
蒸发线冷凝器PID自控调节初步探究
2024-12-04 00:00:00陈继钊
中国新技术新产品 2024年10期
关键词:冷凝器



摘 要:本文针对某厂低放射性废水蒸发系统运行存在预热器温度不稳定、蒸发器压力过高、液位不稳定、冷凝液产量不足、冷凝器出口温度不稳定、空气预热器积水渗漏、尾气系统凝结水量过多等问题,基于PLC控制系统的PID控制原理,结合冷凝器冷却水出口温度等参数要求,根据比例、积分、微分控制进行了分析,保证蒸发线冷凝器PID自控调节冷却水进口阀门,获得了满足蒸发工艺要求的控制参数,保证了某厂低放废水蒸发生产线的稳定运行,为国内同类型蒸发线稳定控制提供参考。
关键词:蒸发线;冷凝器;PID
中图分类号:TQ 05" 文献标志码:A
某厂采用蒸发浓缩工艺对大量低放射性废水进行处理,该工艺结合了PLC(可编程逻辑控制器)控制系统,当低放射性废水蒸发系统运行趋于稳定运行时,切换至PID反馈调节控制,以保证低放射性废水蒸发系统稳态运行[1]。
某厂低放废水蒸发生产线已运行三年多,能够满足生产运行的需求,但在运行中会存在预热器温度不稳定、蒸发器压力过高、液位不稳定、冷凝液产量不足、冷凝器出口温度不稳定、空气预热器积水渗漏、尾气系统凝结水量过多等问题,为解决这些问题,本文提出了自动改手动设想,或对冷凝器生产水出口工艺管道改进的办法,可解决二次蒸汽冷凝局部问题,但破坏了系统整体的平衡性,工艺管线改造耗时影响生产进度。PLC控制系统[2]在生产运行中具有先进性,其针对闭环的PID控制,在温度、压力、流量这一类连续变化的模拟量的控制中得到了广泛应用。本文针对冷凝器冷却水出口温度等PID自控调节参数设置进行初步探究,通过充分利用某蒸发线冷凝器换热面积,来解决二次蒸汽冷凝效果不佳、冷凝液产量偏低、冷凝器出口温度不稳定等问题。
1 PID控制原理及特点
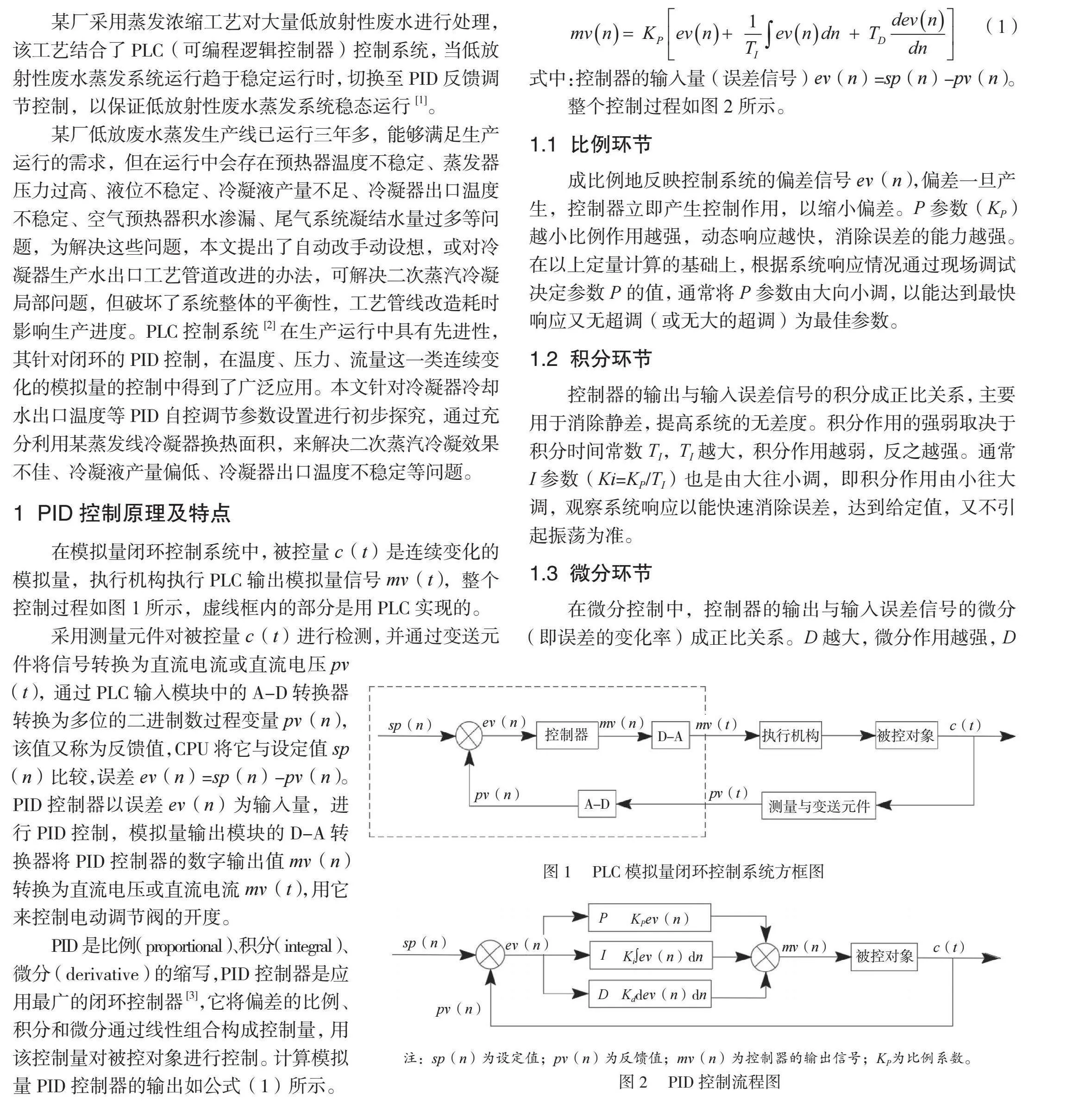
在模拟量闭环控制系统中,被控量c(t)是连续变化的模拟量,执行机构执行PLC输出模拟量信号mv(t),整个控制过程如图1所示,虚线框内的部分是用PLC实现的。
