一种基于幅度相位信息辅助的多假设跟踪算法
2024-11-19 00:00:00郭玉霞孟中杰刘琪傅嘉政
航空兵器 2024年5期






摘 要: 传统多目标跟踪算法在距离拖引(Range Gate Pull Off, RGPO)干扰场景中, 由于无法有效区分真实目标和干扰, 将出现目标航迹起始错误、 跟踪误差增大、 跟踪中断等现象, 严重影响跟踪性能。 针对这一问题, 基于雷达量测的幅度和相位特征提出一种信息辅助多假设跟踪(Information Assisted Multiple Hypothesis Tracking, IA-MHT)算法。 IA-MHT算法利用了幅度、 相位信息区分目标真实量测和虚假量测, 并基于判别结果修正了全局联合假设概率和航迹得分的计算步骤, 从而提高算法的抗杂波和抗干扰性能。 在RGPO干扰场景中的仿真结果表明, IA-MHT算法能够有效区分干扰量测, 获得优于传统MHT算法的数据关联性能。
关键词: 多假设跟踪; 距离拖引干扰; 信息辅助; 航迹得分
中图分类号: TJ760
文献标识码: A
文章编号: 1673-5048(2024)05-0088-08
DOI: 10.12132/ISSN.1673-5048.2024.0078
0 引 言
雷达干扰技术种类繁多, 根据干扰能量来源不同可以分为有源干扰和无源干扰; 根据干扰效果不同可以分为压制干扰和欺骗干扰[1]。 距离拖引(Range Gate Pull Off, RGPO)干扰是一类简单高效的距离欺骗雷达干扰技术, 通过产生与真实目标径向距离不同的虚假目标, 干扰敌方雷达对真实目标的跟踪。 干扰机在产生RGPO干扰时, 通常使用数字射频存储(Digital Radio Frequency Memory, DRFM)技术生成与真实目标回波信号在频率、 波形和电磁散射特性等方面高度相似的虚假目标信号, 并通过不断调整虚假目标信号的时间延迟影响雷达对目标真实距离的测量, 从而实现干扰雷达跟踪的目的[2-3]。 RGPO干扰可以有效扰乱雷达跟踪系统对目标的探测和航迹起始过程, 导致目标航迹起始错误、 跟踪误差增大、 跟踪中断等问题。
尽管目前已有较多针对单目标的抗RGPO干扰跟踪算法, 但这类算法通常不适用于多目标与多干扰场景[4-5]。 为了解决RGPO干扰环境下的多目标跟踪问题, 文献[6]通过高信噪比量测之间的角度差判别RGPO干扰, 并利用多假设跟踪(Multiple Hypothesis Tracking, MHT)算法获得真实目标和RGPO干扰的航迹。 然而该算法在杂波密集、 干扰数量较多的场景下性能表现欠佳。 文献[7]利用回波信号的幅度特征改进基数概率假设密度(Cardinalized Probability Hypothesis Density, CPHD)滤波器的似然概率计算方法, 提高了算法在干扰环境下的势估计准确度。 然而CPHD算法无法直接提供目标航迹序号, 在实际应用中存在不便。 文献[8]提出一种利用稀疏分解系数和双谱特征区分目标和RGPO干扰的MHT算法, 获得了良好的跟踪性能。 然而使用神经网络融合特征也导致该算法计算复杂度较高。
上述抗RGPO干扰多目标跟踪算法在跟踪性能、 应用便利程度等方面仍存在不足。 针对RGPO干扰环境下的多目标跟踪问题, 本文提出一种基于幅度和相位信息辅助的多假设跟踪算法。 该算法利用雷达信号的幅度和相位信息实现目标真实量测和干扰量测的区分, 改进了传统MHT算法的数据关联和航迹得分计算方法, 从而提高MHT算法的抗杂波、 抗干扰能力, 使雷达目标跟踪系
统在RGPO干扰环境下获得更高的跟踪精度和稳定性。
