旋翼无人机仿生栖息机械臂设计
2024-10-19 00:00刘九庆刘凡朱斌海
森林工程 2024年4期









摘 要:为满足旋翼无人机执行林区内定点监测、侦查等任务,通过对鸟类栖息过程研究及腿足仿生研究,设计一种仿生栖息机械臂。对整机进行模块化设计及运动学分析,腿部模块使用机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems,ADAMS)进行运动学轨迹仿真,爪部模块使用D-H(Denavit-Hartenberg)参数法取得趾尖运动学方程,通过MATLAB仿真得到爪部模块趾尖的工作空间点云分布。制作样机搭建试验系统,分别对趾部活动范围以及整机栖息能力进行试验验证。该设计结构简单,易操控,可完成试验室阶段的栖息行为。
关键词:仿生设计; 栖息机构; 绳驱动; 计算机仿真
中图分类号:V279+.2 文献标识码:A DOI:10.7525/j.issn.1006-8023.2024.04.016
Design of Bionic Perching Robotic Arm for Rotor Drone
LIU Jiuqing∗, LIU Fan, ZHU Binhai
(College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China)
Abstract: To meet the requirements of fixed-point monitoring and reconnaissance tasks within forest areas by rotary-wing drones, a bionic perching robotic arm is designed through the study of birds' perching processes and the bionic research of legs and feet. The modular design and kinematics snalysis of the whole machine are carried out. The leg module employs Automatic Dynamic Analysis of Mechanical Systems (ADAMS) for kinematic trajectory simulation, while the claw module uses the D-H(Denavit-Hartenberg) parameter method to obtain the kinematic equation of the toetip. The workspace point cloud distribution of the claw module's toetip is derived through MATLAB simulation. A prototype is fabricated to establish an experimental system, which is then used to verify the activity range of the toe part and the overall perching capability of the machine. This design is simple and easy to control, capable of completing perching behavior in the laboratory stage.
Keywords: Bionic design; perching mechanism; tendon-driven; computer simulation
0 引言
旋翼无人机在林业领域中的应用越加广泛,因其具有灵活性、实时性、经济性、操作便捷、影像高分辨和受地形影响较小等特点,使林业资源调查和监察工作的质量和效率大幅度提升。其在林业资源调查和监测中的应用主要有林业资源调查规划、病虫害监测、生物信息提取和森林消防侦测等[1]。
