基于RecurDyn的小型履带式动力底盘设计与仿真分析
2024-11-05 00:00宫庆福宋月鹏郭晶马伟黄永强王璨任龙龙
农业工程 2024年10期






关键词:丘陵山地;履带式动力底盘;结构设计;RecurDyn;仿真分析
0 引言
我国的果园种植面积与规模均处于世界前列,是世界上主要的水果生产国之一,果品经济已经成为实现乡村振兴的重要支柱产业[1]。然而,我国整体农业机械化水平较低,特别是丘陵山地果园机械化处于发展初期阶段[2-3]。动力底盘对农业生产、提高生产效益、推动农业现代化等具有重要的意义,尤其是在丘陵山地果园中[4]。相比于轮式动力底盘和仿形动力底盘,履带式动力底盘对作业环境的适应性更强,转向灵活,具有较好的机动性,也可以提供更大的接触面积,减少对地面的冲击,减少打滑和倾覆的可能性[5]。
国外对履带式农机研究较早且取得了较多成果。近年来随着国家政策的大力支持,履带式农机也成为了我国研究的重点方向。MOCERAF等[6]利用动力学软件建立了农用履带车辆的多体动力学模型,并深入研究了其转弯等运动特性。王锋等[7]针对南方丘陵果园现有机械通过性差、稳定性不好等问题,研制了一种三角型履带式动力底盘,可以跨越500mm宽度的壕沟和528mm高度的障碍物。贾鑫等[8]利用动力学RecurDyn仿真模型研究发现软坡路面环境和履带车辆转向性能的关系,为履带车辆转向系统设计及其软坡路面转向特性分析提供了参考。
现有的履带式动力底盘以大中型为主,由于丘陵山地果园种植环境较为恶劣、空间郁闭,严重降低了丘陵山地果园大中型履带式动力底盘的作业质量[9]。为解决此问题,本研究设计了一种适用于丘陵山地果园的小型履带式动力底盘,其爬坡通过性和越障性能良好,进一步提升了我国丘陵山区果园机械化作业的管理水平。
1 设计与分析
1.1 设计要求
丘陵山区地形复杂且环境郁闭,路面环境崎岖不平,很大程度上降低了大中型农机的适用性,因此本研究基于丘陵山地果园作业环境,设计了一种小型履带式动力底盘。其具体设计要求有以下4项。
(1)具备较好的爬坡越障能力,在丘陵山地果园作业时具有较好的稳定性,行驶速度0~4km/h,爬坡角度能够达到30°。
(2)外形尺寸较小,能够适应北方丘陵果园种植特点,在丘陵果园郁闭的行间作业时,能够通过1.2m行距的狭小果园空间。
(3)有一定的装载能力,能够作为果园采摘田间运输车使用,整机空载质量≤200kg,满载质量≤300kg。
(4)能够挂载其他附属农机具,如挂载割草机、旋耕机、喷药机等,降低小型履带式动力底盘的闲置率,实现一机多用的功能。
1.2 关键工作参数设计
1.2.1 行驶速度
小型履带式动力底盘旨在解决在狭隘郁闭的果园采摘后的人工运输劳动强度大的问题,根据丘陵山地果园机械作业要求,为了适应环境的变化,最大作业速度设定1.2m/s、初始速度0.2m/s。
1.2.2 履带选型及参数
目前,常用的履带式动力底盘类型包括半履带式和全履带式。半履带式动力底盘的设计和制造相对容易且易于维护;全履带式动力底盘接地比压较小、具有出色的通过性能及适应复杂作业场地的优势。在结构上,履带式动力底盘通常采用普通型、倒梯形型和三角型等不同设计,三角型履带式动力底盘具有更好的稳定性和良好的越障性能,适应性强[10]。在履带的材料选择方面,履带可分为链条式金属履带和橡胶履带,橡胶履带主要应用在小型农用机械。根据本研究的设计需求,最终选择全履带式三角型结构的橡胶履带。根据设计公式,可以计算履带的节距、接地长度参数。
