
变电站机器人巡检路径控制系统的设计
2024-12-06 00:00:00王进财张义虎伏学段旗城冯小龙
中国新技术新产品 2024年21期
关键词:蚁群算法





摘 要:本文针对传统人工巡检效率低、耗时长的问题,提出基于多目标任务的巡检路径规划方法,利用融合蚁群算法和JPS算法提升路径规划效率和质量。对JPS算法进行改进,优化路径转折角度,降低碰撞风险。仿真试验结果表明,改进后的JPS算法在缩短巡检路径、减少耗时和转弯次数方面表现优秀,显著提高巡检效率,保障巡检安全。本文为变电站智能巡检提供技术支持,提升智能电网运行的可靠性。
关键词:变电站巡检;路径控制;蚁群算法;JPS算法
中图分类号:TP 242" " " " " " " 文献标志码:A
随着智能电网的快速发展,变电站成为电力系统的关键设施。传统的人工巡检方式耗时耗力,不能全面、及时地发现潜在的安全隐患。因此,使用机器人的智能巡检模式成为研究热点[1]。智能巡检机器人对变电站设备进行自主、高效巡检,机器人巡检的核心是路径规划,即巡检机器人根据变电站的复杂环境,结合当前位置和巡检目标位置规划1条最优的巡检路径,不仅需要保证巡检的全面性和准确性,还需要考虑路径的安全性、长度、光滑度以及转变数等因素,以提高巡检效率并降低能耗[2]。
本文从变电站巡检机器人路径控制的需求出发,分析巡检任务的特点,并提出基于多目标任务的巡检路径规划方法,融合蚁群算法[3]和跳跃点寻路(Jump Point Search,JPS)算法[4]探讨其在巡检路径规划方面的优化效果和性能提升。同时,本文对JPS算法进行改进,以适应变电站巡检的复杂环境,并利用仿真试验验证所提方法的有效性和可行性,优化巡检路径,降低巡检过程中的风险,提高巡检的可靠性和安全性。
1 变电站巡检路径控制需求
由于变电站内部设备设施布局复杂,变电站机器人巡检与一般的巡检要求不同,因此,本文针对变电站巡检特征分析了变电站巡检路径控制的关键需求。1)提高路径搜索效率,以保证巡检机器人能够迅速定位并遍历所有巡检点。2)优化巡检路径距离,规划最短路径来减少巡检的总路程,降低能耗。3)减少巡检过程中的转弯次数,并尽可能缩短巡检耗时,以提升巡检的整体效率。以上需求构成了路径控制系统设计的核心目标,利用智能化手段解决传统人工巡检方式中存在的效率低、耗时长等问题。
2 多目标任务巡检路径规划
2.1 蚁群算法
蚁群算法(Ant Colony Optimization,ACO)是一种模拟自然界中蚂蚁觅食行为的启发式优化算法,其原理来自蚂蚁在寻找食物源过程中释放并感知信息素的现象,蚂蚁会根据路径中信息素的浓度选择行走方向,并留下新的信息素以影响后续蚂蚁的决策,信息素浓度高的路径会逐渐被更多蚂蚁选择,形成1条最优路径。
在巡检路径规划中,构建一系列候选路径,确定每条路径的信息素浓度。当算法开始时,所有路径的信息素浓度相同。随后,算法模拟蚂蚁的觅食过程,在每次迭代过程中,蚂蚁根据各条路径的信息素浓度,参考启发式信息,例如路径长度、安全性等,选择1条路径进行遍历,并在遍历过的路径中释放新的信息素,算法也会根据一定的蒸发规则减少路径中的信息素浓度,以模拟信息素的消散过程。蚁群算法流程如图1所示。
蚁群算法在巡检机器人路径规划中的优势是其能够进行分布式计算、具有正反馈机制以及鲁棒性强等,经过多次迭代,算法能够逐渐收敛至1条相对较好的巡检路径。
2.2 JPS算法