由于旋翼无人机体积及起飞质量的约束,其续航能力受到极大限制,如今主流动力源为锂电池和燃料电池,以当前技术,锂电的可靠性、便携性更胜于燃料电池。在动力源的技术革新未有显著进展的情况下,通过各种技术手段以使旋翼无人机得到尽可能长续航是许多学者的研究方向。在林业应用领域,旋翼无人机在执行任务时,会遇到定点监控的任务需求,无人机悬停于林木之上会持续消耗能源,而茂密的林木又阻碍旋翼无人机的降落,因此需要开发一种可以使旋翼无人机能在林中栖息进行定点监控的装置。
当前,微型无人机的栖息方式主要有:机械抓扣式;仿生机械抓扣式;仿生针刺、微棘式;负压吸盘式;螺旋桨式;粘胶式;电磁式;等[2]。结合林业领域工作环境,本设计选取仿生机械抓扣式的栖息方式。现阶段的仿生机械抓扣式栖息机构仍有设计结构复杂,重量和体积过大等不足[3-11]。本研究设计了一种旋翼无人机仿生栖息于林木树枝上的机械臂机构,通过对鸟类腿及爪的形状、功能仿生,仿照其在树枝的栖息行为,完成旋翼无人机的树枝栖息动作,以此解决旋翼无人机林中定点监测中消耗续航时长的痛点。
1 鸟仿生栖息结构设计
1.1 设计要求
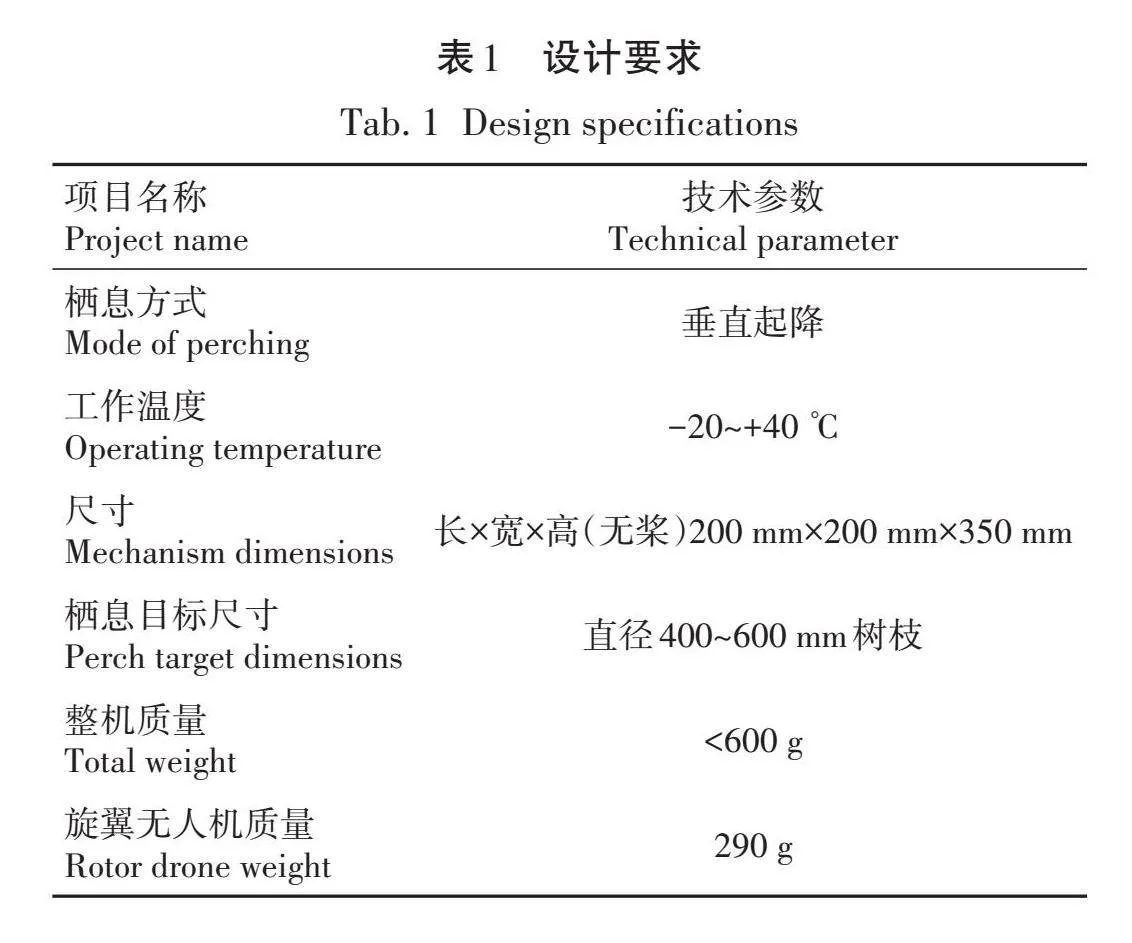
设计一种轻量型、高适应性、高效能的林用四旋翼无人机仿鸟类腿足机械臂,主要应用于旋翼无人机的树枝栖息。首先确定机械臂设计要求,见表1。
1.2 仿生设计来源
与大部分灵长类动物进化方向不同,鸟类属于趾行动物,相比于灵长类动物的跖行性,趾行性动物具有行动更加敏捷、迅速等特点。趾行性动物趾部十分灵活,可以迅速完成抓握、栖息等行为,这些特点使鸟爪的仿生被当今众多学者重点研究,希望能从中得到无人机在复杂环境下栖息及抓取特定目标动作的启发[10]。
自然界中鸟类种类繁多,在鸟纲中,存在多种不同的脚趾排列方式,其大多与鸟的生活方式和生态位有关[12-13]。
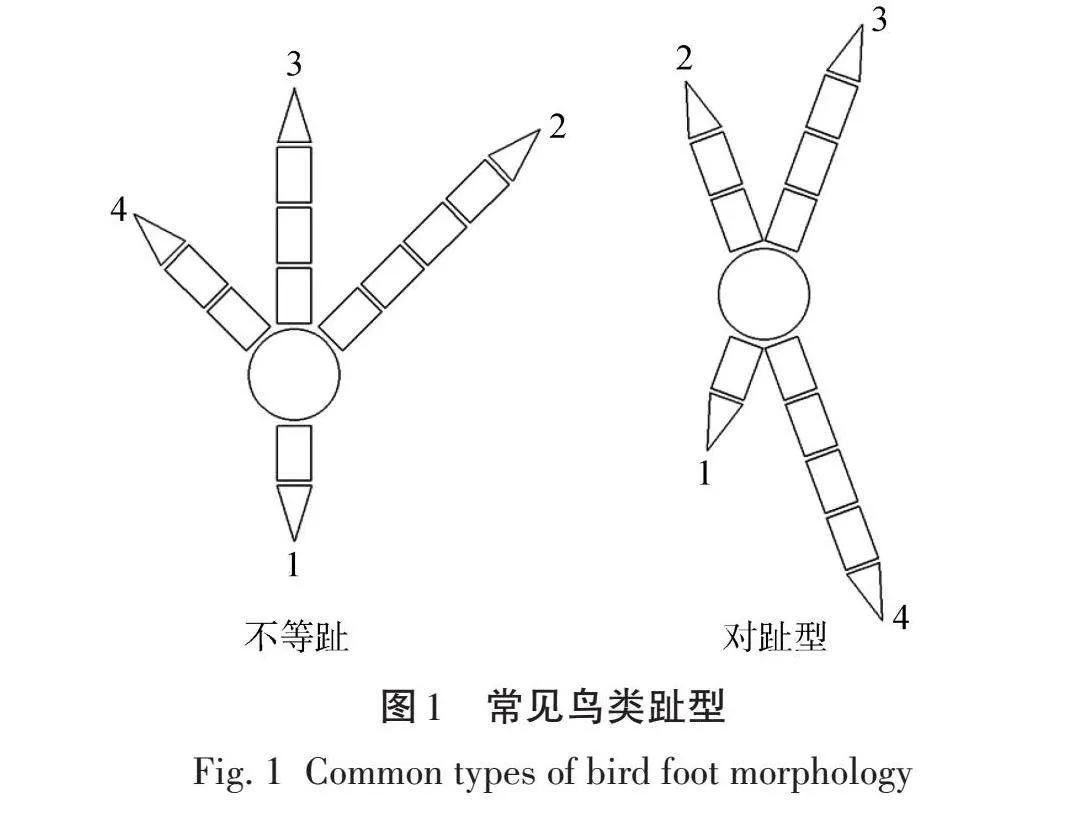
鸟类常见趾型有不等趾型、对趾型等,如图1所示。
不同趾型的鸟类均可以完成栖息行为。在此设计中采用对趾型,以此保证鸟爪仿生部分机构每根趾栖息动作的一致性。
本研究选取牡丹鹦鹉作为仿生研究对象,在众多鸟类中,牡丹鹦鹉较为常见,常常作为人类的宠物出现在大众视野中,因此研究样本较为容易取得。且宠物鹦鹉多数时间常立于横杆上而非飞行,因此可较为方便观察其栖息时足部的形态。
牡丹鹦鹉是一种小型的鹦鹉,属于鹦形目鹦鹉科牡丹鹦鹉属。成年后体长约13~17 cm,体重约40~60 g,腿长约为1.5 cm,粗约为0.3 cm,颜色为灰色。爪部有4个趾,其中2个向前,2个向后,即为对趾型,这样可以方便地抓住树枝或食物。趾上有锐利的爪,可以用来防御或攻击。图2为牡丹鹦鹉在抓握和站立姿态时不同的爪形。
牡丹鹦鹉由2对股骨、胫跗骨、跗跖骨组成腿部结构,有2爪,每只爪有16块趾骨,每足4趾,第1趾(后趾):3块;第2趾(内侧趾):4块;第3趾(中间趾):5块;第4趾(外侧趾):4块趾骨。
1.3 仿生栖息结构设计
通过鸟类解剖学的研究和分析,确定机械臂整机的结构包括腿部和爪部2个模块,动力通过肌腱传递。
1)腿部模块
机械臂的腿部模仿于鸟类股骨、胫跗骨、跗跖骨3个部分。上下连杆成一定初始角度,通过重力影响弯曲折叠,为爪部提供抓握过程中初步的抓握力。以股骨作为平台连接旋翼无人机,并且承担爪部模块主动驱动部分的放置。考虑到成本及平衡问题,腿部模块采用相同结构并镜像放置。
2)爪部模块
爪部模块连接于腿部模块下端,作为整机的末端执行装置,爪部模块的作用十T5lS7Lx4CuwtcWr9KkmUFi+jJdjC+C+fRmeoE4mRmEc=分重要。通过对牡丹鹦鹉爪部的分析进行设计,降落过程中,爪部预弯曲的初始状态有助于对目标抓握的快速响应。
3)肌腱
肌腱作为腿部和爪部模块的动力衔接部分,在整机的设计中至关重要,需要其具有较高的断裂强度、耐磨性,一定的延展性和柔性,并且质量较轻,以保证在整机中的动力传递。
