
高速公路机电设备智能监测系统设计
2024-12-04 00:00:00樊吉飞
中国新技术新产品 2024年10期
摘 要:本文针对高速公路机电设备的智能监测需求,设计了一套智能监测系统。该系统基于FPGA主控芯片,结合STM32模块对设备状态信息进行多种传感器数据采集,实时监测机电设备的运行状态,提前预警可能出现的故障,并提供有效维护和保养建议。利用该系统可以提高机电设备的可靠性和运行效率,减少维护成本和降低交通事故的发生率。
关键词:高速公路;机电设备;智能监测
中图分类号:U 41" 文献标志码:A
随着高速公路的不断发展和扩建,机电设备在保障交通安全和保证顺畅运行方面发挥重要作用[1]。然而,机电设备的故障和损坏可能会导致交通事故和道路拥堵,给交通运输带来严重影响[2]。因此,设计一套智能监测系统来及时发现机电设备的异常情况,并提供有效维护和保养建议,对保障高速公路的安全性和提高运行效率具有重要意义。
1 高速公路机电设备智能监测系统硬件设计
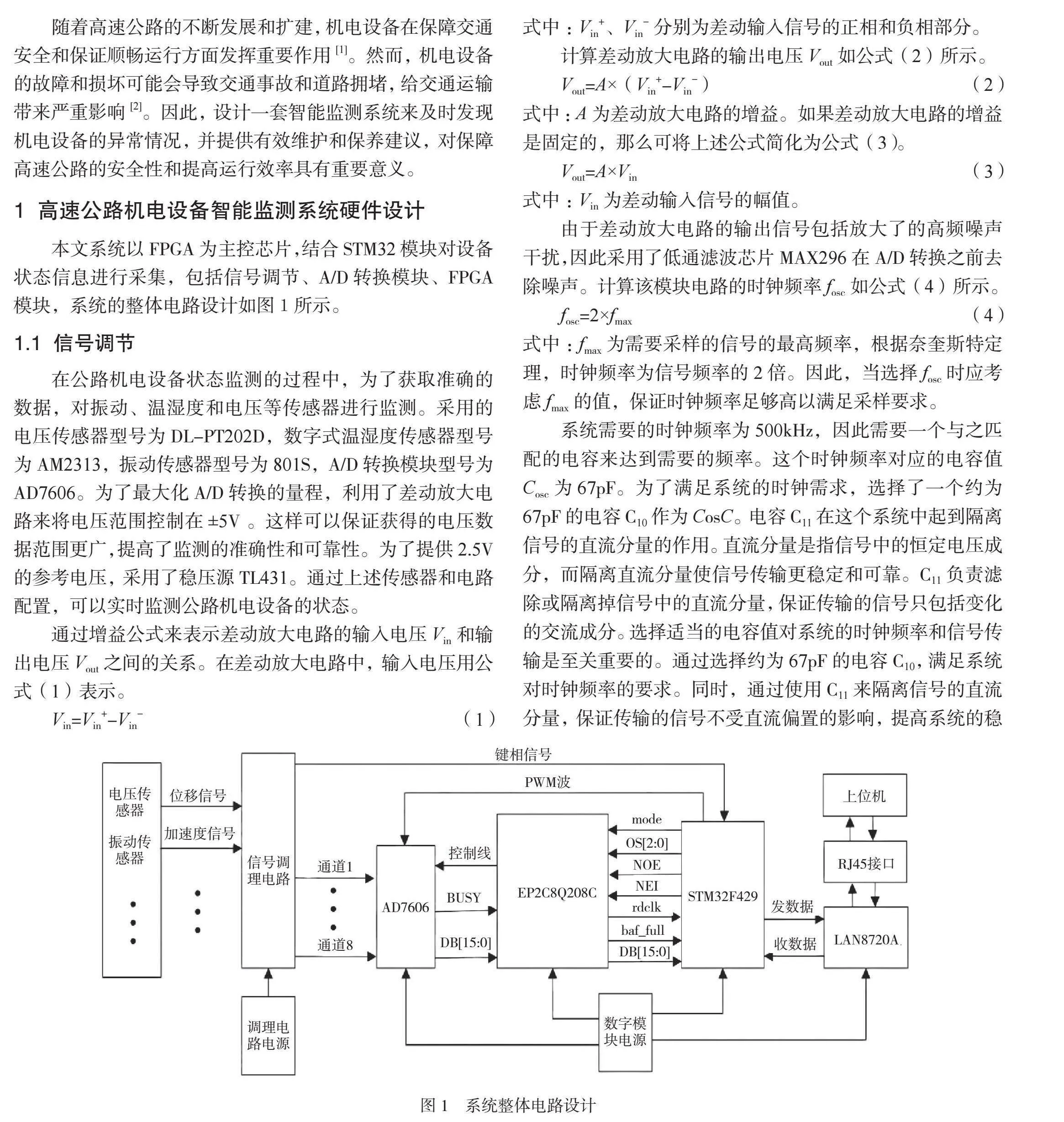
本文系统以FPGA为主控芯片,结合STM32模块对设备状态信息进行采集,包括信号调节、A/D转换模块、FPGA模块,系统的整体电路设计如图1所示。
1.1 信号调节
在公路机电设备状态监测的过程中,为了获取准确的数据,对振动、温湿度和电压等传感器进行监测。采用的电压传感器型号为DL-PT202D,数字式温湿度传感器型号为AM2313,振动传感器型号为801S,A/D转换模块型号为AD7606。为了最大化A/D转换的量程,利用了差动放大电路来将电压范围控制在±5V 。这样可以保证获得的电压数据范围更广,提高了监测的准确性和可靠性。为了提供2.5V的参考电压,采用了稳压源TL431。通过上述传感器和电路配置,可以实时监测公路机电设备的状态。
通过增益公式来表示差动放大电路的输入电压Vin和输出电压Vout之间的关系。在差动放大电路中,输入电压用公式(1)表示。
Vin=Vin+-Vin-" " (1)
式中:Vin+、Vin-分别为差动输入信号的正相和负相部分。
计算差动放大电路的输出电压Vout如公式(2)所示。
