基于车载通信的卡车控制策略研究
2024-10-28 00:00孙豪汪亚芳姜科楠
专用汽车 2024年9期
摘要:卡车运输是现代物流运输的主力军,传统卡车控制策略主要依赖于司机经验,存在效率低下、安全风险高等问题。随着车载通信和智能网联技术的发展,基于车载通信的卡车协同控制和云端辅助决策控制成为提高卡车运输效率和安全性的新路径。据此,首先概述了车载通信技术,分析了当前卡车控制策略存在的问题,然后提出了基于车载通信的卡车控制策略。研究结论可显著提高道路运输效率、降低卡车能耗与事故风险,提升卡车控制稳定性。
关键词:车载通信;卡车控制策略;优化方向
中图分类号:U491 收稿日期:2024-06-15
DOI:10.19999/j.cnki.1004-0226.2024.09.011
1 前言
在现代物流运输体系中,卡车运输作为大宗货物运输的主力军,其运输效率和安全性对于提高整个供应链的竞争力至关重要,但传统的卡车运输控制策略主要依赖于驾驶员的个人经验,存在诸多不足,如车队协同性差、能耗较高、交通事故风险较大等问题[1]。
随着车载通信和智能网联技术的飞速发展,通过在卡车上集成车载通信系统、车载计算平台等设备,可以实现车辆与基础设施、车辆与车辆之间的实时通信与信息交互,这为卡车运输控制系统的智能化升级提供了新的契机。通过车载通信,不同卡车可以共享行驶状态信息,从而协调纵向车距和横向编队,实现协同高效行驶[2]。同时,车载云计算系统可以将车载数据与道路基础设施、交通信息等进行融合,支持基于大数据分析的智能路径规划和调度决策,为卡车车队提供辅助控制支持。相比传统的单车控制策略,基于车载通信的协同控制和云端辅助决策控制,可以大幅提高卡车的行驶效率和安全性,减少能耗和事故风险。
2 车载通信技术概述
车载通信技术是现代汽车与信息通讯技术融合的产物,主要分为车对车(V2V)通信和车对基础设施(V2I)通信两大类,它们共同构成了更广泛的智能交通系统(ITS)的核心部分。
车对车(V2V)通信技术使得车辆能够相互交换信息,如速度、位置、行驶方向等,从而在没有人工干预的情况下预警即将发生的危险情况,比如紧急刹车、交叉路口的碰撞风险等。这种技术通过专用短程通信或者逐步兴起的蜂窝车联网技术实现,有效提升了道路安全,减少了交通事故的发生。
车对基础设施通信则是指车辆与道路交通基础设施之间的信息交换,如交通信号灯、路侧传感器等,这种通信帮助车辆获取交通灯状态、交通流量、道路状况等关键信息,促进了交通管理的智能化和自动化。V2I通信可以优化交通流,减少拥堵,提高能源效率。整体来看,车载通信技术不仅增强了车辆的自主性和道路的安全性,也为实现未来全自动驾驶汽车的广泛应用提供了技术支持和实践基础,同时对于提升城市交通管理水平、改善驾驶体验及推动环境保护方面具有重要意义。
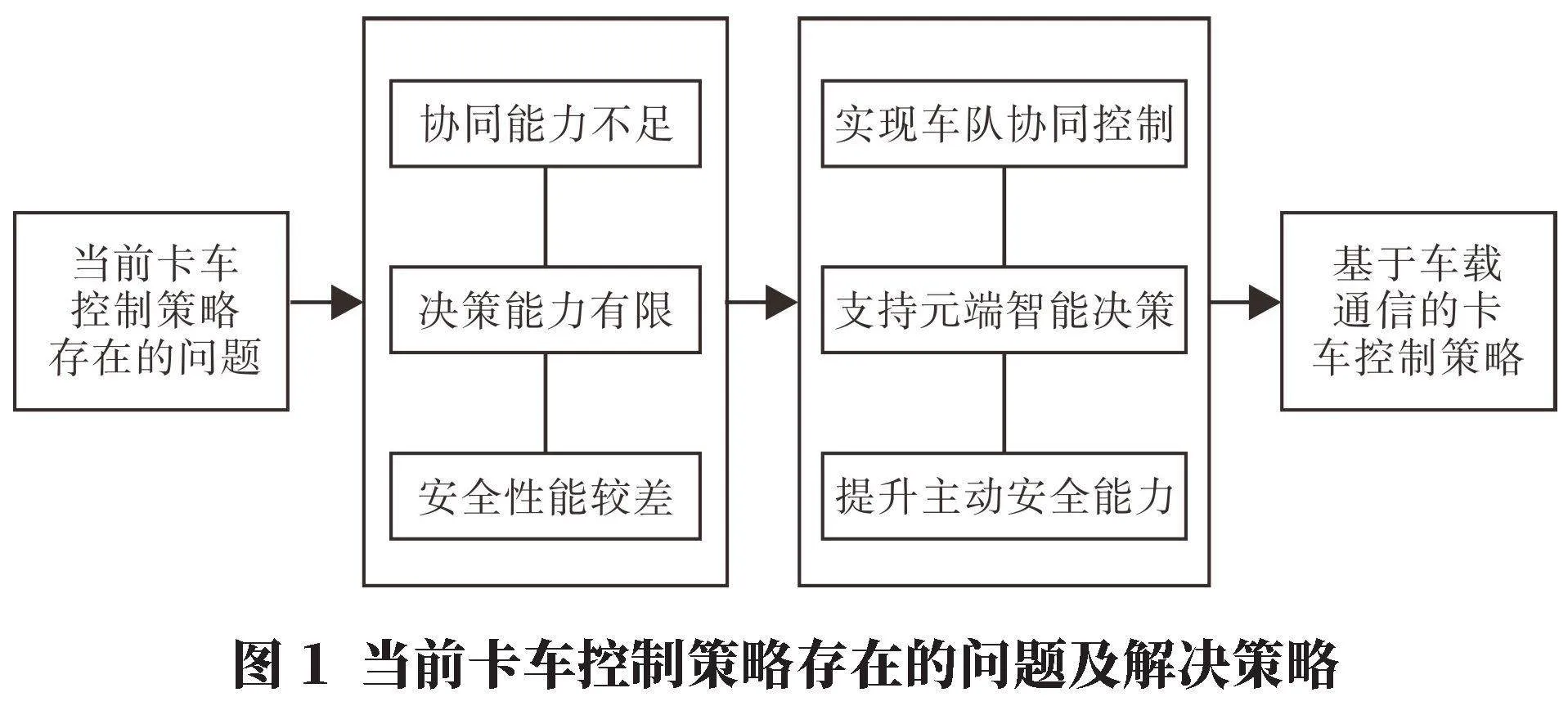
3 当前卡车控制策略存在的问题
