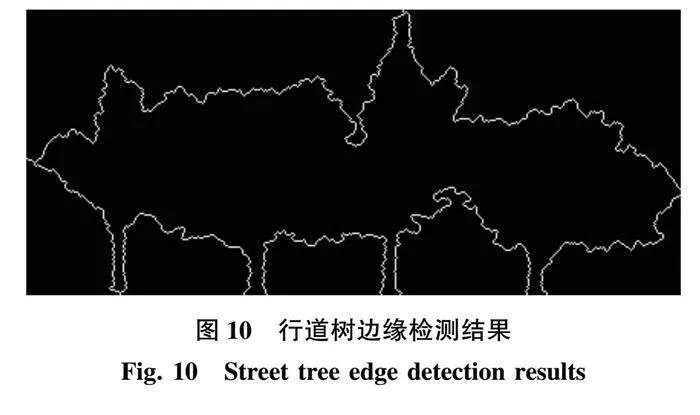
文献[21]的方法将图2中的4棵行道树投影为图像后边缘检测结果如图10所示。可以发现,文献[21]的方法对树冠高度重叠的相邻行道树,并不能使用边缘检测的方法在图像上将其分割开来,然而本研究点云数据中的多棵行道树间存在着树冠高度重叠的情况,因此文献[21]的方法无法对此点云中的行道树准确实现单木分割。
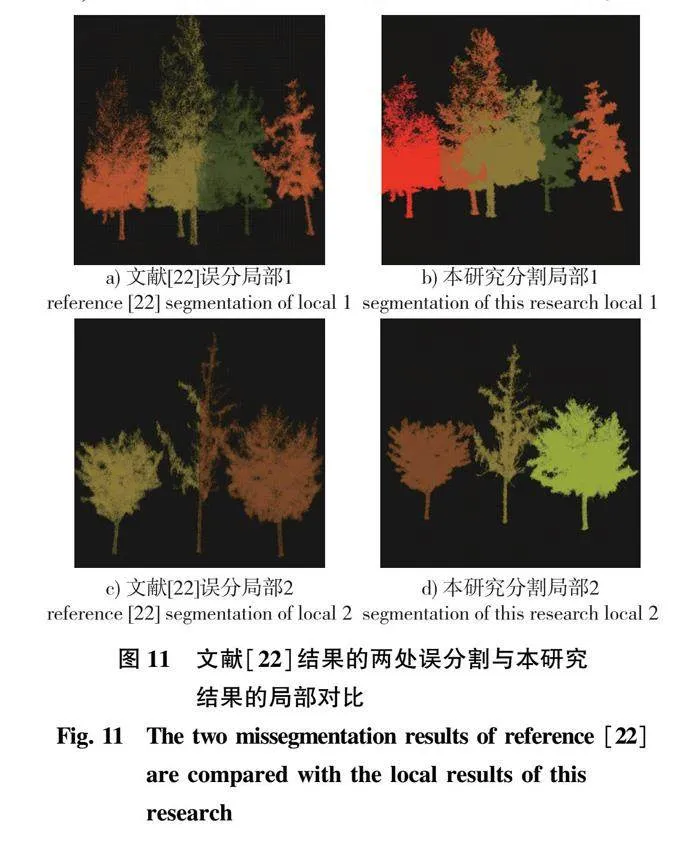
取文献[22]结果的两处误分割与本研究结果进行局部对比,如图11所示。可以发现,由于MeanShift算法是通过寻找局部密度最大点进行聚类的,因此对于含有多棵行道树的行道树簇中的瘦小行道树或树冠高度重叠的行道树,MeanShift并不能将其分割出来,相比之下,本研究方法通过检测树干来分割行道树,分割后再对分割结果进行优化,可以准确分割出行道树簇中的所有行道树。
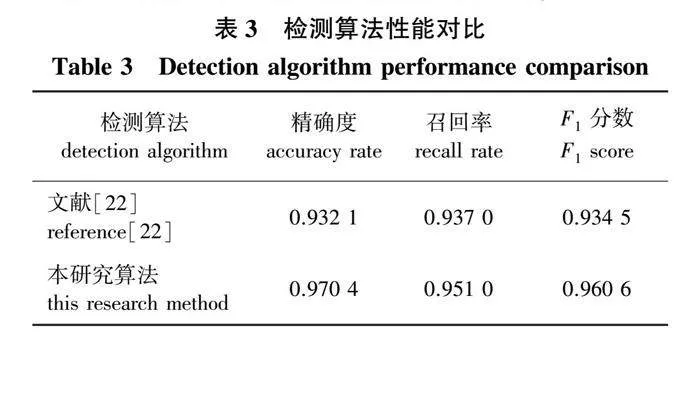
对本研究与文献[22]的结果进行精度对比,结果如表3所示,本研究方法相比文献[22]在精确度、召回率、F1分数上提升了0.038 3、0.014 0、0.026 1,证明了本研究方法相比文献[22]能够更准确地对点云中的行道树进行单木分割。
3 讨 论
针对复杂城市环境下的行道树单木分割问题,研究一种面向侧视MLS点云的行道树单木分割方法,建立能够准确对点云中的行道树进行单木分割的实例分割算法。
本研究通过随机森林分类器来对点云中的行道树进行识别,然而如墙壁、路灯等一些部位易被误识别为行道树点云,如果不对此部分误分割进行滤除,会影响接下来的单木分割精度,本研究采用先聚类再滤除的方法有效滤除了绝大部分被误分割的点云,降低了此类误分割对结果的影响。
本研究方法的精确度、召回率、F1分数分别为0.970 4、0.951 0、0.960 6,优于文献[21]与文献[22]。其原因是文献[21]与文献[22]皆是通过将行道树点云投影到二维图像上用曲线分割,损失了一个维度的信息,导致无法识别这个维度的树冠重叠。本研究针对行道树间树冠重叠难以分割的问题,将行道树点云投影到一维树点直方图上依据树干位置进行粗分割,可以有效将树冠高度重叠的相邻行道树分开。对于粗分割导致的行道树树枝末梢部位的误分割,在三维空间中采用细分割的方法对其进行优化,有效解决了三维空间树冠重叠的问题。
本研究方法在测试的数据集上得到了较高的精度,虽然此数据集的背景较为丰富,但由于本研究数据集中所测道路地面较为平坦,同一行道树簇中的所有行道树其树干在空间中大致处于同一高度。因此通过取聚类簇中距离最低点0~1.4 m的点云可以有效提取树干点云,但若街道地面坡度差异较大,则取聚类簇中距离最低点0~1.4 m的点云就不能保证有效提取树干点云。因此若要使用本研究方法对地面坡度差异较大的街道中的行道树实现准确分割,还需要对算法进行进一步的优化。
参考文献(reference):
[1]金小军,张军,杨凡,等.城市行道树生长健康状况与种植形式的相关性分析[J].城市建筑,2021,18(34):188-192.JIN X J,ZHANG J,YANG F,et al.Correlation analysis between the growth and health of urban street trees and their planting forms[J].Urban Archit,2021,18(34):188-192.DOI: 10.19892/j.cnki.csjz.2021.34.42.
[2]MORADPOUR M,AFSHIN H,FARHANIEH B.A numerical investigation of reactive air pollutant dispersion in urban street canyons with tree planting[J].Atmos Pollut Res,2017,8(2):253-266.DOI: 10.1016/j.apr.2016.09.002.
[3]商艳上,苏田,李臻,等.园林行道树复壮技术[J].现代农业科技,2021(12):176-177.SHANG Y S,SU T,LI Z,et al.Rejuvenation technology of garden street trees[J].Mod Agric Sci Technol,2021(12):176-177.DOI: 10.3969/j.issn.1007-5739.2021.12.071.