Vout=A×(Vin+-Vin-)" " (2)
式中:A为差动放大电路的增益。如果差动放大电路的增益是固定的,那么可将上述公式简化为公式(3)。
Vout=A×Vin" (3)
式中:Vin为差动输入信号的幅值。
由于差动放大电路的输出信号包括放大了的高频噪声干扰,因此采用了低通滤波芯片MAX296在A/D转换之前去除噪声。计算该模块电路的时钟频率fosc如公式(4)所示。
fosc=2×fmax " (4)
式中:fmax为需要采样的信号的最高频率,根据奈奎斯特定理,时钟频率为信号频率的2倍。因此,当选择fosc时应考虑fmax的值,保证时钟频率足够高以满足采样要求。
系统需要的时钟频率为500kHz,因此需要一个与之匹配的电容来达到需要的频率。这个时钟频率对应的电容值Cosc为67pF。为了满足系统的时钟需求,选择了一个约为67pF的电容C10作为CosC。电容C11在这个系统中起到隔离信号的直流分量的作用。直流分量是指信号中的恒定电压成分,而隔离直流分量使信号传输更稳定和可靠。C11负责滤除或隔离掉信号中的直流分量,保证传输的信号只包括变化的交流成分。选择适当的电容值对系统的时钟频率和信号传输是至关重要的。通过选择约为67pF的电容C10,满足系统对时钟频率的要求。同时,通过使用C11来隔离信号的直流分量,保证传输的信号不受直流偏置的影响,提高系统的稳定性和可靠性。
1.2 A/D转换模块
AD7606是一款高性能的A/D转换器,具有较高的分辨率和采样精度。16位的分辨率可以将模拟信号转换为65536个离散的数字值,提供了更高的数据精度[3]。在本文的系统中,将ADIN1~ADIN8作为信号输入端,通过这些输入端口同时转换8个不同的模拟信号。另外,该芯片的信号输入为±5V,可以适应较大范围的信号输入。无论是正负5V的信号还是较小的信号,都能准确地转换为相应的数字值。为了提供一个稳定的基准电平,芯片内部的基准电压为2.5V,以保证A/D转换的准确性和一致性。
1.3 FPGA模块