随着我国物流运输业的飞速发展,大型卡车车队规模不断扩大,对卡车节能减排和运营效率的要求日益提高[3]。然而,目前卡车的控制策略普遍存在一些不足,难以完全满足复杂多变的运输环境和应用场景具体如图1所示。因此,研究人员亟须创新突破传统卡车控制策略,研发更加智能化、网联化、个性化的全新控制方法,以满足节能减排、提高效率、降低成本的需求,助力我国物流运输业的绿色可持续发展。
3.1 协同能力不足
当前卡车控制策略存在的协同能力不足,如车队协同控制的技术存在局限性,虽然车队行驶作为一种提高燃效和安全性的控制策略已被广泛研究,但实际应用中仍面临多项挑战。现有的车队控制策略主要依赖于高度同步和精确的通信机制,要求每辆卡车之间的通信无延迟且可靠。然而,在复杂的交通环境和不同厂商生产的车辆之间,实现这种高度同步的通信很难达到理想状态。此外,现有控制策略往往假定所有卡车均配备有相同的技术设备和软件协议,这在现实中难以实现,因为不同卡车可能使用不同的通信技术和控制系统,这就增加了整个车队协同控制的复杂度和不确定性。
车辆与交通基础设施之间信息交互的不充分也是当前卡车控制策略的一个关键弱点。理想的智能交通系统应能够实现车辆与交通基础设施之间的高效信息交换,以优化交通流和提高道路使用效率。然而,当前的技术实现中,这种信息交换往往受限于传输技术的成熟度、基础设施的普及程度以及数据共享的政策和标准。许多地区的交通基础设施尚未完全智能化,或者与车辆的通信标准不一致,使得卡车无法实时接收到关键的交通信息,从而无法做出最优的驾驶决策。
3.2 决策能力有限
当前卡车控制策略存在的决策能力有限,决策系统对复杂环境的适应性不足,这主要体现在卡车控制系统通常依赖于预设的算法和参数来处理行驶中遇到的各种情况。然而,实际道路环境极其复杂多变,包括多样的天气条件、不同类型的道路状况以及不可预测的人为因素等[4]。例如,降雨或雪天气会显著影响路面条件和能见度,而传统的卡车控制系统可能无法准确识别这些变化并作出适应性调整。当前的技术还不能完全满足这些需求,导致卡车在处理复杂交通环境时的适应性和灵活性不足,这不仅可能增加行驶风险,也限制了卡车运行的效率和安全性。
决策过程中信息处理和预测能力的局限也是一个重要问题。现代卡车控制系统虽然已经集成了多种传感器和数据处理单元,但在信息整合、处理速度和预测准确性方面仍存在不足。例如,可以通过雷达、摄像头等传感器收集大量环境数据,但数据的实时处理和分析能力有限,可能无法即时识别并响应突发事件。同时,预测未来环境变化和其他车辆行为的能力也是当前技术的一个短板。这包括对交通流变化的预测、对前车行为的判断等,这些都需要高度准确的数据分析和模型支持。目前,这些技术仍未达到完全可靠的水平,导致卡车在实际行驶中可能无法做出最优或最安全的决策,限制了其在复杂环境中的运行效率和安全性。
3.3 安全性能较差
当前卡车控制策略在确保行车安全性方面存在一些明显的缺陷,传感器依赖性和感知系统的局限性是影响卡车控制策略安全性能的一个重要因素,这些传感器的性能受到多种因素的影响,传感器本身也存在技术限制等。例如,在雾天或雨天,摄像头的视线可能会受阻,雷达波可能会因水滴干扰而反射信号减弱,这些因素都会导致传感器信息的不准确或丢失,从而降低卡车控制系统的反应效率和准确性。
