
复杂背景无人机巡检图像输电线异物缺陷检测
2024-12-04 00:00:00蒋光遒豆鹏涛杨尔成马宁宁叶芳
中国新技术新产品 2024年10期


摘 要:无人机巡检输电线图像的背景较为复杂,因此在对输电线异物缺陷进行检测的过程中,误检的情况较为严重。本文提出基于支持向量机的复杂背景无人机巡检图像输电线异物缺陷检测方法,采用直方图均衡化的方法增强输电线无人机巡检图像的对比度,利用固定大小的网格将输电线图像划分为多个区域,使用区域内的像素点计算特征,并对其进行加权平均融合操作,提取背景特征。为支持向量机模型选择合适的核函数和参数后,对其进行交叉验证,将提取的背景特征作为输入函数。根据像素与输电线之间的关系,检测异物缺陷,测试结果表明,误检率仅为0.5%。
关键词:支持向量机;复杂背景;无人机巡检图像;输电线异物缺陷检测;直方图均衡化;像素点;加权平均融合;核函数;交叉验证
中图分类号:TN 911" " " " " " " 文献标志码:A
当利用无人机巡检输电线图像进行输电线异物缺陷检测时,检测效果受到多种因素的影响[1],难以识别异物缺陷[2-3]。一些小的异物(例如塑料袋)可能会因为其尺寸太小而难以识别。异物的颜色和纹理与输电线接近也会影响检测效果[4]。一些与输电线颜色和纹理相似的异物可能会被误认为是输电线的一部分[5],一些颜色和纹理与输电线明显不同的异物则更容易被识别。图像的质量和分辨率对异物缺陷检测也有很大影响。高质量、高分辨率的图像可以提供更多的细节信息,使异物缺陷更容易识别[6]。这些因素对检测结果的具体影响分为无法识别真实的异物缺陷,错误地识别了正常的输电线或者其他物体为异物缺陷以及检测速度缓慢,在不同环境中和不同情况下适应性下降等[7]。因此,本文提出基于支持向量机的复杂背景无人机巡检图像输电线异物缺陷检测方法,并进行对比测试的方式,验证了本文设计方法的检测效果。
1 复杂背景无人机巡检图像输电线异物缺陷检测方法
1.1 提取输电线无人机巡检图像背景特征
本文重点研究复杂背景无人机巡检图像输电线异物缺陷检测,在进行检测前,结合图像具体情况对其进行预处理。预处理可以提高图像对比度,例如直方图均衡化,使目标与背景之间的差异更明显,有利于提高后续异物缺陷检测方法的准确性和稳定性。无人机巡检图像经常会受到传感器噪声、风吹等因素影响,会出现一些随机的、不相关的像素点,可能会干扰后续的分析和处理步骤。采用预处理方法,例如滤波操作,可以去除噪声,提高图像的质量和清晰度,也可以提高数据的统一性。在巡检过程中,无人机会采集不同光照条件下的图像,这些图像可能具有不同的亮度、色彩等特征。采用预处理方法,可以调整图像的亮度和色彩,使不同图像之间有一定的统一性和可比性。本文采用直方图均衡化的方法增强输电线无人机巡检图像的对比度[8]。直方图均衡化是一种基于像素灰度值分布的增强方法,本文重新映射像素的灰度值,以提高原始输电线无人机巡检图像的对比度[9]。在处理过程中,本文使用OpenCV库来进行直方图均衡化操作,完成图像预处理。在这个基础上提取输电线无人机巡检图像背景特征,采用固定大小的网格将输电线图像划分为多个区域。使用区域内的像素点计算每个划分区域的特征,计算过程如公式(1)所示。
g=gh+gr+gk-gj-gc (1)
式中:g为划分后复杂背景无人机巡检输电线图像区域的背景特征;gh为划分后复杂背景无人机巡检输电线图像区域的信息熵;gr为划分后复杂背景无人机巡检输电线图像区域的边缘比率参数;gk为划分后复杂背景无人机巡检输电线图像区域的灰度共生矩阵反差参数;gj为划分后复杂背景无人机巡检输电线图像区域的能量参数;gc为划分后复杂背景无人机巡检输电线图像区域的对比度参数。
