
多波束系统在水下探测中的应用
2024-12-04 00:00:00郑吉林
中国新技术新产品 2024年4期





摘 要:由于单波束在水下探测的局限性,因此为实现大范围,全覆盖和高精度的探测,本文对多波束系统在水下探测中的应用进行研究。在介绍多波束系统的构成与测量的基础上,结合水下探测项目,通过多波束系统波束脚印归位、数据检测、数据改正和数据结构统一,对精度进行评估。通过分析成果精度得出,应用多波束系统的成果精度更满足实际需求,有一定的先进性和实用性。
关键词:多波束系统;波束脚印归位;数据改正;精度评估
中图分类号:P 229" " " 文献标志码:A
在采用多波束系统对深海探测领域进行研究的过程中发现,多波束探测技术是目前一种新型水下地形探测方法。随着现阶段高新科研领域内高端计算机、数字化定位和高精度传感器等辅助性手段的参与及支持,这项探测技术在市场内的应用开始逐步深化,并在科研工作的持续推进下取得了显著的成绩[1]。
与常规的单波束声纳探测技术相比,多波束系统能实现大范围、全覆盖和高精度测量[2]。
1 多波束系统的构成与测量
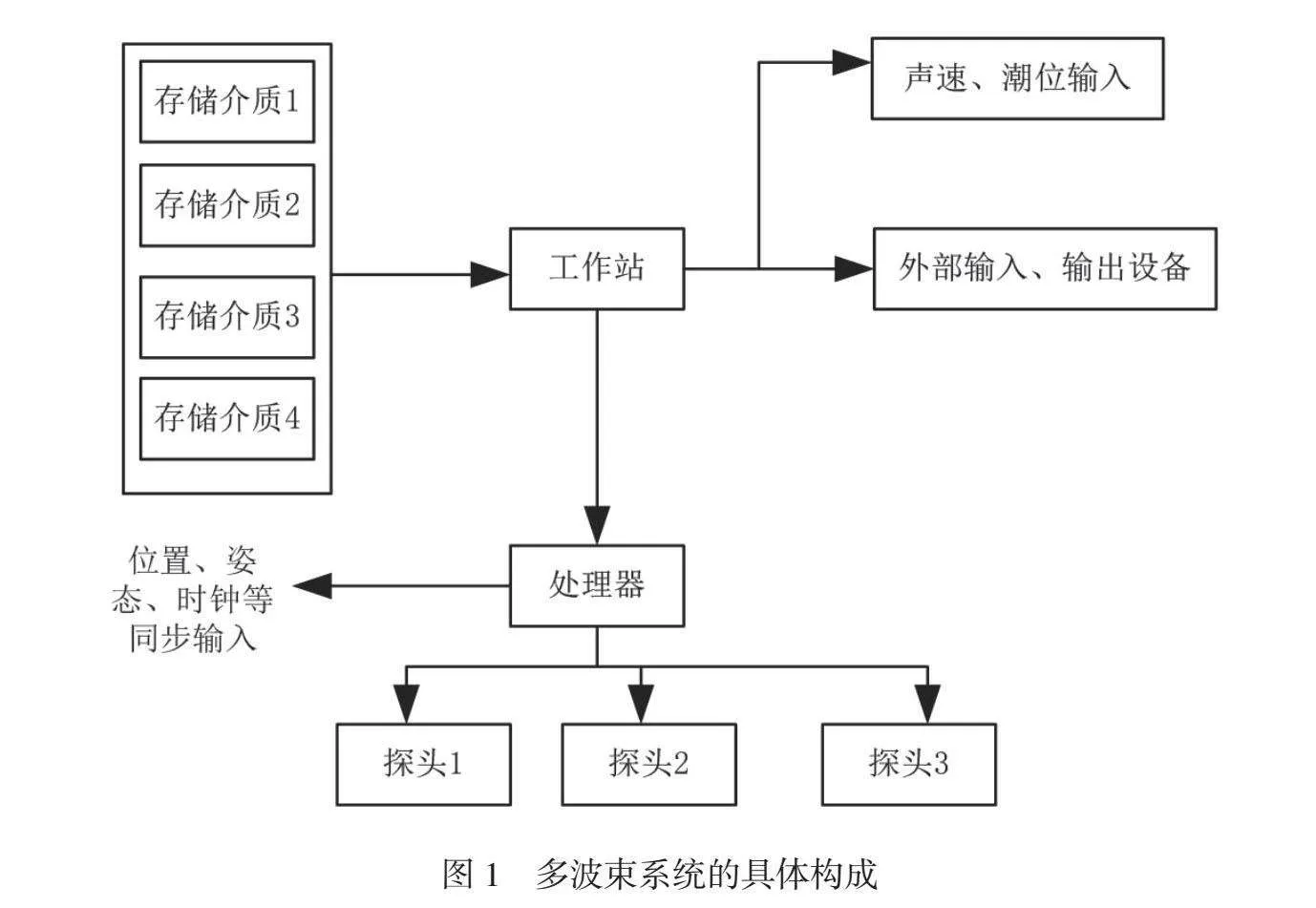