1 问题描述
在典型的RGPO干扰场景中, 真实目标、 杂波和
收稿日期: 2024-05-11
*作者简介: 郭玉霞(1979-), 女, 河南滑县人, 研究员。
RGPO干扰量测在空间中的分布如图1所示。 其中, 干扰量测与真实目标量测的方位角基本一致, 但径向距离不同。 本文所研究的问题可以描述为在RGPO干扰场景中, 基于MHT算法框架和量测辅助信息实现对多个机动目标的准确跟踪。
1.1 TOMHT算法
航空兵器 2024年第31卷第5期
郭玉霞, 等: 一种基于幅度相位信息辅助的多假设跟踪算法
MHT是一种通过计算量测序列源自不同目标的概率, 从而基于延迟决策进行数据关联的多目标跟踪算法。 根据实现方式的不同, MHT算法可分为面向假设的MHT(Hypothesis-Orientated MHT, HOMHT)[9-10]和面向航迹的MHT(Track-Orientated MHT, TOMHT)两类[11]。 其中, HOMHT算法采用“自顶向下”的设计思路, 直接通过计算量测-目标全局联合关联假设的概率求出最优假设; 而TOMHT算法采用“自底向上”的结构, 首先产生可能的量测-航迹关联假设, 再利用似然概率计算航迹得分, 最后利用多维分配算法求出最优的全局联合关联假设。 TOMHT算法因计算资源消耗少、 实现较为简单、 可直接获得航迹等优点获得更广泛的应用。
航迹得分的计算是TOMHT算法的核心步骤。 令Θk, l表示k时刻的第l个联合关联假设, Zk={Z(1), Z(2), …, Z(k)}表示由初始时刻累积至k时刻的量测集合, 则可以使用贝叶斯公式计算k时刻全局联合假设的概率。
P{Θk, l|Zk}=1cP{Z(k)|θ(k), Θk-1, s, Zk-1}·
P{θ(k)|Θk-1, s, Zk-1}P{Θk-1, s|Zk-1}(1)
式中: Θk-1, s为Θk, l的父联合关联假设; k时刻量测集合Z(k)的关联假设记作θ(k); c为归一化常数。 TOHMT算法通常使用对数似然比(LLR)将式(1)中的累乘简化为累加运算获得航迹得分; 再经过航迹分簇、 最优分配等步骤进行数据关联; 最终通过航迹树剪枝、 航迹更新等步骤输出跟踪结果[12]。 TOMHT算法的完整流程如图2所示。
1.2 雷达量测的幅度和相位信息
传统多目标跟踪算法由于仅使用了雷达量测的位置信息, 无法在RGPO干扰场景中有效地区分目标真实量测和干扰, 导致算法的关联准确度降低、 虚假航迹数量增多、 航迹维持性能下降。 为解决上述问题, 本文使用雷达量测的幅度和相位信息进行似然比检验以辅助判别量测的来源, 一方面减小干扰和杂波对TOMHT算法关联性能的影响, 另一方面降低算法后续步骤的计算复杂度。
已有研究表明, 窄带雷达量测中包含的幅度信息可以使用瑞利分布模型描述[13], 具体模型描述如下: 假定生成量测时信号(包络)幅度为q, 并对杂波(含噪声)进行归一化处理, 则对于目标不存在的H0假设, 杂波所产生虚假量测幅度q的概率密度函数为
p0(q)=qexp-q22, q≥0 (2)
对于目标存在的H1假设, 量测幅度q的概率密度函数为
p1(q)=q1+dexp-q22(1+d), q≥0 (3)
式中: d为目标信噪比期望值。 将参数d视为先验信息, 则利用幅度信息判断量测源于目标或杂波的似然比检验表示为
Λ(q)=lgp1(q)p0(q)=-lg(1+d)+dq22(1+d)H1H0η1 (4)
在实际应用中, 由于回波信号的期望功率会随着目标姿态角的变化而发生改变, 信噪比参数1+d的准确数值是难以获取的。 假定d(以dB为单位)在区间[d1, d2]中均匀分布, 可以推导出目标量测幅度的似然函数为[14]