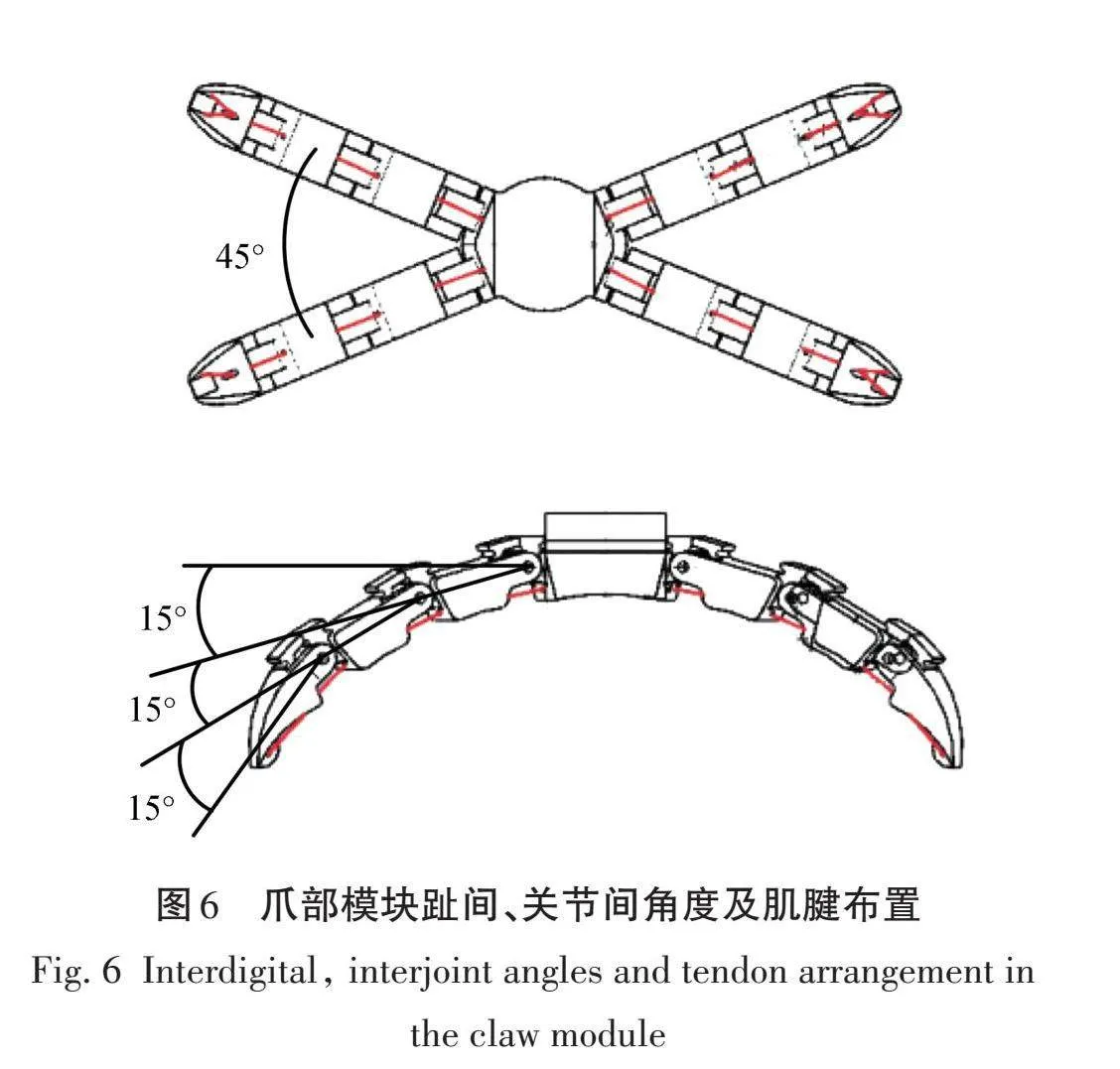
由于牡丹鹦鹉体积相较于无人机小,因此未按照鹦鹉腿足参数1∶1比例设计本机构。参考旋翼无人机质量及体积,最终通过仿生鸟腿足而设计的栖息机械臂如图3所示。
该仿生栖息机械臂结构由腿部模块、爪部模块和肌腱组成,旋翼无人机固定于机械臂上方。腿部模块从上至下分别由平台、驱动舵机、上平行连杆、下平行连杆和底座组成,其中,上、下平行连杆传动方式采用齿轮及铰接传动,其余部件连接方式均为铰接,并采用螺栓固定。舵机在腿部完全折叠后开启,牵引肌腱使爪部模块握紧栖息目标。平行连杆机构可以确保在运动中2个或多个点保持相对平行状态,一对平行连杆通过齿轮啮合传动可以起到控制折叠角度的作用,并保证在腿部模块折叠过程中平台与底座始终保持平行状态。齿轮一侧固定有短杆,上置滑轮,在腿部模块折叠过程中,上、下2个滑轮产生相对位移。
腿部模块中,肌腱的布置如图4所示,图4中红色线为肌腱,其一端固定于舵机输出轴,于平台定位孔穿过,依次通过上、下滑轮,穿过底座定位孔,末端固定连接于爪部牵引肌腱。
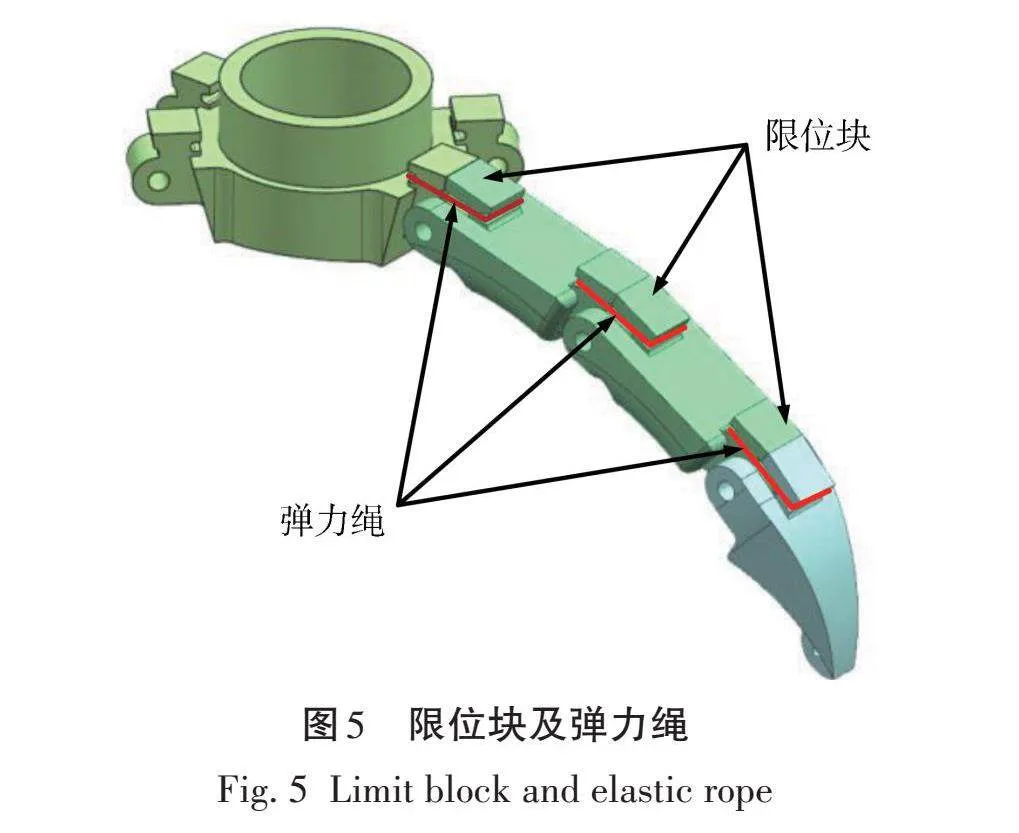
爪部模块作为末端执行器,起到最终抓握作用,其对称布置于腿部模块下方,爪座通过嵌套的方式嵌套在腿部模块中的底座上。单一爪部模块包括1个爪座以及4根趾,每根趾包括2根趾骨以及1根趾尖。单根趾各部件的连接以及趾与爪座的连接均为铰接并且采用螺栓固定,所有连接均设置限位块,防止趾部反向运动,限位块上设沟槽,嵌套弹力绳,借此在肌腱放松时,爪部模块可以恢复初始状态,如图5所示。
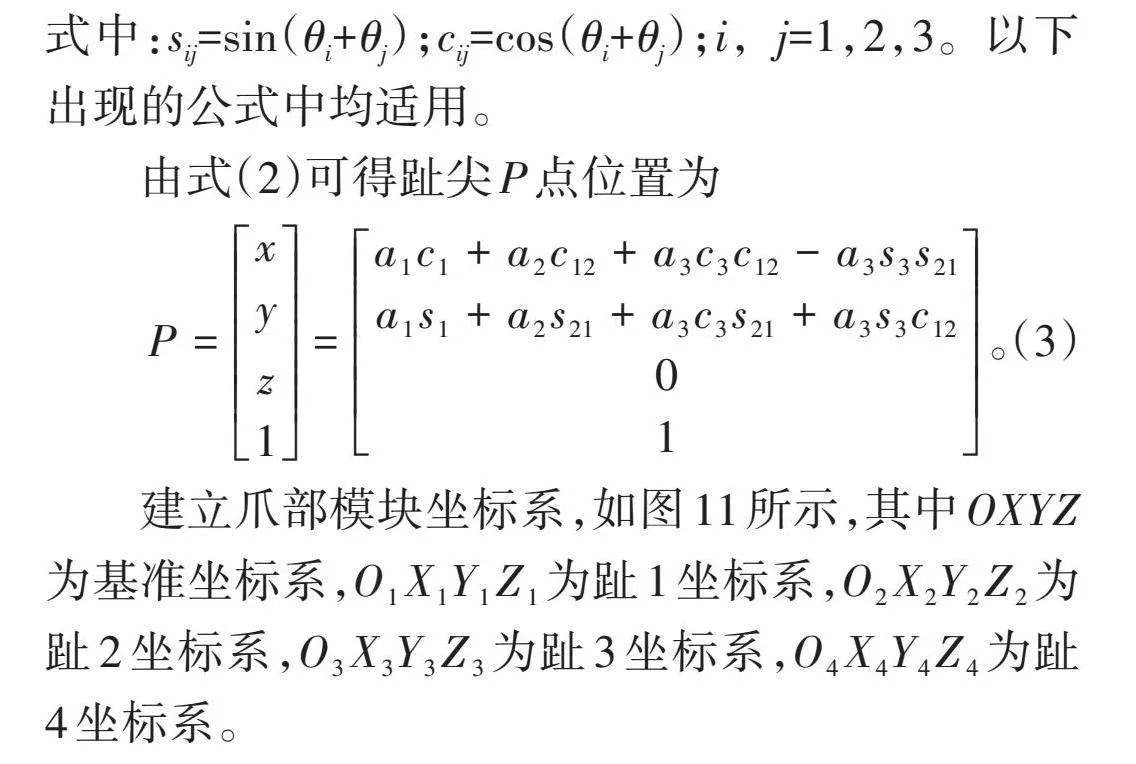
由图6可知,爪部模块中趾骨根据牡丹鹦鹉爪型采用对趾型,同侧趾呈45°角布置。限位块使每个零件间的初始角均为15°。预设角使整机对同一目标栖息时候肌腱拉紧行程小于未设预设角度时的行程,有助于快速栖息。肌腱对称布置,红色线为肌腱布置位置,一端系于趾尖尖端孔,穿过趾骨下方孔道,爪座内部孔道,以及对称趾的孔道,末端系于对称趾尖端孔。4根趾骨布置2根肌腱,2根肌腱交叉于爪座内部中心线。
2 仿生栖息机械臂运动学分析
在旋翼无人机栖息中,主要包含2个过程(降落,起飞)。整机的姿态由机械臂转动关节决定,因此需要对机械臂的栖息运动进行运动学建模,并进行相关运动学分析。
2.1 仿生机械臂栖息姿态分析
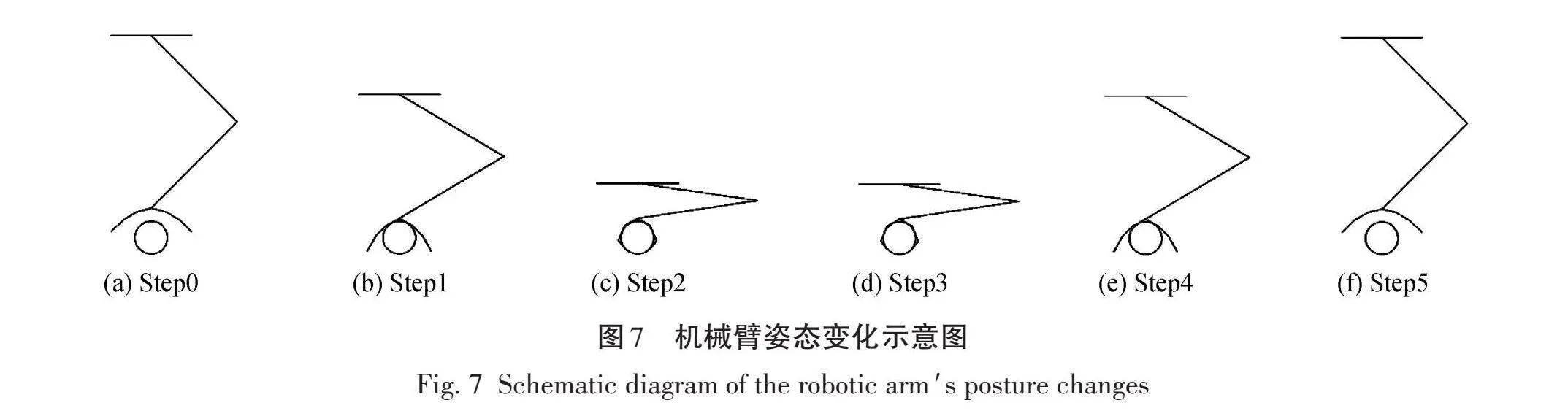
仿生机械臂进行栖息行为时,在不同时刻具有不同的姿态。在运动学分析前,需要对栖息行为发生时仿生机械臂的栖息动作进行分析。腿部模块为平行连杆,在运动示意图中简化为单连杆,机械臂姿态变化如图7所示。
图7(a)—图7(c)是机械臂在目标杆上降落过程示意图。
Step0:机械臂悬停于目标上方,调整方位,爪部模块悬于栖息目标杆正上方。此时机械臂无任何动作。
Step1:整机缓慢降落,爪部模块与栖息目标杆接触,利用整机自身质量,致使腿部模块折叠,腿部模块关节处的滑轮相对位移使肌腱张紧,使爪部模块初步抓握目标杆件。
Step2:当腿部模块停止折叠时,舵机正转介入肌腱的牵引,使爪部模块握紧目标杆,完成降落。
图7(d)—图7(f)是机械臂在目标杆上起飞过程示意图。
Step3:舵机停机,旋翼无人机开始提升升力。
Step4:旋翼无人机上升,升力的增加平衡了整机自身重量,腿部模块反向折叠,使肌腱松弛,爪部模块限位块上的弹力绳使趾还原初始状态,趾离开目标杆。
Step5:旋翼无人机持续上升,舵机反转,腿足受自身质量影响,持续打开,爪部模块完全离开栖息目标,完成起飞。