为保证水下探测项目的顺利实施,应在应用前,对多波束系统的构成、测量与设备安装标定进行分析,在此过程中要明确,一个完整可用的多波束系统主要由3个部分构成,分别为操作站、处理单元和探头,除此之外,为发挥系统在水下更高的作用与价值,还需要集成并安装系统动力传感器、定位装置、声速传感器、后处理程序和终端等[3]。具体构成如图1所示。
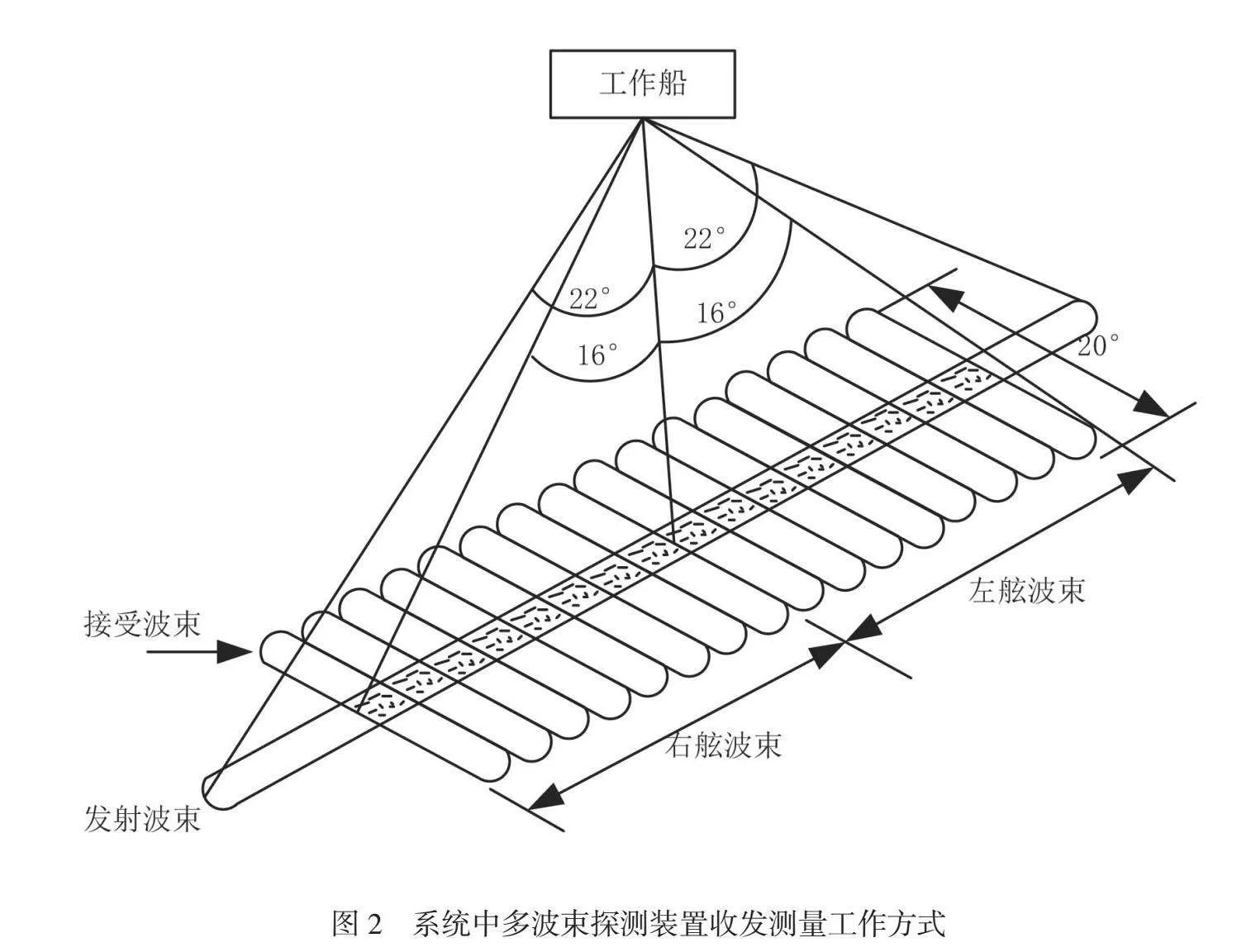
在此过程中应明确,该系统与单波束测深装置的工作原理相同,均采用超声探测原理[4]。探测装置是通过电声传感器向水下发出一道声波,再从水下接收一道回波,通过测量从水下发出声波到接收声波时间的方式计算水下深度[5]。多波束系统的信号收发部分由两套方向性正交的探头构成,探头相互独立地进行收发,用这种方式,得到一条具有竖直方向的窄波束。如图2所示。
2 水下探测项目实例
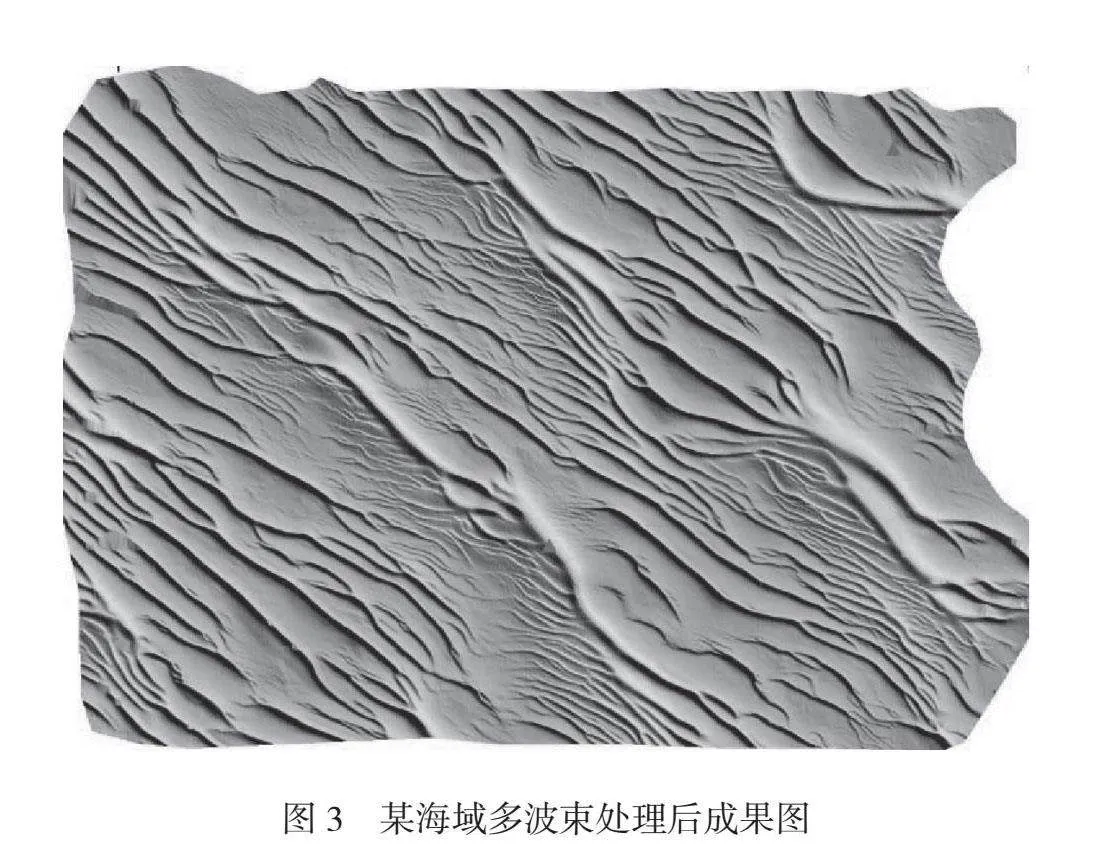
以海域工程项目为例,根据工程需要,对该区域的海域进行水下多波束探测扫测。经过现场勘测,扫测区域的面积约为200km²。由于该区域的地形较为复杂,海域的沙波较多且呈锯齿状,因此总体分析该海域受区域内沙波地貌分布的影响,区域地形起伏较为频繁且剧烈,相邻沙波波峰间形成沟壑状地形,如图3所示。通过处理分析得到的数据成果能更直观地掌握海域地形沙波分布、大小和具体位置,便于为该海域工程建设和设计提供更精确的数据,研究决定使用多波束系统,对此区域进行水下探测[6]。
