
高速公路视频监控技术研究
2024-12-10 00:00:00田竞辰
中国新技术新产品 2024年19期





摘 要:为了提升高速公路视频监控的效果,本文提出一种基于背景差分的车辆目标检测方法,先提出这种方法的流程,包括灰度化处理、均值去噪处理、背景差分处理。在背景差分处理中,针对非运动背景进行更新处理。在试验过程中,对简单背景、复杂背景、单车检测、多车检测的效果都进行验证,进一步证明了本文所提出方法对车辆检测的准确性要明显高于模板匹配法。
关键词:高速公路;视频监控;摄像机
中图分类号:U 41" " 文献标志码:A
目前,我国高速公路系统日益完善,高速公路里程不断增加、高速公路网络覆盖规模不断拓宽[1]。而随着高速公路建设质量提高,机动车的速度上限也不断提高。高速公路的发展现状为物资运输、旅客运输都提供了极大的便利,最大程度地提高了生活效率[2]。但是,高速公路系统也面临着极大的安全隐患。因为行驶速度过快,很难记录车行过程,所以一旦出现肇事情况就会导致生命和财产损失,甚至难以推进后续的理赔或司法过程[3]。因此,对高速公路进行有效监控是保障公路运输安全的重要课题。公路里程长、延伸距离远,国家层面已经在公路上布置了大量的监控设备,覆盖了整个高速公路系统。根据监控设备的有效监控距离,每隔一段里程就会配置一个监控设备。其中,以摄像机为主的视频监控设备得到了大规模使用。本文针对视频监控设计相应的监控算法,并通过试验测试进行验证。
1 基于背景差分的高速公路视频监控设计
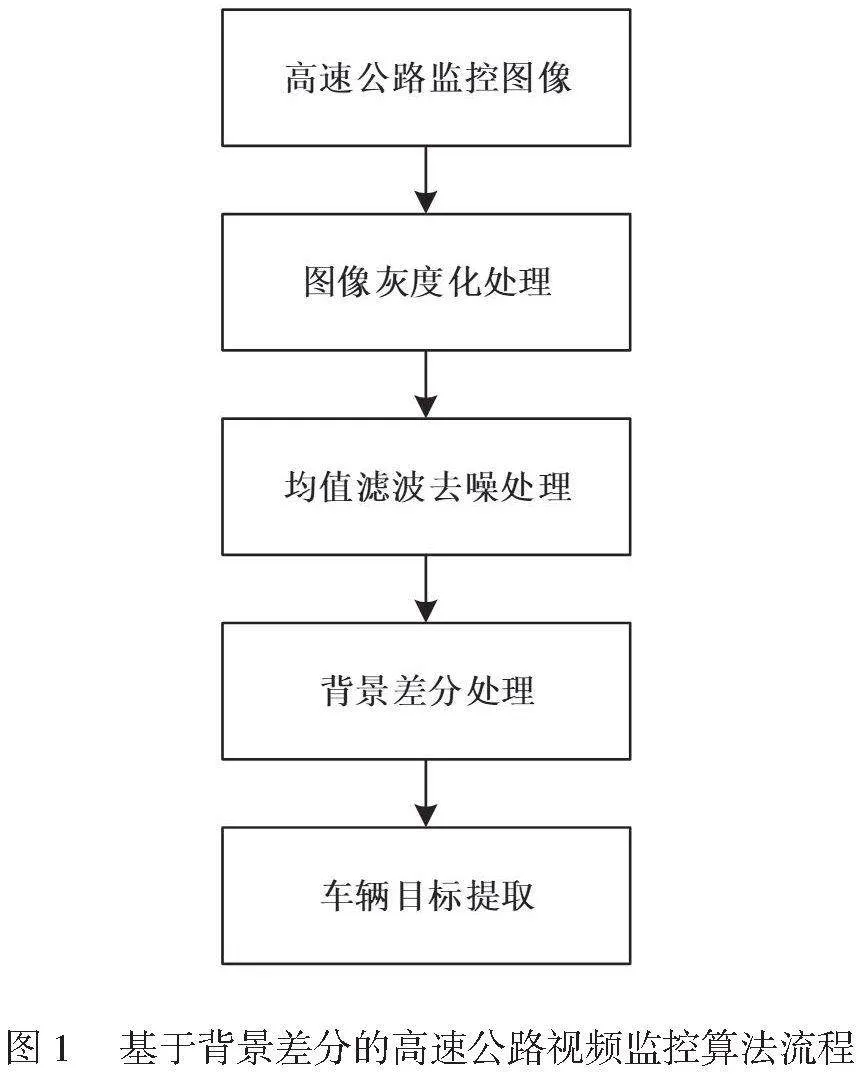
高速公路中的视频监控通过摄像机等拍摄的视频,提取特定车辆的位置,根据一定时间内车辆位置的变化判断车辆速度等信息,以确定其是否满足安全性要求。从技术性的角度看,高速公路上的车辆监控,属于运动目标检测问题。检测运动目标通常有3种方法:基于光流模型的检测方法、基于帧间差分的检测方法、基于背景差分的检测方法。本文将更新机制运用于其中,形成一种新的背景差分的检测方法。基于背景差分的高速公路视频监控算法的流程如图1所示。
