
基于Arduino的多功能循迹小车设计
2024-10-10 00:00王长乐魏雄飞王静高宇陈洪亮常曼莉
河南科技 2024年17期
摘 要:【目的】针对传统循迹小车存在反应速度慢、判断不准确、定位精度低、扩展性差、灵活性不足等问题,设计了一款基于Arduino的多功能循迹小车。【方法】借助光电传感器实现移动检测,结合摄像头、物联网、触摸屏等模块,设计出基于Arduino的物联网模块多功能循迹小车,并对其相关性能进行实物测试。【结果】测试结果表明,该小车不仅能够与终端建立通信,完成对周围环境的实时监控和数据采集,而且能够通过传感器控制行驶方向,实现在预设路径上自动行驶;还能够通过摄像头对图像进行采集与处理,并检测后上传至物联网终端。【结论】成功设计了一款兼容性更强的多功能循迹小车,适用于仓库物流、环境检测、巡检维护等多个领域,具有广阔的市场应用前景。
关键词:Arduino;多功能;循迹小车;无线控制
中图分类号:TP211.6 文献标志码:A 文章编号:1003-5168(2024)17-0014-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.17.003
Design Study of Arduino-Based Multifunctional Trajectory Trolley
WANG Changle1 WEI Xiongfei2 WANG Jing1 GAO Yu1 CHEN Hongliang1 CHANG Manli1