p1(q)=2exp-q22(1+d2)-exp-q22(1+d1)q[lg(1+d2)-lg(1+d1)], q≥0(5)
在似然比检验中使用式(5)代替式(3), 可以降低参数d设置错误对判断结果造成的不利影响。
利用量测幅度信息可以辅助TOMHT算法排除杂波干扰, 提高数据关联的准确性。 然而当目标释放RGPO干扰时, 干扰量测的幅度特征很可能与真实量测高度相似, 使得基于幅度信息似然比检验的判别方法失效。 为了提高TOMHT算法对抗RGPO干扰的能力, 需要利用干扰信号和真实目标信号之间的相位特征差异识别干扰量测, 提高关联正确率并减少虚假航迹数量。
现代雷达干扰系统多采用DRFM作为核心组件, DRFM的主要功能是将接收到的射频信号数字化, 以便存储、 处理、 重建射频信号, 最终产生干扰对方跟踪雷达所需的信号[15]。 常见的距离拖引、 速度拖引等干扰形式均可以通过DRFM系统实现[16]。 由于DRFM对模拟信号进行了数字化处理, 其采样数、 量化位数等参数会影响射频信号的重建准确度, 这一特性使得利用DRFM信号与目标真实信号之间的相位差异区分目标和干扰量测成为可能。 文献[17]定义了干扰误差角度μ, 用于评估DRFM所产生的干扰信号和真实信号之间的差异。 若目标信号和干扰信号在一个雷达脉冲重复周期的采样序列分别为x=[x(0), x(1), …, x(K-1)]T, y=[y(0), y(1), …, y(K-1)]T, 其中:
x(n)=ej2πfDn(6)
y(n)=∑1/2Nf0」m=-1/2Nf0」sincm+1Nej(Nm+1)2πf0n(7)
cosμ=cos(x, y)=|xHy|‖x‖·‖y‖(8)
式中: μ为干扰误差角; fD表示目标的归一化多普勒频率; f0为DRFM归一化频率; K表示雷达在一个脉冲重复周期内的信号采样次数; N=2M, M表示量化位数。
由于干扰信号向量通常无法直接获得, 可以使用量测信号计算干扰误差角[17]。 将量测信号向量表示为z=[z(0), z(1), …, z(K-1)]T, 则有二元检验模型:
H1: z=n+αp
H2: z=n+βpjam (9)
式中: H1表示信号来自目标, H2表示信号来自干扰源; n~CN(0, M)为复高斯噪声向量; α~CN(0, σ2α), β~CN(0, σ2β)为复高斯随机变量; 基于目标信号采样可构建目标的导向矢量为p=[ej2πfD×0, …, ej2πfD×(K-1)]T; 干扰信号的未知导向矢量为pjam。 则代入式(8)可得干扰误差角的表达式为
μ=arccospHM-1z(pHM-1p)(zHM-1z) (10)
基于上述讨论可知, 根据DRFM量化位数、 采样次数等先验信息适当设定门限, 能够利用干扰误差角μ实现对RGPO干扰量测的判别。 可通过自适应相干检测器(Adaptive Coherent Estimator, ACE)设置干扰误差角检测门限[18]。
2 信息辅助多假设跟踪
为了改善传统TOMHT算法在RGPO干扰下的性能表现, 本文首先利用雷达量测的幅度、 相位信息辅助区分目标、 干扰和杂波量测, 提高量测来源判别的准确性; 再根据判别结果对航迹得分的计算步骤进行调整, 从而分离目标和RGPO干扰的数据关联过程; 最终建立基于信息辅助的抗干扰多假设跟踪(Information Assisted MHT, IA-MHT)算法。 以下重点对航迹得分的计算过程进行说明。