采用加权平均融合操作来提取每个区域的背景特征,能够更好地表示该区域的整体背景信息,根据每个划算区域内像素点特征来提取背景特征。每个划分区域对应的背景条件不同,例如不同的光线和杂乱程度不一的背景等。加权平均融合操作的目的是将各区域的特征进行加权平均,以获得更全面、准确的区域背景特征。加权平均融合操作可以使权重较高的区域对总体背景特征的贡献更大,权重较低的区域对总体背景特征的贡献更小。这样可以更好地反映整个图像的背景信息,有效地抑制噪声和局部区域的干扰,提取与输电线相对应的背景特征。可以根据区域重要性和相关性,对加权平均融合操作中的权重参数进行调整。给予重要性较高的区域更高权重,因此它们对总体背景特征的影响更大。根据具体情况设定不同区域之间的相关性,适应不同背景场景下的特征融合需求。综上所述,利用加权平均融合操作提取特征,可以更好地表示区域的背景特征,构建准确且适应复杂背景的模型,为后续的前景检测提供更可靠的背景基准。处理过程如公式(2)所示。
G=∑wng (2)
式中:G为整体复杂背景无人机巡检输电线图像的背景特征;n为复杂背景无人机巡检输电线图像的划分数量;wn为每个区域提取的背景特征权重参数。
将提取的背景特征构建为背景模型,本文引入高斯分布模型,描述背景像素点的特征分布情况,如公式(3)所示。
G(a)=h(a)∑wng " " "(3)
式中:G(a)为a图像的背景像素高斯分布模型;h(a)为高斯分布系数。
利用背景模型,比较输入图像中的像素点与背景模型中像素点的分布情况,将与背景模型差异较大的像素点检测作为前景像素点,即输电线部分。
1.2 基于支持向量机的输电线异物缺陷检测
引入支持向量机,构建输电线异物缺陷检测方法。以支持向量机作为输电线异物缺陷检测的分类器,该方法具备强大的泛化能力,在模型训练阶段,其根据最大化间隔来找到最佳的判决边界,利用核函数将数据映射至高维特征空间,使原本线性不可分的样本在新的特征空间中变得线性可分,更好地抓取数据中的非线性特征。该方法适用于小样本和高维数据,其不受样本数量限制,在高维数据分析上表现出色。输电线无人机巡检图像的样本数量相对较少,特征(包括输电线特征和背景特征)维度也较高,支持向量机能够有效应对这种情况。基于上述分析,该步骤结合第1.1节提取的输电线特征和背景特征,将它们作为支持向量机模型的输入数据。在训练最小二乘法支持向量机(Least Squares Support Vector Machine,LSSVM)模型阶段,将第1.1节提取的输电线特征和背景特征作为输入数据。输电线特征包括输电线无人机巡检图像中与输电线有统计学意义的特征,背景特征包括与背景区域有统计学意义的特征。合适的核函数和参数决定了LSSVM模型的性能,因此,本文设置核函数的参数如公式(4)所示。
(4)
式中:f为LSSVM模型结构元的核函数;d为LSSVM模型的结构元;(x,y)为输电线无人机巡检图像的像素信息;x、y分别为图像像素点横、纵坐标;(u,v)为LSSVM模型的参数,该参数决定(x,y)输电线无人机巡检图像的像素信息的变化尺度;u为像素x的变化量;v为像素y的变化量。这种设置方式保证LSSVM模型的结构d能够访问输电线无人机巡检图像中的所有像素信息。
根据公式(4)设置LSSVM模型的参数。核函数的参数d决定了模型的分类误差惩罚权重,参数(u,v)决定了高斯径向基核函数的变化尺度。调整这2个参数可以影响模型的性能。