在上述处理过程中,通常通过布置特定点位的摄像机来获取高速公路的视频监控图像。因此,摄像机是监控过程中最主要的传感器。摄像机拍摄的高速公路的视频图像通常都是彩色信息。彩色信息的图像存储空间大、需要更长的处理时间。因此,通常需要对其进行灰度化处理,以缩小其存储空间、缩短后续处理的时间。原始的监控图像因其拍摄条件、摄像器材等影响,会存在多种噪声,常见的有高斯噪声、随机噪声、椒盐噪声,需要采用特定的滤波器去除这些噪声。在得到灰度化、没有噪声的图像后,需要使用背景差分技术对车辆目标和背景进行分离。通过上述环节获得车辆目标信息后,就可以对车辆进行定位,测定车辆目标的速度等运动参数,达到预期的监控目的。
1.1 灰度处理
为了提高视频监控算法的执行速度,需要将摄像机排成的彩色图像转换成灰度图像。在各种数字图像的色彩表达中,灰度图像是一种非常特殊的图像。如果用RGB色彩模式来表征灰度图像,那么图像中每个像素的颜色信息的特征是R=G=B,体现出灰度效果。与彩色图像相比,灰度图像的存储空间减少了三分之二,相应的处理速度也随之提高。
对彩色图像进行灰度化的常用数学手段包括基于线性模型的和基于非线性模型的。基于非线性模型的处理方案如公式(1)所示。
式中:f为高速公路图像灰度化后的结果;R为高速公路图像中的红色通道分量;G为高速公路图像中的绿色通道分量;B为高速公路图像中的蓝色通道分量;max(R,G,B)为像素颜色信息的最大值;min(R,G,B)为像素颜色信息的最小值。
这种方法的转换速度快,但是误差较大。为了缩小误差,可以采用基于线性化模型处理,方案如公式(2)所示。
f=ω1R+ω2G+ω3B " " " " " " " " " " " (2)
式中:ω1、ω2、ω3为R、G、B这3个通道在像素灰度中所占的比例。根据经验,当ω1、ω2、ω3为0.299、0.587、0.114时,灰度化后的图像和原始图像的表达最接近。
1.2 去除噪声
在高速公路拍摄的图像,因各种原因都存在一定的噪声。去除高速公路图像噪声最常见的方法是采用均值滤波。
均值滤波技术需要采用一个滤波窗口,用窗口内所有像素的灰度数值之平均值代替要处理的像素。这种方法对随机噪声和椒盐噪声具有较好的处理效果,但是如果窗口尺寸选取不合理,就会导致图像模糊。因此,均值滤波除了要注意选择合理的窗口尺寸外,还要配合锐化技术消除模糊效应。