采用测量元件对被控量c(t)进行检测,并通过变送元件将信号转换为直流电流或直流电压pv(t),通过PLC输入模块中的A-D转换器转换为多位的二进制数过程变量pv(n),该值又称为反馈值,CPU将它与设定值sp(n)比较,误差ev(n)=sp(n)-pv(n)。PID控制器以误差ev(n)为输入量,进行PID控制,模拟量输出模块的D-A转换器将PID控制器的数字输出值mv(n)转换为直流电压或直流电流mv(t),用它来控制电动调节阀的开度。
PID是比例(proportional)、积分(integral)、
微分(derivative)的缩写,PID控制器是应用最广的闭环控制器[3],它将偏差的比例、积分和微分通过线性组合构成控制量,用该控制量对被控对象进行控制。计算模拟量PID控制器的输出如公式(1)所示。
(1)
式中:控制器的输入量(误差信号)ev(n)=sp(n)-pv(n)。
整个控制过程如图2所示。
1.1 比例环节
成比例地反映控制系统的偏差信号ev(n),偏差一旦产生,控制器立即产生控制作用,以缩小偏差。P参数(KP)越小比例作用越强,动态响应越快,消除误差的能力越强。在以上定量计算的基础上,根据系统响应情况通过现场调试决定参数P的值,通常将P参数由大向小调,以能达到最快响应又无超调(或无大的超调)为最佳参数。
1.2 积分环节
控制器的输出与输入误差信号的积分成正比关系,主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之越强。通常I参数(Ki=KP/TI)也是由大往小调,即积分作用由小往大调,观察系统响应以能快速消除误差,达到给定值,又不引起振荡为准。
1.3 微分环节
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。D越大,微分作用越强,D越小,微分作用越弱。系统调试时通常把D参数(Kd=KP·TD)从小往大调,由试验决定具体参数。
2 某蒸发线冷凝器PID控制现状及分析
2.1 工艺分析
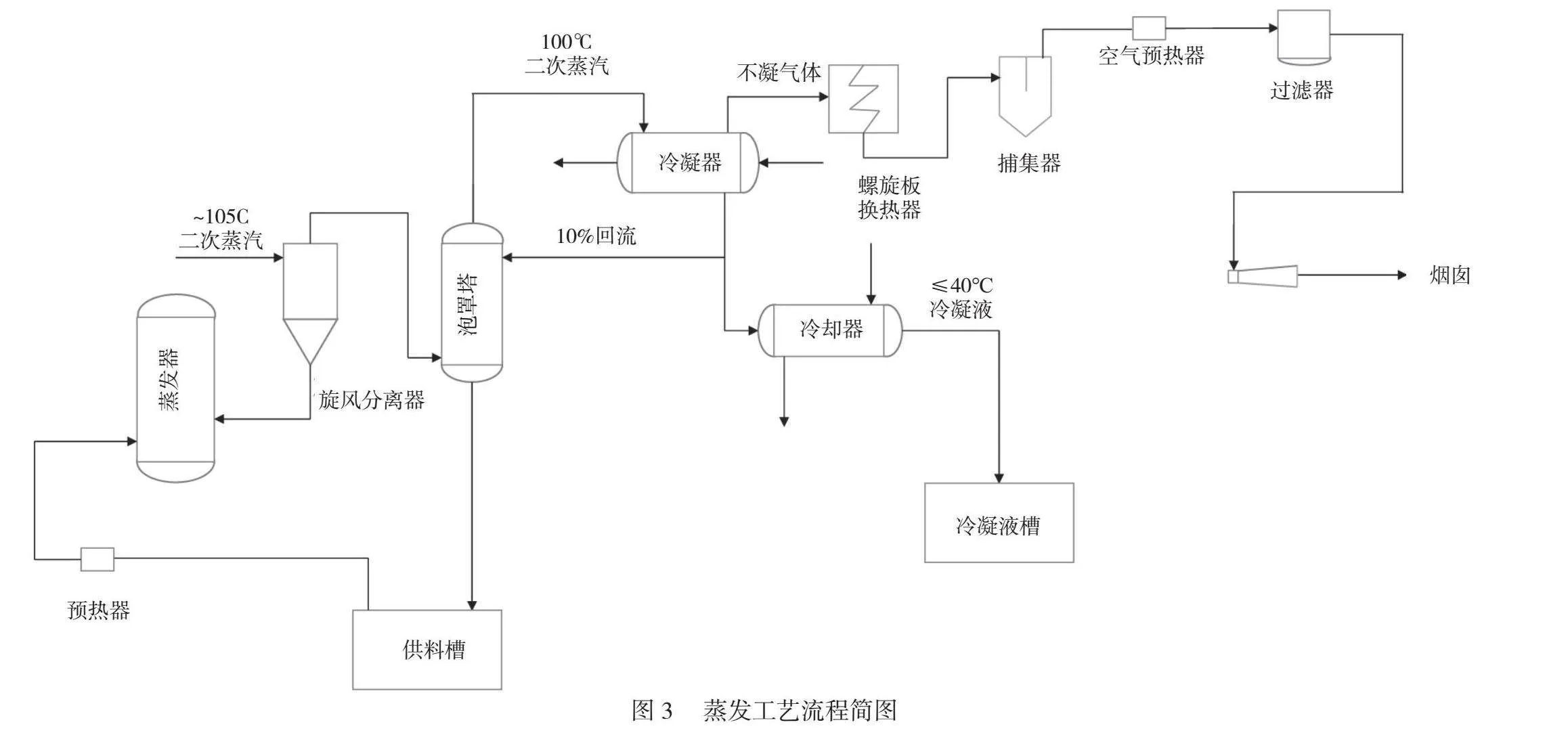
针对蒸发线运行中出现的冷凝液产量偏少和尾气系统中的空气预热器漏水等现象,本文进行了工艺分析。工艺流程图如图3所示。