训练LSSVM模型:使用输入数据和对应的标签数据(例如0为背景,1为输电线)来训练LSSVM模型。LSSVM模型的训练过程是最小化目标函数来优化结构元和参数,找到最佳的判决边界。在这个基础上,利用交叉验证的方式优化模型,使误差率最低,泛化性能最好。交叉验证方式是线性变换系数交叉验证(Linear Transform Coefficient Cross-Validation)。在样本训练过程中采用线性变换系数交叉验证的方法处理每轮训练和测试集,选择模型参数并进行性能评估。交叉验证的目标是调整线性变换系数的取值,选择最佳的模型参数,使模型在交叉验证过程中误差率最低,泛化性能最好,提高输电线异物缺陷检测方法的准确性和稳定性,如公式(5)所示。
f(x,y)=sng[(w*)Tφ(x,y)+b*] (5)
式中:w*为交叉验证的线性变换系数;b*为常数;g为区域内像素点特征;sng为符号函数;φ(x,y)为高斯处理后的图像;f(x,y)为线性变换后的图像。
利用训练好的LSSVM模型预测测试集中的数据,得到每个像素点的分类结果。根据分类结果,分离输电线部分与其他背景部分。当输电线部分与其他背景部分存在直接连接的像素点时,说明此时输电线存在异物故障,确定连接像素的分布形态即可判断具体异物缺陷类型;当输电线部分与其他背景部分不存在直接连接的像素点时,说明此时输电线不存在异物故障。按照上述方式检测复杂背景无人机巡检图像输电线异物的缺陷。
2 测试与分析
2.1 测试环境
当分析本文设计的复杂背景无人机巡检图像输电线异物缺陷检测方法的性能时,以实际巡检图像为基础进行对比测试。本文使用大疆精灵3无人机采集图像数据,作为一款微小型一体航拍无人机,大疆精灵3的优点是外观小巧(质量仅为1 280 g)、便于携带和操作简单,其在正常情况下的可持续飞行时间为 20 min~25 min,最大飞行高度为 500 m,可控制距离为5.0 km,可执行的悬停精度为0.5 m,最大旋转角速度为200°/s,最大上升速度为5.0 m/s,最大下降速度为3.0 m/s。以此为基础,利用其对连续10 d内的某段具体输电线进行图像采集,分别采用文献[4]提出的以生成对抗网络为基础的无人机航拍输电线路图像缺陷检测方法以及文献[5]提出的以改进型Freeman链码为基础的无人机航拍输电线路图像缺陷识别方法进行测试。
2.2 测试结果与分析
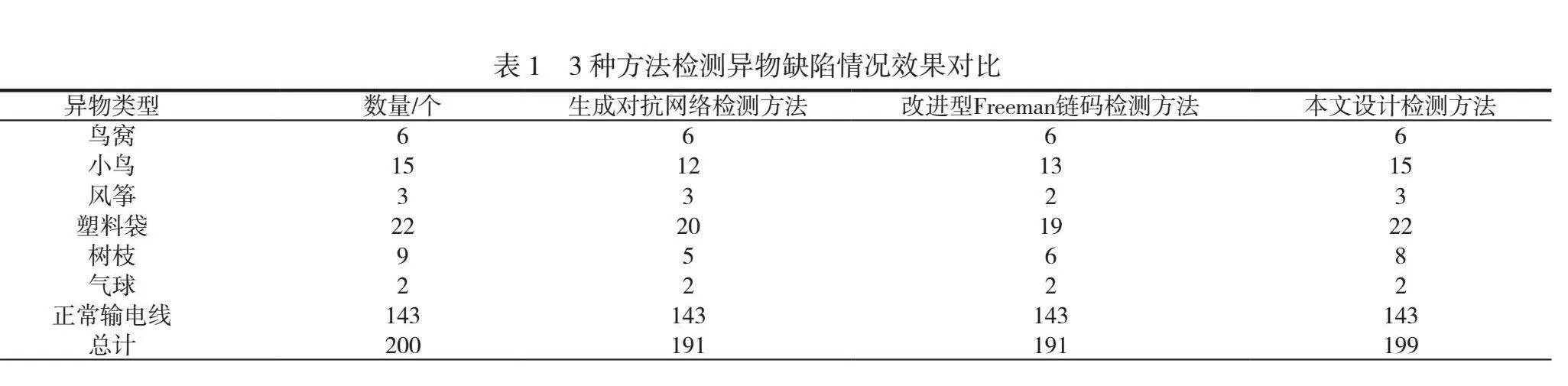
结合上述测试环境,当分析不同方法的测试结果时,本文将存在异物缺陷的图像进行分类,并按类别统计3种方法的检测效果,效果对比见表1。
根据表1的测试结果对3种不同方法的检测性能进行分析,对不同类型的异物缺陷来说,3种方法的检测呈现的效果不同。3种方法均准确检出了异物类型为鸟窝和气球的输电线异物缺陷;对异物类型为风筝的输电线异物缺陷来说,改进型Freeman链码检测方法存在1次误检情况;对异物类型为塑料袋的输电线异物缺陷来说,生成对抗网络检测方法和改进型Freeman链码检测方法的误检次数分别为2次和3次;对异物类型为小鸟的输电线异物缺陷来说,生成对抗网络检测方法和改进型Freeman链码检测方法的误检次数分别为3次和2次;对异物类型为树枝的输电线异物缺陷来说,3种不同方法均出现了误检情况,生成对抗网络检测方法的误检次数为4次,改进型Freeman链码检测方法的误检次数为3次,本文设计检测方法的误检次数为1次。生成对抗网络检测方法和改进型Freeman链码检测方法对不同类型输电线异物缺陷的误检率均为4.5%,本文设计检测方法的误检率仅为0.5%。综合上述测试结果可知,本文设计方法可以对不同类型输电线异物缺陷进行有效检测。
