基于无人机图像的正射影像图制作研究
2024-11-01 00:00:00周贵强
科技资讯 2024年17期

摘要:航空摄影测量是当代快速获取地理信息的重要技术手段,传统的测量手段通过全站仪、水准仪、经纬仪以及全球定位系统(GlobalPositioningSystem,GPS)等测量仪器获取地理数据信息,但这些方式具有生产周期长、工作步骤繁琐、受环境因素影响大、人员需求多、成本费用高等缺点。以贵阳市阿哈湖水库区域测量为工程背景,探讨了基于无人机航空摄影测量的正射影像图制作,精度验证表明,最大点位中误差为0.563,平均点位中误差为0.420,符合平地平面位置中误差0.6m的精度要求。
关键词:无人机遥感数字地形模型数字正射影像图
中图分类号:P237;TP751
ResearchontheProductionofOrthophotoMapsBasedonUVAImages
ZHOUGuiqiang
GuiyangSurveyingandMappingInstitute,GuiyangCity,GuizhouProvince,550081China
Abstract:AerialPhotogrammetryisanimportanttechnologicalmeansforquicklyobtaininggeographicinformationincontemporarytimes.Traditionalmeasurementmethodsobtaingeographicdatainformationthroughmeasuringinstrumentssuchastotalstations,levels,theodolites,andGlobalPositioningSystem(GPS).However,thesemethodshavethedisadvantages&nbsiajDhM8C9zbS3BYQcTegFQ==p;oflongproductioncycles,cumbersomeworksteps,highenvironmentalfactors,highpersonneldemand,andhighcost.TakingthemeasurementoftheAhaLakeReservoirareainGuiyangCityastheengineeringbackground,thispaperexplorestheproductionoforthophotomapsbasedonunmannedaerialvehicle(UVA)aerialphotogrammetry.Theaccuracyverificationshowsthatthemaximumpointmeansquareerroris0.563,andtheaveragepointmeansquareerroris0.420,whichmeetstheprecisionrequirementof0.6minflatgroundposition.
KeyWords:UAV;Remotesensing;Digitalterrainmodel;Digitalorthophotomaps
近年来,全球导航卫星系统(GlobalNavigationSatelliteSystem,GNSS)、激光雷达以及无人机等现代测量设备发展迅速,促使地理空间信息数据的采集手段更加多样化、高效,成本也更低[1]。其中,无人机(UnmannedAerialVehicle,UAV)作为高效灵活的新型遥感平台,能够搭载各种传感器对目标地区采集高分辨率的数据,特别是对于车辆和人员无法直接到达的危险区域,可大大减少外业数据采集工作的成本,提高作业效率和作业的安全性[2]。
数字正射影像图(DigitalOrthophotoMap,DOM),是将航摄相片或遥感影像(单/彩色)扫描处理后,经逐像元辐射改正、微分校正、镶嵌,再按一定的图幅裁切、图廓整饰,生成以栅格数据形式存储的影像数据。DOM具有地形图的几何精度和影像特征,相较于传统的符号化地形图,有着信息丰富、精度高、空间分辨率高、图案特征真实直观、现实性强等优点,从中可提取出自然信息和人文信息,并以此为基础派生出新的产品和信息。DOM作为摄影测量的重要产品,被广泛运用到各领域中。随着技术发展,DOM在越来越多的领域都有很高的应用价值,在城市建设规划、灾害监测、生态变化监测、土地利用、海岸线保护、地理国情普查等领域中都发挥了重要作用[3]。
1测量区域与数据获取
1.1测量区域
本次测量范围涉及贵阳市阿哈湖水库区域,总面积约112km2,位于北纬26.45°~26.58°,东经106.548°~106.68°之间。
1.2已有资料分析与利用
(1)项目区内国家C级控制网控制点4个(H093、H066、H086、H079),可以作为像控点起算联测点。
(2)收集的已有全国30m格网通用数字高程模型(DigitalElevationModel,DEM),作测区航线规划。
(3)近年来的2m分辨率卫星影像,作为航飞调控与像控布点的参考资料。
1.3无人机数据获取
测量使用纵横大鹏CW-30无人机,该机型为双尾撑布局、后推式油动主要参数固定翼无人机,具有垂直起降、全自主飞行、航时长、速度快、载荷大、结构稳定、可靠性高等特点[4]。
