基于CarSim-Simulink联合仿真的牵引车转向控制策略研究
2024-10-24 00:00高俊哲徐凯宏程仁轩张锡武郭福明韩涛国王雯雅
森林工程 2024年5期












摘 要:牵引车在承担林业运载作业时,由于林间路况复杂,因此多以低速运行,有较高的转向需求,且往往带有负载单位,所以更关注其行驶稳定性与转向灵敏性。利用CarSim软件构建牵引车物理模型与负载模型,基于Simulink软件进行牵引车控制策略的设计,结合二自由度动力学模型建立牵引车二自由度模型,以牵引车横摆角速度与质心侧偏角参数结合模糊控制理论对牵引车转向过程进行制动力矩反馈控制,另外根据牵引车四轮转向模式,引入前后轮转角比例控制策略。在CarSim-Simulink联合仿真平台下,结合林业作业复杂路况进行不同控制策略下牵引车低速行驶与转向试验。结果表明,采取的控制策略有效减少复杂路况下牵引车的转向半径,提升转向速度,并将质心侧偏角限制在较小范围,牵引车稳定性较高,且横摆角速度稳态值更接近理想状态,转向更加灵敏。
关键词:林业运载; 模糊控制; 横摆控制; 质心侧偏; 联合仿真; 转向稳定
中图分类号:S776.36+1;TP319;U489 文献标识码:A DOI:10.7525/j.issn.1006-8023.2024.05.011
Research on Steering Control Strategy of Tractor Based on CarSim-Simulink Co-simulation
Abstract: When the tractor is undertaking the forestry carrying operation, due to the complex road conditions in the forest, it mostly runs at a low speed, has a high steering demand, and often has a load unit, so it pays more attention to its driving stability and steering sensitivity. In this paper, CarSim software is used to build the physical model and load unit model of the tractor, the control strategy of the tractor is designed based on Simulink software combined with the two-degree-of-freedom dynamic model, and the two-degree-of-freedom model of tractor is established. The braking torque feedback control is carried out by combining the yaw rate and the side deflection angle of centroid with the fuzzy control theory. In addition, the proportional control strategy of front and rear wheel angle is introduced