[4]许秋颖.城市行道树种植存在的问题及其养护管理措施[J].现代园艺,2019(22):180-181.XU Q Y.Problems existing in urban street tree planting and its maintenance and management measures[J].Xiandai Hortic,2019(22):180-181.DOI: 10.14051/j.cnki.xdyy.2019.22.116.
[5]刘智能,张红锋,徐瑾.西藏行道树资源调查与结构特征分析[J].四川大学学报(自然科学版),2019,56(1):173-181.LIU Z N,ZHANG H F,XU J.Survey and structural characteristics analysis of street trees in Tibet[J].J Sichuan Univ (Nat Sci Ed),2019,56(1):173-181.DOI: 10.3969/j.issn.0490-6756.2019.01.030.
[6]ROSELL J R,SANZ R.A review of methods and applications of the geometric characterization of tree crops in agricultural activities[J].Comput Electron Agric,2012,81:124-141.DOI: 10.1016/j.compag.2011.09.007.
[7]郝红科.基于机载激光雷达的森林参数反演研究[D].杨凌:西北农林科技大学,2019. HAO H K.Inversion of forest parameters using airborne LiDAR[D].Yangling:Northwest A amp; F University,2019.DOI: 10.27409/d.cnki.gxbnu.2019.000118.
[8]ZHEN Z,QUACKENBUSH L,ZHANG L J.Trends in automatic individual tree crown detection and delineation: evolution of LiDAR data[J].Remote Sens,2016,8(4):333.DOI: 10.3390/rs8040333.
[9]MARSELIS S M,ABERNETHY K,ALONSO A,et al.Evaluating the potential of full-waveform lidar for mapping pan-tropical tree species richness[J].Global Ecol Biogeogr,2020,29(10):1799-1816.DOI: 10.1111/geb.13158.
[10]JASKIERNIAK D,LUCIEER A,KUCZERA G,et al.Individual tree detection and crown delineation from unmanned aircraft system (UAS) LiDAR in structurally complex mixed species eucalypt forests[J].ISPRS J Photogramm Remote Sens,2021,171:171-187.DOI: 10.1016/j.isprsjprs.2020.10.016.
[11]SAFAIE A H,RASTIVEIS H,SHAMS A,et al.Automated street tree inventory using mobile LiDAR point clouds based on hough transform and active contours[J].ISPRS J Photogramm Remote Sens,2021,174:19-34.DOI: 10.1016/j.isprsjprs.2021.01.026.
