
基于抑制因子的FFBP成像算法
2024-12-04 00:00:00王贺伟李建军
中国新技术新产品 2024年11期



摘 要:快速因式分解后向投影(Fast Factorized Back Projection,FFBP)算法使用子孔径划分的方式进行成像,有效解决了后向投影(Back Projection,BP)算法耗时严重的问题。当各级子孔径图像融合时,需要进行坐标变换,时延近似,因此影响成像质量。本文基于相干因子提出适用于FFBP算法的抑制因子,提高了FFBP算法的成像质量。试验结果证明基于抑制因子加权的FFBP成像方法可以有效提升成像质量,运行时间和FFBP算法运行时间基本一致。
关键词:雷达成像;快速后向投影;相干因子;成像质量
中图分类号:TN 957" " " " " 文献标志码:A
后向投影(Back Projection,BP)算法源于计算机断层扫描(Computed Tomography, CT)技术[1],几乎适用于所有成像模式。但是其具有遍历特性,导致运算时间长,难以应用于实时性要求高的场景。快速因式分解后向投影(Fast Factorized Back Projection,FFBP)算法[2]为解决BP算法的加速问题奠定了基础,但是当各级子孔径图像融合时,FFBP算法通常需要进行坐标变换,时延近似,影响成像质量。在BP成像中,使用相干因子(Coherence Factor, CF)和相位相干因子(Phase Coherence Factor, PCF)对成像结果进行加权处理来提高成像质量[3],效果均较好。
FFBP的成像分辨率随迭代进行逐步提高,每个迭代过程都会引入时延差值,因此BP成像中的相干因子不适合作为加权因子,本文根据BP和FFBP的异同提出用于提高FFBP成像质量的加权因子,将融合后的子孔径视为不同通道,将不同通道迭代得到的像素值和的平方作为引入的抑制因子。为了提高成像质量,在FFBP算法的最后一次迭代前引入抑制因子,减少FFBP算法在迭代过程中由时延差值导致的误差。试验结果证明抑制因子可以有效提高FFBP算法的成像质量。
1 信号模型及成像算法
1.1 信号模型
调频连续波(Frequency Modulated Continuouse Wave, FMCW)是随着时间推移频率逐渐增加的信号,也称为线性频率调制或Chirp调制。其平面扫描模型如图1所示,以o为原点建立直角坐标系,雷达天线按照“Z”形在xoz面进行机械扫描,天线发射的FMCW信号如公式(1)所示。
s(t)=AejπKrt2ej2πfct " " " " " " " (1)
式中:t为发射信号的传播时间;A为目标点P(xp,yp,zp)的反射系数;fc为FMCW信号的载频;Kr为FMCW信号的调频斜率。
FMCW信号的持续时间比天线运动到下一个采样点所需时间短,因此天线按照“Z”形在xoz面进行持续扫描的过程可模拟为“停-走-停”的模型,在该模型中,水平等效天线个数为M,垂直等效天线个数为N,得到大小为M×N的回波信号数据矩阵。对回波信号进行去调频处理,忽略去调频处理后的残留相位误差,第m行n列的等效天线为 Pmn(xm,0,zn)。将接收的回波信号进行处理,得到差频信号,如公式(2)所示。