according to the four-wheel steering mode of the tractor. Under the CarSim-Simlulink co-simulation platform, combined with the complex road conditions of forestry operations, the low-speed driving and steering experiments of tractor under different control strategies are carried out. The results show that the control strategy adopted in this paper can effectively reduce the steering radius of the tractor under complex road conditions, increase the steering speed, and limit the side deflection angle of centroid to a small range. The tractor has high stability, the steady state value of yaw rate is closer to the ideal state, and the steering is more sensitive.
Keywords: Forestry transport; fuzzy control; yaw control; side deflection of centroid; co-simulation; steering stability
0 引言
牵引车是一种可以应用于多种场合下进行拖挂、牵引、货物调度工作的设备。在林业作业过程中,牵引车往往承担对于林业设备的运载拖运、林木材料等的运输任务[1]。由于林间的路况相对复杂,因此牵引车在负载运输作业过程中往往以低速状态行驶,转向频率较高,对行驶和转向过程中的灵敏性和稳定性都有一定的要求[2]。目前国内外学者对于牵引车的控制策略的研究相对较少,在林业作业条件下对于牵引车性能的提升还有很大空间。
牵引车四轮可以实现独立控制,而四轮转向技术是一种新兴的车辆控制技术,多用于提升车辆运行稳定性和转向灵敏性。国内外学者从前轮控制出发,先后提出了前后轮转角比例控制、角度直接控制和角度参数反馈控制等多种方式[3-6]。另外,还有学者从车辆运动学角度,创建多自由度车辆模型,对车辆运动进行控制。田然等[7]提出了基于二自由度模型的横摆力矩控制;魏晗[8]设计了线性二次型优化控制等控制策略,这些控制策略均一定程度上提升了车辆运行稳定性和灵活性,但其研究都集中于常规车辆控制,且更多侧重高速情况。
针对牵引车控制策略研究的局限性,本研究重点关注林业作业路况下牵引车的行驶和转向需求,将研究目标设定为负载牵引车,针对一定程度的复杂路况,在低速行驶条件下进行行驶与转向研究。控制策略方面,基于二自由度车辆动力学模型,结合车辆四轮转向原理,在Simulink仿真平台搭建牵引车动力学模型[9-12],并结合模糊控制理论进行制动反馈控制策略的设计,另外增加前后轮转向比例控制策略优化牵引车低速转向时的稳定性与灵敏性,最后将系统模型结合CarSim平台中的牵引车与负载物理模型在贴近林业作业条件的路况进行联合仿真,对比不同控制策略下牵引车在低速转向过程中的行驶稳定性和转向灵敏性。