此次研究的海域潮汐引用理论深度基准面,该海域属于不规则全日潮,其余海域均为不规则半日潮。潮时方面,由于潮波从太平洋传来,因此造成台湾地区东岸的潮时最早,并由此向南、北两端推迟。海峡内平均潮差等值线在24°N以南基本沿纬向分布,梯度较大,大于3.0m。最大可能潮差分布与平均潮差类似,澎湖列岛以南在2.0~6.0m,以北在内潮汐涨落表现为往复流特征。
3 多波束系统波束脚印归位
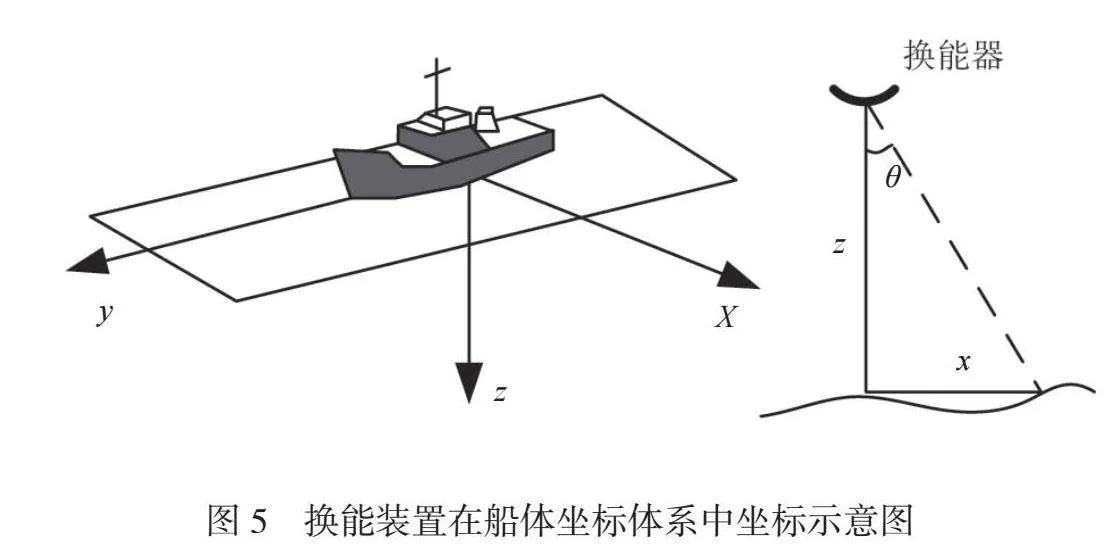
将多波束系统应用到水下探测中,当对波束脚印进行归位计算时,涉及潮位、船位、船姿、坐标系和投影面间的转换等参数。波束脚印船体坐标的计算过程可以看作声线改正的过程,该方法主要考虑了3个参量,即在垂直基准面上的入射角、声速剖面和行进时间[7]。由于海洋是一种非均质的介质,因此声波在海洋中的传播并非沿着一条直线。在不同的介质层界面中,声线会发生折射,因此可以用图4表示声波在不同介质层中的传播形式。
声线追踪是为获得波束轨迹的真实位置,需要根据其传播路径对轨迹进行追踪。声线曲线修正是由声线追踪获得的波束船舶坐标的运算过程。在声线曲线修正过程中,声速剖面非常重要,基本假设如下:声速剖面不存在代表误差,能够准确地反映被测海域中的声波传播特征。声波速度在垂直方向上是变化的,没有横向的变化。在海洋中声波的传播特征符合Snell定律,如公式(1)所示。