在履带的节距计算中,系数取值15,满载整机质量取理论最大质量250kg,经过计算可得履带节距60mm,接地长度700mm。
1.2.3 支撑轮间隙
支撑轮的作用是分散质量、增加稳定性、提高机动性和帮助负载均匀分布。支撑轮的间隙大小对于履带的受力和行驶稳定性具有影响,支撑轮的间隙值应该尽量避免与履带节距的整数倍相符[11]。根据经验公式得
1.2.4 履带接近角和离去角
接近角和离去角是主要影响小型履带式动力底盘通过能力的参数,其角度大小能够影响其越障性能,因此接近角和离去角不宜过大或者过小,根据经验设计的小型履带式动力底盘的接近角χ=45°、离去角Φ=30°,如图1所示。
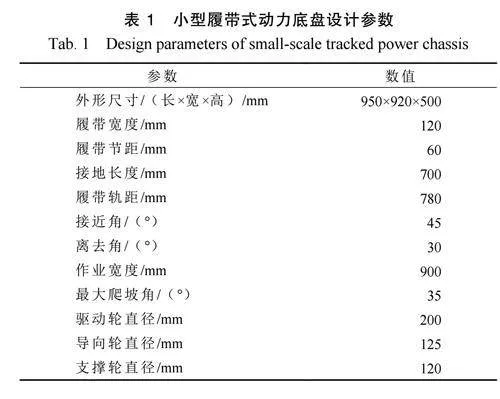
综合考虑丘陵山地果园环境因素与小型履带式动力底盘行走的稳定性,确定小型履带式动力底盘的设计目标与参数。首先,选用Q235合金钢作为小型履带式动力底盘主体材料,保证其强度和刚度能够满足作业需求;其次,设计的小型履带式动力底盘越障能力强,机动灵活,可以搭载多种作业属具。小型履带式动力底盘的主要设计参数如表1所示。
1.3 动力系统设计与选型
电机在履带行走动力系统中起关键的作用,其性能直接影响车辆的行驶能力和适应性[12]。电机是履带行走系统的主要动力源,可以提供精确的速度和方向控制,通过调整电机的输出,作业人员可以精确控制履带行走系统的运动,使其适应不同的地形和作业需求。本研究选用两个电机作为小型履带式动力底盘的动力来源,通过控制电机来实现小型履带式动力底盘的驱动功能。
小型履带式动力底盘在丘陵山区的作业环境中,直行、转向和爬坡是常见的工作状态,其中在爬坡作业时所需的功率最大,因此,选定电机的功率应基于小型履带式动力底盘在爬坡行驶中所需的最大功率。在爬坡作业时,小型履带式动力底盘所需的功率按式(4)计算。
根据设计需求和公式计算,选择两台功率均为1kW的电机提供动力。由于直流无刷电机控制简单、可调速范围较广、启动时力矩较大、稳定性好且抗干扰能力强,考虑到小型履带式动力底盘在丘陵山地的工作性能和制造成本,本研究选用功率1kW的两个直流无刷电机。
2 仿真模型建立与参数设置
2.1 拓扑结构分析
在软件中对小型履带式动力底盘建模时,在确定各部件的运动关系与实际作业工况一致的前提下,需要对建立的模型进行简化以便更快且更准确地进行仿真分析,具体约束关系如表2所示。为了提升模型的仿真解算速度和计算效率,将其余部件与车体整合成为一个整体的刚体系统模型。通过分析小型履带式动力底盘各组件间的约束及运动关系,构建其模型的拓扑结构,如图2所示。
2.2 动力学仿真模型构建
利用Solidworks软件创建小型履带式动力底盘的三维部件模型,并在RecurDyn软件中加载这些车体部分的模型。在RecurDyn/Track(LM)环境下,通过参数化方法对履带、驱动轮、张紧轮及其他轮系组件进行建模和装配,初步建立了小型履带式动力底盘的动力学仿真模型,如图3所示[13]。分析其拓扑结构,设定各部件间的约束及运动关系,合理设置质量特性参数。根据需要进一步调整履带内部衬套力的刚度和阻尼系数、各部件的摩擦因数,并施加预张紧力,完成履带式动力底盘的多体动力学模型建立。
2.3 仿真参数设置