在蒸发系统实际运行过程中,供料系统上料约为2.5m³/h
(上料控制在2.4m³/h, 低放废液密度约为1.06 kg/cm³),在蒸发器液位稳定的情况下,蒸发器实际处理量应约为2.5m³/h,
在冷凝器中产生的冷凝液也应约为2.5m³/h,因此冷凝液槽接收量约为2.25m³/h(根据设计,10%冷凝液回流至泡罩塔,90%到冷却器,进一步冷却后排至冷凝液槽),而根据2019年生产运行结果显示,冷凝液槽接收量约为1.86m³/h。
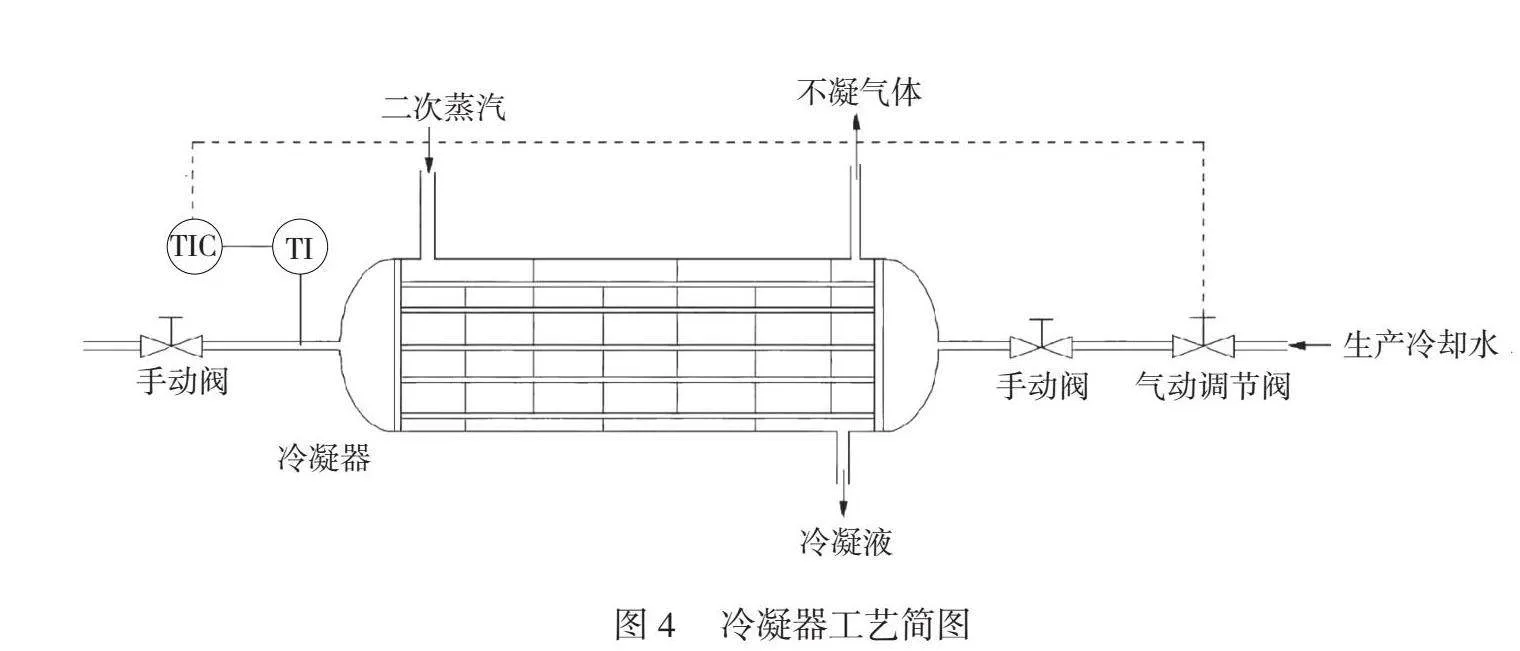
对蒸发线冷凝器运行进行调研发现,该冷凝器采用卧式的固定管板式换热器,蒸汽走壳程,冷却水走管程,在冷却水进口管路设置有气动自动控制阀,并和冷却水出口温度监测形成联锁反馈调节控制。在冷凝器冷却水进口调节阀为自动控制状态运行过程中,受冷却水出口温度反馈调节控制冷却水进口调节阀处于全开、全闭状态。冷凝工艺如图4所示。
2.2 冷凝器控制现状
某蒸发线冷凝器对生产冷却水出口温度进行监测,按设计与工艺要求[4],冷凝器冷却水出口温度不高于60℃。在实际生产运行中,设定值为60℃,将冷凝器冷却水出口温度作为反馈值,与设定值进行对比求出偏差。当偏差为正值时,表明温度未超过60℃,冷凝器冷却水进口调节阀处于关闭状态。当偏差为负值时,表明温度超过60℃,冷凝器冷却水进口调节阀处于开启状态。
在生产运行中,控制参数设定为P=2,I=20,D=10,在此PID参数控制下,冷却水进口调节阀的即时响应效率极高,开阀或关阀均在1s~2s完成,当运行时,温度高于60℃,阀门全开,大量冷却水涌入,冷却水出口温度会继续升至约64℃后开始下降,在1min内,冷却水出口温度低于60℃时,调节阀全关,此时冷却水出口温度将会持续降至约52℃后,再次开始升温,约5min时,温度高于60℃,循环上述过程。此状态的反馈调节导致冷却水供给前端压力不稳定,冷却水大量涌入冷凝器,也会引起强烈的水击作用,对设备的使用寿命影响较大。运行现状见表1。
2.3 冷凝器PID控制分析