输入IA-MHT算法的量测Z(k)包含位置信息Zp(k)和幅度信息Za(k), 因此可以将全局假设概率式(1)中等号右侧的第一项进一步分解为
P{Z(k)|θ(k), Θk-1, s, Zk-1}=
P{Zp(k)|θ(k), Θk-1, s, Zk-1}·
P{Za(k)|θ(k), Θk-1, s, Zk-1}(11)
对于被判别为来自杂波的量测, 幅度似然函数P(Za(k)|θ(k), Θk-1, s, Zk-1)可使用式(2)计算; 对于被判别为来自目标或干扰的量测, 似然函数可使用式(5)计算。 由于量测之间相互独立, 位置量测的似然函数可以分解为累乘形式:
P{Zp(k)|θ(k), Θk-1, s, Zk-1}=
∏m(k)j=1{fj[zj(k)|Θk-1, s, Zk-1]} (12)
假定虚警、 新目标和新干扰在量测空间中均匀分布, 并且滤波模型服从高斯假设, 则有
fj[zj(k)|Θk-1, s, Zk-1]=
1/V, 量测由虚警或新目标、 新干扰产生
N(zj(k)-z^t(k), St), 量测来自已确认目标
N(zj(k)-z^f(k), Sf), 量测来自已确认干扰 (13)
式中: V表示量测空间体积; z^(k)为位置量测的预测均值; S为新息协方差矩阵。
在k时刻, 关联假设θ(k)对共计m(k)个量测进行分配, 如表1所示。 则θ(k)的先验概率可分解为两部分:
P{θ(k)|Θk-1, s, Zk-1}=P{θ(k)|τ, , ν, ξ, ψ, Θk-1, s, Zk-1}=P{θ(k)|τ, , ν, ξ, ψ}·P{τ, , ν, ξ, ψ}(14)
假定各个关联假设的先验概率相等, 则有
P{θ(k)|τ, , ν, ξ, ψ}=
[Pm(k)τ+ξ·C+ν+ψν·C+ψψ]-1=
m(k)!(m(k)-τ-ξ)! (+ν+ψ)!ν!(+ψ)! (+ψ)!ψ!!-1=
!ν!ψ!m(k)! (15)
P{τ, , ν, ξ, ψ} =∏t{[PDt (k)]δt[1-PDt(k)]1-δt}·
∏f{[PDf(k)]δf[1-PDf(k)]1-δf}·
p()pν(ν)pψ(ψ)(16)
式中: 变量δt和δf用于指示当前时刻雷达是否探测到某条航迹。
δt=0, 若没有量测与目标航迹t相关联
1, 若有量测与目标航迹t相关联 (17)
δf=0, 若没有量测与干扰航迹f相关联
1, 若有量测与干扰航迹f相关联 (18)
将式(11)~(16)代入式(1), 可得到全局关联假设概率的表达式:
P{Θk, l|Zk}=1c !ν!ψ!m(k)!p()pν(ν)pψ(ψ)·
∏m(k)j=1{ftj[zj(k)|Θk-1, s, Zk-1]}·
∏t{[PDt(k)]δt[1-PDt(k)]1-δt}·
∏f{[PDf(k)]δf[1-PDf(k)]1-δf}·
P{Θk-1, s|Zk-1}(19)
假定杂波信号数量、 新目标数量ν和新干扰数量ψ均服从泊松分布, 即有概率密度函数:
p()=e-λV(λV)!(20)
pν(ν)=e-λνV(λνV)νν!(21)
pψ(ψ)=e-λψV(λψV)νψ!(22)
式中: λ表示虚警空间密度; V表示监视区域大小; λν表示新目标空间密度; λψ表示新干扰空间密度。 假定虚警、 新目标和新干扰在区域内均匀分布, 即概率密度函数为1/V, 将式(20)~(22)代入式(19), 可得到全局关联假设概率计算式:
P{Θk, l|Zk}=1c e-λVe-λνVe-λψVm(k)!(λ)(λν)ν(λψ)ψ
∏m(k)j=1{fj[zj(k)|Θk-1, s, Zk-1]}τj·