(1.Chaohu University, Hefei 238024, China; 2.Anhui Polytechnic University, Wuhu 241000, China)
Abstract: [Purposes] Aiming at the problems of slow reaction speed, inaccurate judgment, low positioning accuracy, poor expandability, and insufficient flexibility of traditional trajectory trolley, the design study of Arduino-based multifunctional trajectory trolley is proposed. [Methods] With the help of photoelectric sensors to realize motion detection and combining modules such as camera, IoT, touch screen, etc., an Arduino-based multifunctional trajectory trolley with IoT modules is designed and its related performance is tested physically. [Findings] The test results show that the trajectory trolley can not only establish communication with the terminal, but also complete real-time monitoring and data acquisition of the surrounding environment; moreover, the driving direction can be controlled by the sensor to realize automatic driving on the preset path ; it can also collect and process images through the camera, and upload them to the IoT terminal after detection. [Conclusions] In this study, a multifunctional trajectory trolley with stronger compatibility is designed, which is applicable to many fields such as warehouse logistics, environmental inspection, inspection and maintenance, and has a broad market prospect.
Keywords: Arduino; multifunction; tracking trolley; wireless control
0 引言
在现代工厂环境下,智能化生产是生产制造的研究重点。传统循迹小车(Traditional Trailing Trolley)的灵活度低、自由度小、扩展性差,已不能满足用户的使用需求。而具有麦克纳姆轮、摄像头模块、物联网模块的多功能循迹小车可以有效地解决上述问题。薛梁等[1]设计出一种基于Arduino的麦克纳姆轮智能车以实现全向移动;朱丹等[2]针对循迹小车在移动过程中跑偏的问题,借助光电传感器,改进了小车的循迹系统;齐曼等[3]为增加循迹小车在路程中的功能,利用摄像头设计出相应功能的算法;曾文琦[4]将循迹小车与物联网模块相结合,发挥出了循迹小车的数据传输和远程操控的作用;罗文杰等[5]遵循黑色循迹路线,使小车具备避障和语音播报功能;李金彦[6]利用多种传感器实现小车的自动寻迹、避障和控制前进、后退、左转、右转等功能。
相对于其他类似的研究,本研究主要通过搭载不同传感器模块,以实现多功能的集成化智能循迹小车的设计,从而应用于多个工程领域,如仓库物流、环境检测、巡检维护等。
1 整体设计
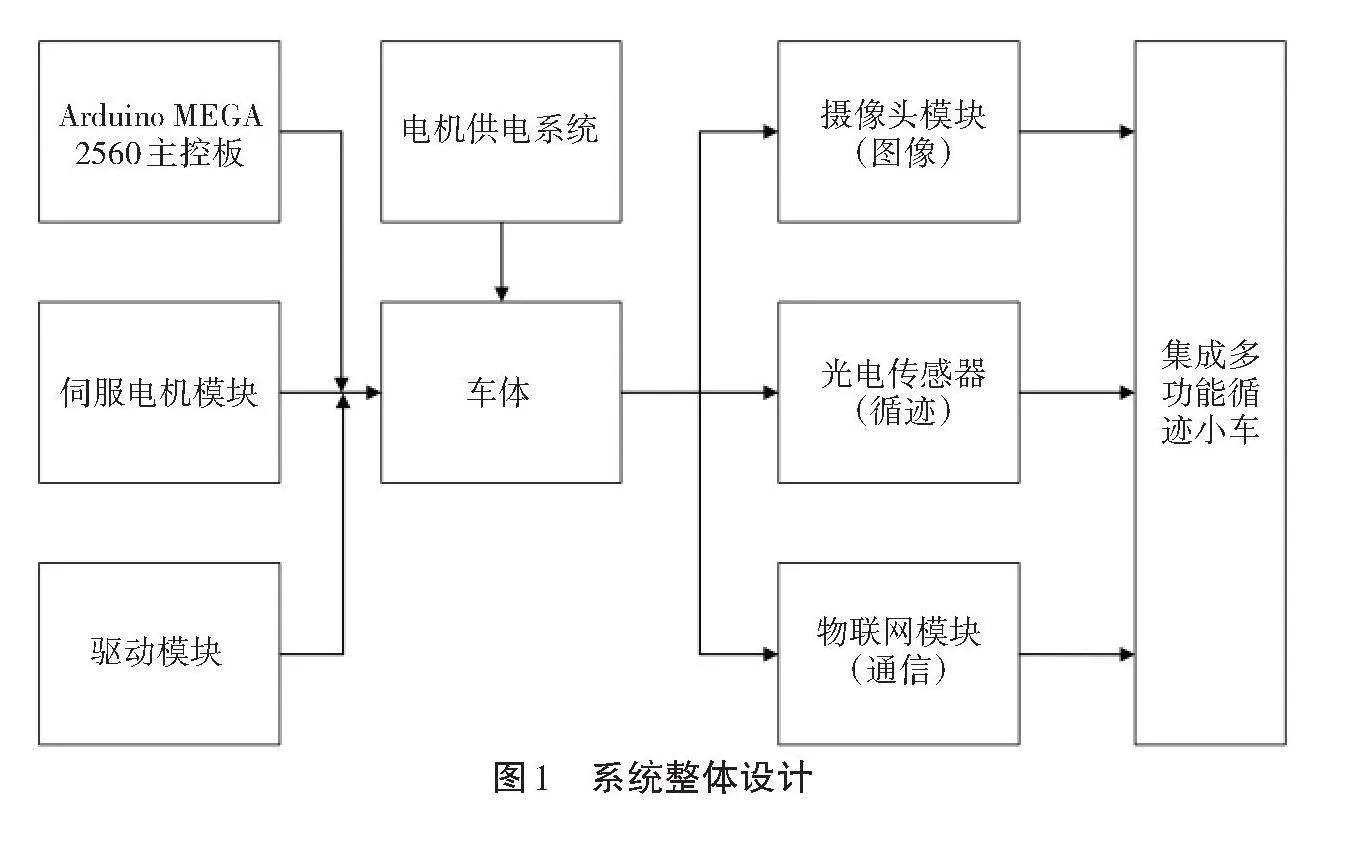
本研究设计的集成多功能循迹小车的系统采用Arduino Mega 2560作为主控板,实现对驱动模块、循迹模块、通信模块、图像模块及外围电路的控制。小车的路线以1cm宽的黑色胶带作为轨迹曲线,小车通过光电传感器将光强度的变换转换成电信号的变换,经控制器处理后,实现麦克纳姆轮沿预设的黑线前进,以执行后续的功能;小车进入物联网模块的唤醒模式时,会向物联网终端发送握手协