FPGA的外围电路起到了重要的作用,其提供了FPGA正常工作需要的电源、时钟和复位信号。电源模块为FPGA提供稳定的电压,保证其正常运行。时钟模块为FPGA提供准确的时钟信号,同步其操作[4]。复位模块用来将FPGA恢复到初始状态,以保证系统的可靠性和稳定性。通过选择Cyclone系列的EP2C8Q208CFPGA处理器,不仅可以满足成本和功耗的要求,还能够充分利用其强大的计算和逻辑处理能力。并行传输方式使STM32与FPGA之间的数据读取更高效,而FIFO应用缓冲数据,可以提高系统的稳定性和数据传输的可靠性。
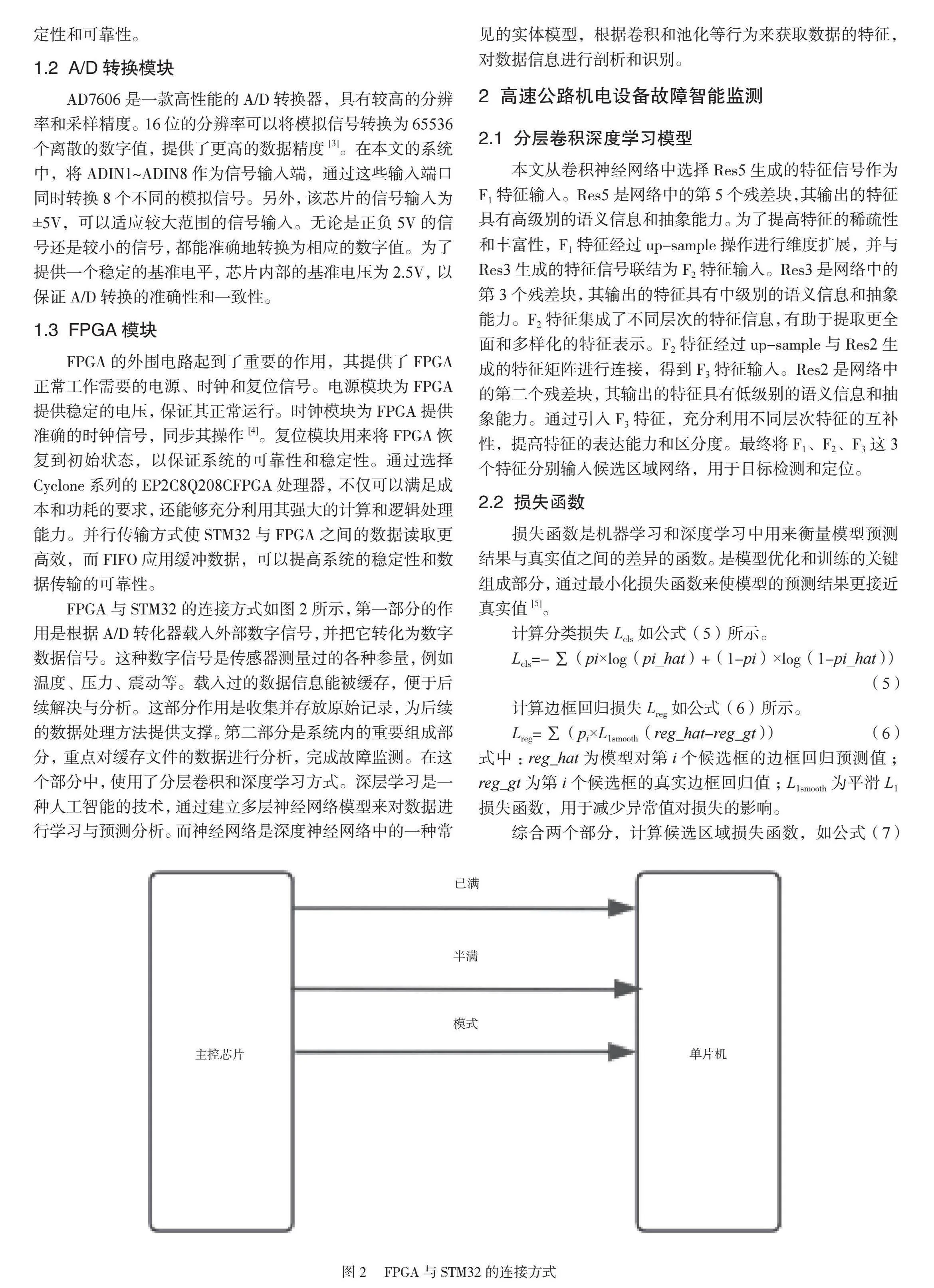
FPGA与STM32的连接方式如图2所示,第一部分的作用是根据A/D转化器载入外部数字信号,并把它转化为数字数据信号。这种数字信号是传感器测量过的各种参量,例如温度、压力、震动等。载入过的数据信息能被缓存,便于后续解决与分析。这部分作用是收集并存放原始记录,为后续的数据处理方法提供支撑。第二部分是系统内的重要组成部分,重点对缓存文件的数据进行分析,完成故障监测。在这个部分中,使用了分层卷积和深度学习方式。深层学习是一种人工智能的技术,通过建立多层神经网络模型来对数据进行学习与预测分析。而神经网络是深度神经网络中的一种常见的实体模型,根据卷积和池化等行为来获取数据的特征,对数据信息进行剖析和识别。
2 高速公路机电设备故障智能监测
2.1 分层卷积深度学习模型
本文从卷积神经网络中选择Res5生成的特征信号作为F1特征输入。Res5是网络中的第5个残差块,其输出的特征具有高级别的语义信息和抽象能力。为了提高特征的稀疏性和丰富性,F1特征经过up-sample操作进行维度扩展,并与Res3生成的特征信号联结为F2特征输入。Res3是网络中的第3个残差块,其输出的特征具有中级别的语义信息和抽象能力。F2特征集成了不同层次的特征信息,有助于提取更全面和多样化的特征表示。F2特征经过up-sample与Res2生成的特征矩阵进行连接,得到F3特征输入。Res2是网络中的第二个残差块,其输出的特征具有低级别的语义信息和抽象能力。通过引入F3特征,充分利用不同层次特征的互补性,提高特征的表达能力和区分度。最终将F1、F2、F3这3个特征分别输入候选区域网络,用于目标检测和定位。
2.2 损失函数