∏t{[PDt(k)]δt[1-PDt(k)]1-δt}
∏f{[PDf(k)]δf[1-PDf(k)]1-δf}P{Θk-1, s|Zk-1}=
1c′(λ)(λν)ν(λψ)ψ∏m(k)j=1{fj[zj(k)|Θk-1, s, Zk-1]}τj∏t{[PDt(k)]δt[1-PDt(k)]1-δt}·
∏f{[PDf(k)]δf[1-PDf(k)]1-δf}P{Θk-1, s|Zk-1}
(23)
在TOMHT算法中, 通常使用对数似然比计算航迹得分, 进而确定最佳的全局假设[19]。 以下推导IA-MHT算法中LLR航迹得分的计算公式, 令指示向量为τ=[τ1, τ2, …, τm(k)], 其中:
τj=0, 若量测由虚警或新目标、 新干扰产生
1, 若量测来自已确认的目标或干扰 (24)
则有
(λ)m(k)=(λ)+ν+ψ+∑m(k)j=1τj(25)
将式(23)等号右侧部分除以(λ)m(k), 再将(λ)-m(k)并入常数c中使等式保持成立, 可以得到:
P{Θk, l|Zk}=
1cλνλνλψλψ∏m(k)j=1fj[zj(k)|Θk-1, s, Zk-1]λτj·
∏t{[PDt(k)]δt[1-PDt(k)]1-δt}·
∏f{[PDf(k)]δf[1-PDf(k)]1-δf}P{Θk-1, s|Zk-1}(26)
由式(26)可推导得到新目标的似然比为
lν/=λνλ(27)
同理, 新干扰的似然比为
lψ/=λψλ(28)
目标轨迹连续(当前时刻有量测与轨迹关联)的似然比为
ltj=fj[zj(k)|Θk-1, s, Zk-1]λPDt(k)(29)
目标轨迹中断的似然比为
lt0=1-PDt(k)(30)
同理, 干扰轨迹连续的似然比为
lfj=fj[zj(k)|Θk-1, s, Zk-1]λPDf(k)(31)
干扰轨迹中断的似然比为
lf0=1-PDf(k)(32)
在IA-MHT算法中, 将上述似然比取对数, 累加计算LLR航迹得分
1(k)=1(k-1)+Δ1(k)=1(k-1)+lnl(33)
再利用序贯概率比检验(Sequential Probability Ratio Test, SPRT)进行航迹管理, 减少虚假航迹的数量[20]; 最后利用匈牙利算法求出最优的全局关联假设, 并基于航迹全局概率进行剪枝, 降低算法计算量。 需要注意真实目标和干扰目标的关联过程是相互独立的, 即仅有被判别为目标的量测会与目标航迹相关联, 仅有被判别为干扰的量测会与干扰航迹相关联。
3 仿真实验与分析
在典型RGPO干扰场景参数下进行机动目标跟踪仿真实验, 基于最优子模式分配距离(Optimal Sub-Pattern Assignment, OSPA)、 势估计、 数据关联正确率、 关联错误率、 航迹零碎度等性能评价指标[21], 对比传统TOMHT算法和本文所提出的IA-MHT算法的性能表现。 在某一时刻, 对于目标实际位置集合X={x1, …, xm}和跟踪算法所估计的目标位置集合Y={y1, …, yn}, OSPA距离定义为
d-(c)p(X, Y)=0, m=n=0
1nminπ∈Πn∑mi=1d(c)(xi, yπ(i))p+cp(n-m)1/p, m≤n
d-(c)p(Y, X), m>n(34)
式中: 1<p<∞为距离阶次; c>0为截断系数; d(c)(x, y)=min(c, d(x, y)), d(x, y)为欧氏距离; Πk表示{1, 2, …, k}的全排列; π(i)为第i种排列。 当m>n时, d-(c)p(X, Y)=d-(c)p(Y, X)。 某一时刻的势估计等于算法估计的航迹数量。 关联正确率、 错误率分别定义为跟踪过程中正确、 错误关联的量测数量与所有量测数量的比值。 航迹零碎度定义为跟踪过程中算法估计的全部航迹数量与真实航迹数量的比值。