议,使物联网终端从睡眠模式唤醒,与小车进行通信,通信完成后,启动物联网终端;小车摄像头通过检测路面上的物体,并将收集到的信息反馈给主控芯片,主控芯片对收集到的信息进行处理后,将处理结果发送给驱动模块,从而控制小车的运动状态。小车的系统整体设计如图1所示。主控制器主要用于对4个伺服电机的驱动和各种传感器信息处理,寻迹模块应用光电传感器完成,摄像头模块应用于小车图像识别,物联网模块主要用于智能小车的通信。
2 硬件设计
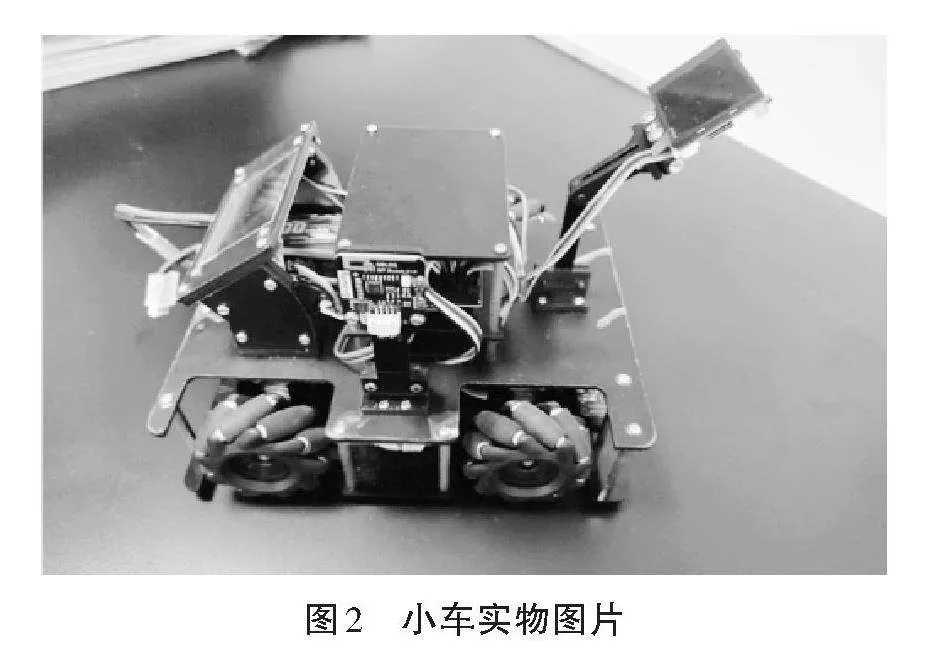
小车的整体结构尺寸为L×B×H=225 mm×200 mm×135 mm。根据小车的整体设计,需要为小车选择合适的硬件设备,主要包括车体框架、控制器、循迹模块、摄像头传感器、驱动模块、电机模块、电源模块、物联网模块、车轮的选择。小车的实物如图2所示。
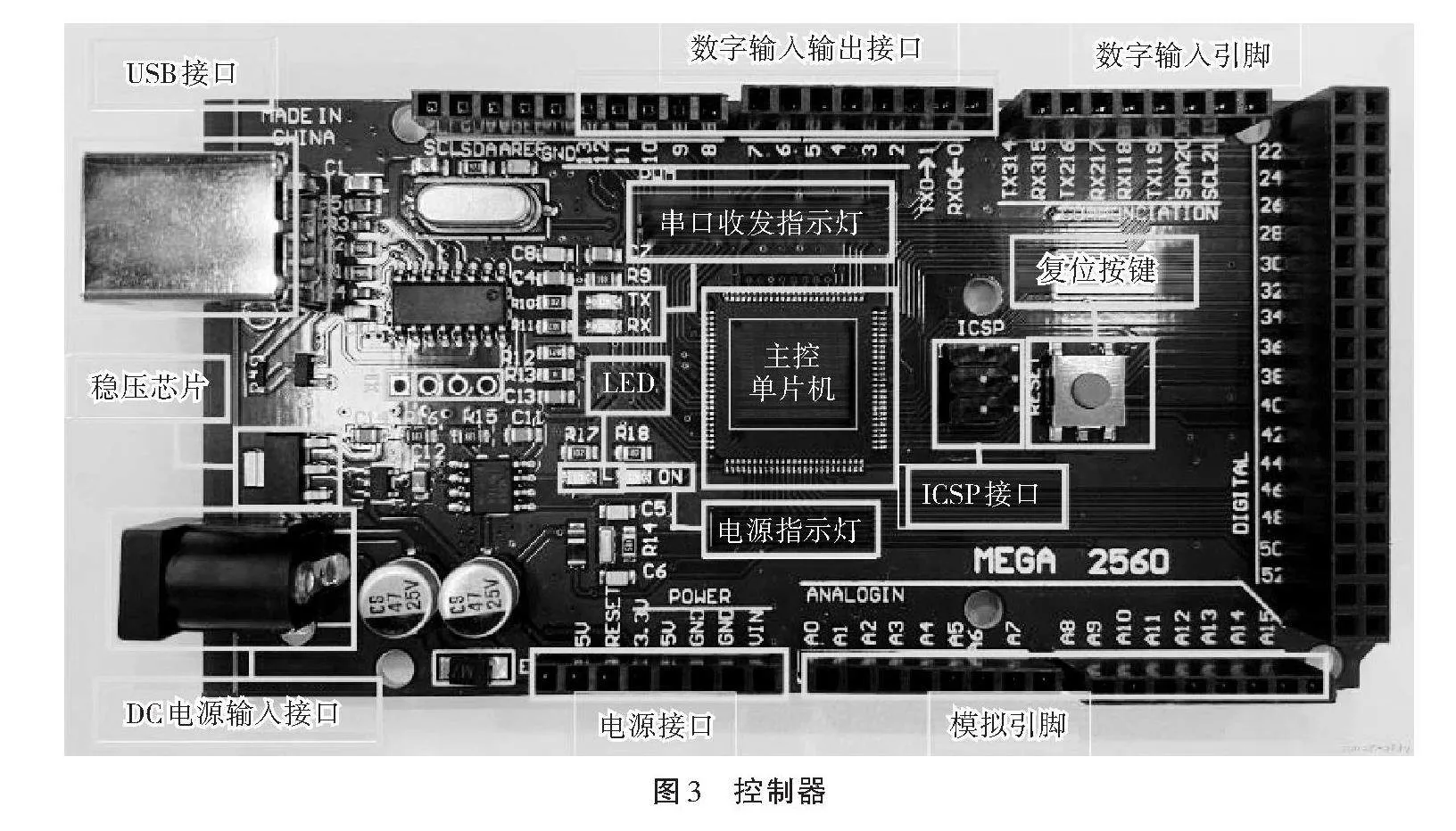
2.1 控制器的选择
该小车的控制器模块选用Arduino mega 2560控制器,其实物如图3所示。Arduino mega 2560控制器拥有更多的数字引脚和模拟引脚,适合处理需要大量传感器、执行器或其他外部设备的项目,支持多种拓展板(称为Shields),可以通过这些扩展板添加各种功能,如无线通信、显示屏、传感器等。由于拥有更高的性能,Arduino mega 2560 适用于开发大型、复杂的项目,如自动化系统、机器人、数据采集系统等,非常满足集成多功能循迹小车功能实现的需要。
2.2 循迹模块的选择
