机载激光雷达景像匹配辅助导航方法
2024-12-12 00:00:00王晓龙赵龙
航空科学技术 2024年12期


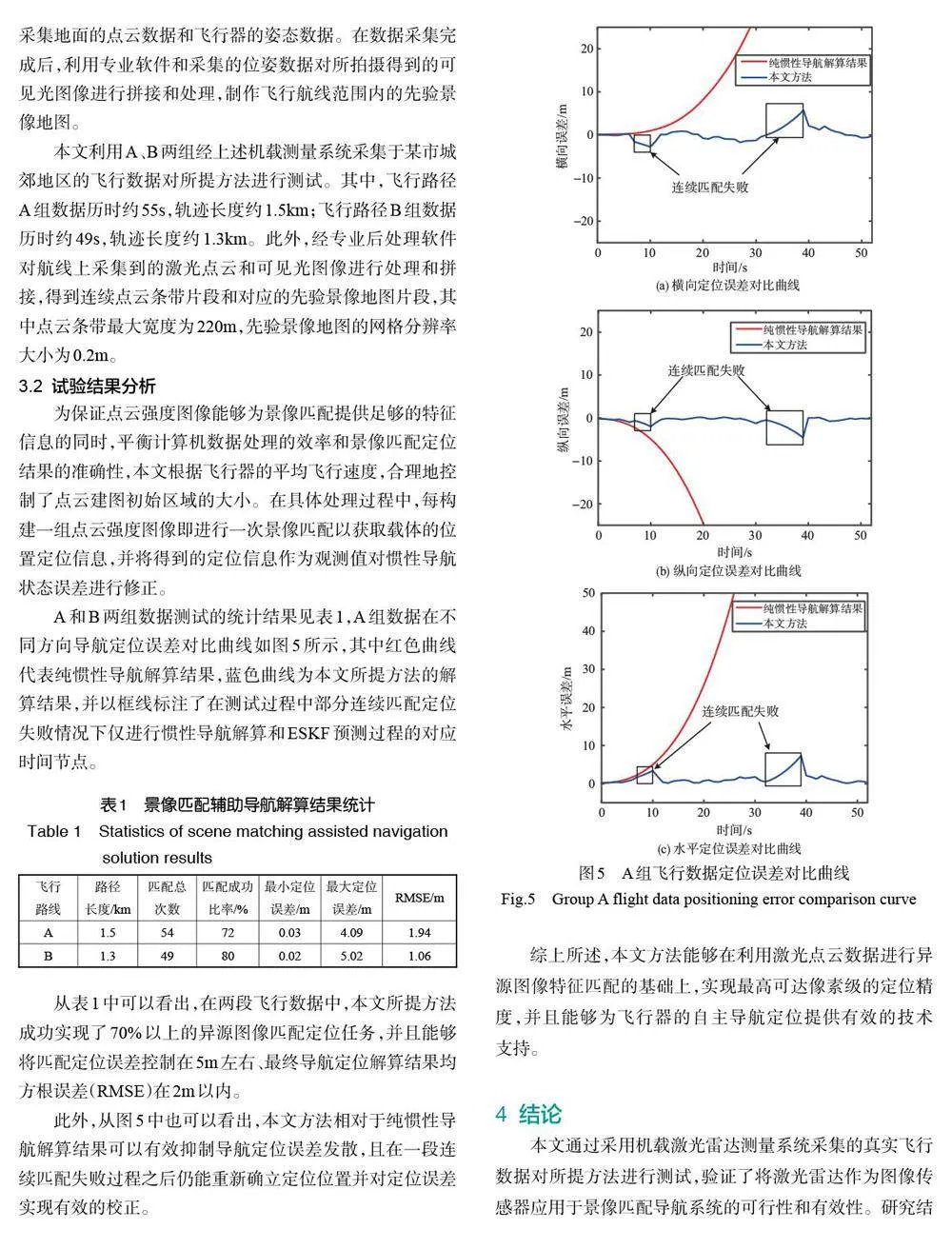
摘 要:以可见光视觉传感器方案为代表的景像匹配导航方法容易受光照、天气等外部环境变化影响,无法完成图像信息的有效采集,导致导航系统误差发散。为解决该问题,本文提出了一种机载激光雷达景像匹配辅助导航方法。首先,对激光点云数据进行预处理,拼接激光点云数据并提取点云强度信息构建激光点云强度图像;其次,基于异源图像特征匹配方法提取激光点云强度图像与先验基准地图中的特征信息进行特征匹配;最后,从特征匹配结果中提取匹配定位信息,将其引入惯性/景像匹配融合导航框架,进而校正惯性导航系统发散误差。经真实飞行数据测试验证,本文方法能有效抑制惯性导航系统的误差发散,其导航精度≤2m,并且可实现全天时条件下应用。
关键词:激光雷达; 图像匹配; 景像匹配导航; 惯性导航; 融合导航
中图分类号:V249 文献标识码:A DOI:10.19452/j.issn1007-5453.2024.12.005
景像匹配导航是一种采用视觉传感器获取飞行器周围或目标区域附近的航拍图像,通过与事先建立的基准地图(如数字正射影像图(DOM))匹配来获取飞行器位置数据的自主导航方法[1]。该类方法与传统的惯性导航、卫星导航等技术并行发展,并且可以作为这些技术的有效补充。通过赋予飞行器“视觉”能力,景像匹配导航利用图像间的匹配搜索和识别等技术,能够实现在卫星信号拒止等强电磁干扰对抗环境下飞行器的长航时、高精度导航需求。
