新工科建设背景下无人驾驶开放创新实践教学模式研究
2024-10-22 00:00:00柴锦张庆吴涛李东辕
中国教育技术装备 2024年18期



摘 要 无人驾驶作为跨学科的代表性领域之一,对于培养符合新工科要求的人才具有重要意义。基于穿透式学习理论,构建竞赛驱动的层次化无人驾驶开放创新实践课程体系。该体系通过拆解无人驾驶相关竞赛中的获奖案例,反向设计创新实践教学内容,发掘实践教学资源,以高阶性、创新性和挑战度为课程建设标准,采用开放式教学,培养学生的自主学习能力、创新思维和解决复杂工程问题的能力,实现知识向能力的转化。实践表明,层次化开放创新实践教学模式具有良好的教学效果。
关键词 新工科;无人驾驶;以赛促学;穿透式学习;竞赛;实践教学;创新能力
中图分类号:G642.44 文献标识码:B
文章编号:1671-489X(2024)18-0153-04
0 引言
无人驾驶涉及传感器技术、控制理论、人工智能等多学科的前沿知识,具有较高的复杂性和挑战性[1-2]。在新工科建设背景下,无人驾驶实践教学成为培养学生实践能力和创新能力的有效手段。
目前,部分高校已经开展了无人驾驶实践课程教学,取得了较好的教学效果。例如:黄瑞等[3]以无人驾驶为教学载体开展车辆工程专业课程设计与实践教学,加深学生对前置专业理论课程的理解;周浩然等[4]开发无人驾驶教学实验平台,将兰州大学的无人驾驶课程从仿真教学改为仿真和实物结合的教学模式,开展人工智能学科等多学科交叉的教学实践;王雨蒙等[5]开发ROS智能车并设计ROS智能车实验课程,依托智能汽车专业课程汽车智能化技术开展实验教学,助力智能汽车人才培养。
上述基于无人驾驶的实践课程具有一定的创新性和实用性,但大都是为汽车专业人才培养作支撑。工程训练中心作为全校各专业学生的实践实训和创新创业基地[6],无学科和专业属性,依托工程训练中心开发无人驾驶开放创新实践课程,更有利于跨学院、跨学科的交叉复合型人才培养,契合新工科人才培养的要求。
1 “以赛促学”的层次化无人驾驶开放创 新实践教学设计
随着人工智能理论与技术超乎的迅猛发展,智能化时代已然到来[7]。在智能化时代,学生获取知识的途径丰富多样,因此,教学不应该只是传授理论知识和实践技能,更要注重新工科人才培养要求,构建将基本技能与主流技术结合、理论知识与实际项目结合的课程框架,引导学生主动思考和自主学习,使人才培养模式从知识传授向能力培养转变[8-9]。穿透式学习是一种基于学习科学理论的高效率学习方式,要求先从实干世界走出来寻求知识和技能,然后再回到实干世界使用,其核心目的是掌握实际技能和提供产出,将所学知识转化成能力,形成知识体系[10]。
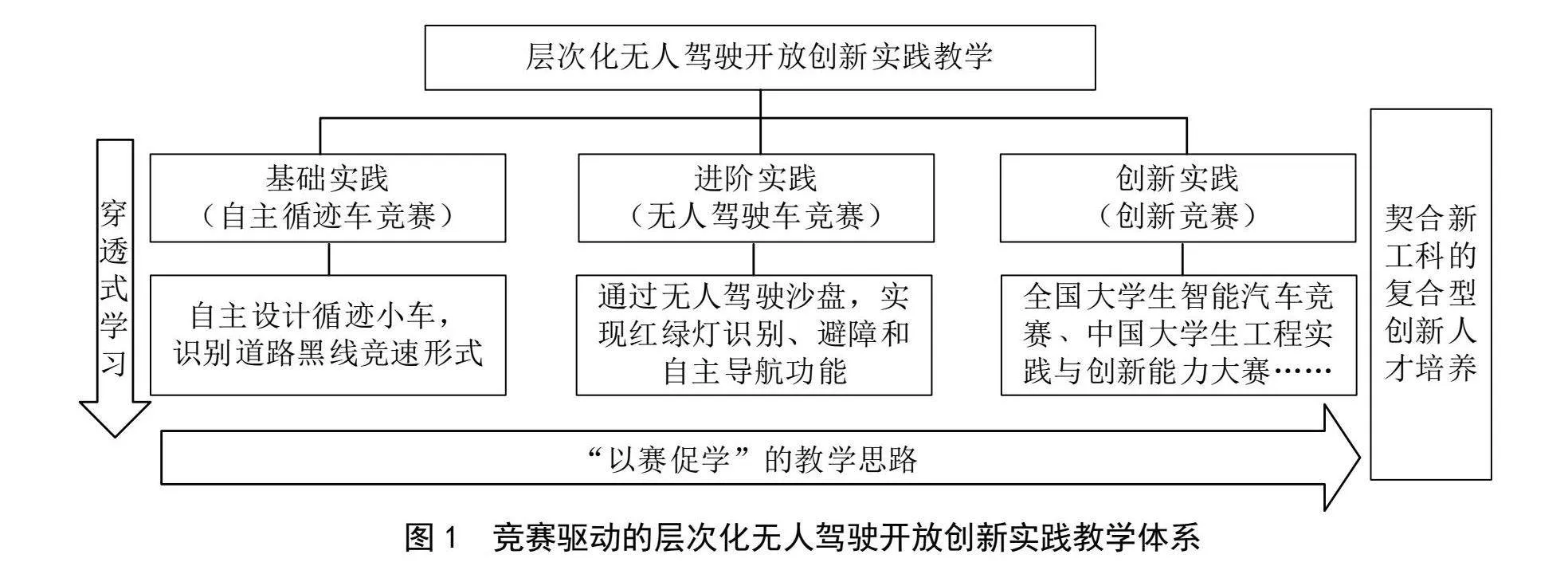