由冷凝器控制现状可知,结合前述P、I、D控制参数特性,P参数设置控制值为2,其值非常小,越小比例作用越强,动态响应越快,消除误差的能力越强,在冷凝器控制中表现为响应迅速、调节即时,约1s~2s阀门全开。I参数设置控制值为20,其积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强,由于反馈时间极短,调节作用极强,因此在在冷凝器控制中表现为调节即时。D参数设置控制值为10,其值偏小,微分作用越弱,易出现后置调节反应,具有严重超调现象,使温度曲线剧烈震荡,始终处于非稳态。需要减少比例控制或是增加积分和微分控制,以解决超调现象,使系统趋于动态稳定,使冷却水进口调节阀在某开度范围内上下波动,不迅速开关阀门。
2.4 冷凝器PID控制预期目标
根据生产需求以及对冷凝器稳定保护的要求,设定控制预期目标见表2。
3 冷凝器PID控制初步探究
3.1 比例调节
当去掉PID的积分项和微分项(I=0、D=0),仅变动比例项P时,增加P,调节阀启闭更迅速,超调现象明显。减少P值,调节阀开启速度会减慢,但超调现象仍然明显。该现象表明,仅变动比例控制项无法解决超调现象。
3.2 比例和积分调节
为缓解超调现象,保证阀门启闭过程减缓,因此,将P参数设定为1,D=0,I=100,发现调节阀门启闭与开始变化差异不大,超调现象仍然明显。将I增至1000和2000后,阀门启闭动作变慢,但仍会出现超调现象。I继续增至10000后,此时阀门开启速度明显变慢,超调现象明显减弱。
3.3 比例、积分、微分调节
消除超调现象必须配合微分调节,另外,在阀门启闭的过程中,没有微分项是无法在温度上升或下降过程中动态调节的,因此,引入D参数控制,将D设定为10,超前控制现象不明显。将D增至100,超前动态控制效果仍不明显。将D增至1000后,出现了一定的超前控制,但是随着温度变化的控制效果对结果的影响较小。继续将D增至2000后,出现了明显超前动态控制,使冷却水进口调节阀处于动态微调状态,具体结果见表3。
4 效果与问题
4.1 试验效果
冷却水出口温度为59℃~61℃,冷却水进口调节阀的流量为70m³/h~90 m³/h,基本实现了冷却水进口调节阀在某开度范围内波动,避免迅速开关阀门。连续运行5天后,针对冷凝液产量进行了核算,产能稳定在2.0m³/h~2.1m³/h,基本满足生产设计能力。
4.2 存在问题