该小车的循迹模块选用7路光电传感器,其工作原理是将光强度的变换转换成电信号的变换,从而实现小车的移动。当光源发出光线时,光线经过光学元件在物体上反射或透射,部分光线被光接收器检测到,光接收器根据接收到的光线信号,通过电子元件将其转换成电信号,从而使小车在正确的轨道上运行。光电传感器如图4所示。
2.3 摄像头传感器的选择
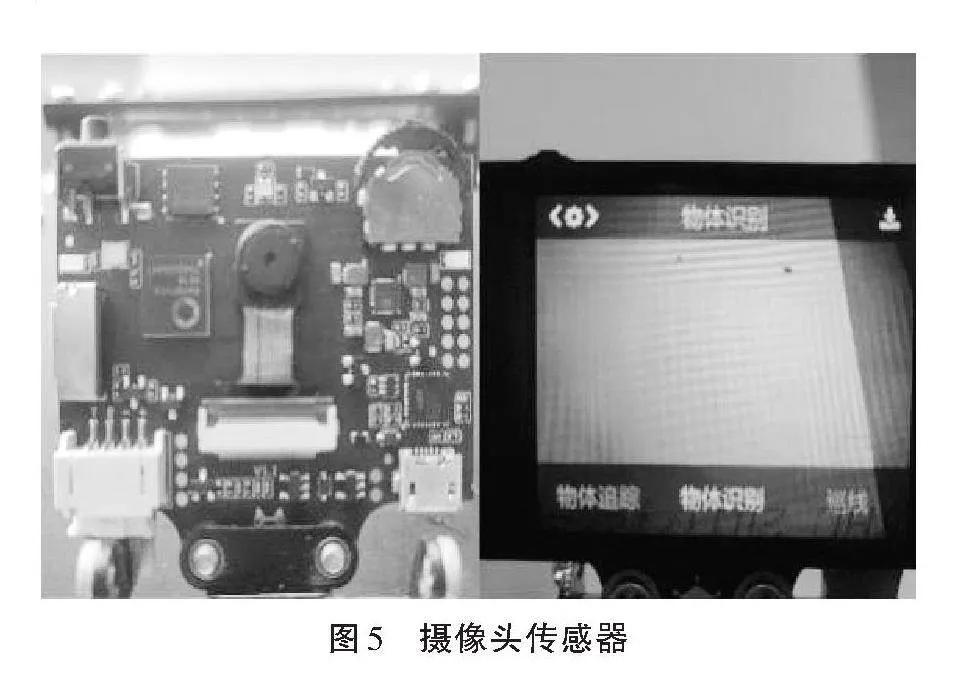
该小车的摄像头采用HuskyLens人工智能摄像头,该摄像头处理器为Kendryte K210, 内置7种功能:人脸识别、物体追踪、物体识别、巡循线追踪、颜色识别、标签识别、物体分类。板载UART / I2C接口,可以连接Arduino、LattePanda、micro:bit等主流控制器,实现硬件无缝对接,十分符合集成多功能循迹小车的拓展要求。摄像头传感器如图5所示。
2.4 物联网模块的选择
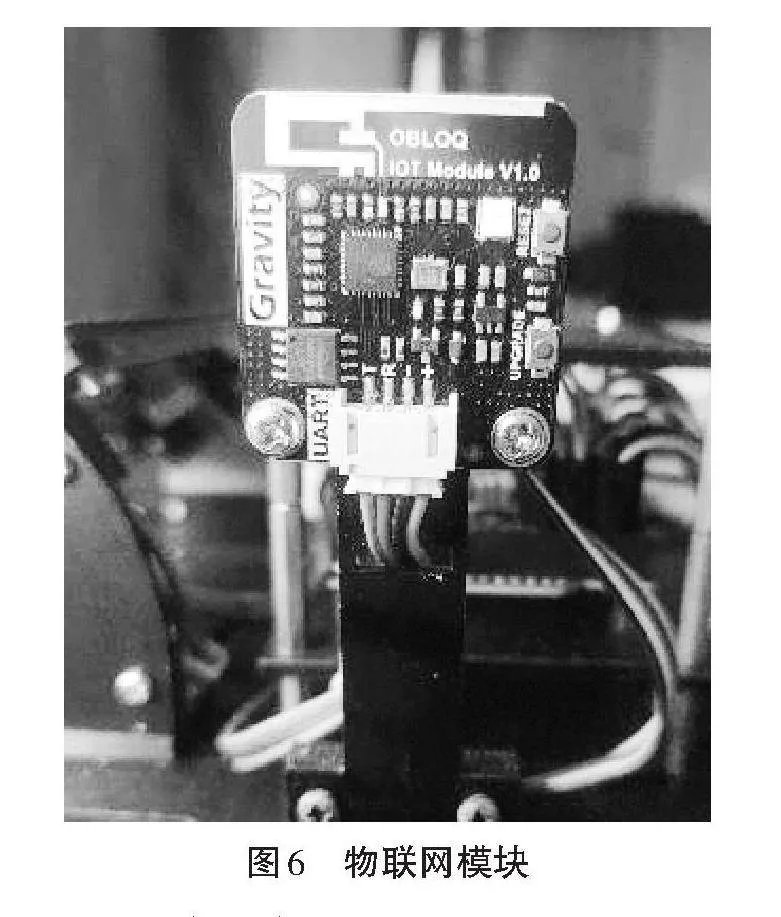
该小车的通信系统硬件选用Gravity:UART OBLOQ—loT物联网模块。物联网是将嵌入式系统技术、移动技术、网页技术全都融合在一起的,其发展的灵魂是以用户体验为核心,可以与硬件、网络、平台、服务等完全不同产业领域的相关者直接合作或者融合。目前,国内外已有多个成熟的物联网平台,但绝大部分物联网平台都是面向专业的开发人员,操作复杂、上手困难。而本研究使用的OBLOQ物联网模块,搭配DFRobot自有的物联网平台,大大降低了物联网的使用门槛,并且OBLOQ还能够连接 Microsoft Azure IoT和其他标准的MQTT协议的IoT,无须复杂的基础知识,就能迅速搭建出一套物联网应用。物联网模块如图6所示。