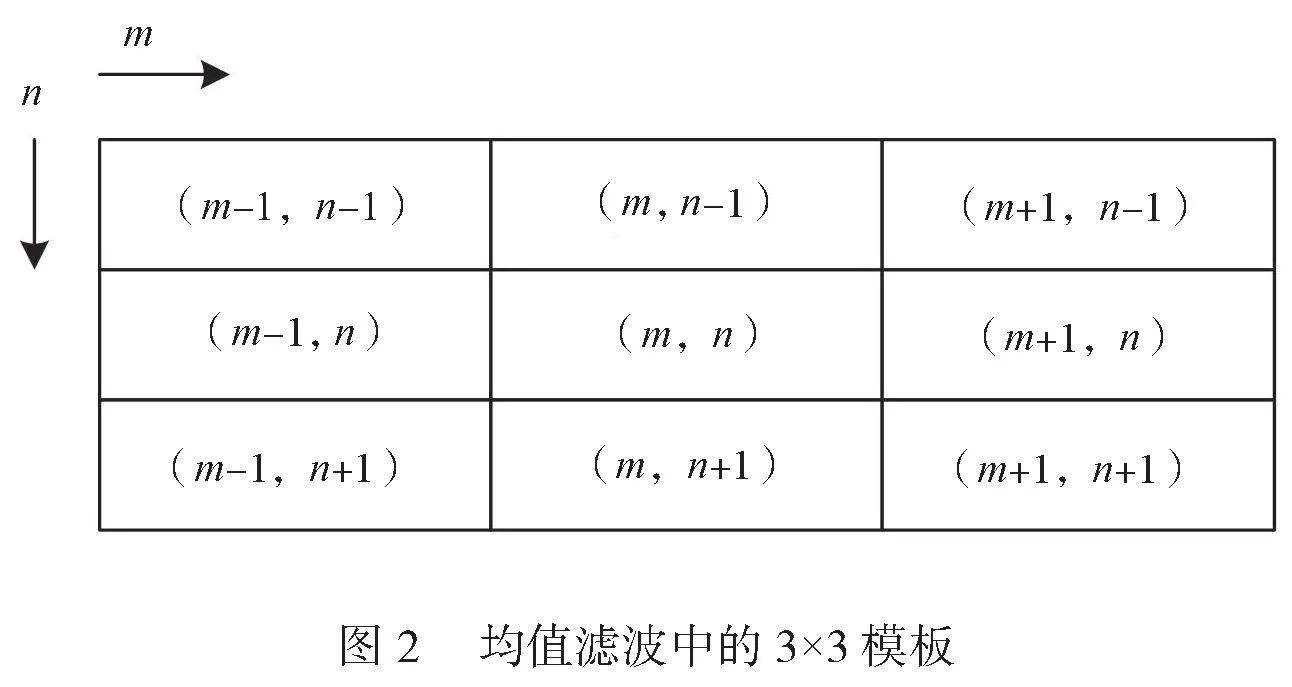
以一个3×3像素的平滑窗口为例,其进行均值处理的模板如图2所示。
从图2中可以看出,(m,n)就是待处理像素,这是一个以(m,n)为中心的3×3模板。根据均值滤波的原理,可以按照公式(3)计算(m,n)点的像素灰度。
h(m,n)={f(m-1,n-1)+f(m,n-1)+f(m+1,n-1)+f(m-1,n)+f(m,n)+f(m+1,n)+f(m-1,n+1)+f(m,n+1)+f(m+1,n+1)}/9 " " " " " " " " "(3)
式中:h(m,n)为高速公路图像滤波后像素灰度;f(m,n)为高速公路图像原始像素灰度;f(m-1,n-1)为模板中左上角的像素灰度;f(m,n-1)为模板中上方的像素灰度;f(m+1,n-1)为模板中右上角的像素灰度;f(m-1,n)为模板中左方的像素灰度;f(m+1,n)为模板中右方的像素灰度;f(m-1,n+1)为模板中左下角的像素灰度;f(m,n+1)为模板中下方的像素灰度;f(m+1,n+1)为模板中右下角的像素灰度。
1.3 背景差分
为了从高速公路图像中提取运动中的车辆,需要对车辆目标和复杂背景进行区分,其中,背景差分是一种有效的方法。采用背景差分来提取车辆目标,通常包括两个环节。第一个环节是对高速公路图像进行背景建模,这时要具体到每一帧监控图像,即以静止图像为研究的对象。第二个环节是将新拍摄的图像与背景建模图像进行差分处理,从而提取车辆目标。从执行流程上看,可以按照公式(4)来进行。
式中:D(x,y)为高速公路图像进行背景差分的结果;I(x,y)为新拍摄的高速公路图像;B(x,y)为高速公路背景建模图像;T为背景差分过程中的判断阈值。
从实际应用的角度看,背景差分需要在高速公路视频监控图像流持续供给的情况下,建立背景图像模型。需要注意的是,高速公路场景是有一定运动和改变的,因此背景图像也需要实时地更新和建模,才能保证背景差分和车辆检测的有效性。
1.4 背景更新机制