1 四轮转向和二自由度模型
牵引车由于自身结构相对简单,设计更简洁,更注重其负载能力,因此采用四轮转向驱动的设计,在低速运行条件下,具有更加优越的转向性能和稳定性。传统的汽车转向时,前后轮不同时转动会形成相位差,导致车身转向不平稳,汽车稳定性差,而四轮转向牵引车在转向时前后轮同时产生转角,车身转向平稳,能有效改善车辆低速运行时的转向半径。
常用的车辆动力学模型根据其不同研究需要,有多种自由度模型,其中,二自由度模型将车辆质心位置、轮胎侧偏特性等影响车辆侧向运动的关键参数进行了定量的描述,更利于研究车辆稳定性。推导二自由度模型需要先做出假设:
1)忽略转向系统的影响,直接以前轮转角作为输入。
2)忽略车轮悬架的作用,车身只作平行于地面的运动,绕z轴的位移与绕y轴的俯仰角以及绕x轴的侧倾角均为0。
3)假设汽车前进速度不变。
将整车简化为二轮,并线性化轮胎侧偏特性,忽略纵向驱动或阻力。其中,二自由度分别指的是车辆的横摆和侧向运动,分别可以用横摆角速度和质心侧偏角等表示[13]。
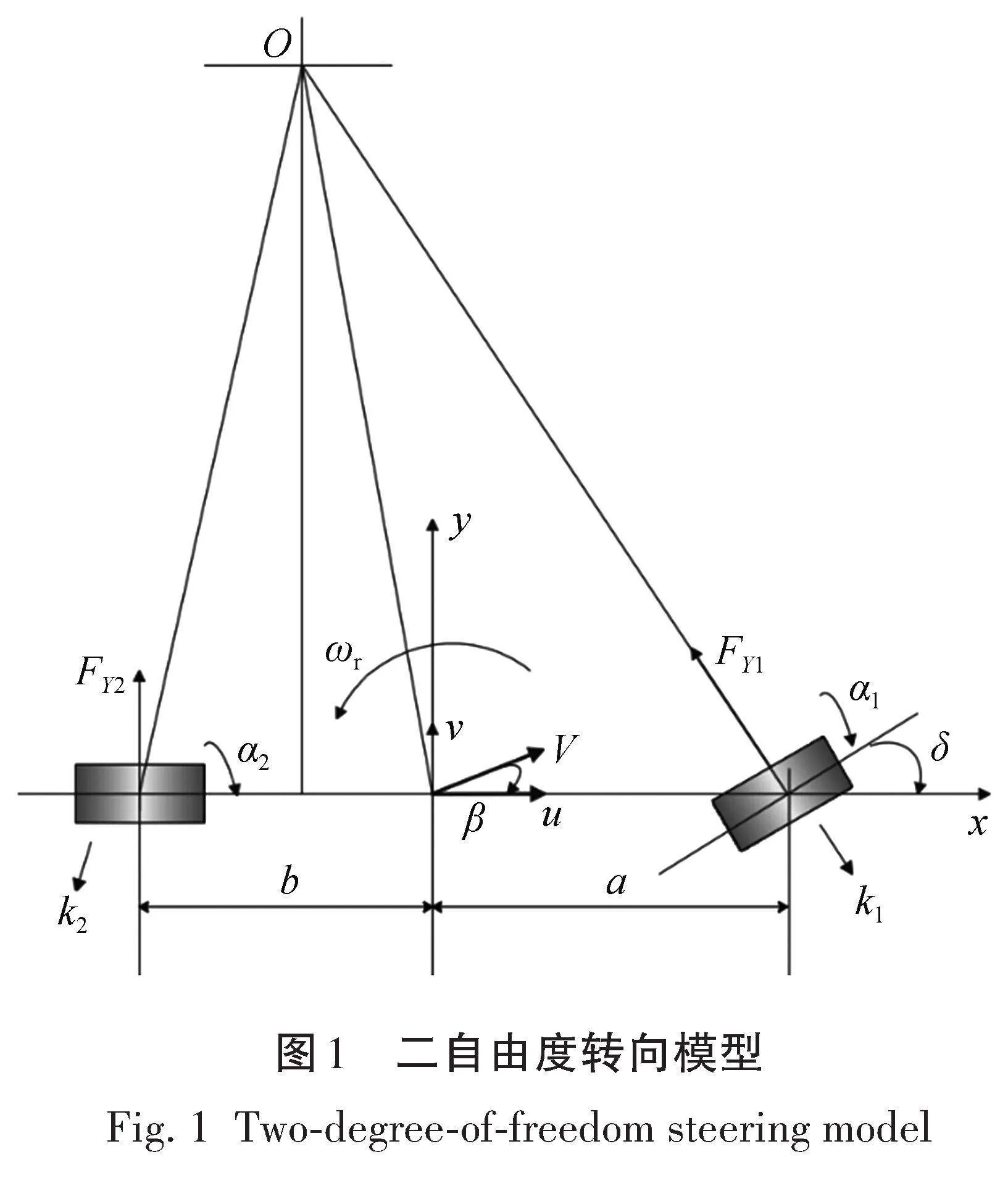
采用二自由度动力学模型作为设计控制策略的基本模型,关注牵引车低速运行过程中横摆角速度与车轮转角的关系,以及质心侧偏角与车辆转角的关系,忽略其他影响因素,可以有效地测试出牵引车低速转向时的行驶稳定性和转向灵敏性。
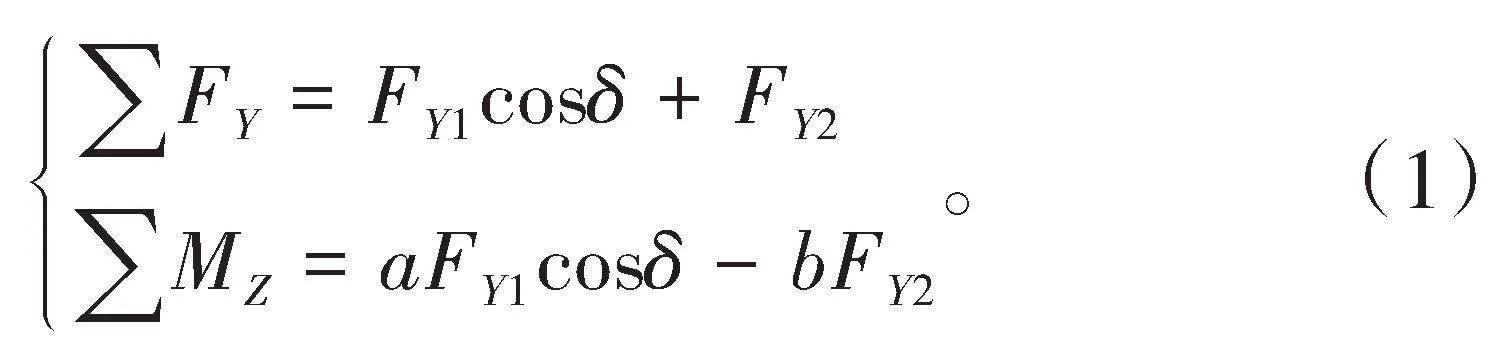
二自由度参考模型如图1所示,图1中:、分别为地面对前后两轮的侧向作用力;、为车辆前后轮的侧偏刚度;、为车辆前后轮的侧偏角;V为车辆质心速度;为车辆质心速度在y轴上的分量,而u为车辆质心速度在x轴上的分量,亦为车辆纵向速度;为车辆的质心侧偏角;为车辆横摆角速度;为车辆前轴到质心的长度;为车辆后轴到质心的距离;为车轮转角。
根据推导,牵引车二自由度模型可以用以下2个微分方程表示
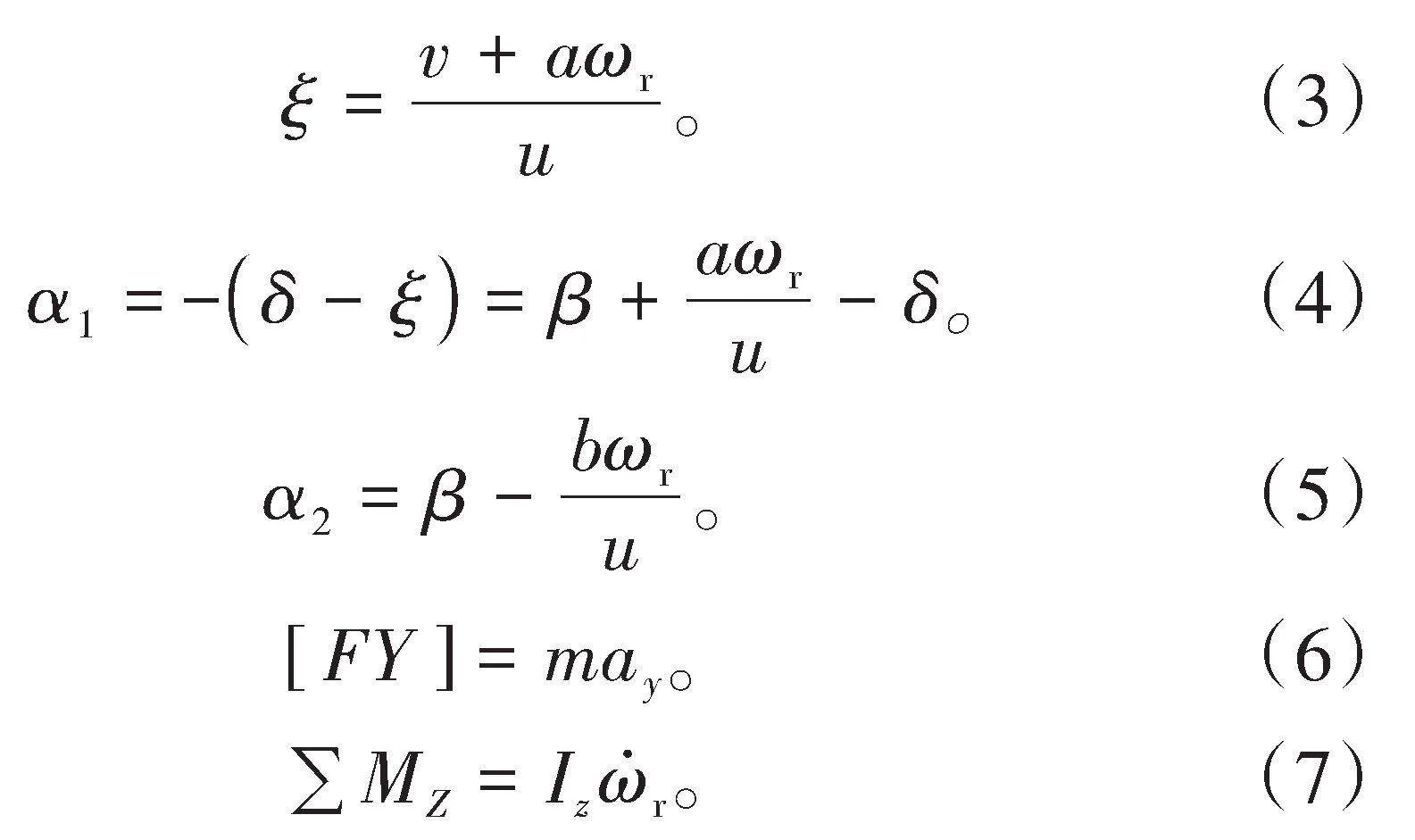
考虑到角度较小,所以取,式中,。
其中
代入整理得到二自由度车辆运动微分方程为
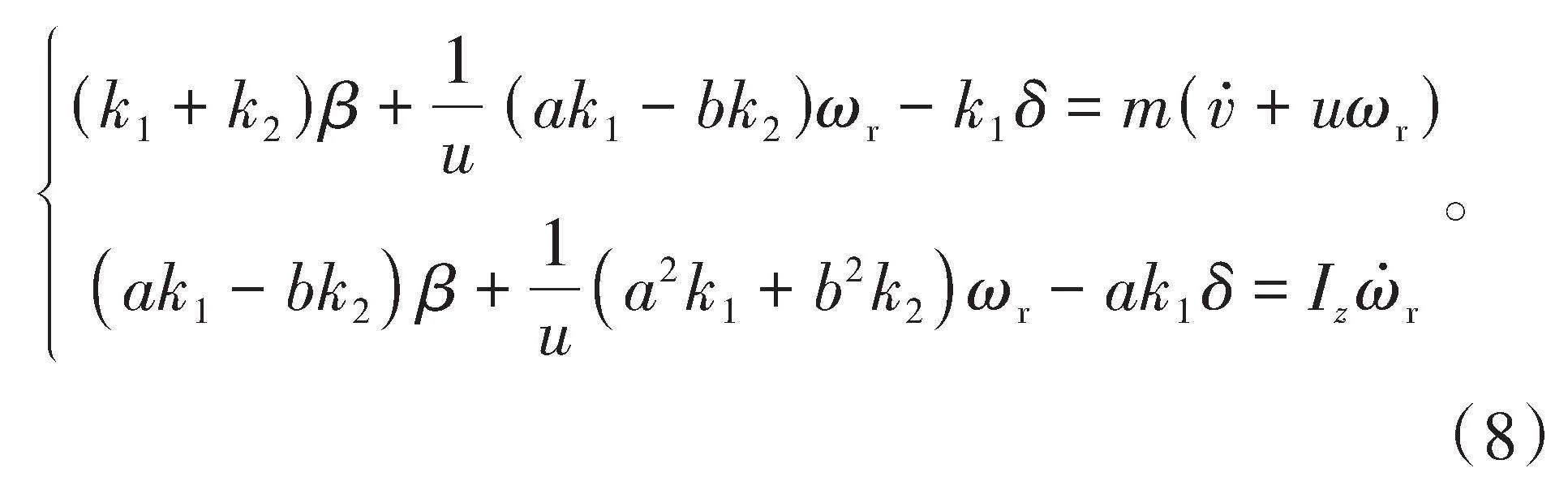
由于牵引车采用四轮转向模式,在前轮转角的基础上补充后轮转角,因此在二自由度模型中区分前轮倾角和后轮倾角,并对公式作如下补充
得到的二自由度牵引车动力学微分方程为
2 牵引车控制策略设计
根据牵引车基本技术指标构建牵引车物理模型,提取仿真试验所需参数,对牵引车进行参数化结构描述。将得到的物理参数引入CarSim仿真软件形成牵引车物理模型;另外,在Simulink软件中进行牵引车二自由度动力学模型的建模,通过联合仿真,由CarSim得到物理模型低速转向过程中的仿真质心侧偏角和仿真横摆角速度;由Simulink得到基于二自由度模型推导下的理想质心侧偏角和理想横摆角速度,2个参数分别作差,根据差值进行模糊控制,对牵引车转向过程中的车轮进行转向制动反馈,另外根据四轮转向基本原理,增加前后车轮转向比例控制,对牵引车进行综合控制。
本研设计的控制策略原理如图2所示。
2.1 制动反馈控制
制动反馈控制模块由2部分构成,首先根据上述的车辆二自由度方程,取、为系统状态变量;取、为系统输入;取、、为系统输出(m为车辆簧载质量,即车辆质量)
创建状态空间矩阵
式中:
构建运行过程中牵引车运动状态处理参数,设定车辆后轮在稳态时转角为0,联立两式消去车辆质心侧偏角,可以得到稳态响应下的车辆横摆角速度为
式中:为车辆运行的实时纵向速度;为车辆运行时前轮的转角。
另外,由于车辆行驶过程中,横摆角速度需要控制在阈值之内,才能保证车辆行驶稳定性,因此横摆角速度还需要满足[15]
式中:u为车轮的道路附着系数,对于不同道路取不同值;g为重力加速度。
所以理想的横摆角速度取值为
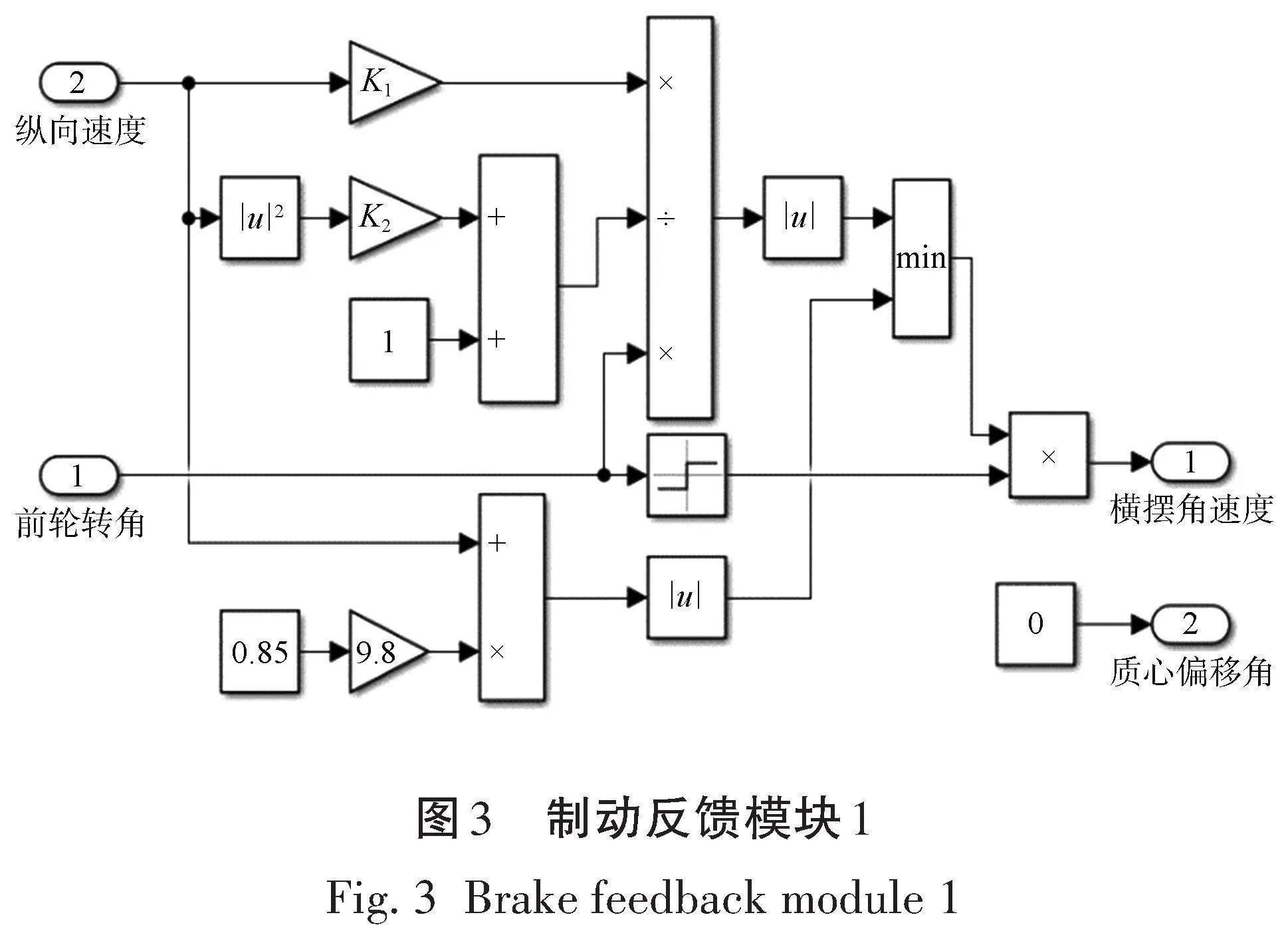
在Simulink仿真平台搭建制动反馈控制模块一如图3所示。其中,增益系数K1为1/(a+b);增益系数K2为m(a/k1-b/k2)/(a+b)。
要保证牵引车行驶过程中的稳定性,且牵引车在转向过程中要尽量减少侧滑,使牵引车行驶过程跟随轨迹,应将理想质心侧偏角设置为0。
2.2 模糊控制
牵引车行驶状态是实时变动的复杂过程,因此建立准确的表达式对其进行定量分析比较困难,而模糊控制不需要对牵引车运行过程进行准确的模型化,而是借助在该方面有经验的专家学者的实践和研究经验对系统制定模糊规则,鲁棒性强。
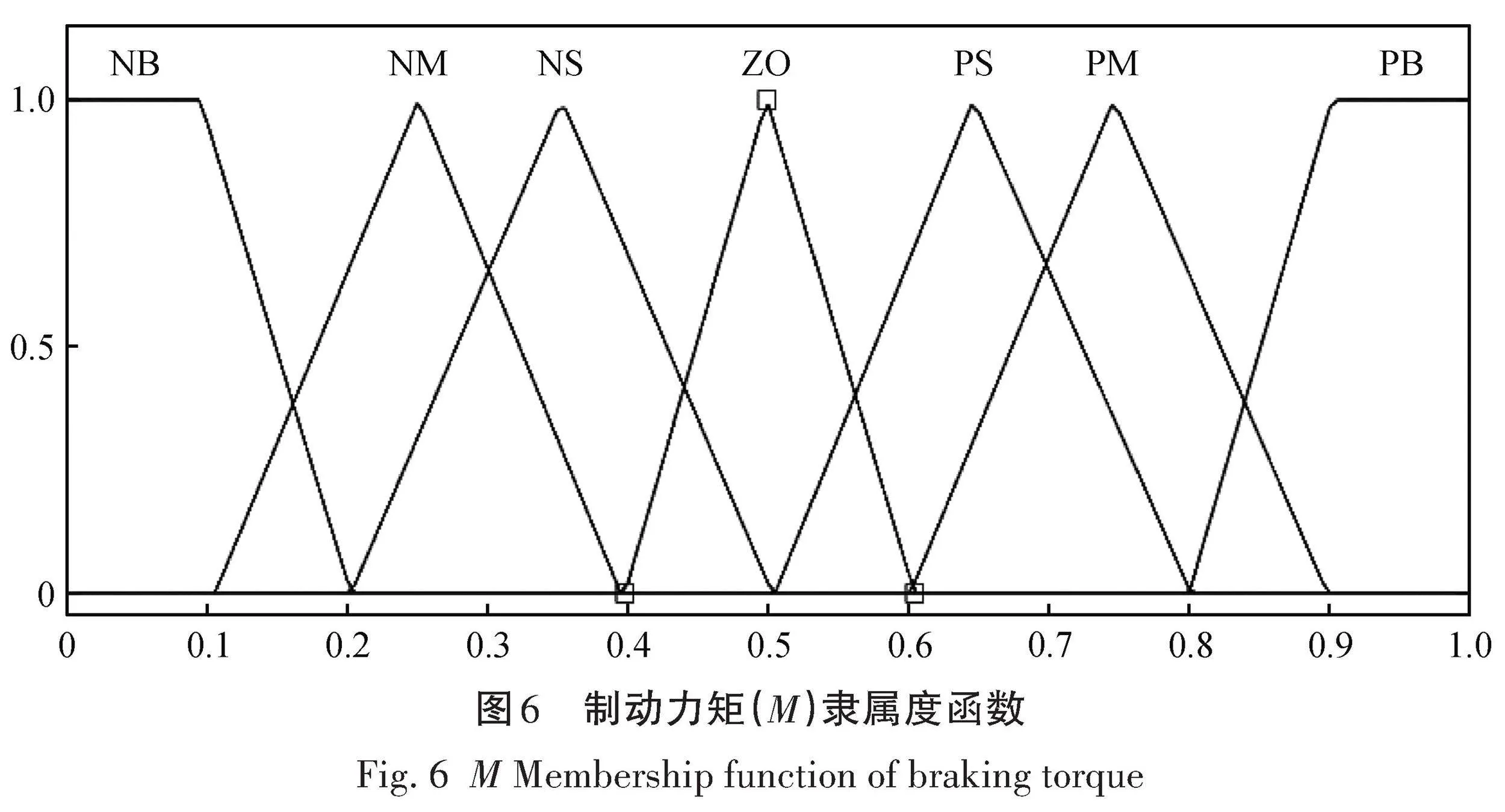
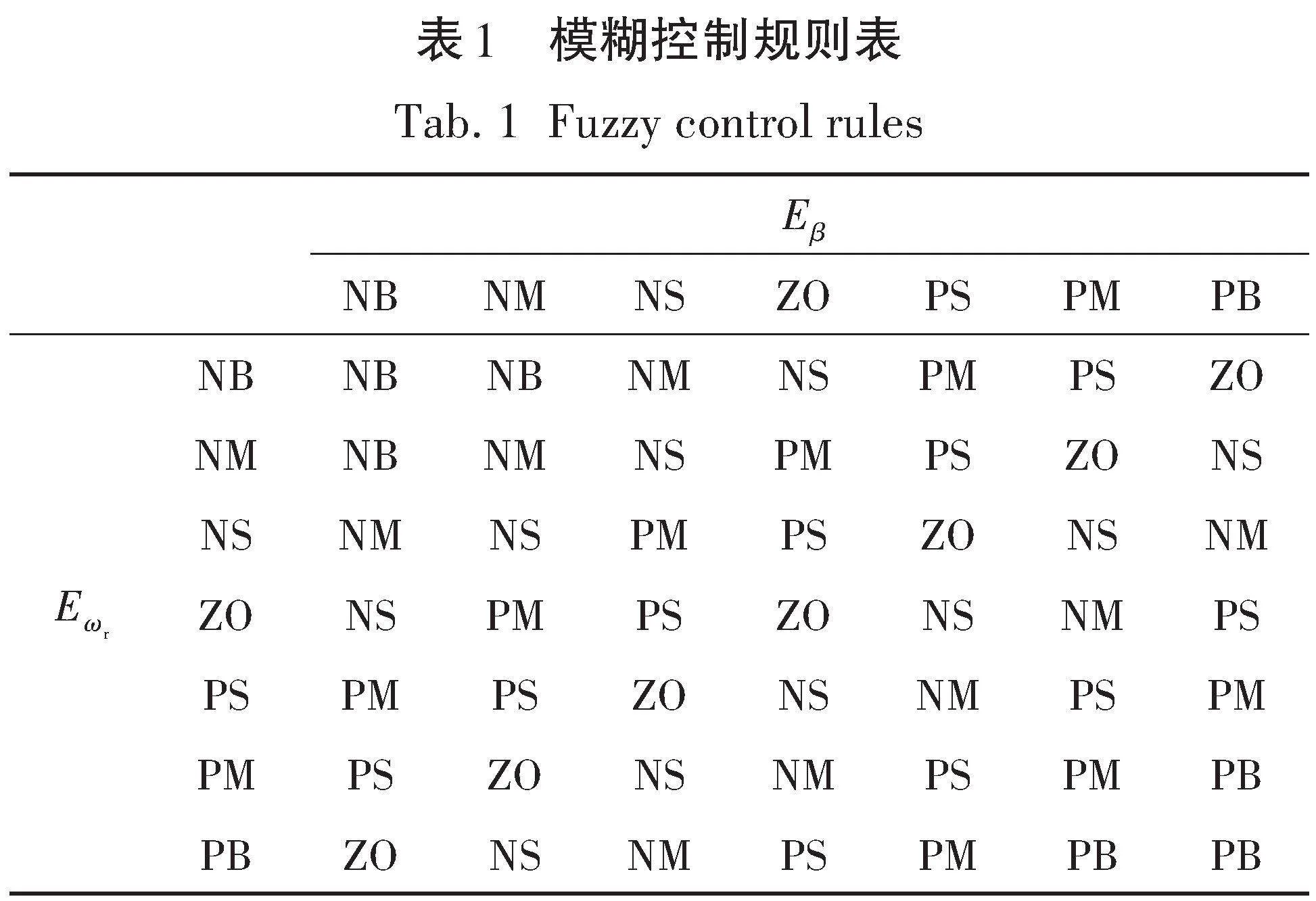
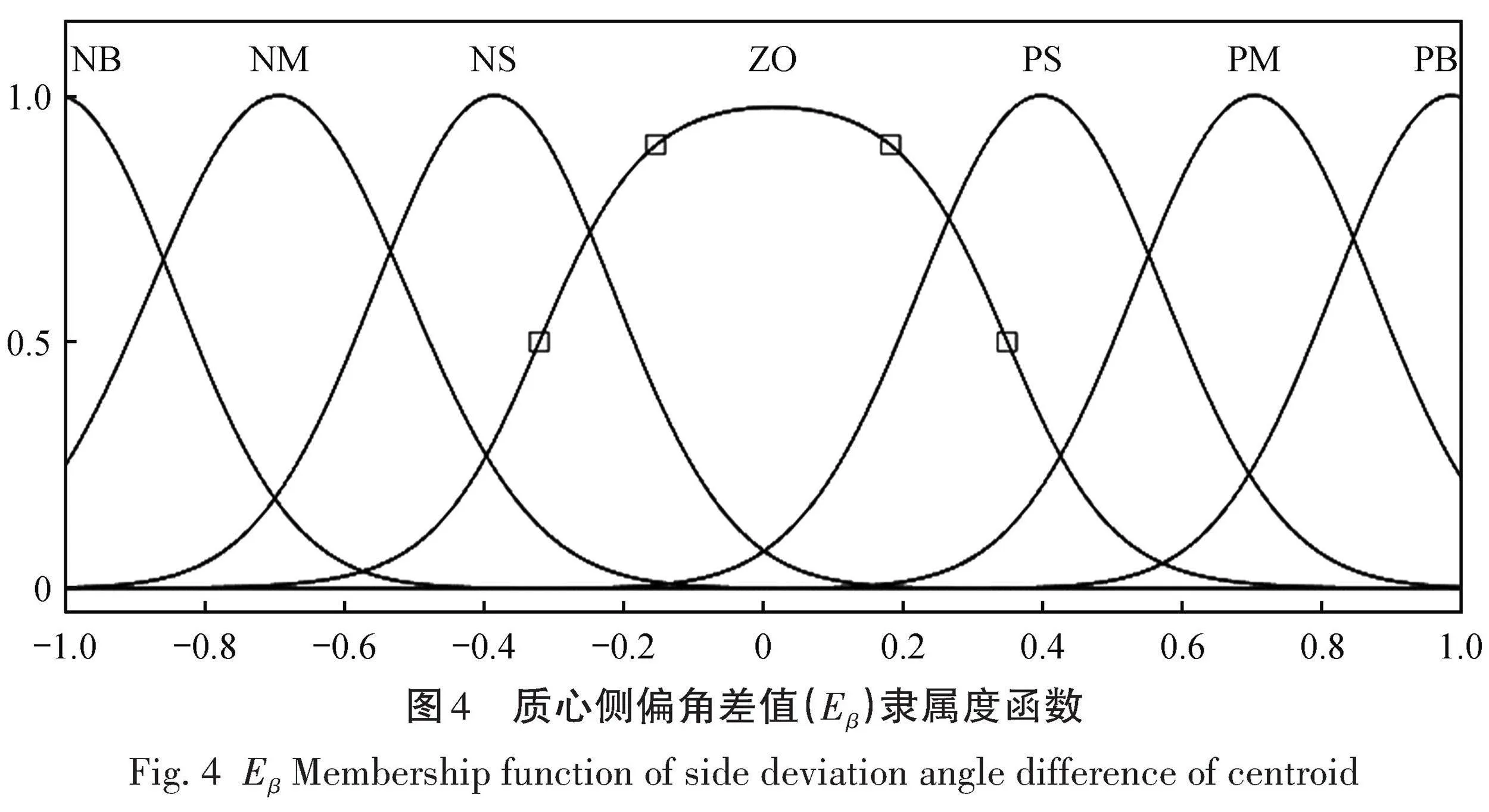
质心侧偏角差值的基本论域范围为[-0.25,0.25],设置模糊输入论域范围为[-1,1],因此设置增益4;横摆角速度差值的基本论域范围为[-0.5,0.5],设置模糊输入论域范围为[-1,1],因此设置增益2;补偿制动力矩的基本论域范围为[0,1 500],设置模糊输出论域范围为[0,1],增益K=1 500。由于2个输入变量均不是线性分布,因此隶属函数选择高斯函数结合广义钟形函数,而输出变量隶属函数选择三角函数。其中,输入、输出变量的模糊等级均选为7级,分别为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)[16]。
输入变量和输出变量的隶属度函数如图4—图6所示。
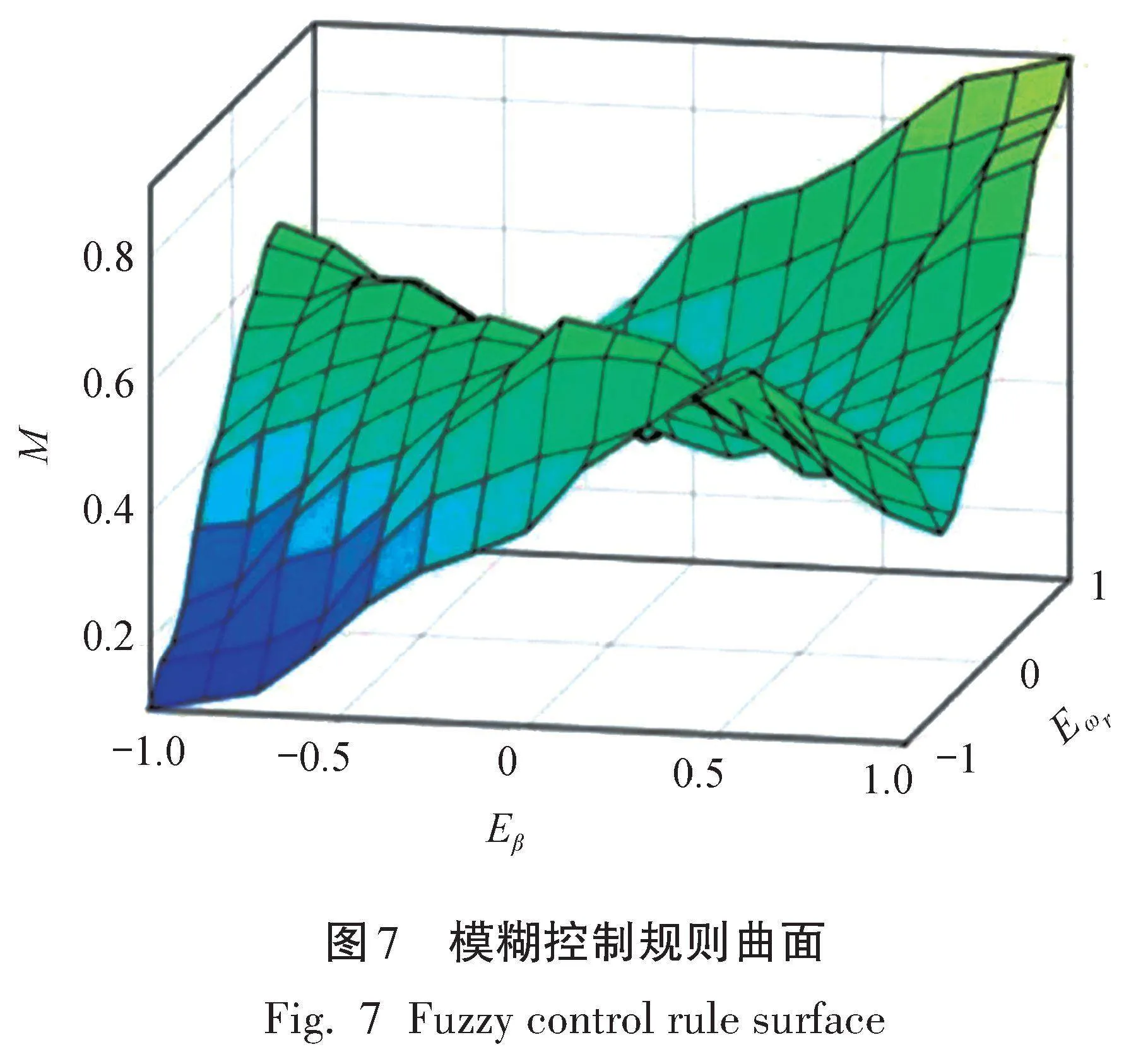
根据模糊控制理论,输入变量差值有变大或者变小的趋势时,输出量就要进行相应的变化以调节差值的变化,结合车辆控制过程中的专家研究经验制定相应的模糊控制规则,相应规则见表1。
对应的模糊控制规则曲面如图7所示。
2.3 转向比例控制
比例控制是一种控制四轮转向牵引车转向的常见策略,其特点是参数处理简单,且对于牵引车这种结构相对比较简单、控制精度不需要太高的四轮转向车辆,实现起来也相对容易。为提升转向精度,四轮转向车前、后轮转角应该遵循比例关系,以车辆的质心侧偏角为控制目标,在车辆稳态转向时车辆后轮的角度与前轮的角度保持比例关系
式中,K为车辆后轮与前轮角度的比例系数。
牵引车在单一前馈比例控制下,当横摆角速度超过一定阈值时容易失稳,因此在比例控制的基础上利用二自由度模型加入横摆角速度反馈控制[17]
式中,Kω为横摆角速度反馈控制比例系数。
根据上述两式,定义
式中,Ka为后轮角度与前轮角度比例数;Kb为后轮角度与横摆角速度反馈比例系数。
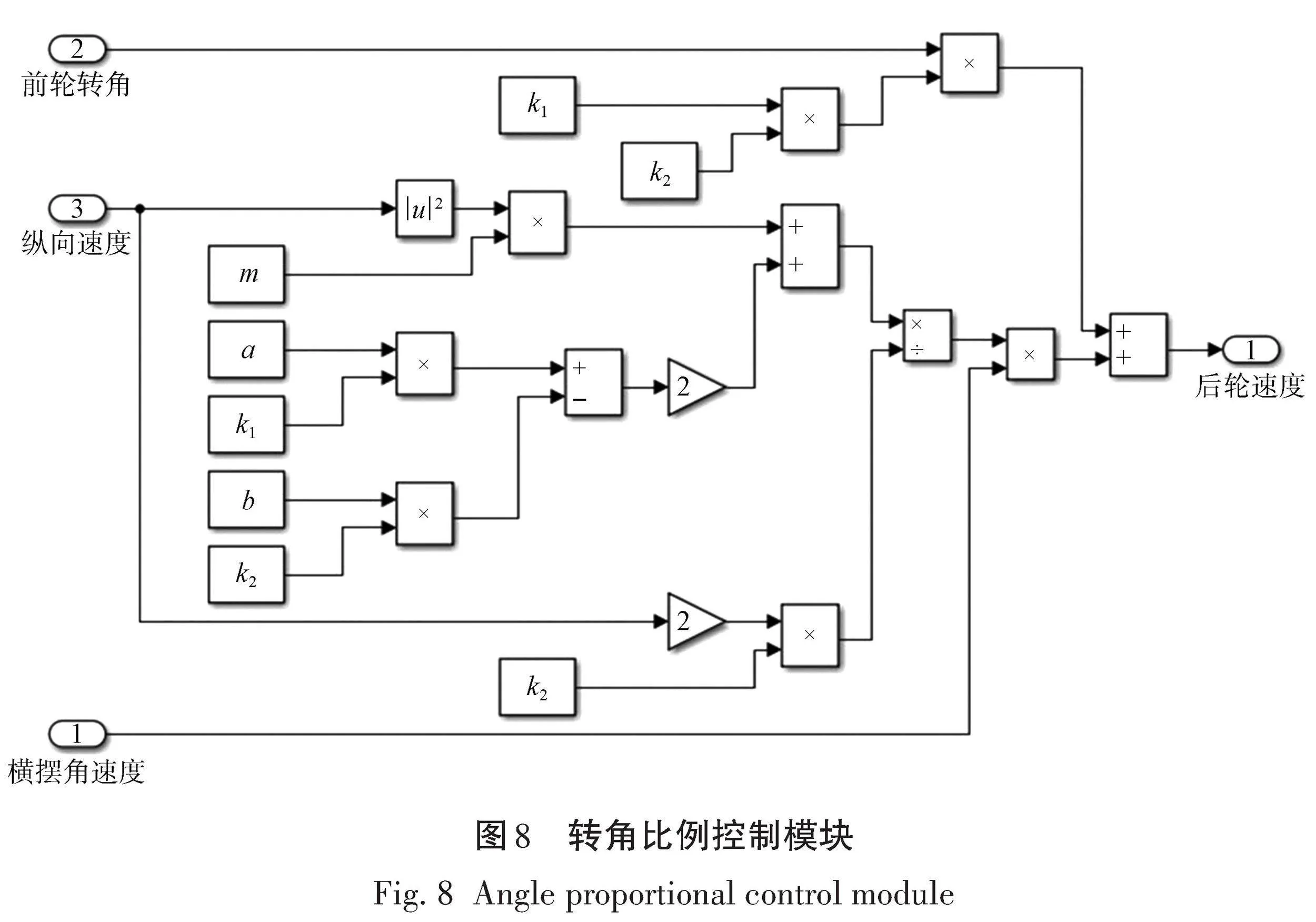
将上述表达式引入Simulink仿真平台模块 化,以牵引车纵向速度、前轮转角δ1与横摆角速度 wr作为输入,以后轮转角δ2为输出,模块如图8所示。