自动控制系统在处理复杂交通状况下的应对能力不足也是卡车控制策略安全性能较差的一个关键问题。尽管自动控制系统能够在某些标准化和预测性较强的交通情况下表现良好,但在复杂或不可预测的交通环境中,这些系统的决策和执行能力仍然有限。例如,在交通拥堵、交通事故现场或复杂的交叉口,需要进行快速和复杂决策的情况下,自动控制系统可能无法及时识别所有潜在的危险或不足以做出最合适的驾驶决策。
4 基于车载通信的卡车控制策略
4.1 实现车队协同控制
基于车载通信的卡车控制策略能够实现高效的车队协同控制,主要依赖于两个核心技术:a.车对车(V2V)通信技术的应用;b.集中式管理与分布式执行的控制策略。
车对车(V2V)通信技术是车队协同控制的基石。通过V2V通信,车队中的各辆卡车可以实时分享各自的位置、速度、加速度等关键信息,以及更复杂的数据如意图、行驶状态和周边环境感知信息。这种信息的共享使得每辆车不仅仅依赖于自身的传感器数据,而是能够获得车队内其他车辆的感知数据,极大地扩展了单个车辆的感知范围和精度。例如,当车队行驶在高速公路上,前方车辆通过V2V通信提前传递交通拥堵或事故的信息给后方车辆,后方车辆可以提前做出调整,如减速或改变行驶路线,从而整体优化车队的行驶效率和安全性。V2V通信还支持更紧密的车队编队驾驶,如车队内车辆可以实现更小的车间距离,通过精确协调加速和制动来维持这种紧密的编队,这不仅减少了空气阻力,提高燃油效率,也增加了公路的通行能力。
集中式管理与分布式执行的控制策略也是实现车队协同控制的关键。在这种策略中,虽然每辆车保持自主控制的能力,但车队的整体行为受到一个集中式管理系统的调度和协调。这个系统可以是车队中的领头车,或者是远程控制中心,负责处理车队的整体策略决策,如路线规划、速度设定、车队编队结构调整等。通过集中式策略制定,车队可以更有效地应对复杂的交通环境和突发事件,如在遇到紧急情况时,集中系统可以快速做出决策并通过V2V通信传达给每一辆车,确保所有车辆同步执行紧急避险措施。
4.2 支持云端智能决策
基于车载通信的卡车控制策略中,云端智能决策的支持是提升车辆自动化和网络化管理的关键环节,云计算与大数据分析的集成应用为卡车控制策略提供了强大的数据处理和决策支持能力。在这一体系中,所有通过车载传感器、V2V以及V2I通信收集的数据,可以被实时上传到云端服务器。云端服务器具备高效处理大规模数据的能力,能够对收集到的庞大数据进行存储、处理和分析。例如,云端可以收集来自整个车队的位置信息、速度、路线状态、交通状况等数据,通过高级算法模型分析这些数据,预测交通流量变化,优化路线规划,甚至可以根据实时交通信息和天气状况动态调整车队的行进速度和路线。云端还可以利用历史数据分析来优化车辆的能耗管理和维护计划,通过对车辆性能长期跟踪的分析,预测潜在的维修需求,从而减少车辆的故障率和维护成本。