根据所采用成像传感器方案的不同,现阶段景像匹配导航方法主要可以分为基于光学、红外和雷达图像三种类型[2]。其中,以“战斧”巡航导弹为代表的光学图像匹配导航技术能够通过直接成像,为系统提供高分辨率且清晰的目标图像[3]。然而,当应用于烟雾、尘埃等能见度差以及夜晚等环境中时,其性能会因为难以对环境有效成像出现显著下降;基于红外图像匹配技术的景像匹配导航方法虽然在昼夜和能见度低的条件下依然具备良好的工作能力和光电干扰抵抗能力,但该类方法所采用的成像传感器往往有效作用距离有限,难以实现远距离工作;采用合成孔径雷达(SAR)、干涉合成孔径雷达(InSAR)等传感器的雷达图像匹配导航技术相较于前两者在全天时、全天候,以及较高飞行高度的应用方面具有明显优势,但该类传感器在近距离成像方面同样存在一定局限性且易受干扰,同时由于该类设备的造价普遍较高,更是限制了其在更广范围机载导航系统中的应用[4]。
此外,近年来为提升景像匹配导航抗干扰能力的改进算法也不断涌现[5-7]。Zhao Chunhui 等[8]在利用视觉里程计对飞行器帧间连续相对运动进行估计的同时,通过在景像匹配可用区域利用图像匹配获取飞行器绝对定位信息,并将其作为辅助定位信息消除里程计的积累误差进而实现连续高精度导航。Wang Huaxia 等[9]则利用在不同日期和时间采集的数字地表模型(DSM)制备基准阴影地图,通过提取航拍图与基准图中的阴影信息并将其作为一种新的景像匹配稳定特征,增强了景像匹配方法在光线变化环境中的鲁棒性。