基于国家创新驱动发展战略,针对产业前沿领域和社会发展对工程人才创新能力的需求,教育部相应的指导委员会设计了多样化的竞赛项目[11],贴合生活实际,能够激发学生的学习兴趣。同时,学科竞赛有评价、诊断、反馈、激励等多种功能,可以促进课程教学、检验课程教学质量。本文基于穿透式学习理论,构建竞赛驱动的层次化无人驾驶开放创新实践教学体系,以培养符合新工科要求的复合创新型人才,如图1所示。通过拆解实干世界的竞赛获奖案例,深入挖掘实践教学资源,反向设计基础实践、进阶实践和创新实践的层次化教学内容,帮助学生掌握相关知识和技能,最后以竞赛成果作为人才培养的外在可观测结果,助力新工科人才培养质量的提高。
2 基础实践课程设计
2.1 实验项目
无人驾驶开放创新实践课程以兴趣为导向,面向全校各专业开设。为适应学生专业差异大、学科知识跨度大的状况,基础实验项目以搭建自主循迹车为教学载体。学生通过制作自主循迹车,完成对道路黑线轨迹的识别并实现在整个路况下的行驶。可以开设的基础实验项目如表1所示。学生可以了解无人驾驶智能车的运行原理,掌握单片机、循迹传感器、电机控制、机械结构设计、算法设计等基础知识。
2.2 授课方式
基础实践采用课堂案例式教学方式,通过高年级学生参加全国大学生智能汽车竞赛的经验和收获导入,激发学生兴趣。教师将循迹智能车按照功能和模块拆解成机械、硬件和软件三个子模块,介绍每个功能模块的常用技术、方法和学习方法,为学生提供模型车底盘、电机、锂电池和传感器、单片机等开源零部件,学生需要自行组装智能车模、编程,使小车准确执行下发的控制指令,实现从无到有的自主循迹车的搭建、设计与开发。在整个过程中教师引导学生自主学习,让学生对无人驾驶车机械结构、传感技术、电子技术和控制理论等多学科知识进行有效关联,了解自动循迹车的整体框架和嵌入式技术要点。基础实践课程旨在帮助学生巩固基本知识、强化实践技能,并充分了解穿透式学习的方法,提高自主学习能力。
2.3 考核方式
基础实践课程从知识、能力和素质等方面进行多元化的考核。考核方式由课堂提问、成果展示和提交研究报告三部分组成,分别占比20%、60%和20%。课堂提问主要考查学生对相关知识点的掌握程度。成果展示的形式为循迹竞赛,竞赛结果直观有效,对学生而言,既是完成考核任务,也是研究成果展示,更是实现自我挑战与超越,激发学习兴趣。研究报告主要内容为各模块的设计方案和个人收获总结。
3 进阶实践课程安排
3.1 实验项目
进阶实验项目面向已完成基础实践训练的学生,以基础实践课程搭建的无人驾驶车为载体,添加车载电脑、显示屏、摄像头,利用卷积神经网络构建摄像头数据和小车拐弯角度之间的关系,进而控制小车沿着车道线行进,并利用YOLO目标检测架构,对红绿灯、障碍物、车速标志牌等进行检测,控制小车应对道路上的各种问题,进行自动驾驶。无人驾驶沙盘和无人驾驶车如图2所示。进阶实践课程主要针对无人驾驶技术中的车辆控制技术和系统决策机制,以及控制、感知、深度学习等技术的交叉融合,形成衔接紧密的知识体系。