仿生栖息机械臂作为旋翼无人机负载使用,而且在栖息过程中保持整机平衡尤为重要,因此栖息姿态设计应遵循尽量简化动作的原则。降落过程(Step0,Step1,Step2)中,整机设计栖息姿态使平台始终保持水平,整机重心始终在栖息目标上方,此过程腿部模块折叠平台稳定下降,当折叠结束主动驱动介入抓握运动,分步抓握过程有助于简化运动,减小多因素干扰降落过程。起飞过程(Step3,Step4,Step5)中,首先提升无人机拉力,可以避免无动力下打开爪部致使整机掉落。腿部折叠对肌腱牵引位移大于舵机,因此先进行腿部反向折叠使爪部模块快速完全打开,使爪部对整机飞离目标无影响,完全脱离后再舵机反转完全放松肌腱,等待下一次栖息。
2.2 腿部模块运动学仿真
运动学建模与分析是实现机械臂运动控制的基础,由于腿部模块运动简单,因此通过机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems,ADAMS)运动学仿真对腿部模块进行分析。
腿部模块在降落时是一个单自由度结构,3个关节均为转动副。仿生栖息机械臂机构在降落过程中,在Step1受重力影响,Step2舵机加入系统继续收紧肌腱。由于Step2腿部模块相对静止,因此只对栖息Step1进行仿真验证腿部模块运动效果。建立腿部模块模型,并对腿部模块进行简化,在只考虑重力作为动力的情况下,不加载舵机、肌腱等零件,只对单腿进行仿真。将简化后的腿部模块模型导入Adams软件进行运动学仿真分析。
Time设定为0.18 s,腿部模块的运动轨迹如图8所示。图8中展示了腿部模块运动轨迹,以及在运动过程中平台、上下滑轮质心的轨迹线。
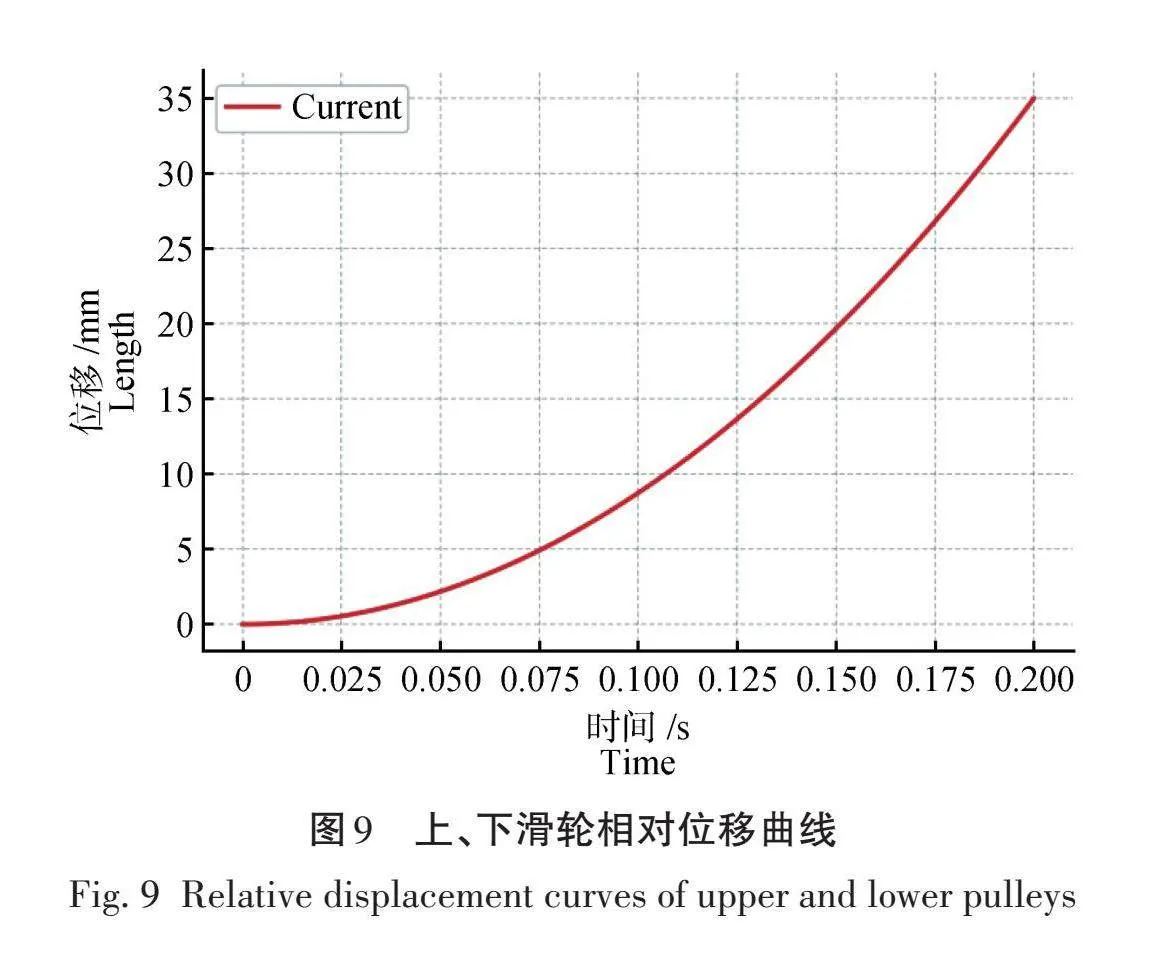
通过对上、下滑轮的质心进行测量,得到腿部模块运动过程中,2个滑轮相对位移曲线如图9所示。
由图9可知,滑轮相对位移随时间增加而递增,曲线随着时间轴的递增斜率增大,表明位移随时间的增长是非线性的,两滑轮相对位移速度受腿部模块折叠的重力加速度影响。曲线平滑表示在运动中并未产生激变,证明腿部模块的运动稳定。上、下滑轮质心的相对位移映射肌腱被牵引的长度大致为 35 mm,由此可得经过腿部模块Step1的运动,腿部折叠,肌腱被拉动的距离最大约为35 mm,仿真结果与Siemens NX建模设计相近,腿部模块肌腱的牵引位移导致爪部模块的肌腱被向上牵引,致使爪部模块初步抓握目标,产生较小的抓握力,抓握力的大小完全取决于腿部模块在重力的影响下产生的下压力。
2.3 爪部模块运动学分析
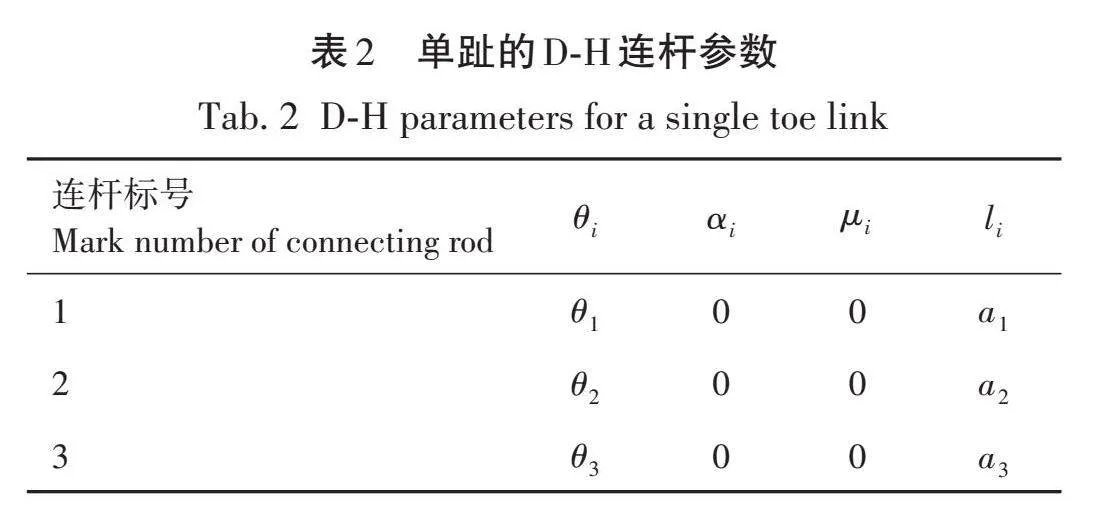
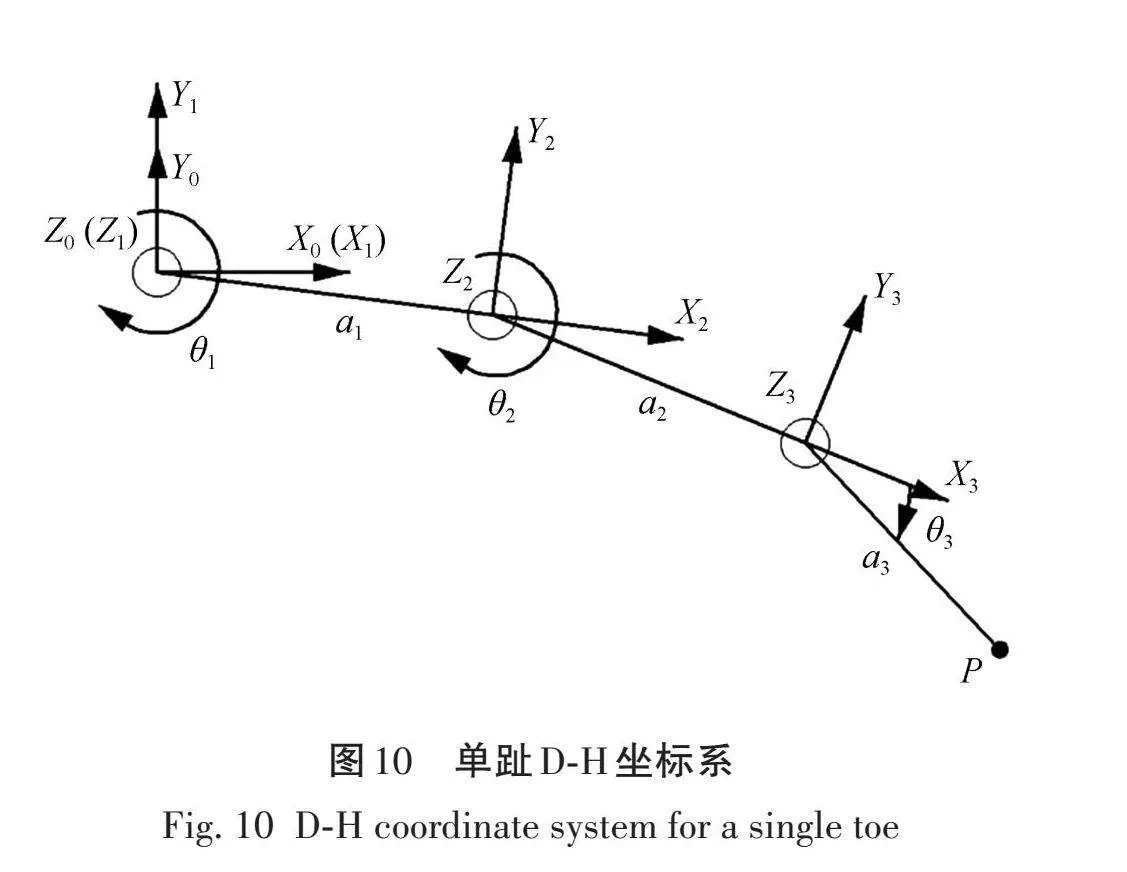
爪部模块相较于腿部运动复杂,因此采用经典的D-H(Denavit-Hartenberg)参数法进行分析[14-15]。单趾所有运动副均为转动副,其D-H坐标系如图10所示。D-H坐标系中,αi为zi-1轴围绕着xi轴旋转所转过且使zi-1轴平行于zi轴的连杆旋转角;θi为xi-1轴围绕着zi-1轴旋转且使xi-1轴平行于xi轴的关节角。爪部模块单趾的D-H连杆参数见表2,表2中,li为zi-1轴与zi轴之间公法线的连杆长度;μi为沿着zi-1轴方向、xi-1轴与xi轴的轴关节距离。
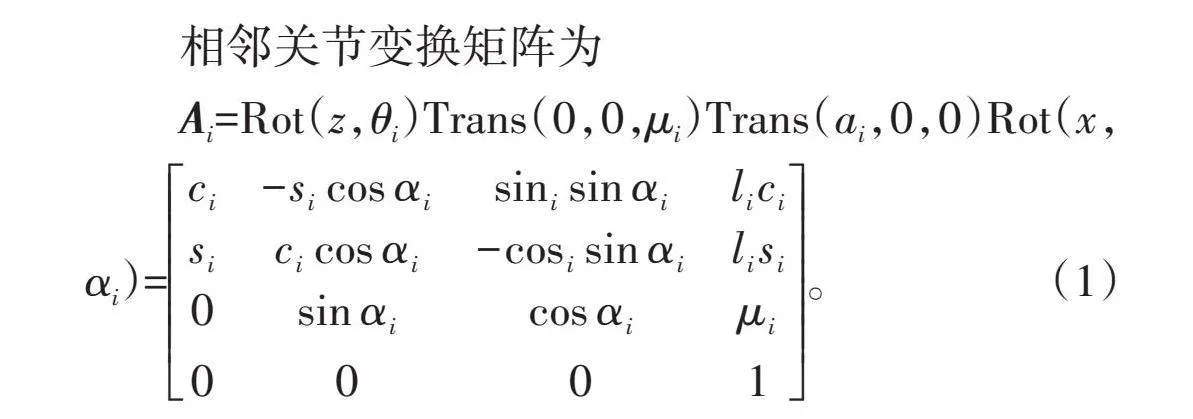
相邻关节变换矩阵为
Ai=Rot(z,θi)Trans(0,0,μi)Trans(ai,0,0)Rot(x,αi)=[(c_i&-s_i cosα_i&sin_i sinα_i&l_i c_i@s_i&c_i cosα_i&-cos_i sinα_i&l_i s_i@0&sinα_i&cosα_i&μ_i@0&0&0&1)]。 (1)
式中:si=sinθi;ci=cosθi。
将表2中各参数带入到式(1),即得到A_1,A_2,A_3变换矩阵。
趾尖末端坐标系相对坐标系X_0 、Y_0 、Z_0的变换矩阵为
A_3^0=A_1⋅A_2⋅A_3=[(c_3 c_12-s_3 s_21&-c_3 s_21-s_3 c_12&0&a_1 c_1+a_2 c_12+a_3 c_3 c_12-a_3 s_3 s_21@c_3 s_21+s_3 c_12&c_3 c_12-s_3 s_21&0&a_1 s_1+a_2 s_21+a_3 c_3 s_21+a_3 s_3 c_12@0&0&1&0@0&0&0&1)]。 (2)
