基于改进粒子群优化算法的机身室内指纹定位研究
2024-12-12 00:00:00毕杨张杨梅刘坤李军芳
航空科学技术 2024年12期


摘 要:飞机结构强度测试地面试验是飞机研制中不可或缺的环节,对保障人员安全、提升性能、降低成本具有重要意义。为在室内测试环境中提高测试效率并获取较高的机身定位精度性能,本文将双变异粒子群优化(DMPSO)算法融入室内无线定位技术,提出一种基于改进粒子群优化算法的飞机机身室内指纹定位方法,并通过试验验证其有效性。结果表明,相比传统的粒子群优化(PSO)算法和极大似然估计(MLE)算法,本文所提出的DMPSO定位方案在平均定位误差方面表现出色,平均定位误差为0.4341m,显著优于PSO的0.7263m和MLE的0.8089m。因此,DMPSO方法具有更高的定位精度和稳定性。本文的研究成果不仅为飞机结构强度测试地面试验提供了一种新的思路,同时也为室内无线定位技术提供了一种有效的定位精度提升方案。
关键词:机身结构强度测试; 室内定位; 改进粒子群优化算法; DMPSO; 定位误差
中图分类号:TP393 文献标识码:A DOI:10.19452/j.issn1007-5453.2024.12.007
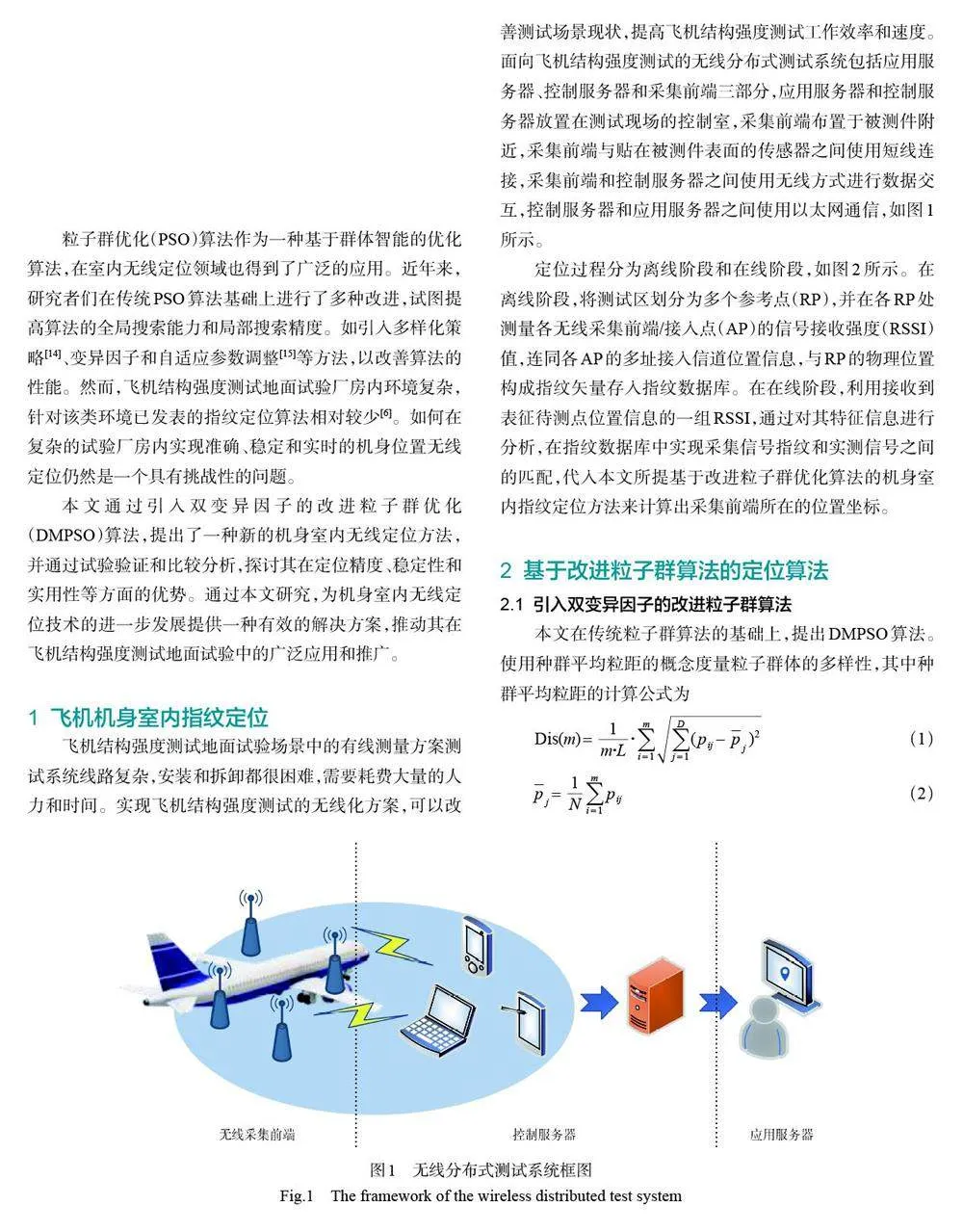