[12]BIENERT A,GEORGI L,KUNZ M,et al.Automatic extraction and measurement of individual trees from mobile laser scanning point clouds of forests[J].Ann Bot,2021,128(6):787-804.DOI: 10.1093/aob/mcab087.
[13]XU S,SUN X Y,YUN J Y,et al.A new clustering-based framework to the stem estimation and growth fitting of street trees from mobile laser scanning data[J].IEEE J Sel Top Appl Earth Obs Remote Sens,1978,13:3240-3250.DOI: 10.1109/JSTARS.2020.3001978.
[14]LI J T,CHENG X J,XIAO Z H.A branch-trunk-constrained hierarchical clustering method for street trees individual extraction from mobile laser scanning point clouds[J].Measurement,2022,189:110440.DOI: 10.1016/j.measurement.2021.110440.
[15]LI J T,CHENG X J.Supervoxel-based extraction and classification of pole-like objects from MLS point cloud data[J].Opt Laser Technol,2022,146:107562.DOI: 10.1016/j.optlastec.2021.107562.
[16]HAO W,WANG Y H,LI Y,et al.Hierarchical extraction of pole-like objects from scene point clouds[J].Opt Eng,2018,57(8):1.DOI: 10.1117/1.oe.57.8.083106.
[17]WANG W Y,YU R,HUANG Q G,et al.SGPN:similarity group proposal network for 3D point cloud instance segmentation[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Salt Lake City,UT,USA.IEEE,2018:2569-2578.DOI: 10.1109/CVPR.2018.00272.
[18]PHAM Q H,NGUYEN T,HUA B S,et al.JSIS3D:joint semantic-instance segmentation of 3D point clouds with multi-task pointwise networks and multi-value conditional random fields[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Long Beach,CA,USA.IEEE,2019:8819-8828.DOI: 10.1109/CVPR.2019.00903.
[19]CHEN S Y,FANG J M,ZHANG Q,et al.Hierarchical aggregation for 3D instance segmentation[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV).Montreal,QC,Canada.IEEE,2021:15447-15456.DOI: 10.1109/ICCV48922.2021.01518.
[20]WANG Y,YU Y,LIU M. PointIT: a fast tracking framework based on 3D instance segmentation[J]." Computer Vision and Pattern Recognition,2019(37):102-110. DOI:10.1109/ICCAIS59597.2023.10382343.
[21]HUA Z Y,XU S,LIU Y G.Individual tree segmentation from side-view LiDAR point clouds of street trees using shadow-cut[J].Remote Sens,2022,14(22):5742.DOI: 10.3390/rs14225742.
[22]WEINMANN M,WEINMANN M,MALLET C,et al.A classification-segmentation framework for the detection of individual trees in dense MMS point cloud data acquired in urban areas[J].Remote Sens,2017,9(3):277.DOI: 10.3390/rs9030277.
[23]FUKUNAGA K,HOSTETLER L.The estimation of the gradient of a density function,with applications in pattern recognition[J].IEEE Trans Inf Theory,1975,21(1):32-40.DOI: 10.1109/TIT.1975.1055330.
[24]ESTER M,KRIEGEL H P,SANDER J,et al.A density-based algorithm for discovering clusters in large spatial databases with noise[C]//Proceedings of the Second International Conference on Knowledge Discovery and Data Mining.August,1996,Portland,Oregon.ACM,1996:226-231.DOI: 10.5555/3001460.3001507.
[25]于挺,杨军.基于K近邻卷积神经网络的点云模型识别与分类[J].激光与光电子学进展,2020,57(10):355-363.YU T,YANG J.Point cloud model recognition and classification based on K-nearest neighbor convolutional neural network[J].Laser Optoelectron Prog,2020,57(10):355-363.DOI: 10.3788/LOP57.101510.
[26]薛玉玺,李秋洁.基于移动激光扫描的行道树靶标实时检测[J]. 林业工程学报,2023,8(1):150-156. XUE Y X, LI Q J. Real-time detection of street tree targets based on mobile laser scanning[J]. J For Eng, 2023, 8(1): 150-156. DOI: 10.13360/j.issn.2096-1359.202205039.
[27]DAGHISTANI T,ALSHAMMARI R.Comparison of statistical logistic regression and Random Forest machine learning techniques in predicting diabetes[J].J Adv Inf Technol,2020:78-83.DOI: 10.12720/jait.11.2.78-83.
[28]QI C R, LI Y, HAO S, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space:, 10.48550/arXiv.1706.02413[P]. 2017. DOI:10.48550/arXiv.1706.02413.
(责任编辑 李燕文)
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国交通信息化(2021年8期)2021-11-02 05:26:02
汽车观察(2021年8期)2021-09-01 10:12:41
空间科学学报(2020年6期)2020-07-21 05:36:50
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
安徽农学通报(2017年1期)2017-02-15 17:49:06
软件(2016年7期)2017-02-07 15:54:01
南水北调与水利科技(2016年6期)2017-01-06 13:43:27
电脑知识与技术(2016年23期)2016-11-02 23:25:12