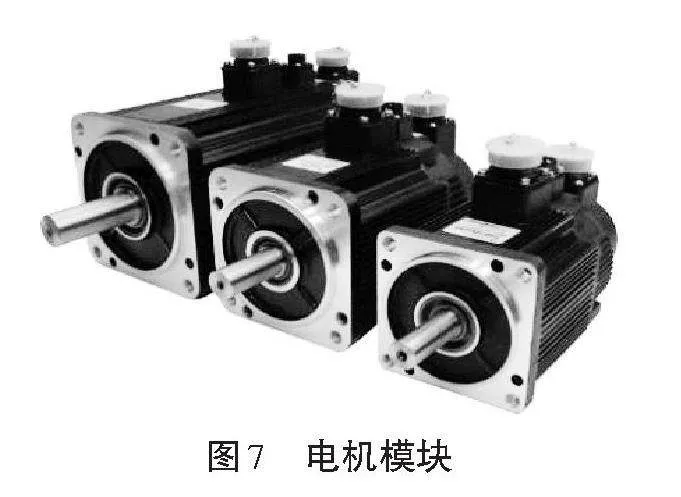
2.5 电机的选择
传统循迹小车的电机主要为步进电机或直流电机。但是直流电机换向比较困难、结构比较复杂、使用维护不方便;步进电机转速较小,却价格昂贵。考虑各种因素,该小车的电机模块选用伺服电机,以实现高精度的位置、速度和力矩的控制,具有较低的误差和较高的控制精度。伺服电机能够在较宽的速度范围内工作,从低速到高速都能保持较好的控制性能。电机模块如图7所示。
3 软件设计
该小车的软件设计与硬件设计相互对应,主要分为循迹程序、通信程序、图像识别程序等,以实现小车的正常功能。本研究主要使用C语言来编写程序及调试。
3.1 循迹程序
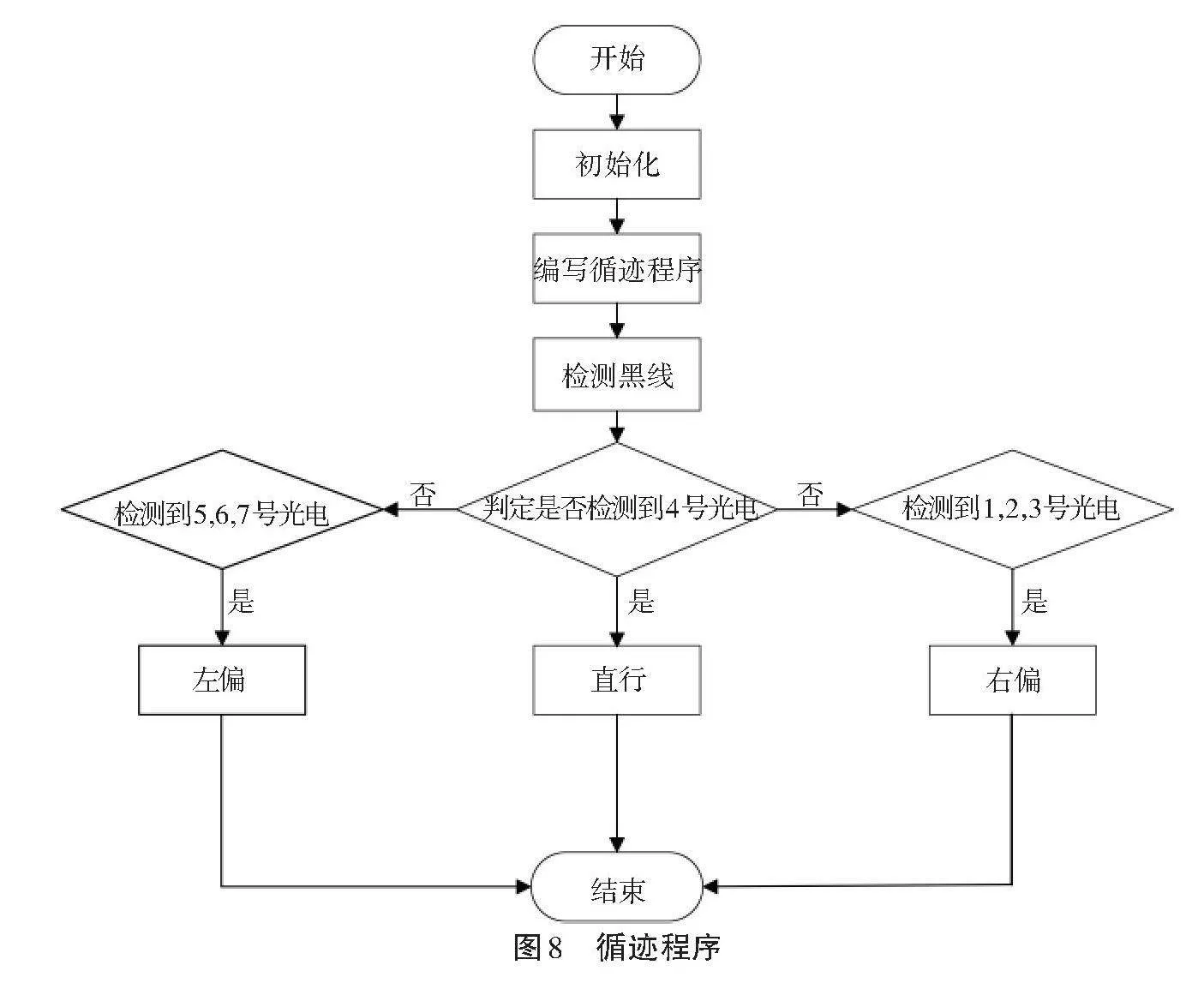
循迹程序用于实现小车的循迹功能。小车初始化后,光电传感器就开始检测路面上的黑线。小车光电传感器有7个光电,从左到右依次可以分为1、2、3、4、5、6、7。当4号光电检测到黑线时,小车直行;当1、2、3号光电检测到黑线时,小车往左转;当4、5、6号光电检测到黑线时,小车往右转;当小车没有检测到光电时,小车停止。麦克纳姆轮在转动的同时自动进行矫正。循迹程序框架如图8所示。
3.2 通信程序
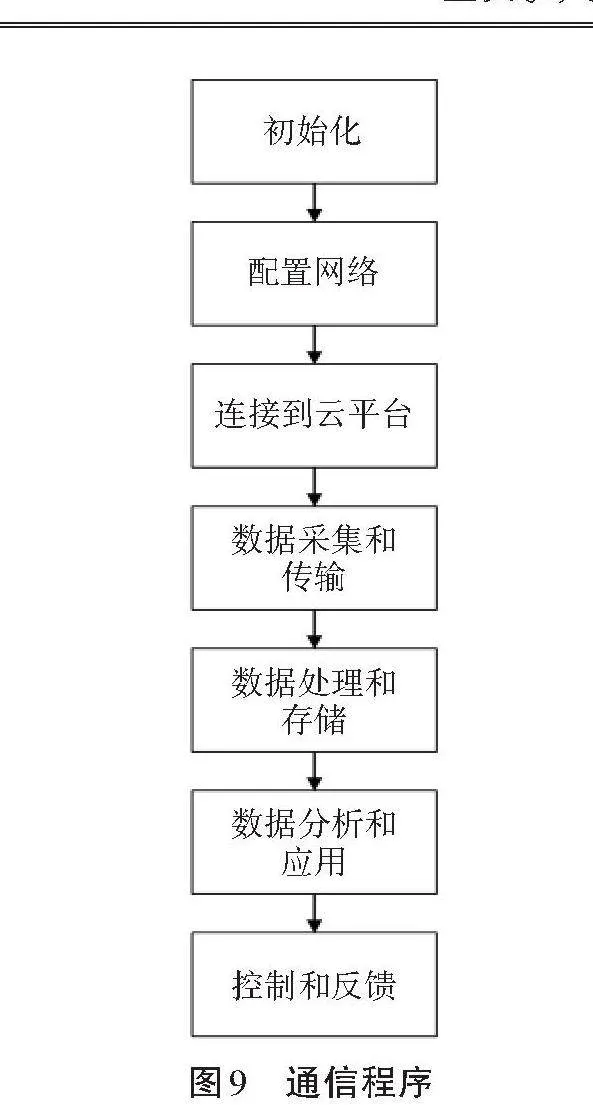