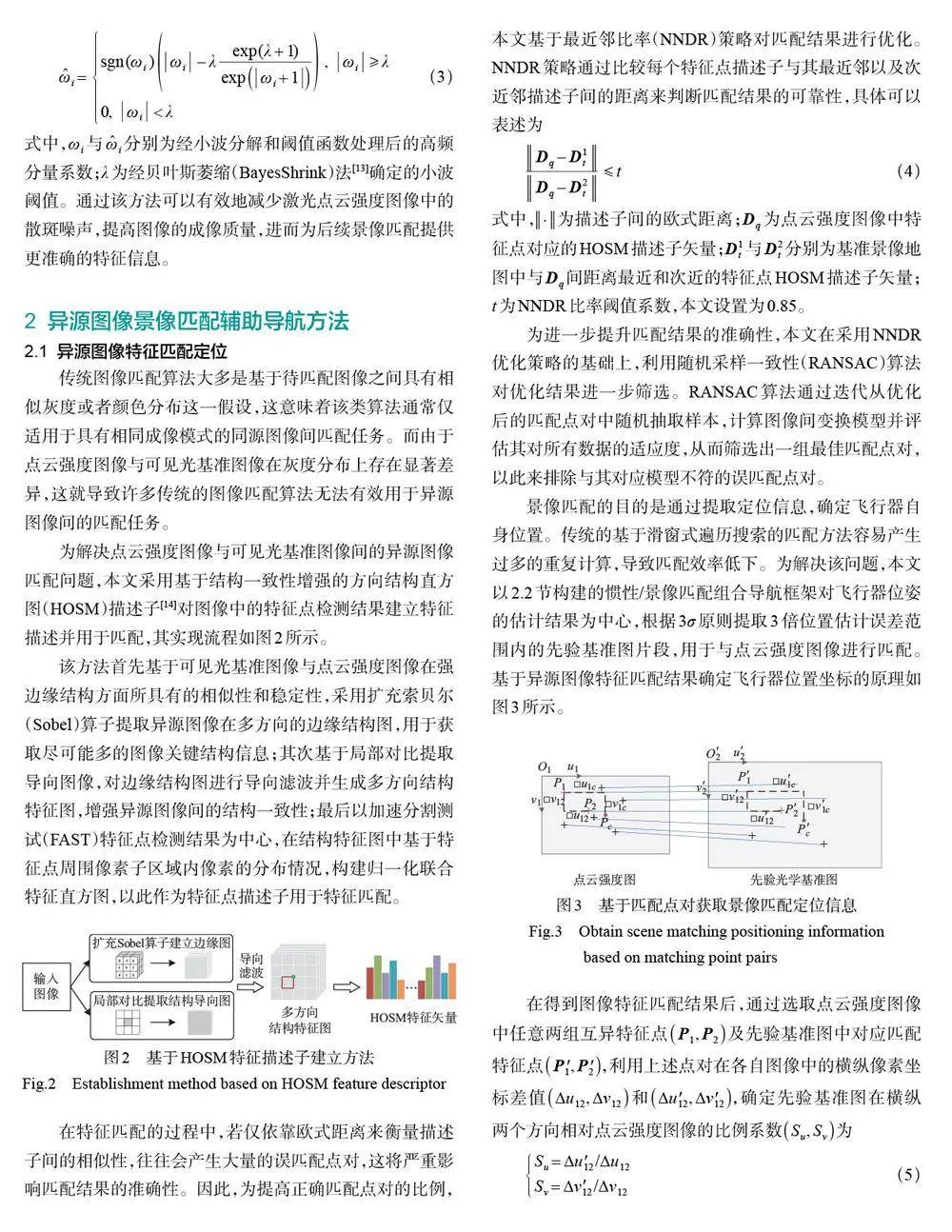
随着传感器技术的不断改进,激光雷达作为一种主动成像测量传感器,在弹载末段制导和大地测绘等领域逐步得到广泛应用[10]。相较于被动成像传感器,激光雷达具备抗干扰能力强、信息量大等特点,能够直接获取三维空间分布信息。然而,尽管激光雷达已在上述领域取得了显著成就,但在飞行器景像匹配导航方面的应用成果却相对较少。激光雷达通过发射激光线束获取包括距离图像和强度图像等信息在内的激光点云数据,其中强度图像和光学图像具有相同的机理和相似的性质,在异源图像匹配中表现出良好的可匹配性,因此将激光雷达应用于飞行器景像匹配导航具有重要价值。
因此,本文提出了一种机载激光雷达景像匹配辅助导航方法,首先通过拼接一定范围内的点云数据,构建激光点云强度地图;其次利用异源图像特征匹配方法,提取点云强度图像与可见光景像基准地图中的特征信息,完成特征匹配并对飞行器位置参数进行估计。通过构建惯性/景像匹配组合导航框架,将位置估计结果作为观测信息,校正惯性导航系统发散误差。在此基础上,通过真实飞行数据对本文所提出的方法进行测试,并与纯惯性导航解算结果以及惯性/卫星组合导航解算结果进行对比,验证了所提方法的有效性。