3 联合仿真与结果分析
牵引车物理模型的建立需要在CarSim平台设置相应的参数以还原牵引车仿真过程中的运动情况,其动力学参数见表2。
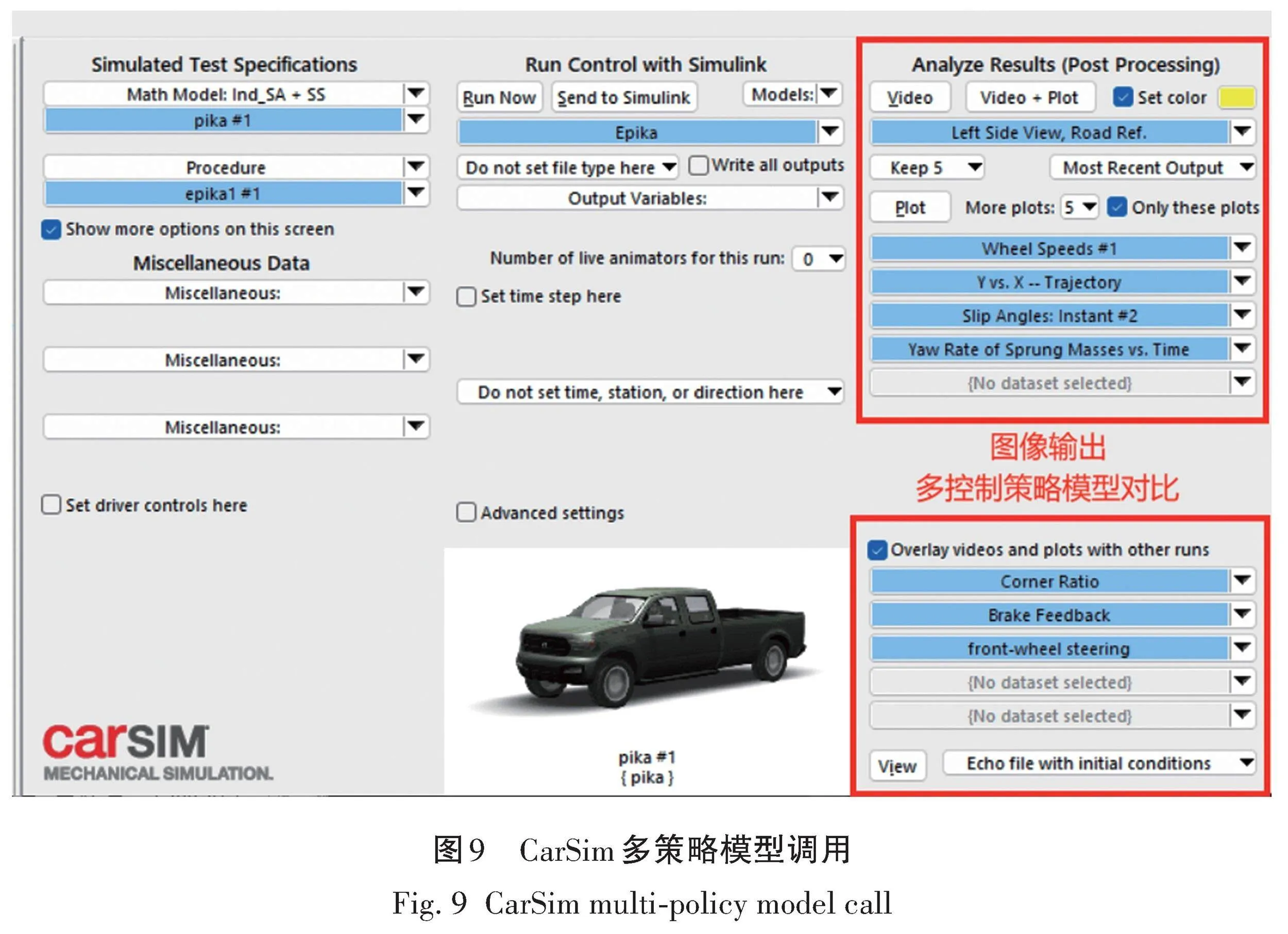
将表2内数据引入CarSim仿真平台构建牵引车模型,并建立负载模型,同时设置Simulink接口,调用不同控制策略模型控制进行对比。如图9所示。
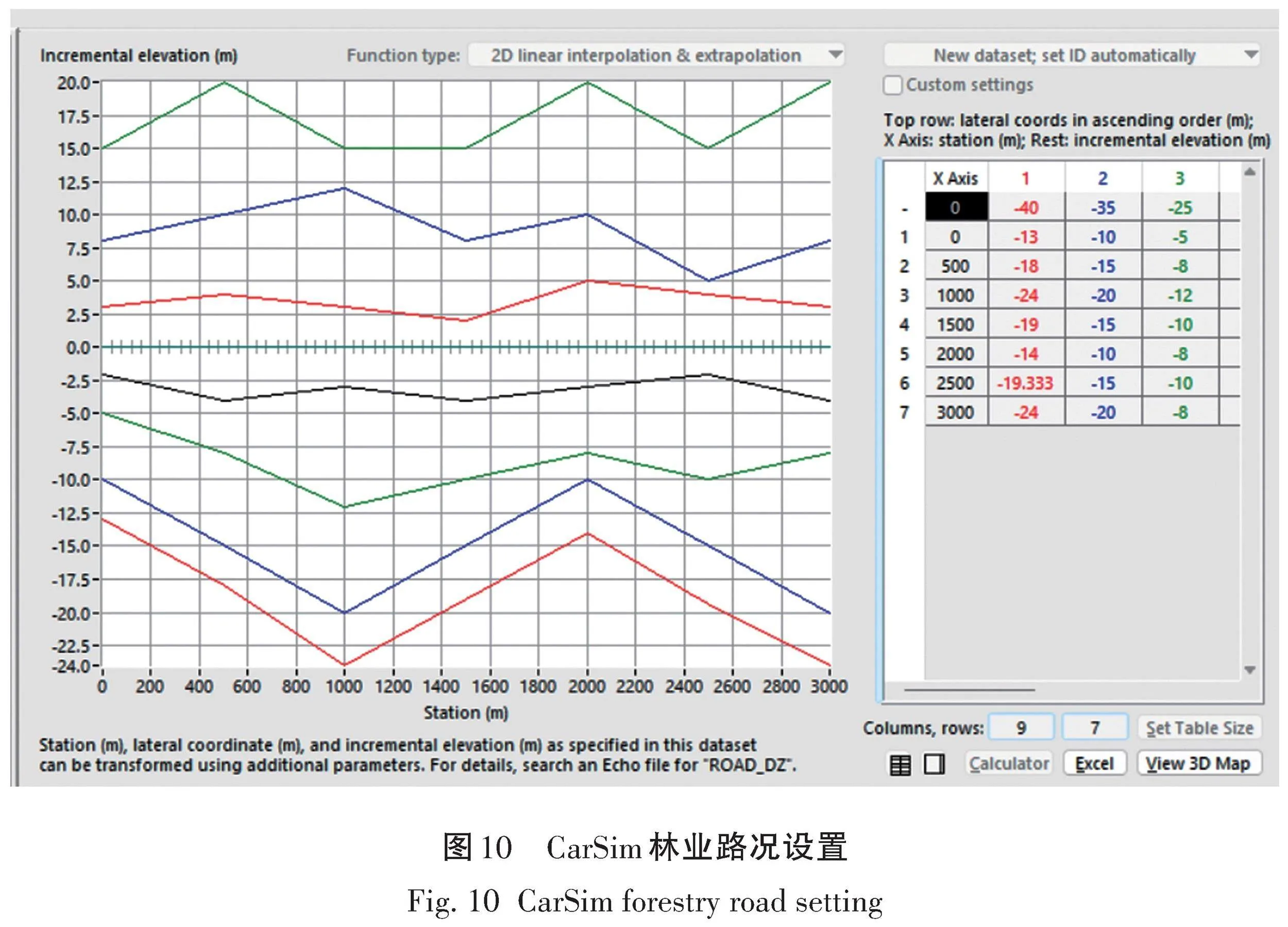
完成模型建立和联合接口调用设置后,对仿真道路环境进行设置。Carsim仿真平台可以设置道路三维几何形状与可变的道路摩擦系数,将路面平整度依据图10的规则进行设置,且将道路摩擦系数设为更接近山地路况。
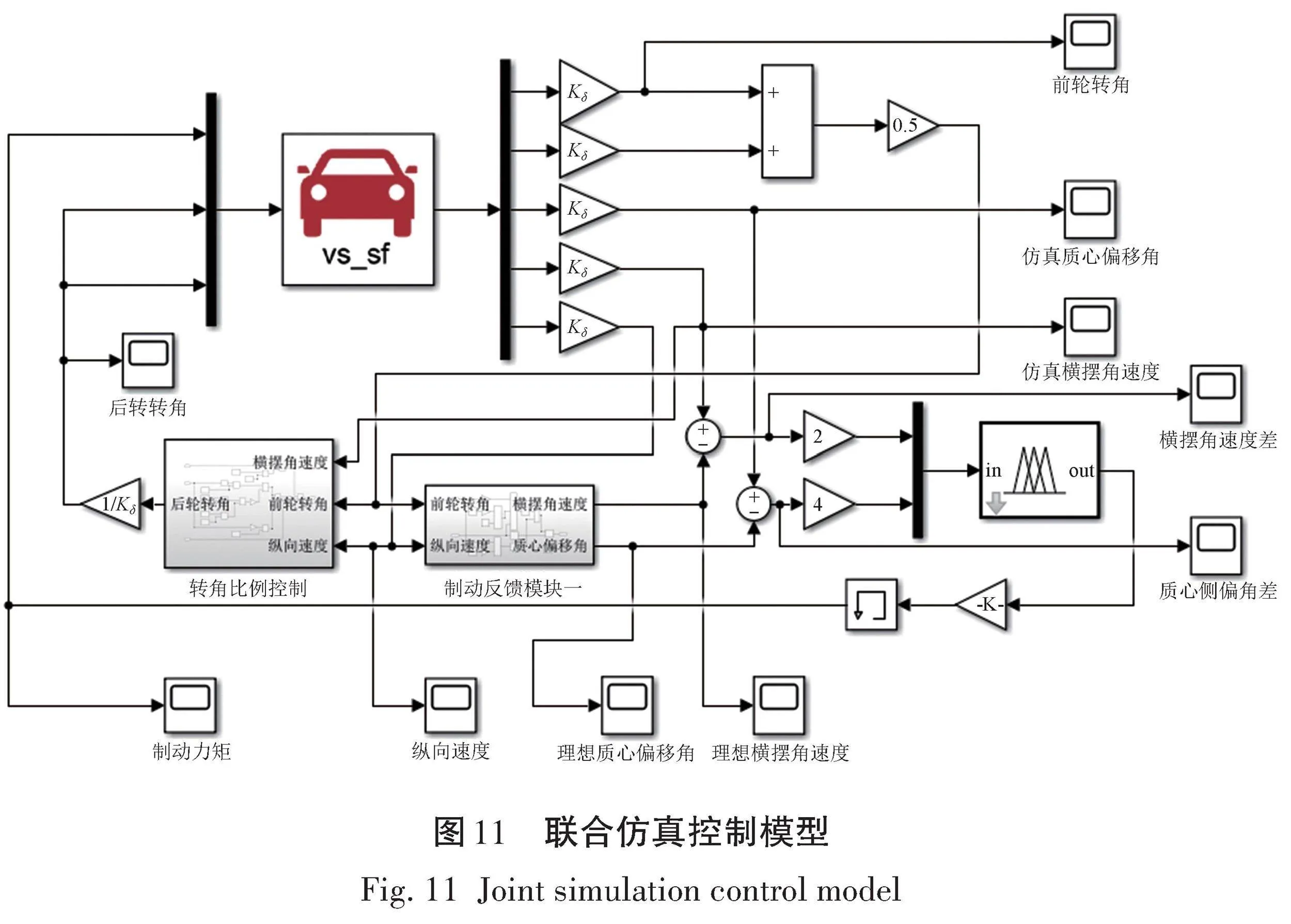
将在Simulink平台中建立的制动反馈模块、模糊控制模块、转角比例控制模块形成子模块调用,将CarSim中构建的物理模型模块以功能块的形式调用,并设置通信接口,在Simulink仿真平台搭建联合控制模型[18],如图11所示。其中,Kδ为车轮角度转换比例系数,其数值为180/3.14。
在CarSim平台中分别调用不同的牵引车负载模型,设置空载、负载20 t、负载100 t的情况进行行驶和转向测试,在每种负载情况下分别进行转角比例-制动反馈、前轮转向、转角比例、制动反馈4种控制策略下的仿真试验,并对比试验结果。
在CarSim平台中给牵引车前轮阶跃信号以 启动转向,车速保持在10 km/h低速状态下,联合Simulink平台模型进行仿真得到如图12—图14所示。
转向半径R为转向中心到前外转向轮与地面接触点的距离,转向半径越小,表征车辆转向机动性能越好;质心侧偏角为车辆质心速度与车辆正前进方向之间的夹角,反映车辆运动非线性程度和转向跟随特性,其在车辆理想运行状态下应该为0,表明车辆转向过程中不存在偏移,而质心侧偏角越大,牵引车转向过程越容易失稳[19];横摆角速度为车辆转弯时横向旋转速度,直接影响车辆稳定性,转向过程中越接近前轮转向控制下的稳态值,车辆转向灵敏度越高,越接近理想转向状态。牵引车最终稳态数据汇总见表3。
根据牵引车不同工况下转向半径数据,对比单独角度比例和制动反馈控制策略,二者结合的控制策略可以有效减少转向半径,提高转向速度,尽管效果较前轮转向控制稍有不足,但其在质心侧偏角和横摆角速度控制方面效果远优于前轮转向控制。
根据牵引车不同工况下质心侧偏角数据,本研究采取的转向比例-制动反馈控制策略和制动反馈策略均将牵引车质心侧偏角控制在较小范围内,有效保证了牵引转向过程中的稳定性。随着负载质量增加,牵引车质心侧偏角略微变大,但仍然有较好的控制效果。而前轮转向由于其控制特殊性,可以取得最小转向半径,但该控制方式下的牵引车质心侧偏角高达10°左右,稳定性较差。
根据牵引车不同工况下横摆角速度数据,本研究采取的转向比例-制动反馈控制策略比较单独的角度比例控制和制动反馈控制下的横摆角速度更接近前轮转向控制,也就是转向过程中的横摆角速度理想值,有效提升牵引车转向灵敏性。
在牵引车不同负载工况下,随着负载越重,牵引车转向半径略微增加,质心侧偏角略微减少,横摆角速度略微提升,对比其他控制策略,本研究策略均对牵引车转向半径、质心侧偏角和横摆角速度起到有效的控制效果,总体性能随负载变化不大,具有良好的适应性。
4 结论