为了保证车辆检测的准确性,需要实时更新背景模型,如果实时更新背景,就需要耗费大量的计算资源,对高速公路视频监控系统的设备或硬件上的要求就更高。为了尽可能提升监控系统的性价比,采用对整个背景进行细分,只对非运动背景进行更新的方法,具体的处理过程如公式(5)所示。
式中:Bt-1(x,y)为t-1时刻高速公路背景建模图像;Tt(x,y)为t时刻新拍摄的高速公路图像;α为需要更新的比例。
由于在视频处理中,运动的目标常常会和阴影所重叠,因此就会导致阴影检测出现错误,并且会把目标当做阴影进行消除,造成后续就找不出目标的问题,跟踪出现严重的错误。因此,当对阴影进行消除时,需要充分考虑遮挡物和阴影之间的关系,遮挡物具有的形状特征最能体现它和阴影之间的关系,在目标检测阶段就去除阴影。
2 高速公路视频监控测试试验与结果分析
在本次研究工作中,针对高速公路视频监控图像,本文设计了基于背景差分的监测方法,给出了详细的算法原理和流程,包括图像的灰度化处理、均值滤波去噪、背景差分提取车辆目标。后续将通过试验对所提的方法性能进行测试。在高速公路上,高速行驶车辆的图像监控效果如图3所示。
图3中,图3(a)经过图像去噪、背景差分处理得到的车辆整体区域,如图3(b)所示,再进一步精确定位得到图3(c)。从这组试验的结果中可以明显看出,采用本文所提出的方法,可以对高速行驶的车辆目标进行有效提取,从而达到高速公路预期监控的目标。
第一组试验是一个简单情况下的车辆目标检测效果。在实际的情况中,高速公路上经常出现多车辆并行行驶或临近行驶的现象。因此,第二组试验进一步给出本文提出的背景差分检测方法,对多车辆复杂场景进行监测的效果,如图4所示。
在图4中,高速公路为双向七车道,在左侧车道上同时行驶两辆车,右侧车道行驶一辆车。在当前位置的监控设备拍摄场景内,3辆车同时出现,形成了较为复杂的情况。但在本文提出的背景差分方法的检测下,依然成功检测到3组车辆,这种算法将每个车辆目标自动标识为方框区域。
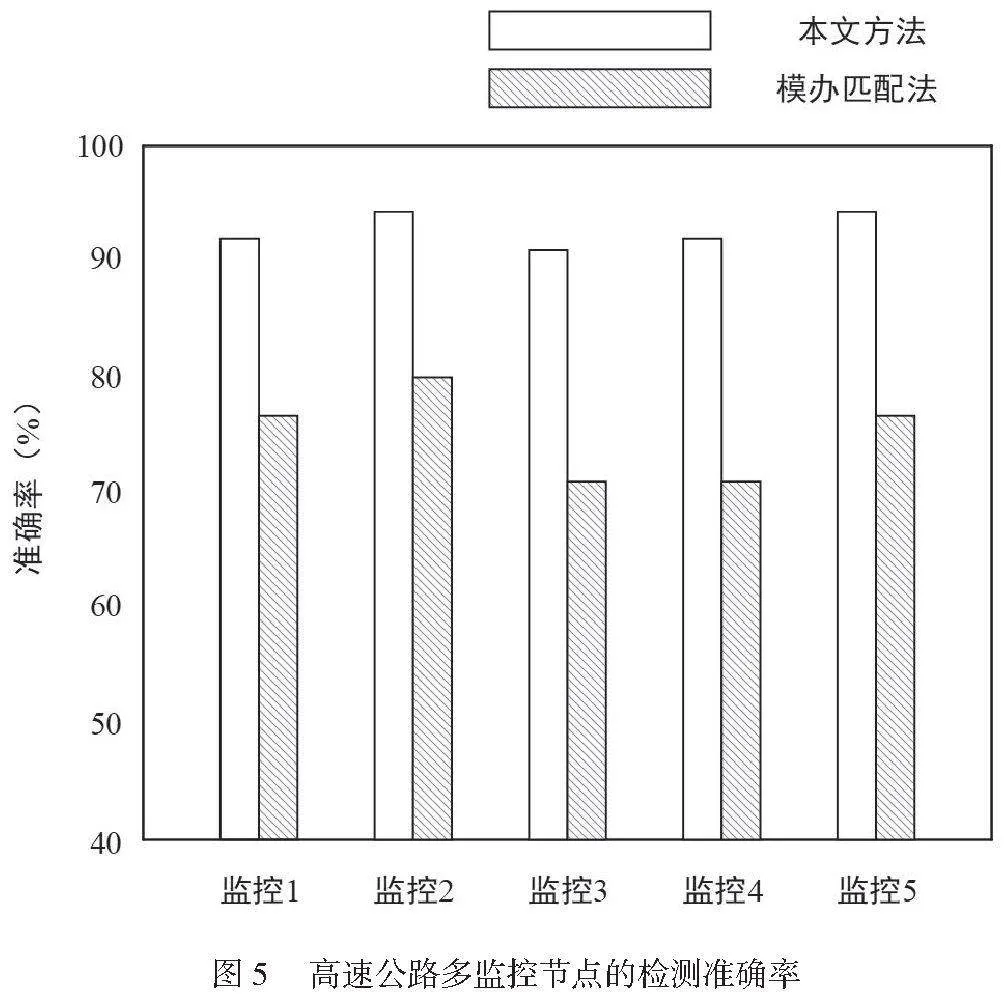
为了进一步验证本文提出的方法对高速公路视频监控的有效性,开始第三组测试试验,即采用背景差分检测算法对多个点位上的监控设备进行检测,观察车辆目标运行通过的检测准确率,结果如图5所示。