由上文了解蚁群算法在变电站智能巡检路径控制系统中的应用,蚁群算法具有计算量大、收敛速度慢等局限性,在复杂的变电站巡检环境中需要较长的计算时间才能找到满意的解,因此将蚁群算法与其他算法相结合,以提高路径规划的效率和质量。变电站巡检具有复杂性和多样性,因此需要将不同算法的优势相结合。JPS算法是一种高效的路径搜索算法,其减少不必要的搜索节点,显著提升路径规划的效率,在变电站智能巡检路径控制系统中,JPS算法广泛应用于优化巡检路径。JPS算法的基本原理是识别路径中的“跳跃点”(Jump Points),需要对地图或环境进行预处理,以识别那些允许直接跳跃的特定位置,即跳跃点。这些跳跃点通常是路径中的关键点,其与周围环境存在特定关系,因此从该点出发可以跳过一定范围内的检查,直接跳转至下1个可能的点。例如,在直线路径中,除了起点和终点,中间的点可以视为跳跃点,因为巡检机器人无须逐个检查这些点,所以只需沿直线前进。在搜索过程中,JPS算法利用预处理得到跳跃点信息,从起始点开始逐步向目标点逼近。当到达一个节点时,会检查该节点是否为跳跃点,并且决定是直接跳转到下一个跳跃点,还是按照传统方式继续搜索周围的节点。采用这种方式可以减少搜索空间,提高搜索效率。
2.3 蚁群-JPS算法的融合
为了提高机器人巡检路径规划的效率,本文融合蚁群算法与JPS算法,融合算法结合了蚁群算法的全局搜索能力与JPS算法的高效搜索特点,在复杂环境中进行最优巡检路径规划。具体流程如图2所示。
2.3.1 步骤一:使用栅格法创建变电站环境地图并初始化参数
利用栅格法将变电站的环境划分为若干个小格子,每个格子代表环境中的1个区域。初始化蚁群算法和JPS算法所需的各项参数,包括信息素浓度、蒸发率、蚂蚁数量和迭代次数等。
2.3.2 步骤二:采用JPS算法生成初始化路径并更新初始信息素要素
利用JPS算法的高效搜索机制快速生成1条从起点至终点的初步巡检路径。该路径是蚁群算法的初始化路径,并在此基础上初始化信息素要素。为JPS算法生成的路径中的节点赋予较高的信息素浓度,引导蚁群算法在后续的迭代过程中优先探索这些区域。
2.3.3 步骤三:更新启发函数
在蚁群算法中,当选择路径时,启发函数生成蚂蚁的考虑因子。为了发挥JPS算法的优势,对启发函数进行相应调整,使其不仅考虑路径的长度,还考虑路径的安全性、光滑度以及是否包括跳跃点等因素。这样,蚂蚁在搜索过程中会倾向于选择那些既能够缩短路径长度,又能够满足安全性和其他要求的路径。
2.3.4 步骤四:蚂蚁移动与全局信息素更新
模拟蚂蚁的觅食行为,每只蚂蚁根据当前位置的信息素浓度和启发函数选择下一步的移动方向。当蚂蚁完成一次遍历后,根据路径的质量和长度更新路径中的信息素浓度。同时,根据JPS算法的结果对初始信息素浓度进行调整,以加快算法的收敛速度。
2.3.5 步骤五:迭代过程与最优路径输出
重复上述步骤,直至所有蚂蚁都到达终点或达到预设的最大迭代次数。在每次迭代结束后,根据所有蚂蚁的遍历结果更新全局信息素要素。当达到最大迭代次数时,以当前信息素浓度的最长路径作为最优巡检路径输出。融合算法能够充分发挥蚁群算法的全局搜索能力,并利用JPS算法的高效搜索特点在变电站的复杂环境中快速找到1条既能够满足巡检要求,又能够降低能耗、提升安全性的最优巡检路径。融合算法不仅提高了巡检效率,还降低了巡检过程中的安全风险,为变电站智能巡检提供了有力的技术支持。
3 改进JPS算法的应用