式中:sij=sin(θi+θj);cij=cos(θi+θj);i, j=1,2,3。以下出现的公式中均适用。
由式(2)可得趾尖P点位置为
P=[(x@y@z@1)]=[(a_1 c_1+a_2 c_12+a_3 c_3 c_12-a_3 s_3 s_21@a_1 s_1+a_2 s_21+a_3 c_3 s_21+a_3 s_3 c_12@0@1)] 。(3)
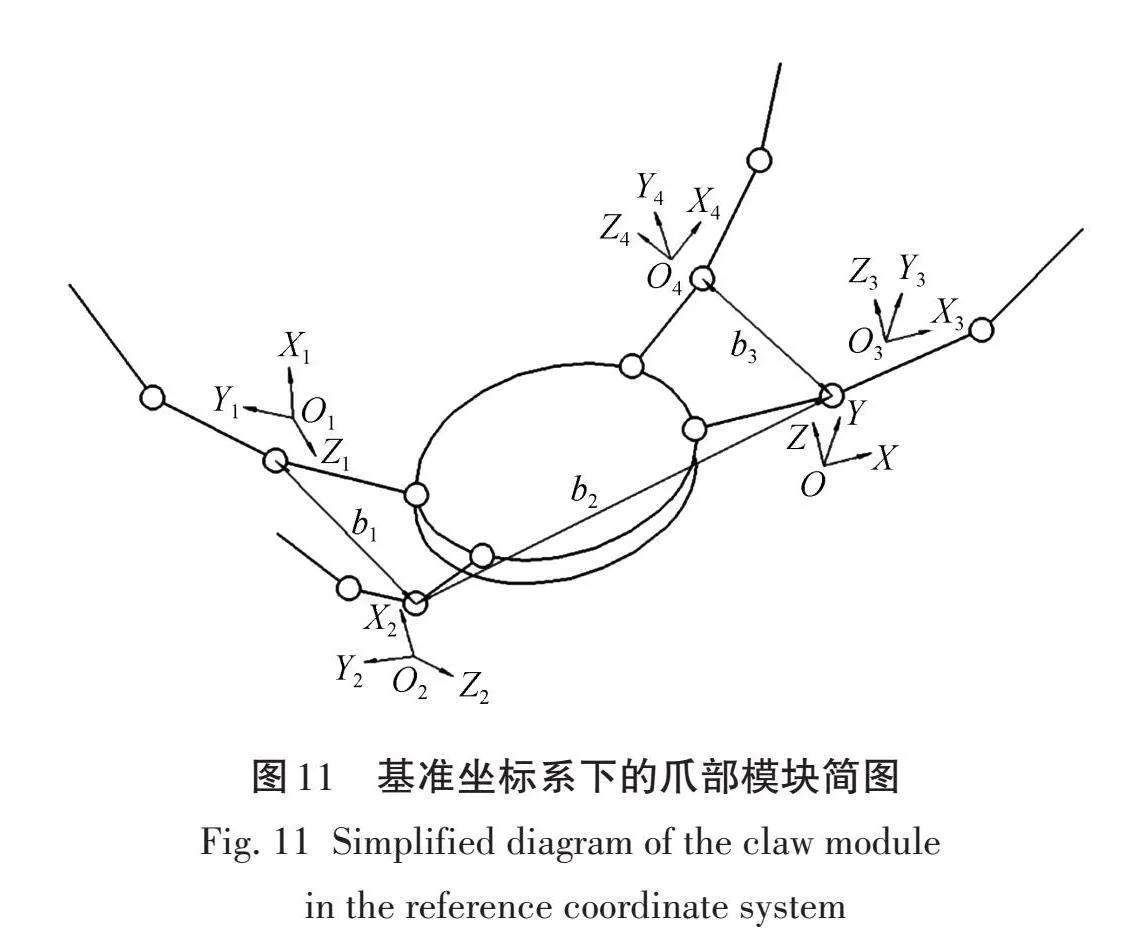
建立爪部模块坐标系,如图11所示,其中OXYZ为基准坐标系,O_1 X_1 Y_1 Z_1为趾1坐标系,O_2 X_2 Y_2 Z_2为趾2坐标系,O_3 X_3 Y_3 Z_3为趾3坐标系,O_4 X_4 Y_4 Z_4为趾4坐标系。
图11中,b_1为趾1坐标系原点与趾2坐标系原点的距离;b_2为趾2坐标系原点与趾3坐标系原点的距离;b_3为趾3坐标系原点与趾4坐标系原点的距离。a_11,a_12,a_13、a_22,a_22,a_23、a_31,a_32,a_33和a_41,a_42,a_43分别为趾1、趾2、趾3、趾4的由近端到远端的趾节长度。趾尖坐标(_^O) P=[x_i,y_i,z_i,1]可以通过坐标变换实现,见式(4)
(_^O) P=(_O_i^O)T (_^(O_i))P。 (4)
式中:(_^O) P为指尖在整体坐标系OXYZ下的位置矢量;(_O_i^O) T为O_i X_i Y_i Z_i相对于OXYZ坐标下的齐次变换矩阵;(_^(O_i)) P为指尖在O_i X_i Y_i Z_i坐标系下的位置矢量。
由趾1坐标系O_1 X_1 Y_1 Z_1与基准坐标系OXYZ的关系可知,须进行如下的坐标系变换。将基准坐标系沿x轴平移距离b_2,沿z轴平移距离b_1,绕y轴旋转γ_1使基准坐标系z轴与z_1轴重合,绕z轴旋转β_1使基准坐标系y轴与y_1轴重合。
故变换矩阵为
(_O_1^O) T=Trans(b_2,0,b_1 )Rot(y,γ_1)Rot(z,β_1)。 (5)
趾1趾尖在基准坐标系OXYZ中的位置为
(_^O) P_1=T(_^(O_1))P=[(p_1x@p_1y@p_1z@1)]。 (6)
同理可得趾2、趾3、趾4在基准坐标系下的趾尖位置[16]。
2.4 爪部模块工作空间仿真分析
求取爪部模块趾尖工作空间是测验爪部模块是否满足多趾运动空间需求以及评价其工作性能的重要指标之一。单根趾工作空间受关节活动范围以及趾骨长度影响,由机构中各转动副相互配合后,转动副自身所能达到的最大工作范围相互制约形成。本研究采用了一种基于随机采样的方法来求解机器人工作空间,通过随机生成一系列关节角度,然后使用正向运动学(fkine函数)计算对应的末端执行器位置,从而获得机器人的工作空间分布。在某种程度上类似于蒙特卡罗方法,通过大量随机样本来估计或近似某个量的分布。
具体步骤如下。
初始化:设定每个关节角度的最小值和最大值。
随机采样:对于每个关节,随机生成一个在其运动范围内的角度值。
正向运动学:使用机器人的正向运动学模型(Robot1. fkine函数),根据这些随机生成的关节角度计算末端执行器的位置。
记录位置:将计算得到的末端执行器位置(x,y,z坐标)记录下来。
重复过程:重复上述过程多次(2 000次),获得大量的末端执行器位置数据。
可视化:使用plot3函数在三维空间中绘制所有计算得到的末端执行器位置点,从而可视化出机器人的工作空间。
爪部模块各趾骨、趾尖骨节长度和关节活动范围具体参数见表3。
在MATLAB中得到爪部模块趾尖工作空间的点云分布情况,如图12所示。空间上,每根趾的趾尖运动点云呈平面式分布,越往远端越密集,在爪部模块上考虑到趾节上仅有3个转动副,并且由于爪部模块为绳驱动,趾的运动不会是固定单一的运动轨迹,根据不同形状的目标抓握物可以自适应目标形状完成包络抓握,因此符合空间点云的情况。x-y平面的工作空间呈现出一个交叉,在爪部模块考虑生物学上掌趾关节运动到极限位置时,韧带处于张紧状态,此时关节达到弯折极限,符合工作空间点云图情况。