损失函数是机器学习和深度学习中用来衡量模型预测结果与真实值之间的差异的函数。是模型优化和训练的关键组成部分,通过最小化损失函数来使模型的预测结果更接近真实值[5]。
计算分类损失Lcls如公式(5)所示。
Lcls=-∑(pi×log(pi_hat)+(1-pi)×log(1-pi_hat)) " (5)
计算边框回归损失Lreg如公式(6)所示。
Lreg=∑(pi×L1smooth(reg_hat-reg_gt))" (6)
式中:reg_hat为模型对第i个候选框的边框回归预测值;reg_gt为第i个候选框的真实边框回归值;L1smooth为平滑L1损失函数,用于减少异常值对损失的影响。
综合两个部分,计算候选区域损失函数,如公式(7)所示。
Loss=λcls×Lcls+λreg×Lreg" (7)
式中:λcls和λreg是用于平衡分类损失和边框回归损失的权重参数。通过最小化候选区域损失函数,优化模型的分类和边框回归能力,从而提高机电设备故障检测的准确性和鲁棒性。
ti表示预测参数化候选框的坐标,通常使用smoothL1损失函数来计算,如公式(8)所示。
L(M')=∑(pi×R(ti-ti×)) " (8)
式中:回归损失函数L(M')是用来衡量模型对机电设备边界回归的准确性;pi为第i个候选框为机电设备故障的概率;R为smoothL1函数;ti为模型对第i个候选框的坐标预测值;ti×为第i个候选框的真实边界的坐标。在回归损失函数中,采用了smoothL1函数R来计算预测坐标与真实边界的差异。这是为了减少异常值对损失的影响。具体计算方法如公式(9)所示。
R(x)=0.5×x2,if|x|lt;1
|x|-0.5,otherwise" (9)
通过最小化分类损失函数和回归损失函数,使模型更准确地预测候选框的分类和边界信息,提高机电设备故障检测的性能。
判断机电设备故障的监测网络模型的总体损失函数如公式(10)所示。
L(M,M')=L(M)+L(M') " (10)
式中:M为模型对机电设备故障的分类损失函数;M'为模型对机电设备边界的回归损失函数。