假设目标在三维空间中运动, 状态向量为x=[x, x·, x¨, y, y·, y¨, z, z·, z¨]T, 目标运动模型表示为
x(k)=Fx(k-1)+w(k-1)(35)
式中: F为状态转移矩阵; w~N(0, Q)为零均值高斯过程噪声。 令采样周期为T, σ2Q为过程噪声的功率谱密度, 则有
F=F000
0F00
00F0(36)
Q=Q0000Q0000Q0(37)
F0=1TT2/2
01T
001(38)
Q0=σ2QT5/20T4/8T3/6
T4/8T3/3T2/2T3/6T2/2T(39)
目标量测向量为z=[zTp, q, μ]T=[r, θ, φ, q, μ]T, 其中包含位置量测zp、 幅度量测q和干扰误差角μ; 设定雷达位于坐标原点, 则位置量测模型表示为
zp(k)=h[x(k)]+vk(40)
h(x)=r~θ~φ~=x2+y2+z2arctan(y/x)
arctan(z/x2+y2)(41)
式中: v~N(0, R)为零均值高斯白噪声, 协方差矩阵R=diag([σ2r, σ2θ, σ2φ])。 幅度量测使用瑞利分布模型生成, 干扰误差角使用文献[17]中的信号模型生成。
在跟踪场景中设置两个交叉运动的目标, 目标初始状态和存活时间如表2所示, 目标1在运动过程中的加速度变化如表3所示。
目标1在第20 s释放持续10 s的RGPO干扰, 产生4个虚假目标。 在整个干扰过程中, 虚假目标的拖引距离Rrj(t)可以表示为
Rrj(t)=0, 0≤t<t1
v(t-t1)+0.5a(t-t1)2, t1≤t<t2
关闭干扰, t2≤t<t3 (42)
式中: v表示虚假目标拖引速度; a表示拖引加速度。 干扰机在0≤t<t1处于停拖期, 在t1≤t<t2处于拖引期, t2≤t<t3处于关闭期。 在仿真中设定t1=20 s, t2=30 s, t3=50 s; 虚假目标拖引速度、 加速度如表4所示。 生成仿真量测数据所需的其他参数如表5所示。
设定仿真总时长为50 s, 采样周期T=0.1 s, 根据上述仿真参数生成的真实目标和虚假目标轨迹如图3所示, 位置量测如图4所示。
使用仿真数据评估传统TOMHT算法和IA-MHT算法的性能表现。 两种算法统一使用容积卡尔曼滤波和当前统计(Current Statistic, CS)模型进行目标状态估计[22-23]。 设置新生目标空间密度为λν=10-13 km-3; SPRT航迹错误确认概率为pa=1×10-7, 航迹错误删除概率为pb=1×10-5。 IA-MHT算法的其他参数如表6所示。
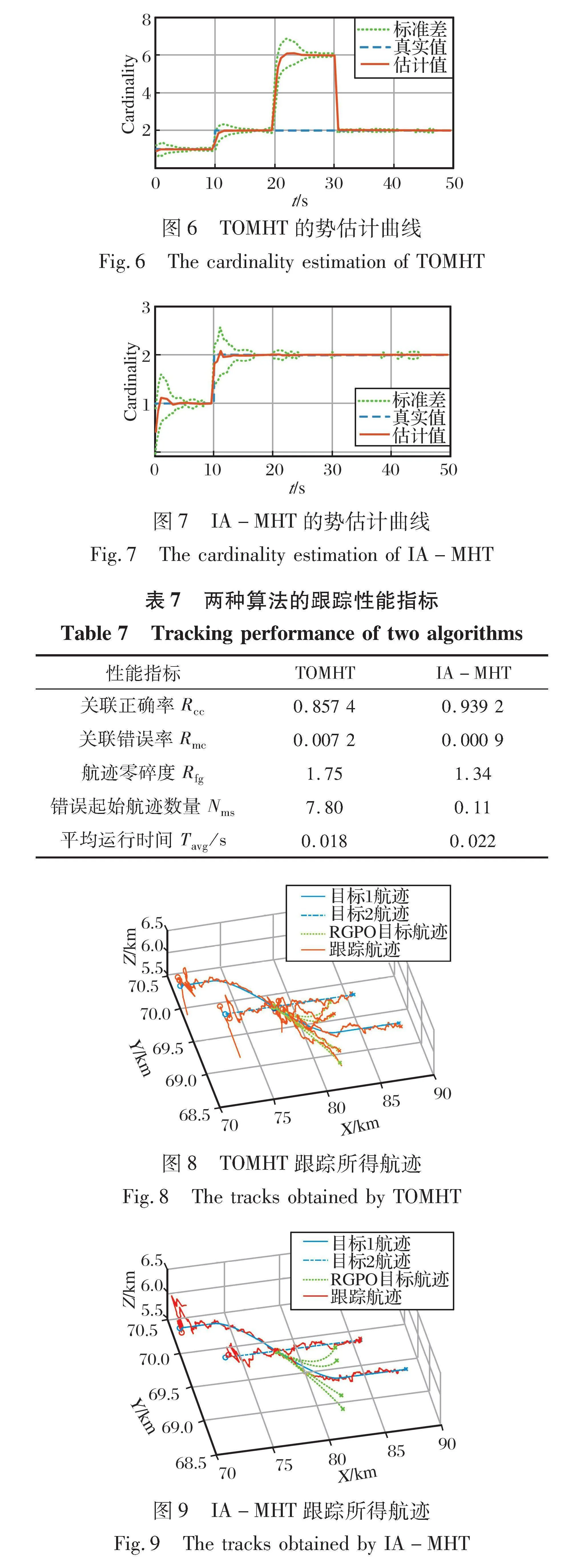
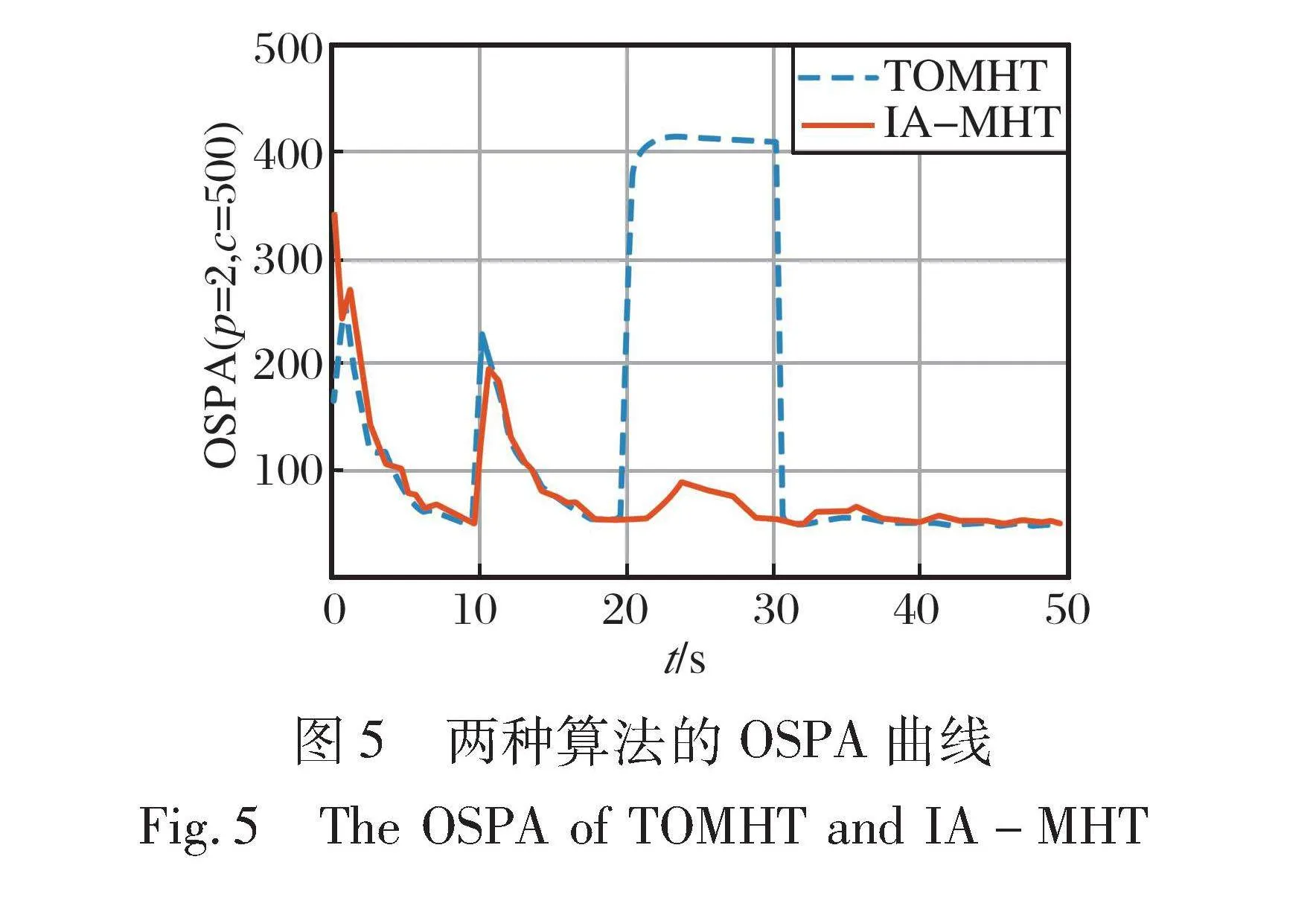
进行200次蒙特卡洛仿真, 对比TOMHT和IA-MHT算法的性能指标。 两种算法的OSPA曲线如图5所示, 势估计曲线如图6~7所示, 其他性能指标如表7所示。
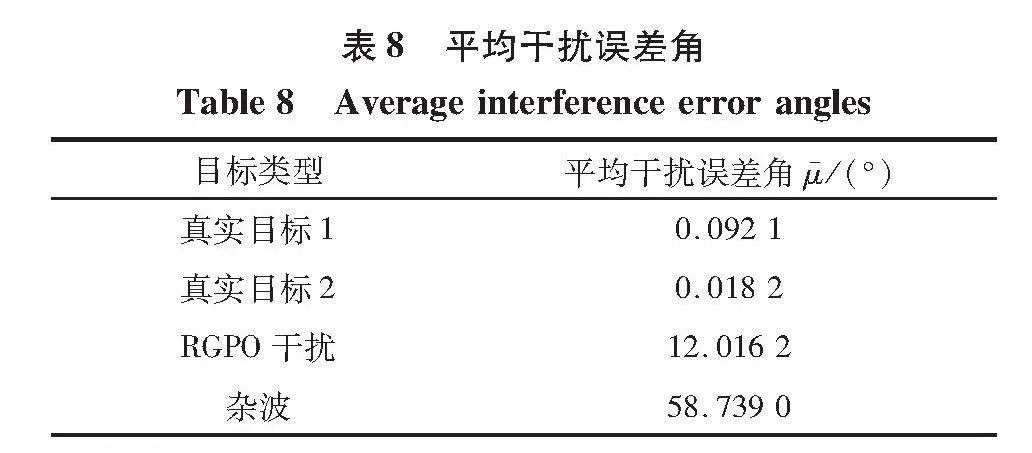
在某次仿真中, TOMHT跟踪所得航迹如图8所示, IA-MHT跟踪所得航迹如图9所示。 不同目标在跟踪过程中的平均干扰误差角如表8所示。
上述仿真结果表明, 利用干扰误差角能够有效对RGPO干扰、 杂波和真实目标进行区分。 与传统TOMHT
