
无人机低空摄影测量技术在水利工程测量中的应用研究
2024-11-25 00:00张津
科技资讯 2024年20期
摘要:以某水利工程为例,探究了大疆经纬M300无人机低空摄影测量技术在该测区的应用。在基本控制测量与无人机低空摄影测量的基础上,对内业数据依次进行影像纠偏、空三加密、平差解算等处理,同时结合外业调查调绘资料绘制测区地形图。从精度评估情况看,空三加密精度和地形图精度均符合工程需要,为水利工程的建设与维护提供了参考。
关键词:无人机低空摄影测量水利工程空三加密外业测绘
中图分类号:P27
ResearchontheApplicationofUAVLowAltitudePhotogrammetryTechnologyinWaterConservancyEngineeringSurveying
ZHANGJin
CangzhouWaterResourcesSurveyandPlanningDesignInstituteCo.,Ltd.,Cangzhou,HebeiProvince,050051China
Abstract:Takingacertainwaterconservancyprojectasanexample,thispaperexplorestheapplicationofLowAltitudePhotogrammetrytechnologyusingtheDJIM300UnmannedAerialVehicle(UAV)inthesurveyarea.OnthebasisofbasiccontrolmeasurementandUAVlowaltitudephotogrammetry,imagecorrection,aerialtriangulation,adjustmentcalculationandotherprocessingarecarriedoutoninternaldatainsequence,whiledrawingtopographicmapsofthesurveyareabasedonfieldsurveyandmappingdata.Fromtheaccuracyevaluation,itcanbeseenthattheaccuracyofaerialtriangulationandtopographicmapbothmeettheengineeringneeds,providingareferencefortheconstructionandmaintenanceofwaterconservancyprojects.
KeyWords:UAVlowaltitudephotogrammetry;Waterconservancyengineering;Aerialtriangulation;Fieldsurveyandmapping
随着民用无人机技术的成熟,无人机低空摄影测量被广泛应用到城市规划、文物保护、应急测绘、工程测量等领域。无人机低空摄影测量系统包含了飞行平台、飞控系统以及数据传输系统等,可以支持在线规划航线、远程控制飞行、自动进行数据处理和自动成图等功能。在应用该技术进行水利工程测量时,除了使用无人机进行低空摄影测量获取影像数据外,还要使用GPS(GlobalPositioningSystem,GPS)、RTK(Real-timekinematic,RTK)等设备进行外业调查调绘,将内业与外业资料相结合制成的地形图精度更高、内容更加丰富,相应的对于工程建设具有更高的参考价值。
1测区概况
某地拟建水库高程在1007~1288m之间,有防洪、发电、灌溉等功能。测区纵向范围为坝址轴线上游3.6km至下游2.5km,横向范围为坝肩至塬面以外12m。测区地表植被以低矮灌木为主,但是受地形影响通视条件不良。为更高效率获取更加精确的测量数据,在本工程中应用了无人机低空摄影测量技术,使用设备为大疆经纬M300型无人机,最快飞行速度23m/s,最大续航时间55min,录像分辨率1080p。
2无人机低空摄影测量技术的应用
无人机低空摄影测量是通过提前规划测区路线的方式,让无人机在航高1000m以下定向飞行并完成数字摄影测量。将控制测量资料与无人机低空摄影测量资料相结合,在空中三角处理的基础上建立测区的三维模型,同时结合外业补测及调绘信息编辑地形图,以可视化形式呈现最终成果。
2.1控制测量
基于“先像控后航测”思路,在测区内布置了18个GPS标识点,联测3个C级平面控制点和2个Ⅱ等高程点,所有操作内容均严格按照《水利水电工程测量规范(SL197-2013)》进行。高程控制采用五等几何水准测量成果,使用GPS-RTK方式联测像控点三维坐标[1]。为消除误差,采用3次测量结果的平均值作为像控点最终成果。
2.2航空摄影
2.2.1航摄设计与成果