(1)
式中:θ为声波入射角;C0、C1、Cn为声速;p为常数。假设换能装置在船体坐标体系中的坐标为(x0,0,z0),如图5所示。
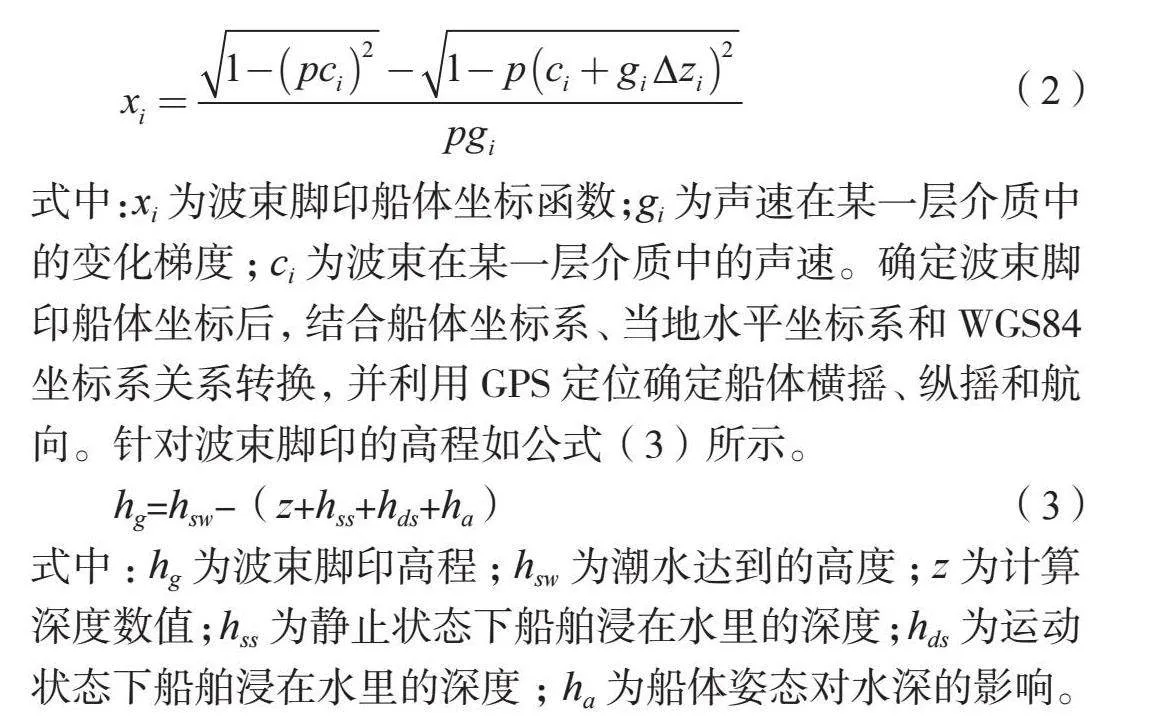
波束脚印船体坐标为(x,y,z),函数如公式(2)所示。
(2)
式中:xi为波束脚印船体坐标函数;gi为声速在某一层介质中的变化梯度;ci为波束在某一层介质中的声速。确定波束脚印船体坐标后,结合船体坐标系、当地水平坐标系和WGS84坐标系关系转换,并利用GPS定位确定船体横摇、纵摇和航向。针对波束脚印的高程如公式(3)所示。
hg=hsw-(z+hss+hds+ha)" " "(3)
式中:hg为波束脚印高程;hsw为潮水达到的高度;z为计算深度数值;hss为静止状态下船舶浸在水里的深度;hds为运动状态下船舶浸在水里的深度;ha为船体姿态对水深的影响。
4 多波束系统测深数据检测
对测量数据进行粗差检查。1)对GPS平面数据进行检查,以消除因GPS接收机接收的信号不准确造成的虚假数据。基于GPS数字的定位品质指数、有效卫星数目和水平精度扩散系数,综合考虑外界环境、多径、整周跳变和天线移动等因素,以此判断GPS数字的定位品质。