云端到车端的高效通信系统是实现云端智能决策不可或缺的技术。这一系统确保了云端处理的决策信息可以快速、准确地传输到各个车辆的控制系统中。在这个过程中,高带宽、低延迟的通信技术起到了至关重要的作用。例如,5G通信技术的应用,以其高速的数据传输率和极低的延迟特性,使得从云端到车端的数据传输几乎实时进行,确保车辆能够即时接收到从云端发送的最新路线调整指令或安全警告。这种快速的响应能力对于保障行驶中的车辆安全至关重要,尤其是在紧急避险或突发事件响应中。这种通信系统还支持车辆与云端之间的双向通信,不仅车辆可以从云端接收指令,车辆的状态信息也可以实时反馈给云端,使云端能够根据车辆的实时数据调整其决策建议,实现更为精细和个性化的车辆管理。
4.3 提升主动安全能力
基于车载通信的卡车控制策略在提升车辆的主动安全能力方面发挥着至关重要的作用,基于智能算法的决策支持系统是提高车辆主动安全的关键因素。这一系统综合分析通过V2V和V2I收集到的大量数据,并结合车辆自身的传感器信息,使用机器学习、人工智能等先进算法,实时评估道路情况和交通环境的安全风险。智能算法可以在分析这些数据时,预测并识别潜在的碰撞和事故风险,进而自动执行安全措施,如自动制动、车道保持、安全距离调整等。例如,智能算法可以计算车辆之间的最安全距离,并实时调整车速以维持此安全距离,或者在系统检测到侧方车道有快速接近的车辆时,自动取消变道操作,防止可能的侧面碰撞。
基于车载通信的卡车控制策略不仅能够提供更全面的环境感知,而且能够通过智能化的实时决策,有效预防事故的发生,大幅提升车辆的主动安全性。这种高度集成的通信与控制系统对于未来高速公路和城市道路的车辆安全管理具有革命性的意义,为实现更安全的道路交通环境提供了可靠的技术支持。
5 结语
随着经济社会的快速发展,物流运输对卡车车队的效率和安全性提出了更高要求。基于车载通信的智能协同控制和云端辅助决策,正是解决当前卡车控制问题、实现智能高效运输的有力手段。本文系统研究了基于车载通信的卡车控制新策略。研究表明,基于车载通信的卡车控制策略可有效提升道路通行效率,降低运营成本和能耗,全面增强运输安全性,在智慧物流和智能网联汽车领域具有广阔的应用前景。未来,相关技术的进一步完善和产业化推广,必将为实现卡车运输的智能化转型注入强大动力。同时,随着5G、人工智能等新兴技术的发展,车载通信和智能控制技术还将不断演进,支持更加复杂的控制策略和应用场景。如何充分挖掘新技术潜力、融合多学科知识,设计更加智能化、自动化的卡车控制系统,将是本领域值得深入研究的重要方向。
参考文献:
[1]刘亭亭.通信受限下自主无人系统的任务协同和通信联合研究[D].北京:北京邮电大学,2024.
[2]梁国庆,张晨,张娟.浅谈参数化设计在重型卡车外观造型中的应用[J].重型汽车,2023(5):34-35.
[3]冉德钦,陈帅,刘文君,等.新能源重型卡车应用研究[J].公路与汽运,2023(5):10-12.
[4]朱青松,李军伟,曹学自,等.基于高精度电子地图的卡车预见性巡航策略[J].农业装备与车辆工程,2021,59(8):20-25.