算法相比, IA-MHT算法能够有效利用雷达量测的幅度和相位信息辨别RGPO干扰量测, 从而使跟踪结果中错误起始航迹数量明显减少、 势估计准确度有效提高; 此外, IA-MHT算法分离了干扰和目标量测的数据关联假设生成过程, 进一步降低了关联错误率和航迹零碎度; 最后, IA-MHT算法的平均运行时间仅略高于TOMHT, 两种算法计算复杂度在同一量级, 有利于IA-MHT算法在计算资源有限的场景中得到应用。
4 结 论
本文提出了一种基于幅度和相位信息辅助的多假设跟踪(IA-MHT)算法。 该算法利用雷达信号的幅度和相位信息实现目标真实量测和干扰量测的区分, 并改进了传统TOMHT算法的数据关联和航迹得分计算步骤, 从而提高算法的抗杂波、 抗干扰能力, 使雷达目标跟踪系统在RGPO干扰环境下获得更高的跟踪精度和稳定性。 仿真实验结果表明, IA-MHT算法能够有效区分干扰量测, 降低RGPO干扰对跟踪性能造成的不利影响; 其数据关联准确度、 目标数量估计准确度、 航迹连续性等性能指标均优于传统TOMHT算法。
参考文献:
[1] 贵彦乔, 吴彦鸿, 俞道滨. 跟踪雷达干扰技术综述[J]. 兵器装备工程学报, 2017, 38(4): 141-147.
Gui Yanqiao, Wu Yanhong, Yu Daobin. Review of Jamming Techniques to Tracker Radar[J]. Journal of Ordnance Equipment Engineering, 2017, 38(4): 141-147.(in Chinese)
[2] Berger S D. Digital Radio Frequency Memory Linear Range Gate Stealer Spectrum[J]. IEEE Transactions on Aerospace Electronic Systems, 2003, 39(2): 725-735.
[3] Wang Y H, Zhang T X, Kong L J, et al. A Stochastic Simulation Optimization-Based Range Gate Pull-off Jamming Method[J]. IEEE Transactions on Evolutionary Computation, 2023, 27(3): 580-594.
[4] Cheng T, He Z S, Li Y X. An Effective Target Tracking Algorithm with Anti-RGPO Ability[C]∥10th IEEE International NEWCAS Conference, 2012: 117-120.
[5] Hou J, Yang Y, Chen Y, et al. Multiple Hypothesis Tracker in the Presence of RGPO/RGPI Using Amplitude Information[C]∥19th International Conference on Information Fusion, 2016: 703-710.
[6] Blackman S S, Dempster R J, Busch M T, et al. IMM/MHT Solution to Radar Benchmark Tracking Problem[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(2): 730-738.