2)深度数据筛选测试。主要针对数据的主客观方面,发现并标定异常深度,以此提高数据质量。按自动化水平可将现有的检测和处理方法划分为交互式检测和自动检测。本文介绍了一种基于最小二乘趋势面方法的测量方法,并对测量结果进行分析。结合平面位置和深度,通过多项式曲线函数z=f(x,y),对其进行拟合,如公式(4)所示。
(4)
式中:z为深度;(x,y)为平面位置。系统误差通常是主要仪器和附属仪器自身的误差。在实际应用中,通常采用高精度定位装置和单波束测深比较等其他测试手段对系统误差进行统计。如果发现系统误差很大,就应查明其原因,并再次进行测量。在测试前,应将系统误差检查与仪器标定、校准相结合,以减少因测量导致的损失。将测量结果中出现的误差输入多波束资料处理软件中,由该软件进行二次加工。
5 水下探测数据改正与数据结构统一
由于多种多波束系统在广角定向发射、多阵列信号接收、波束形成与处理等方面的方法与技术,因此使表达的数据在空间坐标上存在一定的差别。为更好地表示航迹与航迹间的空间关系,须对船舶基准坐标系进行统一。为便于对传感器或船舶进行姿态补偿,将船舶参考坐标系的原点设在传感器的对称中心,使船舶的纵倾、横摇和偏摆等均与船舶参考坐标系相吻合,并为右端系统。每类数据单元的单位表示都要考虑两个要求:保证符合相关规定的数据位元的精确性和保证表示的数据的一致性。数据单元的单位标准见表1。