smn(t)=Ae-j2π(Krt+fc)τmn " " " (2)
式中:τmn为等效天线Pmn(xm,0,zn)与目标点P(xp,yp,zp)之间的延迟时间,令f=Krt+fc,如公式(3)所示。
smn(t)=Ae-j2πfτmn " " " " " (3)
1.2 后向投影
BP成像算法对成像区域进行划分,计算雷达回波在天线和各个像素之间的延时值,将每个像素点对应的回波数据和回波时延进行相干叠加,得到各个像素点的像素值,是一种在时域或频域进行“延时-求和”来得到精确聚焦成像结果的成像算法。
将成像区域均匀划分为x行z列,对每个像素点计算其与等效天线对应的时延(x,z),成像区域在等效天线Pmn(xm,0,zn)中的像素值smn(x,z)如公式(4)所示。
(4)
式中:Smn(x,z)为成像区域点(x,z)在等效天线中的像素值;(x,z)为等效天线Pmn(xm,0,zn)与成像区域第x行z列的像素点之间的计算时延。
当(x,z)=τmn时取得最大值,该通道在成像区域内会形成1条轨迹且必经过目标点。所有通道相干叠加后得到最终的BP成像结果 I(x,z),如公式(5)所示。
(5)
式中:m为等效天线水平所在位置;n为等效天线垂直所在位置;M为水平等效天线总数;N为垂直等效天线总数。
1.3 快速因式分解后向投影
当观测场景较大或者成像网格划分细密时,BP算法计算量十分庞大,无法满足实际应用需求。FFBP算法是BP算法经典加速算法之一,其利用局部近似处理和递归子孔径划分来进行加速计算。FFBP算法划分各个子孔径,以各个子孔径为原点建立极坐标系,在每个子孔径对应的极坐标系中进行成像,其分辨率低,生成对应的极坐标系子图像,迭代合并子图像,将全孔径高分辨率图像由极坐标系转换为直角坐标系[4]。
设FFBP迭代总次数为k,将水平等效天线个数M、垂直等效天线个数N进行因式分解,计算过程如公式(6)所示。
(6)
式中:mj、nj为第j=1,2...,k次迭代合并的天线数量和网格再次划分的数量。以等效天线Pmn(xm,0,zn)为原点建立极坐标与直角坐标系,如图2所示,目标点P在该直角坐标系中的位置为(xpmn,ypmn,zpmn),P1、P2为目标点P在xoy面、yoz面上的投影。
目标点P在相同原点建立的极坐标系中为Pmn(ρ, φ1, φ2),ρ为距离,φ1为方位角,φ2为高度角。原点相同的极坐标系和直角坐标系计算过程如公式(7)所示。
(7)
式中:xmn p、ymn p和zmn p分别为以等效天线Pmn(xm,0,zn)为原点建立的直角坐标系中目标点坐标。
在每个子孔径建立的极坐标系中分别使用BP算法进行初始低分辨率成像,以等效天线Pmn为原点建立的极坐标系中,成像点为Pmn,0(ρ, φ1, φ2),对应时延为,对应的初始像素值Imn,0如公式(8)所示。
Imn,0=Aej2πf " " " " "(8)
为了得到高分辨率图像,须进行多级子图像相干叠加融合,当第j次迭代时,等效天线面阵划分为子孔径,成像区域被划分为个网格,以第j次融合迭代得到的各个子孔径中心为原点建立极坐标系,在第p行、第q列子孔径为中心建立的极坐标系中,像素值Ipq,j(uj,vj) 计算过程如公式(9)所示。