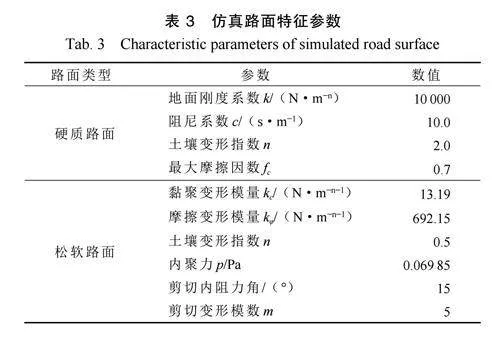
在设计小型履带式动力底盘时,主要考虑了两种作业环境:硬质水泥路面和松软的耕地路面。因此,在RecurDyn中需要设置两种不同的路面环境来模拟底盘的作业性能,设置的仿真路面特征参数如表3所示。在硬质路面上行驶时,路面不会发生形变,因此可以使用接触碰撞摩擦模型来模拟作业情况。相反,在松软路面上行驶时,路面会发生形变,因此需要使用贝克的压力−沉陷关系模型进行仿真模拟[14]。
在RecurDyn软件中,为小型履带式动力底盘添加驱动速度实质上是为驱动轮添加了角速度。因此,在给小型履带式动力底盘动力底盘添加速度时,需要使用STEP函数进行设值[15]。行驶速度范围0.2~1.2m/s,在动力学仿真软件中速度取0.4、0.8和1.2m/s,按照RecurDyn软件的要求将速度转换成STEP函数的形式。STEP函数是一个三次多项式逼近阶跃函数,其常用表达形式为STEP(x,x0,h0,x1,h1),因此设置的速度在函数中表达为STEP(Time,0,0,3,1.44)、STEP(Time,0,0,3,2.88)、STEP(Time,0,0,3,4.32)。STEP函数的物理意义用数学公式表示为式中 x——时间自变量。
3 仿真结果与分析
3.1 直线行驶侧向偏移量
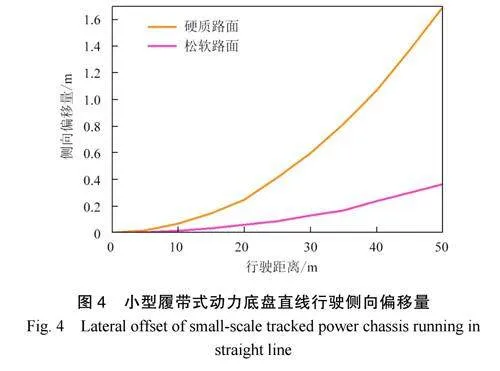
小型履带式动力底盘分别在硬质、松软两种路面环境下以0.8m/s的速度直线行驶,将小型履带式动力底盘在仿真环境中行驶的数据导出,行驶偏移轨迹曲线如图4所示。
分析行驶轨迹线可得,当小型履带式动力底盘在硬质和松软两种路面环境下直线行驶50m时,车体的侧向偏移量分别为1.692和0.364m,跑偏率分别为3.38%和0.72%。根据GB/T15370.4—2012《农业拖拉机通用技术条件第4部分:履带拖拉机》的指标要求,拖拉机的跑偏率≤6%。因此,小型履带式动力底盘在直线行驶时的侧向稳定性符合要求。
3.2 纵向坡地行驶性能仿真分析
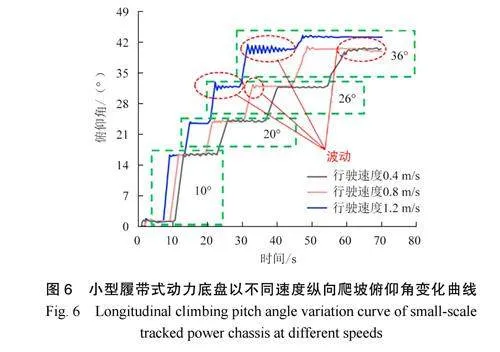
为了验证小型履带式动力底盘的爬坡能力,在正常耕地路面环境下设置10°、20°、26°和36°的爬坡角度,分别以0.4、0.8和1.2m/s的速度行驶进行仿真,在Recurdyn中仿真界面如图5所示。
将小型履带式动力底盘行驶的数据导出,可以得到其在爬坡行驶过程中俯仰角的变化,如图6所示。仿真结果分析表明,小型履带式动力底盘在坡度10°的路面环境行驶时,俯仰角大小基本没有变化,能够平稳通过;在坡度20°的路面情况下,能够平稳通过,俯仰角保持稳定,爬坡性能良好;在坡度26°的路面上以0.8和1.2m/s的速度行驶时,俯仰角会发生突变;在36°的斜坡上行驶时,俯仰角的变化更为显著,这导致小型履带式动力底盘的稳定性相对较差,甚至会产生倾翻滑移的现象。
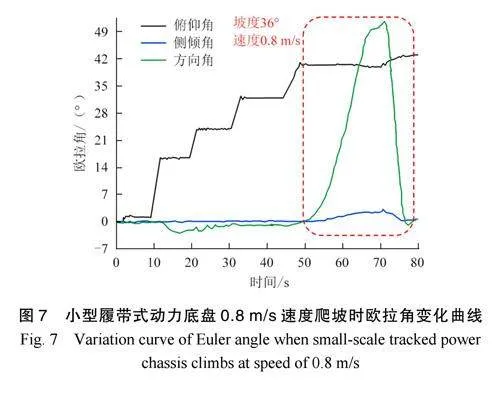
小型履带式动力底盘以0.8m/s速度行驶时,欧拉角(俯仰角、方向角、侧倾角)的变化曲线如图7所示。小型履带式动力底盘在10°、20°和26°的斜坡上行驶时,俯仰角和侧倾角变化较小,爬坡作业时可以稳定行驶;在坡度10°斜坡行驶时,方向角呈先增大后减小的变化趋势,随后恢复稳定;在坡度36°的坡度路面行驶时,方向角会产生突变,侧倾角同时也逐渐增大,这表明虽然小型履带式动力底盘可以通过36°的斜坡,但是不能平稳地通过,因此可以得到设计的小型履带式动力底盘的最大爬坡角度36°。