本研究针对复杂路况下低速运行的林业运载牵引车的行驶和转向过程,基于车辆二自由度模型结合转向比例控制和模糊制动反馈控制进行控制策略的设计,并在CarSim-Simulink联合仿真平台进行牵引车物理模型的引入、控制策略的仿真模块设计、林间路况的定义与设置并进行联合仿真。仿真结果分析表明,通过采用转向比例-制动反馈控制的控制策略,牵引车在非平整路况下,无论空载还是负载都有效地减少了转向半径,提高了转向速度,并将质心侧偏角控制在了较小范围,保证了牵引车转向过程中的稳定性,且牵引车横摆角速度更接近理想转向状态,有较好的行驶稳定性和转向灵敏性,证明了本研究设计的控制策略对于牵引车在林业作业过程中运行性能的提升,且在控制策略方面,可扩展模型的建立为其他状况下控制策略的设计打下了基础,在本研究设计的模糊制动控制与反馈比例控制策略的基础上,还可以进行最优控制,以及神经网络等的智能控制策略,为林业作业车辆的仿真测试与控制优化提供了新思路。
【参 考 文 献】
[1] 高岩.浅谈林业调查规划设计工作存在的问题与对策[J].农家参谋,2020(8):112.
GAO Y.Discussion on the problems and countermeasures of forestry investigation planning and design[J].Farm Staff,2020(8):112.
[2] 曹海波,尹君,马春辉,等.林业机械设备设计的安全性探究[J].时代农机,2020,47(1):73-74,77.
CAO H B,YIN J,MA C H,et al.Research on the safety of forestry machinery and equipment design[J].Times Agricultural Machinery,2020,47(1):73-74,77.
[3] 方春杰.四轮转向汽车主动转向控制及仿真[J].汽车工业研究,2018(3):56-59.
FANG C J.Active steering control and simulation of four-wheel steering vehicle[J].Auto Industry Research,2018(3):56-59.
[4] 屈翔,张小锋,王伟,等.线控主动四轮转向汽车控制策略研究[J].重庆工商大学学报(自然科学版),2024,41(2):50-59.
QU X,ZHANG X F,WANG W,et al.Research on control strategy of active four-wheel steer-by-wire vehicle[J].Journal of Chongqing Technology and Business University (Natural Science Edition),2024,41(2):50-59.
[5] 祝栎严.主动前轮转向与差动制动系统横摆力矩可控制域研究及协调机制[D].南昌:南昌大学,2023.
ZHU Y Y.Research on control domain and coordination mechanism of yaw torque of active front wheel steering and differential braking system[D].Nanchang:Nanchang University,2023.
[6] 周兵,刘阳毅,吴晓建,等.主动前轮转向和直接横摆力矩集成控制[J].浙江大学学报(工学版),2022,56(12):2330-2339.