3.2 授课方式
进阶实践课程依托无人驾驶沙盘平台进行开放式教学,采用“教师引入—学生组队—自主学习—弹性指导”的授课方式。教师对系统的功能、组成进行介绍,说明设计要求。学生自行组队,要求每个团队必须包含来自不同专业的学生,采用穿透式学习方法进行自主学习。学生对实验项目要求的任务进行拆解,拆解后的子任务包括传感器、感知与定位、深度学习的设计与应用、路径规划算法及控制优化等,自主查阅资料研究无人驾驶各模块技术原理并完成相关功能开发,实现相关知识的关联。通过该实验,学生可以学会拆解并协调整合各个子任务,提高分析复杂问题的能力和自主学习能力。
3.3 考核方式
进阶实践课程从知识、能力和素质等方面进行多元化考核。考核方式由分组答辩、成果展示和提交研究报告三部分组成,分别占比20%、60%和20%。分组答辩时要求学生对无人驾驶车的结构组成、功能、运行原理、控制算法进行讲解汇报,并在无人驾驶沙盘系统上进行成果展示,完成自主循迹、车道线识别、红绿灯识别、交通避障等规定功能。成果具有创新性的可以获得额外加分,这促使学生积极探索、主动学习,不断挑战自我,取得更好的学习成果。研究报告主要内容为无人驾驶车的国内外研究现状、无人驾驶车设计方案和个人收获总结。
4 创新实践课程设计
4.1 实验项目
创新实践课程为设计性实验,面向有一定基础的学生。以学科竞赛为引领,以社团辅助管理为保障,以实验室开放为支撑,教师对学生进行弹性指导,鼓励并引导不同专业的学生组成团队,参加全国大学生智能汽车竞赛、中国大学生工程实践与创新能力大赛等高水平科创竞赛,将竞赛作为课程教学的重要一环,激发学生的创新热情和潜能,培养学生的团队合作精神,让学生直面挫折和挑战,提高在实践中掌握新知识、应用新知识的能力,提高创新思维能力和解决复杂工程问题的能力。
4.2 授课方式
创新实践课程采用开放式教学,学生组成创新团队自主完成。教师团队分析解读中国高等教育学会每年发布的全国普通高校大学生竞赛排行榜,学生团队选择感兴趣的赛事,自主查阅文献资料、设计创新项目方案并进行展示,师生讨论优化后立项,由学生团队主导实施。图3为学生参加中国大学生工程实践与创新能力大赛和全国大学生智能汽车竞赛的作品。教师在该实践教学阶段的功能定位是保障实践条件和实践安全,引导学生坚持正确的研究方向,对学生研究中遇到的问题提供解决思路,鼓励学生运用新思路、新技术实现研究任务,指导学生撰写论文、申报专利,培养学生的创新思维和知识产权保护意识,观察并记录学生在实践过程中的综合表现,做好开放实践的统筹管理工作。
4.3 考核方式