(9)
式中:mj和nj分别为第j-1次迭代合并的天线数量和网格再次划分的数量;Ip'q',j-1(uj-1,vj-1)为第j-1次迭代得到的像素值;p'、q'为将要合并为第j次迭代中第p行、第q列子孔径的第j-1次迭代中的子孔径位置;∆tp'q',j-1为第j-1次迭代中第p'行、第q'列子孔径至像素点(uj-1,vj-1)与至像素点(uj,vj)之间的时延差值。
2 基于抑制因子加权的成像算法
2.1 基于相干因子加权的BP成像
为了提高BP算法成像质量,不同学者利用回波信号的幅度特性和相位特性分别提出了基于CF、PCF因子加权的成像方法。CF是一种基于接收阵列回波数据空间谱的自适应旁瓣抑制方法,是阵列数据相干能量与非相干能量和的比值,与目标距天线的距离和目标散射系数无关。BP成像中的CF(x,z)如公式(10)所示。
(10)
式中:分子为在延时-相加波束形成中得到的相干量;分母为MN倍的非相干量的和。在理想情况下,点散射中心的CF近似为1,在整个成像区域,CF为0~1,CF与散射信号的幅度变化相对独立。在图像中,CF较高的像素点聚焦质量很好,其需要保持幅度;CF较低的像素点聚焦质量较差,其幅值需要削弱[5-7]。加入相干因子的成像结果ICF(x,y)如公式(11)所示。
ICF(x,y)=I(x,y)·CF(x,y) " " " (11)
式中:I(x,y)为BP成像结果。
2.2 基于抑制因子加权的FFBP成像
为了提高FFBP算法成像质量,本文提出基于FFBP的抑制因子。FFBP算法的成像分辨率随迭代进行逐步提高,在每次迭代过程中都会引入时延差值,直接类比BP成像中的相干因子,将不同子孔径视为不同通道,效果不佳。
本文在FFBP算法的最后一次迭代前引入抑制因子,减少FFBP算法在迭代过程中由时延差值导致的误差,将不同通道迭代得到的像素值和的平方作为引入的抑制因子,在FFBP成像中k次迭代之前引入的抑制因子CFk-1(uk-1,vk-1)如公式(12)所示。
(12)
式中:mk和nk为第k次迭代合并的天线数量和网格再次划分的数量;Ip'q',k-1(uk-1,vk-1)为第k-1次迭代得到的像素值。
与BP成像中的相干因子加权方式不同,在FFBP成像中,须将抑制因子与每个融合后子孔径对应的图像进行加权,第k-1次迭代的加权后结果如公式(13)所示。
I'pq,k-1(uk-1,vk-1)=Ipq,k-1(uk-1,vk-1)·CFk-1(uk-1,vk-1)" " " " "(13)
将加权后的值I'pq,k-1(uk-1,vk-1)代入公式(9)进行最后一次迭代,得到最终的成像结果Ipq,k(uk,vk),如公式(14)所示。
(14)
3 试验仿真
为验证本文提出的基于抑制因子加权的FFBP成像方法的成像效果,将AWR1843雷达传感器放置在扫描架上进行平面扫描。发射信号调频斜率Kr为63.343 MHz/μs,中心频率fc为77 GHz,采样点数为256,采样频率fs为9.121 MHz。
扫描架水平运行速度为2 m/min,开发板信号采样间隔为18 ms,
天线间等效采集间隔为0.6 mm,水平采集360点后向下垂直位移2 mm继续采集,得到360个×100个等效面阵采集数据。