在冷凝器单一设备上进行本次研究工作,在较长的时间内(14min~21 min)均为稳定状态,但会周期性出现一次剧烈的温度波动,最大波动为51℃~65℃,波动时间为3min~4 min。根据前端蒸发器监测情况发现,每次冷凝器周期性调节失控,基本是蒸发器运行导致异常液位波动。当蒸发器处于稳定状态时,冷凝器的PID控制效果较好,一旦蒸发器运行不稳定,就会对冷凝器PID控制影响较大。
5 结论
采用PID自控调节,基本可以稳态调节冷凝器的冷却水进口调节阀,对在某一流量区间进行微调,可以达到手动控制的效果,同时无须对出口管线进行改造。
通过初步探究,冷凝液产量达到设计能力(2.0m³/h~2.1m³/h),冷凝器生产水出口温度稳定在(60±1)℃,二次蒸汽冷凝效果较好,表明采用冷凝器进口冷却水PID自控调节基本可以解决二次蒸汽冷凝效果不佳、冷凝液产量偏低、冷凝器出口冷却水温度不稳定等问题,是一条可行的途径。
目前针对PID的探究仅停留在初步摸索阶段,对其3种控制参数叠加的作用还需要进一步详细研究。
限于生产运行要求,考虑受前端蒸发器的影响较大,因此仅在该设备上进行PID自控调节,完成冷凝器稳态控制后,应采用同样的方法对预热器、蒸发器进行PID自控调节。
参考文献
[1]陈敏恒,丛德滋,方图南,等.蒸发操作的特点.化工原理上册[M].2版.北京:化学工业出版社,2002.
[2]廖常初. S7-300/400 PLC应用教程.[M].3版.北京:机械工业出版社,2019.
[3]杨平. PID控制器参数整定方法及应用[M]. 北京:中国电力出版社,2016.
[4]刘殿宇. 蒸发器工艺设计计算及应用[M]. 北京:化学工业出版社, 2020.
猜你喜欢
绿色建筑(2021年4期)2022-01-20 03:21:56
中国特种设备安全(2021年12期)2021-04-26 14:37:32
现代工业经济和信息化(2016年12期)2016-05-17 05:37:46
制冷学报(2014年3期)2014-03-01 03:07:26
制冷学报(2014年1期)2014-03-01 03:06:33
发电技术(2013年1期)2013-04-18 03:20:25