6 成果精度分析
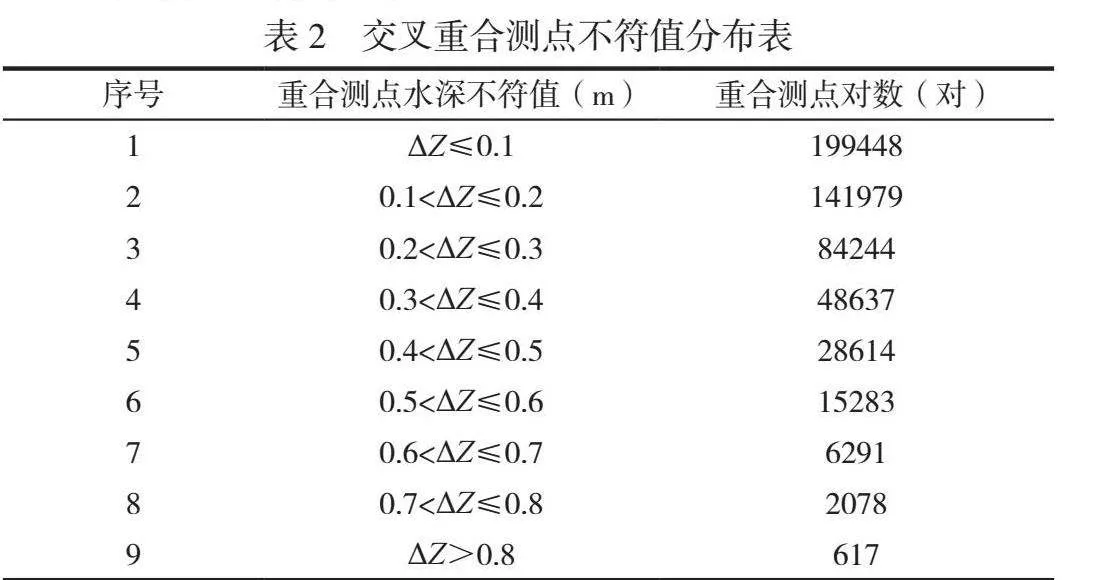
根据《海洋勘察规范第10部分:海底地形地貌勘察》(6多波束测深)(GB/T 12763.8-2007)的要求分析得出,筛选的检测线与主测线的重叠样本图上≤1.0mm(实际平面距5m内)的水深检测点数据为15822335对。ΔZ的中误差为±0.17,测区平均水深为30.75m,满足中误差≤±0.01Z的要求。其中,合格的点对数为527178对,不合格点对数为13对,合格点数占比为99.9975%,满足规范要求。其中主测线与检测线交叉重合点不符值分布。对测深检查线与主测深线相交处图上l.0mm内水深点的深度比对互差进行统计分析,如公式(5)所示。
(5)
式中:M为重合点水深不符值中误差,m;di为重合点i处的深度不符值,m;n为深主测线与联络测线的重合点数。交叉重合测点不符值分布见表2。
通过上述研究,根据多波束系统探测成果与精度分析结果可知,本次探测的总点数超过1582万个,多波束系统探测的总点数与反馈的有效点数差值为13个,占总点数的0.01%,即探测中不满足需要的探测点数极少。由此可以说明,此次提出的多波束系统应用效果极好。
7 结语