3.3 越障通过性仿真分析
验证越障通过性对于丘陵山地小型履带式动力底盘来说非常重要,主要因为这关系到其能否有效、安全地在复杂地形中通过。在丘陵山地果园作业过程中,攀越垂直障碍物是常见的作业环境。良好的越障通过性意味着小型履带式动力底盘有良好的通过性和对地面环境的适应性,使得其能够在复杂的地形环境中维持稳定和可控性。在RecurDyn中建立果园硬质路面环境,设置不同高度的垂直障碍物,仿真模拟履带式动力底盘攀越障碍物的过程,其仿真界面如图8所示,仿真结果如表4所示。
仿真结果分析表明,小型履带式动力底盘在硬质路面行驶时可以平稳地通过140mm高度的垂直障碍物;当垂直障碍物高度160mm时,可以晃动通过;当垂直障碍物高度180mm时,无法通过。这说明小型履带式动力底盘在硬质路面行驶时的极限越障高度为160~180mm。为了准确得到小型履带式动力底盘的越障能力,不断降低障碍物的高度,最终可以得到其可以晃动通过170mm高度的垂直障碍物,最大仰角58.6°,越障通过时间4.76s。同理可以得到小型履带式动力底盘在松软路面行驶时的极限越障高度185mm。
3.4 跨越壕沟通过性仿真分析
在RecurDyn中建立果园硬质路面环境,设置不同宽度壕沟,仿真模拟小型履带式动力底盘跨越壕沟的过程,其仿真界面如图9所示,仿真结果如表5所示。
仿真结果分析表明,硬质路面上,小型履带式动力底盘可以稳定通过250mm宽度的壕沟;当壕沟宽度增至300mm时,可晃动通过;而350mm宽度的壕沟则无法通过。这表明,在硬质路面行驶时,小型履带式动力底盘跨越壕沟的极限范围为250~350mm。为了准确评估其越障能力,将壕沟宽度不断缩小,最终确定在310mm宽度的壕沟内,小型履带式动力底盘可以晃动通过,最大仰角36.98°、最大俯角12.6°、越障通过时间3.68s。
同理,可以在RecurDyn中进行仿真分析小型履带式动力底盘在松软路面上跨越壕沟的过程。最终结果表明,小型履带式动力底盘能够跨越的极限宽度296mm、最大俯角15.6°、最大仰角41.57°。通过与在硬质路面上跨越壕沟的能力进行对比,发现在松软路面上的跨越能力略逊于硬质路面。这可能是由于松软路面会增加摩擦阻力,使得小型履带式动力底盘在跨越壕沟时更容易陷入或滑动,而硬质路面则能提供更好的支撑和稳定性。
4 结束语
本研究对小型履带式动力底盘的总体结构进行了设计,确定了各部件的参数和行走系统的选型。基于RecurDyn软件建立了小型履带式动力底盘与作业路面的多体动力学仿真模型,对小型履带式动力底盘在直线行驶和爬坡过程进行仿真分析。结果表明,硬质和松软路面下小型履带式动力底盘的直线行驶跑偏率分别为3.38%和0.72%,都可以在30°的坡度路面稳定通过,爬坡稳定性较好。
为了得到小型履带式动力底盘的越障能力,对其分别在硬质和松软两种路面环境下的越障过程(翻越垂直障碍物和跨越壕沟)进行仿真分析。结果表明,两种路况下小型履带式动力底盘的极限翻越垂直障碍物的高度分别为170和185mm,可跨越壕沟的极限宽度分别为310和296mm,通过仿真分析结果可知,小型履带式动力底盘的越障能力能够符合丘陵山地果园作业要求,本研究可以为深入研究小型履带式动力底盘的行驶特性提供参考。