[7] Clark D, Ristic B, Vo B N, et al. Bayesian Multi-Object Filtering with Amplitude Feature Likelihood for Unknown Object SNR[J]. IEEE Transactions on Signal Processing, 2010, 58(1): 26-37.
[8] Hou J, Yang Y, Wang Z W, et al. Multiple Hypothesis Tracking in the Presence of Deception Jamming Based on Multi-Feature Fusion[C]∥20th International Conference on Information Fusion, 2017: 1-8.
[9] Reid D. An Algorithm for Tracking Multiple Targets[J]. IEEE Transactions on Automatic Control, 1979, 24(6): 843-854.
[10] Cox I J, Hingorani S L. An Efficient Implementation of Reid’s Multiple Hypothesis Tracking Algorithm and Its Evaluation for the Purpose of Visual Tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18(2): 138-150.
[11] Kuiren T. Issues in the Design of Practical Multitarget Tracking Algorithms [M]∥Bar-Shalom Y. Multitarget-Multisensor Tracking: Advanced Applications, Norwood: Artech House, 1990: 43-87.
[12] 王子微, 孙进平, 赵楚楚. 基于核密度杂波估计的改进MHT算法[J]. 信号处理, 2021, 37(6): 991-999.
Wang Ziwei, Sun Jinping, Zhao Chuchu. An Improved MHT Method Based on Kernel Density Clutter Estimation[J]. Journal of Signal Processing, 2021, 37(6): 991-999.(in Chinese)
[13] Lerro D, Bar-Shalom Y. Automated Tracking with Target Amplitude Information[C]∥American Control Conference, 1990: 2875-2880.
[14] Chen T, Yang P, Peng H, et al. Multi-Target Tracking Algorithm Based on PHD Filter Against Multi-Range-False-Target Jamming[J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 859-870.
[15] Zhou C, Liu Q H, Chen X L. Parameter Estimation and Suppression for DRFM-Based Interrupted Sampling Repeater Jammer[J]. IET Radar, Sonar & Navigation, 2018, 12(1): 56-63.
[16] 樊会涛, 张蓬蓬. 空空导弹面临的挑战[J]. 航空兵器, 2017(2): 3-7.
Fan Huitao, Zhang Pengpeng. The Challenges for Air-to-Air Missile[J]. Aero Weaponry, 2017(2): 3-7.(in Chinese)
[17] Greco M, Gini F, Farina A. Radar Detection and Classification of Jamming Signals Belonging to a Cone Class[J]. IEEE Transactions on Signal Processing, 2008, 56(5): 1984-1993.
[18] Kraut S, Scharf L L, Butler R W. The Adaptive Coherence Estimator: A Uniformly Most-Powerful-Invariant Adaptive Detection Statistic[J]. IEEE Transactions on Signal Processing, 2005, 53(2): 427-438.
[19] Bar-Shalom Y, Blackman S S, Fitzgerald R J. Dimensionless Score Function for Multiple Hypothesis Tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(1): 392-400.
[20] Blackman S S. Multiple Hypothesis Tracking for Multiple Target Tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1): 5-18.
[21] Li Q, Sun J P, Sun W. An Efficient Multiple Hypothesis Tracker Using Max Product Belief Propagation[C]∥20th International Conference on Information Fusion, 2017: 1-6.
[22] Arasaratnam I, Haykin S. Cubature Kalman Filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.
[23] Zhou H R, Kumar K S P. A "Current" Statistical Model and Adaptive Algorithm for Estimating Maneuvering Targets[J]. Journal of Guidance, Control, and Dynamics, 1984, 7(5): 596-602.
Multiple Hypothesis Tracking Algorithm Based on Amplitude-Phase
Measurement Information Assistance
Guo Yuxia1, 2, 3*, Meng Zhongjie2 , Liu Qi4, Fu Jiazheng1, 3
(1. China Airborne Missile Academy, Luoyang 471009, China;
2. School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China;
3. National Key Laboratory of Air-based Information Perception and Fusion, Luoyang 471009, China;
4. Project Center of Air Force Equipment Department, Beijing 100843, China)
Abstract: In range gate pull off (RGPO) jamming scenarios, conventional multiple target tracking algorithm can not effectively distinguish the RGPO deception from real target measurements, resulting in track mis-initialization, increased tracking error, and tracking discontinuity. This paper proposes an information-assisted multiple hypothesis tracking (IA-MHT) algorithm to solve the above problems. The IA-MHT algorithm utilizes amplitude and phase information of radar measurements to distinguish between true and false measurements of targets. Furthermore, the algorithm adjusts the calculation method of global association hypothesis probabilities and track scores, which improves the tracking performance under clutter and RGPO interferences. Simulation results show that the IA-MHT algorithm can effectively distinguish the RGPO deception measurements and obtain superior data association performance compared to the conventional MHT algorithm.
Key words: multiple hypothesis tracking; range gate pull off jamming; information assistance; track score