根据本次航摄需要,为满足1∶1000DOM制作精度,相机采用飞思相机IXU_RS1000,飞机飞行相对高度为580m,绝对航高为1740m,地面分辨率为5~7cm,航向重叠70%~81%,旁向重叠45%~64%。
1.4地面控制点(GroundControl Point,GCP)布局
此次航拍区域大,地形地势起伏明显,综合考虑各种软硬件条件因素,采用合并区域进行空三,据此在整个测区内合理进行像控布点与量测,获取最终所需的坐标,提交航飞内业剌点。本次像控采集共计169个,分布情况如图1所示。
2数据处理
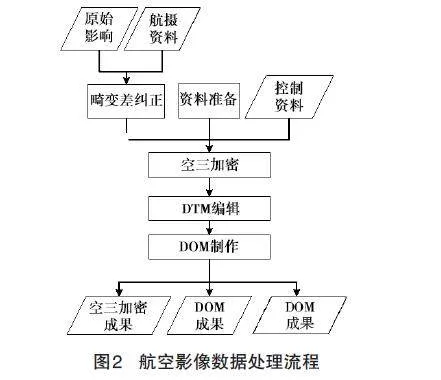
数据流程如图2所示。
2.1资料准备
在对任务范围航拍之后,获得初始格式为JPG影像和经纬度格式的相片高精度位置与姿态测量系统(PositionandOrientationSystem,POS)数据,以及收集的其他相关的资料。在进行空三处理之前,根据地形资料和飞行POS数据对空三加密区域进行统筹安排和预处理,综合考虑各种影响因素,将各架次数据进行整理分类,对3个架次数据进行合并。然后据此对各个分测区原始影像进行格式转换,畸变差纠正,金字塔处理。
对其他地形资料、影像资料和像控资料进行整理,坐标转换。根据空三测区的划分,对这些资料统筹安排。
2.2空三加密处理
根据像控资料以及航拍实际情况,对测区进行合理的划分,为了保证后续拼接精度,分区之间必须要有足够的重叠区和像控点位分布。逐一对各个分测区进行内定向、相对定向,建立测区内各个相片之间的连接,在自动匹配过程中,需要人工添加一些相片连接点,以增强相片之间的连接强度。
完成自动匹配,各个分测区的自由网就成功建立了,因而可以根据外业像控资料进行下一步的操作,即像控内业转刺。将刺点过程划分3个步骤:第一,对原始像控相片和刺点片进行对比,对两者不一致或位置模糊的像控进行外业检核并重新拍照和刺点;第二,内业刺点人员相互检查刺点,对刺点位置不一致的测区和像控点位上交技术主管,待技术主管或外业人员确认后,返回内业确认或重刺;第三,设定像控限差,对测区进行区域网平差,对误差超限的像控进行调整和确认,直至误差满足规范限差要求[5]。
内业转刺完各个分测区所有像控点后,分别对各个分测区进行平差,输出空三加密成果,同时统计各分测区定向点中误差以及公共点定向中误差。对于中误差超限的分测区,逐步核查,各环节都检查一遍,逐一分析引起中误差超限的因素,并最终排除影响因素,使所有分测区的中误差都在规范要求之内。
2.3DTM/DEM生成及编辑
空三加密完成后,就可以通过空三加密成果生成数字地形模型(DigitalTerrainModel,DTM)或点云,而DTM或点云是制作DOM必不可少的要素。根据分测区的地形地势情况,选择合适的DTM类型以达到正确反映实际地形的高精度的数字地形模型[6]。
根据测区的地貌实际情况,逐一对各个测区生成的DTM进行编辑,并把DTM编辑成果输出,即获得测区范围的DEM成果,最终使得DOM正确反映当地实际情况。
2.4生成数字正射影像DOM
导入空三成果恢复立体模型,利用系统的自动匹配功能,生成高精度的数字表面模型(DigitalSurfaceModel,DSM),并设置参数进行保留山体、去除房屋、提取水域等,同时导入采集的特征点、线文件,对DSM进行修正得到反映地面特征的DTM数据。
对DTM进行编辑,输出DEM成果,然后利用DEM成果对原始影像进行正射纠正,获得单片正射纠正影像,通过镶嵌软件自动生成镶嵌线,并叠合影像对镶嵌线进行必要的编辑,使得其不切割人工建筑物或桥梁,然后对整个测区的模型正射影像进行无缝拼接,对测区DOM进行调色处理,之后按照项目技术要求进行1∶1000分幅裁切、图廓整饰,形成标准分幅的DOM数据成果。
3精度评价
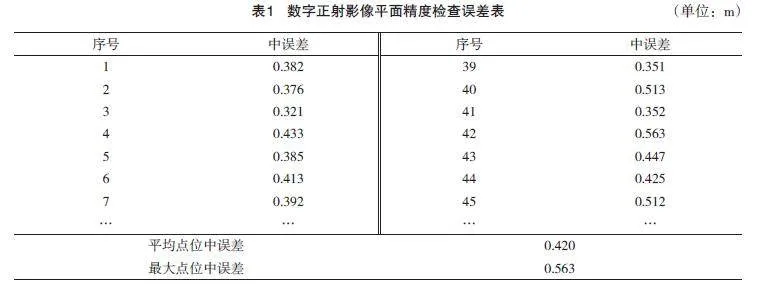
在测区范围的均匀选取一定数量的、不同地形地貌条件下的明显地物点,分别按外业控制点精度要求测量其实地坐标和DOM图解坐标,获取中误差以对DOM影像质量进行评价,如表1所示,最大点位中误差为0.563,平均点位中误差为0.420,符合《基础地理信息数字成果1∶5001∶10001∶2000数字正射影像图》(CHT9008.3—2010)平地平面位置中误差0.6m的精度要求。
4结语
以贵阳市阿哈湖水库区域测量为工程背景,探讨了基于无人机航空摄影测量的正射影像图制作,精度验证表明,最大点位中误差为0.563,平均点位中误差为0.420,《基础地理信息数字成果1∶5001∶10001∶2000数字正射影像图》(CHT9008.3—2010)平地平面位置中误差0.6m的精度要求。
参考文献
[1] 李红林.ADS100影像数据制作DOM技术探讨[J].经纬天地,2023(2):80-83.
[2] 陈颖.基于无人机倾斜摄影的TDOM生产制作研究[J].测绘与空间地理信息,2022,45(8):242-244.
[3] 王瑾.低空免像控无人机测制大比例尺DOM应用中关键技术研究[D].西安:长安大学,2021.
[4] 贺海明,杨溪浩,林用智,等.一种DSM提取及TDOM生产的新方法[J].西华师范大学学报(自然科学版),2022,43(2):225-231.
[5] 吕海扬.基于车载LiDAR与无人机DOM构建智慧园林数据库方法研究[D].连云港:江苏海洋大学,2022.
[6] 王卫.垂直起降固定翼无人机航空摄影在TDOM制作中的应用[J].江西测绘,2020(4):17-20.