对于鸟类爪部作用来说,大致分为3种状态,栖息时的抓握树枝等类圆杆物体;平地移动跳跃;抓握抓取不同形状的物体。大多时刻是以抓握 形式使用,握紧时使用了所有的趾,各种形式的抓握都可以依据对力或精确度的需求来进一步划分。
爪部模块的抓握功能与鸟爪抓握功能相似,两者应当具有相似的工作空间。根据趾尖工作空间仿真结果,爪部模块的工作空间与鸟爪的实际工作空间相吻合,满足仿生栖息机械臂仿生程度高的需求。
3 试验研究
前文已经完成了仿生栖息机械臂的设计以及运动学分析仿真,还需要对所设计的仿生栖息机械臂进行加工制造、装配,检验其栖息能力,对爪部模块栖息抓取目标的能力进行相关试验,来验证所设计机械臂是否具有良好的性能。
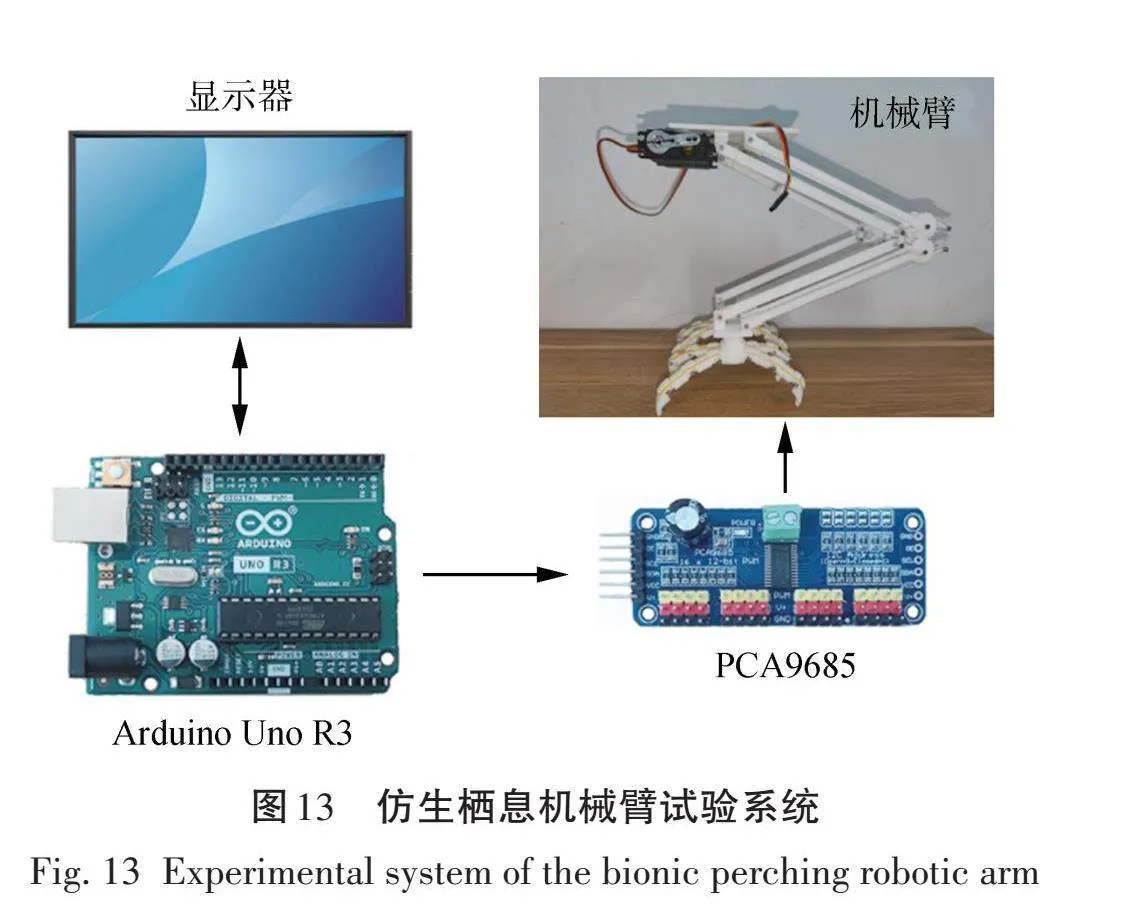
3.1 试验系统的搭建
由图13可知,试验系统主要由显示器、Arduino Uno R3、PCA9685舵机驱动器以及仿生栖息机械臂(包含2组舵机)组成。
Arduino Uno R3是一个基于ATmega328P微控制器的流行开源微控制器板,是电子和DIY项目中的一个关键工具,广泛被爱好者、教育工作者和专业人士用于创建交互式项目和原型。
PCA9685是一个16通道12位I2C总线PWM控制器,其广泛用于LED灯光和伺服电机的控制。PCA9685由NXP半导体公司开发,能够通过IIC总线与微控制器(如Arduino、Raspberry Pi等)通信,实现对多个PWM输出的精确控制。
仿生栖息机械臂由爪部模块以及腿部模块组成,腿部模块在平台下方固定有2只舵机,舵机输出摇臂连接肌腱。爪部模块由4根趾铰接在爪座四周,肌腱十字交叉贯穿爪部模块通孔并打结固定。爪部模块肌腱交叉点连接腿部模块肌腱一端,爪座插入腿部模块底座。机械臂的组成零件中,铰接处连接零件选用铝合金材质M2螺栓,既可以减轻重量又坚固可靠。腿部爪部模块各杆件通过3D打印制作完成,使用高强度光敏树脂。最终制作的仿生栖息机械臂总质量是275 g。
爪部模块在前面内容中进行了着重设计、分析,在此试验章节单独验证爪部模块的性能十分必要。此部分对爪部模块趾的屈/伸进行试验验证关节角范围与设计是否相符。
3.2 爪部模块趾屈/伸试验
爪部模块是机械臂的执行终端,是栖息过程最重要的一环。趾屈/伸试验为验证爪部模块趾的关节屈/伸运动范围与建模设计是否一致。
为爪部模块趾屈/伸运动试验如图14所示,图14(1)为爪部模块各个关节初始角,图14(2—4)分别为远端关节、中间关节以及近端关节的屈/伸运动角度范围,其运动极限角度与在建模设计的结果一致。此试验证明爪部模块趾的最大运动范围满足设计要求。
3.3 机械臂栖息试验
机械臂栖息试验是在没有旋翼无人机的情况下仅对机械臂的栖息性能进行实际考量。将爪部模块与腿部模块进行装配并且安装舵机以及肌腱,将舵机排线连接到PCA9685扩展模块,舵机操控程序上传到Arduino Uno R3,连接通讯线,完成整机装配。进行机械臂垂直栖息试验与机械臂倾斜试验。
1)机械臂垂直栖息试验
机械臂垂直于栖息目标(直径40 mm的树枝)进行降落,腿部模块折叠牵引肌腱致使爪部模块对栖息目标进行预抓握,舵机转动,持续牵引肌腱,使爪部模块抓紧栖息目标,完成降落过程。试验过程如图15所示。
试验阶段,机械臂整机降落过程与Step(0,1,2,3)阶段预设的降落过程栖息姿态完全一致,最终整机抓紧栖息目标完成降落。
2)机械臂倾斜试验
在栖息过程中,由于侧风、湿滑、无人机操作失误等因素,可能导致最终无人机未能按照设想垂直降落。本试验通过对树枝角度调整,测试当整机大角度降落时,是否依然能保持整体平衡,完成降落,不会跌落。试验结果如图16所示。
由图16可知,当机械臂整机前后有30°倾斜时,依然能保持平衡,不致掉落。由此可见设计抓握力足够。
4 结论