ZHOU B,LIU Y Y,WU X J,et al.Integrated control of active front steering and direct yaw moment[J].Journal of Zhejiang University(Engineering Science),2022,56(12):2330-2339.
[7] 田燃,肖本贤.四轮转向车辆的直接横摆力矩控制研究[J].机械设计与制造,2020(5):175-179,184.
TIAN R,XIAO B X.Research on direct yaw moment control of four-wheel steering vehicle[J].Machinery Design & Manufacture,2020(5):175-179,184.
[8] 魏晗.基于电动轮汽车四轮转向控制策略研究[D].镇江:江苏大学,2022.
WEI H.Research on four-wheel steering control strategy based on electric wheel vehicle[D].Zhenjiang:Jiangsu University,2022.
[9] 李琤.电动助力转向系统Carsim-Simulink联合仿真控制研究[J].机械设计与制造,2024(4):214-219,224.
LI C.Research of electric power steering system based on Carsim-Simulink co-simulation[J].Machinery Design & Manufacture,2024(4):214-219,224.
[10] 王媛.基于Simulink仿真的智能汽车横向控制研究[D].上海:上海电机学院,2023.
WANG Y.Research on horizontal control of intelligent vehicle based on simulink simulation[D].Shanghai:Shanghai Institute of Electric Machinery,2023.
[11] 高文俊,薛斌斌,庞振江.基于数字孪生技术电力仿真平台的研究[J].自动化技术与应用,2023,42(8):66-69.
GAO W J,XUE B B,PANG Z J.Research on power simulation platform based on digital twin technology[J].Techniques of Automation and Applications,2023,42(8):66-69.
[12] 何仁初,印大伟,侯明辉,等.基于Matlab/Simulink的乙烯精馏塔多变量预测控制仿真研究[J].自动化技术与应用,2014,33(5):37-43.
HE R C,YIN D W,HOU M H,et al.Simulation study of multivariable predictive control for ethylene rectifier based on Matlab/Simulink[J].Techniques of Automation and Applications,2014,33(5):37-43.