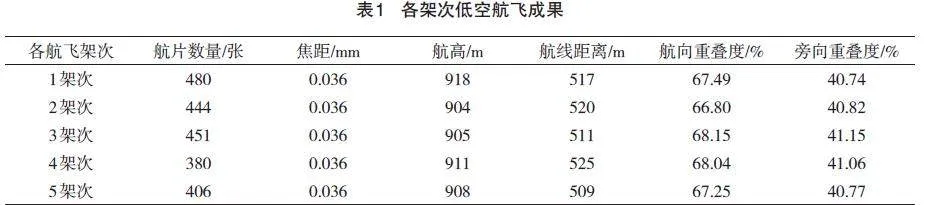
本次无人机低空摄影测量任务选用大疆经纬M300无人机,搭载SonyA7RⅡ定焦单反相机,焦距35.1mm,像元大小4.6μm。工作人员通过无人机地面控制软件规划航测线路,并设定旁向重叠度、航向重叠度、飞行速度等主要参数。分5个架次共30条航带进行航摄,累计获得相片2161张,航飞成果如表1所示。
2.2.2像控点布置
像控点布设方法选择“区域网布点法”,测区范围内共设置25个像控点,全部分布在无人机航向和旁向6片重叠范围内。在确定像控点位置时,优先考虑地势平坦、视野开阔的区域,原则上不得选择烟囱、电线杆以及高大建筑物作为像控点。在像控点处用白石灰作“十”字标记,以便于无人机拍摄。
2.3外业测绘
本次测量任务重外业调查测绘工作主要包括两方面:一是水工建筑物的调查测量,测量对象包括测区范围内的淤地坝和溢流坝的坝顶高程,以及临水坡脚高程;获取抽水泵站的位置、管径等参数。二是地形图调绘,结合拼接影像在测区内开展了实地调绘,主要目标包括村庄名称;房屋属性以及道路材质、电线敷设路径等[2]。
2.4内业数据处理
2.4.1影像纠偏
影像纠偏处理流程如下:运行ArcGIS软件后,点击菜单栏中的“加载”选项,在新弹出的对话框中添加需要纠偏配准的影像数据。数据加载完毕后,进入ArcGIS软件的工具箱并选择“影像处理工具”,展开该部分并单击选择“纠偏”子工具,进入相应的窗口。在该窗口中设置纠偏方法、纠偏参数后,即可完成对影像数据的纠偏配准。将鼠标移动至配准后的影像图片上,单击右键选择“导出数据”,然后选择另存路径,保存配准后的影像数据。
2.4.2空三加密
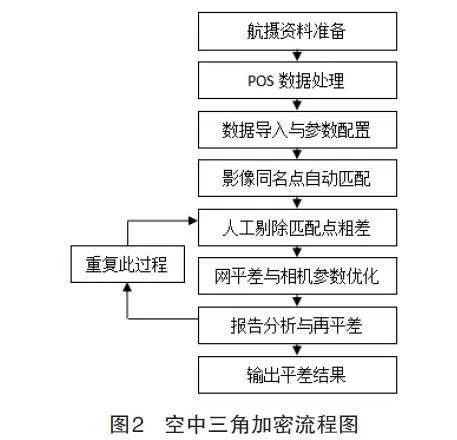
本文使用VirtuoZo数字摄影测量工作站提供的Inpho软件完成空中三角加密,作业步骤如图2所示。
在空三加密中,通过计算机自动匹配的方式测量加密点,要求加密点尽可能的均匀分布在像片中,航带连接点的每张像片中加密点数量不得少于3个。在确定加密点具体位置时,采用4×4标准位置选点方法,要求每个区域内的标准点数量不得少于4个,达到降低模型连接差和航带连接差的目的。平差解算也是空三加密中的重要步骤,可通过Inpho软件自带的平差解算工具完成该项工作,经过剔除粗差、迭代计算、人工编辑后,保证输出的平差结果有更高的精度[4]。
2.4.3数据生产
使用测绘软件生成数字高程模型(DigitalElevationModel,DEM)和数字正射影像(DigitalOrthophotoMap,DOM)。通过手脚轮盘等工具配合JX4等线画图采集软件,绘制出线画图采集成果。将处理完毕的数据导入测绘数据编辑软件CASS中做进一步处理,包括数据编辑、属性设定、数据转换等,完成全部处理任务后保存到数据库中[5]。
2.5精度评估
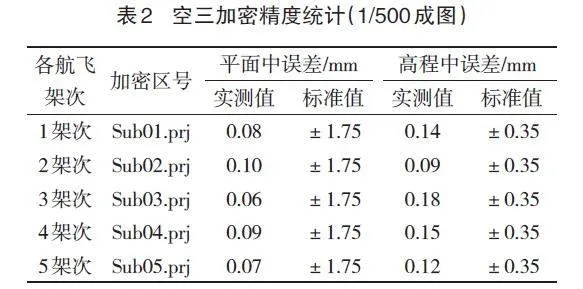
精度评估包括两方面内容,一是空三加密精度评估,二是地形图精度评估。将检查点数据导入到空三模型中并评估模型精度,结果如表2所示。
由表2数据可知,该空三加密的平面中误差与高程中误差的实测值均在标准限值以内,说明成图精度可靠,能够满足工程需要,验证了无人机低空摄影测量技术在该水利工程测量中的应用效果。
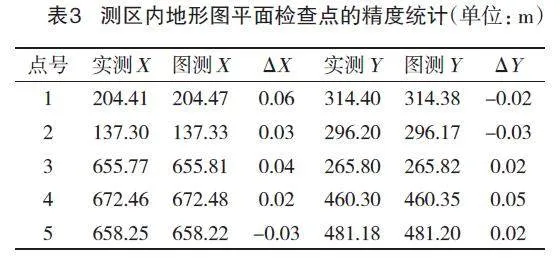
根据《数字测绘成果质量检查与验收》(GB/T18316—2008)中相关规定对本次测量所得1:500地形图进行检查,同时参考外业检查点对地形图精度进行评定。测区内共有25个平面检查点,统计各个检查点的精度。这里选取前5个检查点,精度统计结果如表3所示。
由表3数据可知,平面检查点误差在0.02~0.06m之间,满足比例尺1:500地形图的精度要求。
3结语
本文使用无人机低空摄影测量技术对某水利工程进行测量,绘制了测区的空三模型和地形图。精度检测结果表明,无论是空三加密精度还是地形图平面检查点精度均符合标准中规定的限值,证明在该工程中无人机低空摄影测量技术得到了成功应用。
参考文献
[1] 王培荣.基于低空无人机航空摄影测量技术的国土空间生态修复规划研究[J].产业创新研究,2023(6):93-95.
[2] 宁钢华.数字无人机低空摄影测量技术在城镇地籍测量与管理中的应用[J].数字技术与应用,2020(5):257-258.
[3] 尹素秀.无人机低空摄影测量在城市测绘保障中的应用前景探究[J].西部资源,2023(4):151-153.
[4] 吴申尧.植被密集区无人机载LiDAR航线优化方法研究[D].重庆:重庆交通大学,2024.
[5] 龚洲.基于航摄实景三维的地质灾害调查与稳定性分析研究[D].重庆:重庆交通大学,2024.