由于变电站内部设备布局紧凑,因此在路径规划的过程中,特别是当绕过设备或转角处时,如果路径转折角度过小,那么将增加巡检机器人与设备发生碰撞的风险,影响巡检任务顺利执行。因此,需要解决蚁群-JPS算法在变电站巡检路径规划中可能遇到的转折角度过小的问题,保证机器人能够安全通过,并减少不必要的碰撞风险。
3.1 转折角度优化
在JPS算法中,当确定1个跳跃点时,不仅考虑直线段的跳跃,还引入角度约束条件。当计算跳跃点时,评估从这个点到下一个可能的跳跃位置或目标位置所在的直线和当前路径之间的角度,如果夹角小于预设的安全角度阈值,那么调整跳跃策略,选择更安全的路径方向,保证转折角度足够大,避免与设备发生碰撞。
3.2 跳点处理优化
对JPS算法中的跳点进行精细化处理,不仅基于直线或直角关系确定跳点,还引入更复杂的几何计算,例如圆弧拟合等,使路径在转折处更加平滑,减少尖锐转角。
3.3 融合蚁群算法
将改进后的JPS算法与蚁群算法相结合,利用蚁群算法的全局搜索能力和正反馈机制,在JPS算法提供的高效搜索框架内进一步优化路径选择。在每次迭代中,蚁群算法根据路径中的信息素浓度和启发式信息,例如路径长度、安全性等,对JPS算法生成的候选路径进行评估和调整,逐步逼近最优解。在保持蚁群-JPS算法原有优势的基础上进一步提升巡检路径的安全性,减少碰撞风险,并优化路径的转折角度,使巡检机器人能够更加顺畅、安全地完成巡检任务。
在优化路径的过程中,并行状态是所有的设备所在点排列有用信息存在的状态。设蚂蚁k在巡检点的位置为Qk lm(t),表示蚂蚁当前在巡检点L选择行动至巡检点M的概率,如公式(1)所示。
(1)
式中:τα lm(t)为t时刻巡检点m和巡检点l路径中的信息素浓度;α为的相对重要程度;ηβ lm(t)为启发式因子;β为η的相对重要程度;s为求和公式中的变量;allowedk为蚂蚁k所能选择的下一个巡检点的集合。
全部巡查点的序列合集是蚂蚁对所有的巡查点都按照一定顺序检查一遍以后,蚂蚁在这个检查过程中所经过的路段。蚂蚁更新信息素公式如公式(2)、公式(3)所示。
τlm(t+1)=(1-ρ)τlm(t)+Δτlm(t) " " " "(2)
Δτlm(t)=∑k lm(t) " " " " " " " " " " " " " " " " " " " " " " " " "(3)
式中: τlm(t+1)为在t+1时刻巡检点m至l的信息素浓度;ρ为信息素的不同挥发程度,蚂蚁更新信息素在[0,1];τlm(t)为在t时刻巡检点m至l的信息素浓度;Δτlm(t)为蚂蚁k在t时刻的这个阶段在路径区间中释放的信息素的量,[l,m]为蚂蚁走过的巡检路径,如果蚂蚁选择的巡查路径在走过以后信息素浓度变大了,那么增加量为Δτlm;Δτk lm(t)为在t时刻巡检点m至l的信息素浓度的所有增量的和。
本文中信息素挥发方式的更新模型如公式(4)所示。
(4)
式中:Q为信息素含量;Lk为蚂蚁在巡检过程中所途经的路程距离总和;ank k passes thouth[l,m]为当蚂蚁k走过的巡检路径为[l,m]时;otherwise为其他情况。
在蚂蚁巡检的过程中,信息素不断发生变化,直至达到提前设置好的指标值后算法收敛停止,在使用所有的算法得到结果后发现采用蚁群算法得到的路径是最终解的最优路径。
4 仿真试验
4.1 试验方案
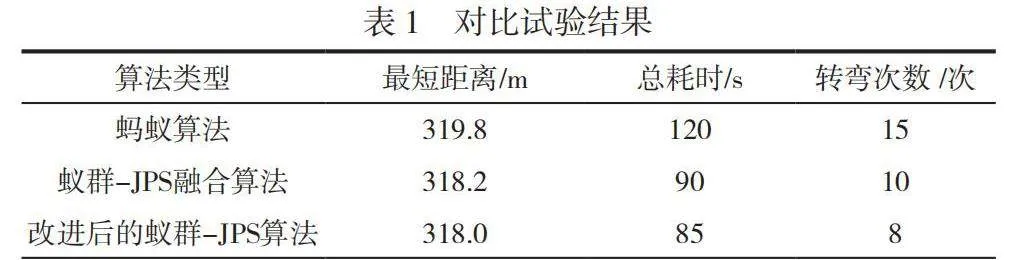