在图5中,在试验测试的高速公路上配置5个监控节点,在每个节点位置上都配置了监控设备,每个节点针对100帧图像进行车辆目标提取检测。在试验过程中,选择模板匹配法作为对比方法。从图中的对比结果可以明显看出,在5个监控位置上,本文提出的基于背景差分的检测方法都明显优于模板匹配法,进一步证明了本文方法的有效性。
3 结论
因为行驶速度过快,很难记录车行过程,一旦出现肇事就会导致生命和财产损失,且因无法有效记录导致后续的理赔或司法过程难以推进。所以,本文针对高速公路的监控问题提出了一种新的基于背景差分的检测方法。在这种方法中,采用线性化方法对原始图像进行灰度化处理,采用均值滤波方法对图像中的噪声进行去除,再采用基于背景差分的方法完成车辆目标提取。通过3组试验分别验证了本文提出方法对简单背景单车检测、复杂背景多车检测、多监控节点检测的有效性和准确率。结果表明,本文所提出的方法对提升高速公路监控效果具有重要实用价值。
参考文献
[1] 屈有山,田维坚,李英才. 基于并行隔帧差分光流场与灰度分析综合算法的运动目标检测[J]. 光子学报,2023,52(1):182-186.
[2] 李月. 基于改进帧差法和Camshift 算法的运动车辆检测与跟踪方法的研究[J]. 昆明理工大学学报,2017,32(5):1106-1111.
[3] 张泽旭,李金宗,李宁宁. 基于光流场分割和 Canny 边缘提取融合算法的运动目标检测[J]. 电子学报,2022,31(10):1299-1302.
猜你喜欢
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
科技创新与应用(2016年33期)2016-12-17 14:59:01
电脑知识与技术(2016年26期)2016-11-24 18:19:53
电脑知识与技术(2016年24期)2016-11-14 01:59:47
数字技术与应用(2016年9期)2016-11-09 23:10:41
中国交通信息化(2016年9期)2016-06-06 07:42:10
新闻前哨(2015年2期)2015-03-11 19:29:25
小说月刊(2014年4期)2014-04-23 08:52:20