[13] 刘文营,刘伟,崔晓川.二自由度车辆动力学模型的扩展研究[J].中国测试,2016,42(S2):76-79.
LIU W Y,LIU W,CUI X C.Research on extension of two degree of freedom vehicle dynamics model[J].China Measurement & Test,2016,42(S2):76-79.
[14] 吴磊,王琪,张鹏.基于四轮转向与直接横摆力矩的汽车稳定性研究[J].机械设计与制造,2023(2):32-36.
WU L,WANG Q,ZHANG P.Research on automobile stability based on four-wheel steering and direct yaw moment[J].Machinery Design & Manufacture,2023(2):32-36.
[15] NAH J,YIM S.Vehicle stability control with four-wheel independent braking,drive and steering on in-wheel motor-driven electric vehicles[J].Electronics,2020,9(11):1934.
[16] 赵寻,任光胜.基于模糊PID跨座式单轨牵引车速度控制系统[J].中国科技论文在线精品论文,2020,13(2):156-162.
ZHAO X,REN G S.Speed control system of straddle monorail tractor based on Fuzzy PID[J].Highlights of Sciencepaper Online 2020,13(2):156-162.
[17] JING C Q,SONG Y T,LUO S.Hierarchical control for distributed drive electric vehicles based on four-wheel steering[J].Vehicle Noise and Vibration,2023,19(3/4):212-243.
[18] 沈子鉴,李刚,曾庆东.CarSim和Matlab/Simulink联合仿真分布式驱动电动车ACC研究[J].重庆理工大学学报(自然科学),2021,35(9):35-41.
SHEN Z J,LI G,ZENG Q D.Research on ACC for distributed drive electric vehicle based on CarSim and Matlab/Simulink joint simulation[J].Journal of Chongqing University of Technology(Natural Science),2019,35(9):35-41.
[19] 邓召文,孔昕昕,高伟.重型半挂汽车列车主动转向控制策略研究[J].现代制造工程,2021(10):17-24.
DENG Z W,KONG X X,GAO W.Research on active steering control strategy of articulated heavy vehicles[J].Modern Manufacturing Engineering,2021(10):17-24.