多波束系统是由多个传感器组合的高度集成化系统,与单波束探测技术相比,在深水海域能实现大范围、高精度和全覆盖,成果精度更满足规范和市场实际需求,具有一定的先进性和实用性,在高新科研领域和科研工作的持续推进下取得了显著成绩。
参考文献
[1]任建福,韦忠扬,张治林,等.EM2040C多波束系统在采砂量监测中的应用[J].测绘通报,2021(10):136-140.
[2]邹庆国,刘鹤,余青海,等.某新型深远海救助船深水多波束系统基座制作及安装[J].广东造船,2023,42(2):71-74.
[3]马郑海,林荡,李胜宣,等.基于多波束系统的荆江门河段水下地形测绘[J].水利水电快报,2022,43(12):36-40.
[4]刘晓健,崔乃刚,刘雪峰,等.基于海洋环境噪声水下探测研究进展[J].数字海洋与水下攻防,2022,5(6):518-523.
[5]刘森波,丁继胜,冯义楷,等.便携式多波束系统在消力池冲刷检测中的应用[J].人民黄河,2022,44(7):128-131.
[6]王友东,李海兵,付碧波,等.一种模块化水下探测拖体的设计与实现[J].舰船电子工程,2022,42(6):190-193.
[7]张建兴,宋永东,杜增丰,等.SeaBeam 3030多波束系统在南海冷泉调查中的应用[J].海洋科学,2022,46(1):154-162.