为解决林用无人机定点观测问题,本研究基于鸟类解剖学的研究,设计了一种绳驱动的仿生栖息机械臂。
1)分析和研究鸟类腿部的解剖学特征,设计了基于鸟类腿部解剖学特征的绳驱动仿生栖息机械臂。以牡丹鹦鹉腿足结构为蓝本,进行了结构设计。
2)进行分模块的运动学分析,使用Adams软件对腿部模块进行运动学仿真,获得腿部模块的运动轨迹和滑轮相对位移曲线,腿部在重力作用下在0.18 s内完成折叠,并可以稳定运动。通过D-H参数法对单趾进行了运动学分析。对单趾运动方程进行了位姿变换,得到多趾趾尖的运动学方程。使用MATLAB对欠驱动爪部模块的工作空间进行了仿真,获得了趾尖工作空间的点云分布。
3)基于分析结果制造了仿生栖息机械臂的试验样机,并进行了趾的屈/伸运动试验,验证趾运动范围与设计相符。进行了40 mm树枝的垂直栖息试验,验证了机械臂能够在降落过程中保持预设姿态,实现栖息。进行了倾斜试验,结果显示机械臂抓握力足够,在机身最大倾斜30°的情况下也能保证平衡。
综上所述,研究证明了仿生栖息机械臂能够有效地完成树枝上的栖息任务,展现了良好的应用潜力。
【参 考 文 献】
[1] 李龙锋.无人机在林业资源调查与监测中的应用研究[J].农业科技与信息,2023(4):21-23.
LI L F.Research on the application of unmanned aerial vehicle(UAV) in forestry resources investigation and monitoring[J].Agricultural Science-Technology and Information,2023(4):21-23
[2] 张良阳,李占科,韩海洋.微型无人机栖息设计技术综述[J/OL].航空学报:1-27[2023-07-12].
ZHANG L Y,LI Z K,HAN H Y.A review of perching technology of micro-UAV[J/OL].Acta Aeronautica et Astronautica Sinica:1-27[2023-07-12].
[3] CULLER E,THOMAS G,LEE C.A perching landing gear for a quadcopter[C]//53rd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference 20th AIAA/ASME/AHS Adaptive Structures Conference 14th AIAA.2012: 1722.
[4] DOYLE C E,BIRD J J,ISOM T A,et al.An avian-inspired passive mechanism for quadrotor perching[J].IEEE/ASME Transactions On Mechatronics,2012,18(2):506-517.
[5] XIE P,MA O,ZHAO Z,et al.A bio-inspired UAV leg-foot mechanism for landing,grasping and perching tasks[C]//AIAA Atmospheric Flight Mechanics Conference.2015:1689.
[6] RODERICK W R T,CUTKOSKY M R,LENTINK D.Bird-inspired dynamic grasping and perching in arboreal environments[J].Science Robotics,2021,6(61):eabj7562.
[7] DOYLE,C E,BIRD J J,ISOM T A,et al.Avian-inspired passive perching mechanism for robotic rotorcraft[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEE,2011:4975-4980.