为了进一步分析本文方法的性能,验证其有效性,以输电线异物缺陷检测准确率为衡量指标,该指标值越高,本文设计方法的检测准确性越高,检测效果越好。不同方法的输电线异物缺陷检测准确率见表2。
根据表2数据可知,3种方法的输电线异物缺陷检测准确率均较高,均达到96.0%以上,经过分析可知,在1 000个测试样本中,本文设计检测方法的输电线异物缺陷检测准确率保持在99.9%以上,未出现较多检测错误。与本文方法相比,在1 000个测试样本中,生成对抗网络检测方法的输电线异物缺陷检测准确率降至96.8%;在1 000个测试样本中,改进型Freeman链码检测方法的输电线异物缺陷检测准确率为97.7%,虽然改进型Freeman链码检测方法的检测准确率比生成对抗网络检测方法的检测准确率高,但是比本文设计检测方法检测准确率低2.2%。由此可知,本文设计检测方法的输电线异物缺陷检测准确率最高,说明该方法的检测效果更佳。
3 结语
为了加强输电线异物缺陷的检测效果,须综合考虑无人机巡检图像质量的影响因素,采取相应措施来优化算法和数据处理过程。本文提出基于支持向量机的复杂背景无人机巡检图像输电线异物缺陷检测方法研究,本文方法提高了复杂背景无人机巡检图像输电线异物缺陷情况的检测准确率,检测效果良好,可为实际的输电线巡检和安全管理提供参考。
参考文献
[1]朱长荣,吕文超,单超,等.基于IMU-GNSS-VO的输电线无人机巡检定位和目标跟踪自适应方法[J].电力建设,2023,44(8):61-70.
[2]胡明辉.基于迁移学习的无人机杆塔巡检图像异常识别技术及试验对比[J].粘接,2023,50(6):136-139.
[3]田晨,许志浩,李强,等.基于Deeplabv3+与Otsu模型的输电线电晕放电紫外图像分割方法[J].激光与红外,2023,53(1):153-160.
[4]宋杭选,刘智洋,孙泽锋,等.基于生成对抗网络的无人机航拍输电线路图像关键信息提取[J].黑龙江电力,2022,44(5):462-466,470.
[5]多俊龙,杨巧为,李慧慧.基于输电线路图像边缘斜率突变的改进型Freeman链码断股缺陷识别研究[J].东北电力技术,2022,43(6):53-59.
[6]仲林林,胡霞,刘柯妤.基于改进生成对抗网络的无人机电力杆塔巡检图像异常检测[J].电工技术学报,2022,37(9):2230-2240,2262.
[7]张俊,庞世强,李晓斌,等.融合LSD算法与Hough变换的航拍输电线路图像杆塔自动识别方法[J].电子器件,2021,44(5):1210-1214.
[8]陈荣保,韦盛,盛雨婷,等.改进EDLines算法暨在高空输电线识别与巡检中的应用[J].传感器与微系统,2021,40(9):157-160.
[9]秦钟,杨建国,王海默,等.基于Retinex理论的低照度下输电线路图像增强方法及应用[J].电力系统保护与控制,2021,49(3):150-157.
猜你喜欢
中老年保健(2021年9期)2021-08-24 03:49:56
昆明医科大学学报(2020年12期)2021-01-26 00:43:52
兽医导刊(2019年1期)2019-02-21 01:14:26
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
通信电源技术(2016年3期)2016-03-26 07:13:44
电测与仪表(2015年2期)2015-04-09 11:28:50
电视技术(2014年11期)2014-12-02 02:43:28
电测与仪表(2014年21期)2014-04-04 12:31:54
电测与仪表(2014年2期)2014-04-04 09:04:08