分别采集距离面阵0.31 m处的铁钳子和铁圆环数据,使用FFBP和基于抑制因子加权的FFBP对采集数据进行成像试验,编程软件为MATALB2021a,以目标所在位置为中心选取成像区域,成像区域网格数划分为4个×360个×100个,对应成像区域大小为0.16 m×2.00 m×2.16 m。2种方法分别运行20次,FFBP算法耗时2.238 8 s,基于抑制因子加权的FFBP成像方法耗时2.264 0 s。
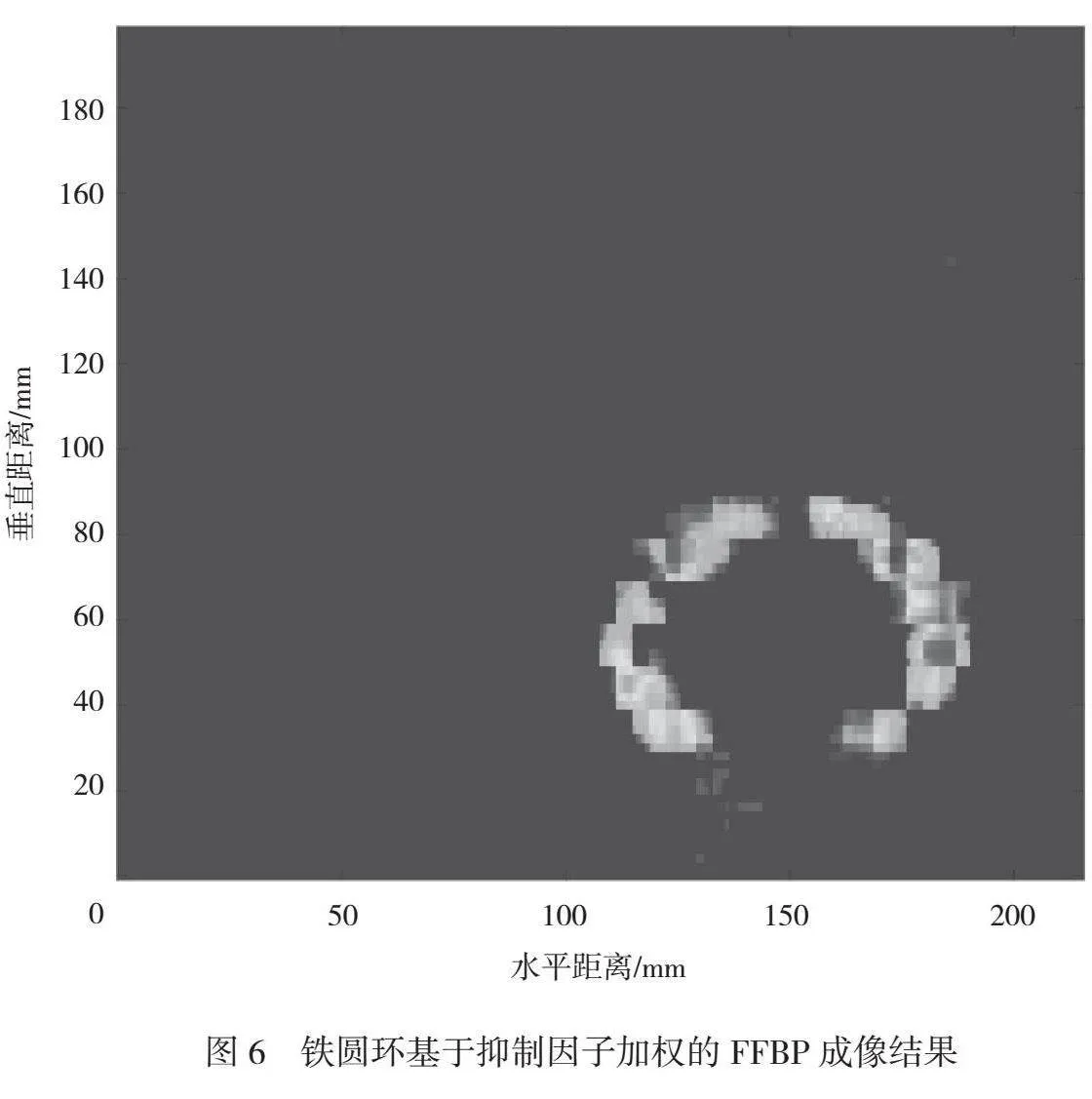
铁钳子 FFBP 成像结果如图3所示,铁钳子基于抑制因子加权的 FFBP成像结果如图 4 所示,图像动态显示范围均为-25 dB~0 dB。铁圆环的FFBP 成像结果如图5所示,铁圆环基于抑制因子加权的 FFBP 成像结果如图 6 所示,图像动态显示范围均为-25 dB~0 dB。
从图3~图6可以看出基于抑制因子加权的FFBP成像提升了成像质量,对FFBP成像中一些由近似、坐标转换等因素导致的误差抑制效果明显,成像耗时接近。
4 结论
FFBP算法为BP算法的加速算法,成像质量不高,为提升成像质量,本文提出基于抑制因子加权的FFBP成像算法。试验结果说明该算法运行时间基本相同,可以有效提升成像质量。本文抑制因子仅考虑与幅度有统计学意义的相干因子,将抑制因子放在最后一次迭代之前,后续可以进一步研究与相位有统计学意义的相位相干因子或者其他在BP成像中抑制效果不错的加权因子,也可以在坐标转换部分就对抑制因子进行加权。
参考文献
[1]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005.
[2]张磊,李浩林,邢孟道,等.快速后向投影合成孔径雷达成像的自聚焦方法[J].西安电子科技大学学报,2014,41(1):69-74.
[3]LI S,AMIN M,AN Q,et al.2-D coherence factor for sidelobe and ghost suppressions in radar imaging[J].IEEE Transactions on"antennas and propagation,2020,68(2):1204-1209.
[4]邢孟道,马鹏辉,楼屹杉,等.合成孔径雷达快速后向投影算法综述[J].雷达学报,2024,13(1):1-22.
[5]AN Q, HOORFAR A, ZHANG W, et al.Range coherence
factor for down range sidelobes suppression in radar imaging through
multilayered dielectric media[J].IEEE Access, 2019(7):66910-66918.
[6]晋良念,欧阳缮,周丽军.UWB MIMO穿墙雷达的阵列设计和成像方法[J].电子与信息学报,2012,34(7):1574-1580.
[7]宋叶江,崔振茂,安健飞,等.太赫兹稀疏阵列相干因子栅旁瓣抑制方法[J].红外与毫米波学报,2020,39(4):434-440.