[8] NADAN P M,LEE C L.Computational design of a bird-inspired perching landing gear mechanism[C]//ASME International Mechanical Engineering Congress and Exposition.American Society of Mechanical Engineers,2018,52033:V04AT06A018.
[9] BAI L,WANG H,CHEN X,et al.Design and experiment of a deformable bird-inspired UAV perching mechanism[J].Journal of Bionic Engineering,2021,18(6):1304-1316.
[10] ZHU Y,HE X,ZHANG P,et al.PerchTzIL5eNOQEaobdq2e3qrr2drCLuQrcG9Qrm9JRFRQMs=ing and grasping mechanism inspired by a bird′s claw[J].Machines,2022,10(8):656.
[11] 何秀敏,张溪万,张楚,等.飞行器新型仿鸟抓取结构的设计与分析[J].江苏工程职业技术学院学报,2023,23(1):16-19.
HE X M,ZHANG X W,ZHANG C,et al.Design of a new-type bird-like grabbing structure for aircraft[J].Journal of Jiangsu College of Engineering and Technology,2023,23(1):16-19.
[12] PROCTOR N S,LYNCH P J.Manual of ornithology:Avian structure & function[M].New Haven,Connecticut:Yale University Press,1993.
[13] BOCK W J,MILLER W D W.The scansorial foot of the woodpeckers,with comments on the evolution of perching and climbing feet in birds[M].New York:American Museum of Natural History,1959.
[14] 党群.柔性腿四足机器人结构设计与步态仿真[D].大庆:东北石油大学,2020.
DANG Q.Structural design and gait simulation of flexible leg quadruped robot[D].Daqing:Northeast Petroleum University,2020.
[15] 李鹏飞.四足机器人结构设计与运动学仿真分析[D].昆明:昆明理工大学,2020.
LI P F.Structural design and kinematic simulation analysis of quadruped robot[D].Kunming:Kunming University of Science and Technology,2020.
[16] 张吉.高仿真拟人机械手指关节结构设计与运动学分析[D].天津:中国民航大学,2021.
ZHANG J.Design and kinematic analysis of finger joint structure of high-fidelity anthropomorphic machinery[D].Tianjin:Civil Aviation University of China,2021.