飞机机身结构强度地面测试是飞机研制流程中至关重要的一环,是确保飞机安全性、可靠性、经济性和舒适性的最为重要的研究、验证和鉴定手段,为飞机的成功研制和安全运维发挥着重要作用[1]。目前,传统的飞机机身结构强度地面检测仍然采用模拟信号远传的测试方法,即将传感器贴于机身表面并引出数据线进行数据采集[2-3]。虽然这种方法安全可靠,但是也存在传感器数量庞大、引线过多过长、现场布局布线复杂等缺点[4]。为保证传统测试网络的优势,并弥补其不足,可采用无线局域网络(WLAN)构建无线分布式测试系统来替代现有有线集中系统,实现数据的无线回收,提高飞机机身结构强度地面测试工作的效率和速度[5-6]。
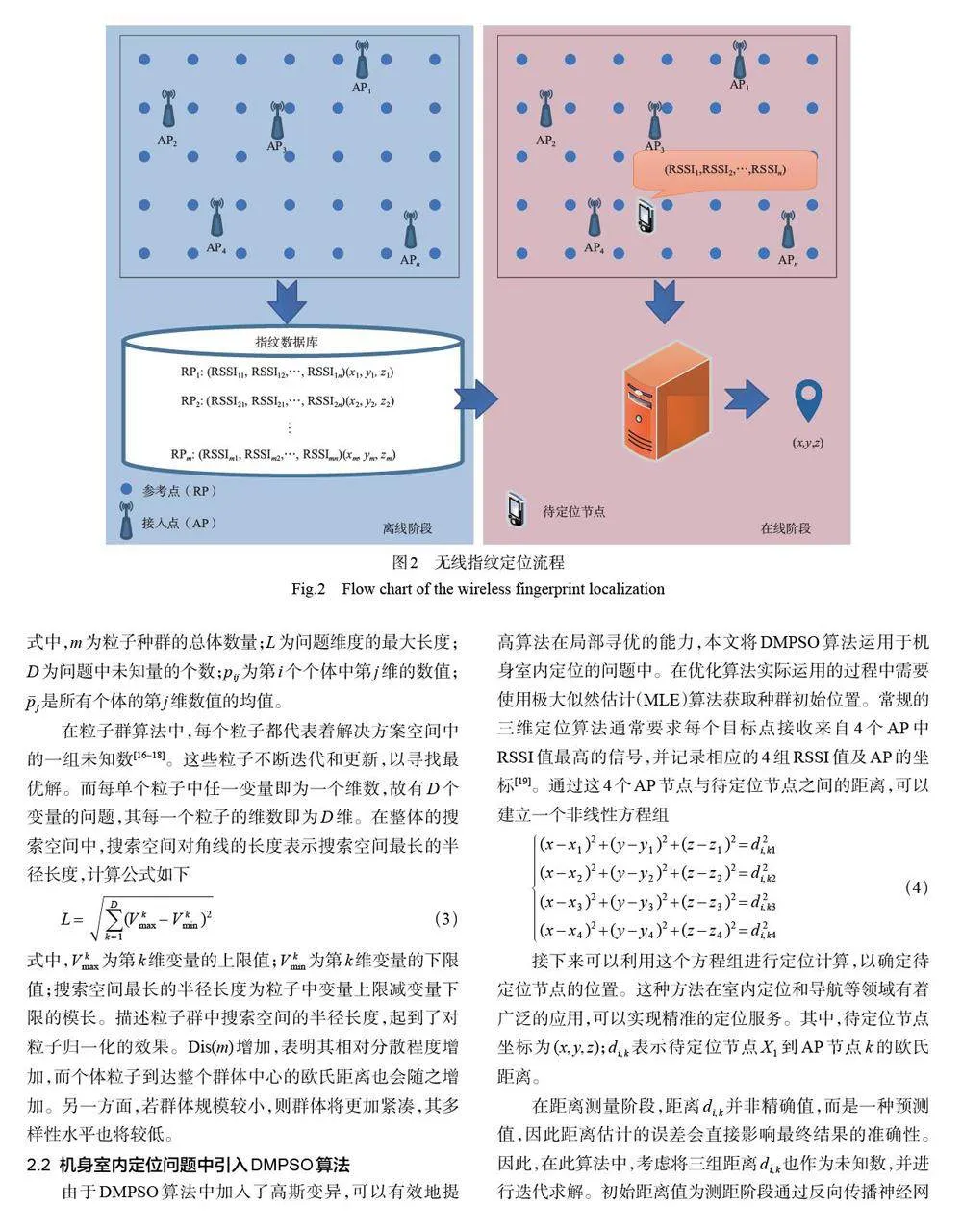
基于WLAN的室内定位技术是无线分布式测量系统的关键技术环节之一,可以通过测量和分析无线信号的特征,确定信号来源和位置,从而实现对飞机机身结构及其周围环境的实时监测和定位,提高测试效率和速度,减少测试时间和成本。位置指纹法又称为场景分析法,是基于WLAN室内定位技术中最易于实现的一种[7-9]。该方法在离线阶段通过在特定位置采集无线信号并提取信号特征建立位置指纹数据库,在在线阶段通过实测信号与指纹数据库的匹配进行定位。然而,受飞机机身的复杂性、测试厂房内的障碍物以及室内多径效应的影响,采集到的指纹信号在时间和空间维度上呈现出波动性,从而影响定位效果。