创新实践课程将实践过程记录和竞赛成果作为学生创新意识和自主学习能力的重要表征。通过参与竞赛,学生能够将所学理论知识与实践技能相结合,运用穿透式学习方法解决实际问题。在竞赛过程中,学生需要围绕大赛主题进行深入研究和探索,完成总体方案设计、机械结构设计与制造、程序代码编写、视觉图像处理、传感器应用、优化调试、撰写技术报告等一系列任务,在大赛中展示项目成果,接受评委的评审,答辩,与其他参赛队伍进行交流和分享。通过该实验项目,培养学生的创新思维和实践能力,提高学生解决复杂工程问题的能力和团队协作能力。
5 结束语
针对无人驾驶开放创新实践教学模式进行研究与探索,践行以学生为中心的教学理念,改变“先知识后能力”的人才培养逻辑,将其转变为“先能力后知识”,推动学生不断锻炼思维,增强对新知识的接纳能力和想象力。基于穿透式学习理论,构建竞赛驱动的层次化无人驾驶开放创新实践教学体系,层层递进、难易结合,实现不同学科知识的有效关联,培养具有自主学习能力、创新思维和解决复杂工程问题能力的新工科复合型人才。从近三年的实施效果来看,经过该课程培训的学生参加学科竞赛,获得全国大学生智能汽车竞赛一等奖10项、二等奖8项,获得中国大学生工程实践与创新能力大赛金奖3项、银奖2项。该教学体系在实践中获得良好的效果,契合新工科人才培养的要求。
6 参考文献
[1] 王茂森,鲍久圣,谢厚抗,等.隧道环境内无人驾驶车 辆目标—决策两级信息融合感知策略[J].中国机械工 程,2024,35(3):427-437.
[2] 王金强,黄航,郅朋,等.自动驾驶发展与关键技术综 述[J].电子技术应用,2019,45(6):28-36.
[3] 黄瑞,俞小莉,杨爱喜,等.基于无人车竞赛的车辆工 程专业课程实践教学方案设计[J].实验室研究与探索, 2022,41(1):201-205.
[4] 周浩然,俞挺挺,郅朋,等.“新工科”模式下无人驾 驶教学实验平台实践与探索[J].微纳电子与智能制造, 2020,2(1):116-121.
[5] 王雨蒙,王欣,朱冰,等.ROS智能车创新性实验设计 及教学应用[J].实验室研究与探索,2023,42(6):182- 186.
[6] 胡蔓,曹利华,刘健,等.新工科背景下高校工程训练 中心建设探索与实践[J].实验室研究与探索,2021, 40(5):154-157,196.
[7] 眭依凡,幸泰杞.挑战与应对:人工智能时代的高等教 育创新发展逻辑[J].科教发展研究,2023,3(1):76-95.
[8] 周燕云,李洪涛,石飞,等.项目分阶段引导的主动式 实践教学方法探索[J].实验室研究与探索,2023,42(7): 233-236,251.
[9] 王毅,张沪寅.以赛促学实践教学体系下的穿透式案例 设计[J].计算机教育,2021(6):36-41.
[10] 方军.穿透式学习[M].北京:机械工业出版社,2020.
[11] 李双寿,张晓晖,胡庆夕,等.面向新工科的工程实践 与创新能力竞赛平台构建[J].实验技术与管理,2023, 40(1):185-190,202.