将分类损失函数和回归损失函数相加,得到了总体损失函数L(M,M')。通过最小化总体损失函数,优化模型的分类和边界回归能力,提高机电设备故障检测的准确性和鲁棒性。
3 试验结果
3.1 通信测试
经过使用Altera公司的QuartusII软件进行逻辑分析,对FPGA是否成功读取A/D模块数据进行了验证。在验证过程中,前两个通道的参考电压分别设置为2.5V和1.2V,第三个通道接地,其余通道悬空未连接任何电源。对各通道的电压值进行了计算,并发现其电压值几乎等于其对应的参考电压。
在A/D交换的过程中,数字信号被转化为数据信号,再由FPGA进行载入与处理。验证成功每个通道电流值,确定FPGA正常载入了A/D模块数据信息,而且成功将数字信号转化为数字数据信号,这个结论对保证系统的正常运行至关重要。根据FPGA的数据读取和处理功能,掌握传感器测量过的各种数值,并用于后续数据处理和故障监测。
3.2 故障监测实例
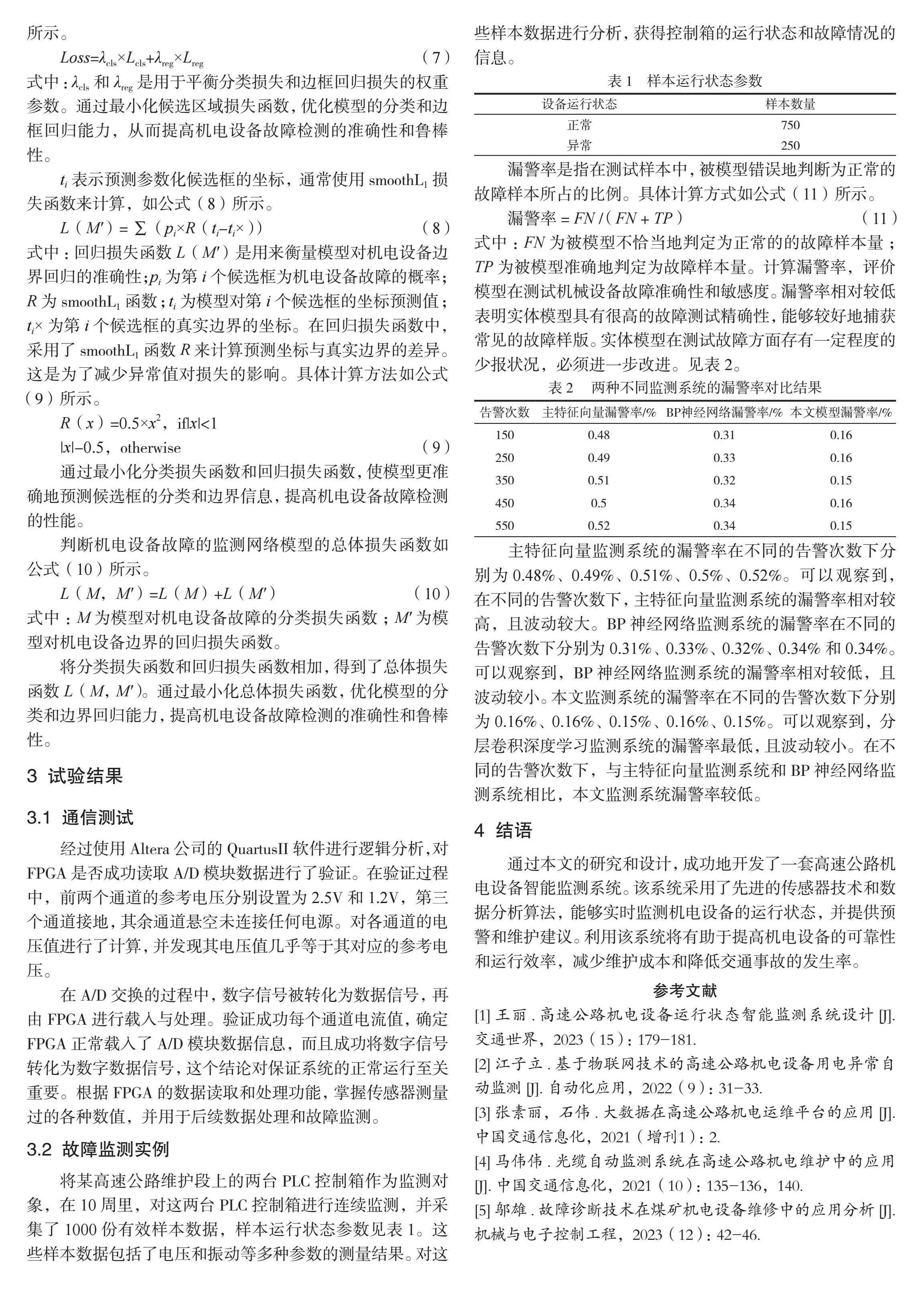
将某高速公路维护段上的两台PLC控制箱作为监测对象,在10周里,对这两台PLC控制箱进行连续监测,并采集了1000份有效样本数据,样本运行状态参数见表1。这些样本数据包括了电压和振动等多种参数的测量结果。对这些样本数据进行分析,获得控制箱的运行状态和故障情况的信息。
漏警率是指在测试样本中,被模型错误地判断为正常的故障样本所占的比例。具体计算方式如公式(11)所示。
漏警率= FN / (FN + TP) (11)
式中:FN为被模型不恰当地判定为正常的的故障样本量;TP为被模型准确地判定为故障样本量。计算漏警率,评价模型在测试机械设备故障准确性和敏感度。漏警率相对较低表明实体模型具有很高的故障测试精确性,能够较好地捕获常见的故障样版。实体模型在测试故障方面存有一定程度的少报状况,必须进一步改进。见表2。
主特征向量监测系统的漏警率在不同的告警次数下分别为0.48%、0.49%、0.51%、0.5%、0.52%。可以观察到,在不同的告警次数下,主特征向量监测系统的漏警率相对较高,且波动较大。BP神经网络监测系统的漏警率在不同的告警次数下分别为0.31%、0.33%、0.32%、0.34%和0.34%。