为解决室内无线定位效果不佳的问题,研究者们开展了广泛的研究。刘畅等[10]提出了基于超宽带(UWB)的室内定位系统平台的研究。该平台包括定位基站、定位标签和定位引擎,主要采用到达时间(TOA)算法。定位基站与定位标签和定位引擎通信,实现对人员和设备的精确定位。但UWB设备成本较高,且信号极易被遮挡。Jurdi 等[11]介绍了基于Wi-Fi 往返时间的室内定位系统WhereArtThou。该系统结合了Wi-Fi 基础设施的普遍性和UWB测距机制的准确性,使用扩展卡尔曼滤波器和随机行走运动模型进行定位。围绕煤矿井下环境特点,崔丽珍等[12]提出了一种基于动态指纹更新的指纹定位算法,定位精度可达2.6m,能够满足煤矿井下巷道的实时定位需求。龙智丰等[13]研究了全屋光纤(FTTR)WLAN场景下多个室内Wi-Fi 接入点的位置估计问题,并提出了一种利用已有的2.4GHz Wi-Fi 指纹数据集合成FTTR WLAN场景信道频率响应(CFR)图像的方法,基于CFR图像,开发了一种基于深度学习的定位算法,定位误差小于1m,但必须实现全屋光纤化,需要对现有场地设施进行改造。