采用地图化方式对变电站环境进行处理,用栅格图表示变电站中需要巡检设备的布局。设置多组试验,分别采用蚂蚁算法、蚁群-JPS融合算法以及改进后的JPS算法进行巡检路径规划。试验的主要评价指标包括最短距离、总耗时以及转弯次数。每组试验重复多次,取平均值以保证结果的准确性。对比不同算法在相同环境中的性能表现,验证所提蚁群-JPS融合算法和改进JPS算法在巡检路径规划中的优化效果和可行性。
4.2 试验结果
根据试验方案,对蚂蚁算法、蚁群-JPS融合算法以及改进后的JPS算法在最短距离、总耗时和转弯次数3个指标方面的表现进行对比,试验结果见表1。
改进后的JPS算法在各项评价指标方面均表现出色,在缩短巡检路径长度、减少总耗时和转弯次数方面具有明显优势,与传统的蚂蚁算法相比,蚁群-JPS融合算法的性能更好,试验结果验证了改进后的蚁群-JPS算法在变电站智能巡检路径规划中的效果和可行性。
5 结语
本文针对变电站机器人巡检路径控制系统进行研究,采用智能化手段解决传统人工巡检方式存在的效率低、耗时长等问题,从变电站巡检机器人路径控制的需求出发,明确了路径控制系统设计的核心目标。本文提出基于多目标任务的巡检路径规划方法,采用融合蚁群算法和JPS算法研究其在巡检路径规划中的优化效果和性能提升。由于蚁群算法存在计算量大、收敛速度慢等局限性,在变电站复杂环境中表现不佳,因此本文融合蚁群算法与JPS算法,利用JPS算法的高效搜索特点对复杂环境中的最优巡检路径进行规划。本文还对JPS算法进行改进,以适应变电站巡检的复杂环境。引入角度约束条件和跳点精细化处理,保障路径在转折处更加安全、平滑,降低了与设备发生碰撞的风险,结合蚁群算法的全局搜索能力对改进后的JPS算法生成的候选路径进行评估和调整,逐步逼近最优解。试验结果表明,改进后的JPS算法在缩短巡检路径长度、减少总耗时和转弯次数方面表现出色,显著提高了巡检效率和安全性,为变电站智能巡检提供了有力的技术支持,推动了智能电网技术的发展。
参考文献
[1]朱道华,郭雅娟,韦磊,等.基于5G软件定义网络的变电站巡检智能控制系统设计[J].自动化技术与应用,2024,43(7):111-116.
[2]金涌涛,张恬波,季宇豪,等.变电站机器人巡检中设备目标动态捕捉识别技术研究[J].机械设计,2024,41(增刊1):159-164.
[3]赵思文,朱津欣.基于改进蚁群算法的电力电缆敷设路径规划方法[J].电气技术与经济,2024(6):322-323.
[4]方霞,俞宏图,熊齐.求解并行JSP作业车间调度问题的一种混合遗传算法[J].机电产品开发与创新,2021,34(1):78-79.
猜你喜欢
山东工业技术(2016年24期)2017-01-12 19:44:32
价值工程(2016年36期)2017-01-11 09:20:00
软件导刊(2016年11期)2016-12-22 21:53:31
软件导刊(2016年11期)2016-12-22 21:30:28
电脑知识与技术(2016年28期)2016-12-21 12:21:32
科技创新与应用(2016年31期)2016-12-03 04:01:54
科技视界(2016年18期)2016-11-03 00:32:24
电脑知识与技术(2016年18期)2016-11-02 18:56:47
电脑知识与技术(2016年22期)2016-10-31 20:38:41
中国科技博览(2016年15期)2016-08-23 01:19:36