可以观察到,BP神经网络监测系统的漏警率相对较低,且波动较小。本文监测系统的漏警率在不同的告警次数下分别为0.16%、0.16%、0.15%、0.16%、0.15%。可以观察到,分层卷积深度学习监测系统的漏警率最低,且波动较小。在不同的告警次数下,与主特征向量监测系统和BP神经网络监测系统相比,本文监测系统漏警率较低。
4 结语
通过本文的研究和设计,成功地开发了一套高速公路机电设备智能监测系统。该系统采用了先进的传感器技术和数据分析算法,能够实时监测机电设备的运行状态,并提供预警和维护建议。利用该系统将有助于提高机电设备的可靠性和运行效率,减少维护成本和降低交通事故的发生率。
参考文献
[1]王丽.高速公路机电设备运行状态智能监测系统设计[J].交通世界,2023(15):179-181.
[2]江子立.基于物联网技术的高速公路机电设备用电异常自动监测[J].自动化应用,2022(9):31-33.
[3]张素丽,石伟.大数据在高速公路机电运维平台的应用[J].中国交通信息化,2021(增刊1):2.
[4]马伟伟.光缆自动监测系统在高速公路机电维护中的应用[J].中国交通信息化,2021(10):135-136,140.
[5]邬雄.故障诊断技术在煤矿机电设备维修中的应用分析[J].机械与电子控制工程,2023(12):42-46.
猜你喜欢
建材发展导向(2021年20期)2021-11-20 05:43:18
建材发展导向(2021年13期)2021-07-28 07:15:02
建材发展导向(2021年7期)2021-07-16 07:08:50
汽车维修与保养(2019年4期)2019-09-11 05:48:48
建材发展导向(2019年5期)2019-09-09 09:21:46
经济技术协作信息(2018年8期)2019-01-14 03:06:36
小学阅读指南·低年级版(2017年11期)2017-12-06 15:14:59
中国交通信息化(2016年9期)2016-06-06 07:42:10
中国交通信息化(2015年8期)2015-06-06 06:32:57
小说月刊(2014年4期)2014-04-23 08:52:20