物联网模块与主控板连接后,打开模块上的电源开关供电。使用配置指令将物联网模块连接到所需的Wi-Fi网络。一旦成功连接到Wi-Fi网络,该模块将自动尝试连接到云平台。用户可以通过主控板发送连接指令,指定云平台的地址和认证信息。连接成功后,物联网模块即可开始采集传感器数据或其他设备数据,通过主控板发送数据传输指令,并将数据传输到云平台。通信程序框架如图9所示。
3.3 图像识别程序
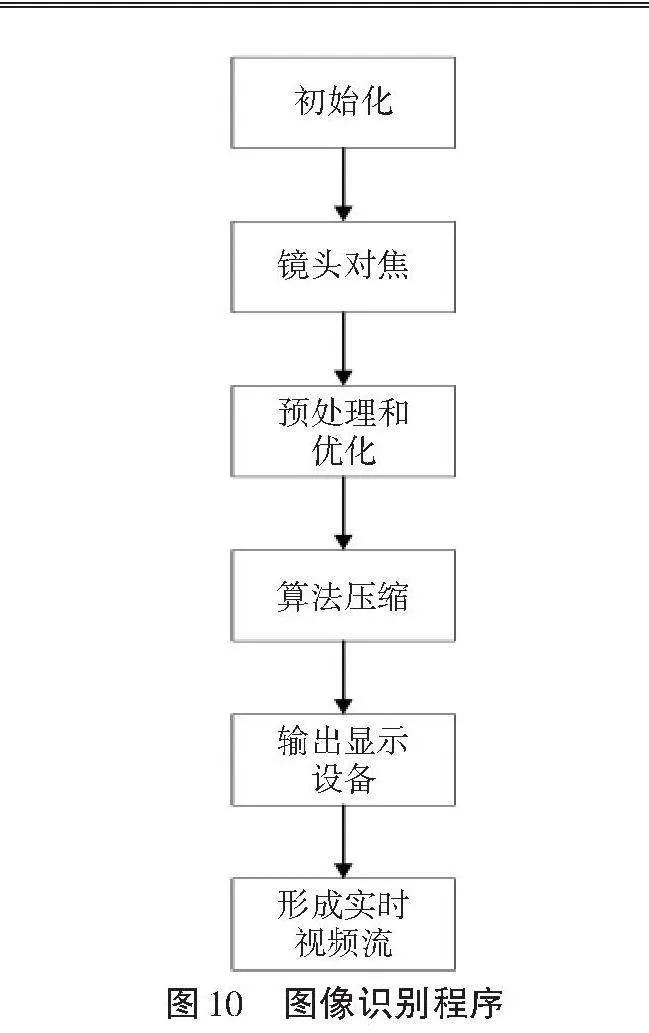
通过图像处理技术,可以对摄像头拍摄到的图像进行分析。首先,使用特征提取算法提取图像中的特征向量或关键点;其次,进行特征匹配和图像纠正,以确保准确性;再次,对感兴趣的区域进行提取和过滤,以去除冗余数据和噪声;最后,利用分类器对提取的特征进行识别,判断物体的类别,实现物体检测、人脸识别、颜色识别、物体分类等功能。图像识别框架如图10所示。
4 结语
传统循迹小车功能较为单一,不仅对随机或未知的环境适应性较差,当需要在无法提前设计路径的场景中使用时,小车的性能就会受到很大限制;而且受光线、地面材料、颜色等环境因素的影响,在无法保证这些条件下,小车的运行功能会受到影响。因此,本研究从硬件和软件两方面入手,优化小车整体工作能力。以Arduino mage 2560为控制核心,将循迹模块、通信模块、摄像头传感器、触摸屏模块、电源模块等硬件设备组装在一起,实现小车的自动循迹、通信和图像识别功能。当小车在预设路线上行驶时,通过循迹模块小车可以自动检测路线,若小车偏离路线,自动进行调整,继续按照指定路线前进。另外,小车可以与电脑端进行通信,相互传输数据或进行远程控制,以完成环境检测、巡检维护等工作,具有较强的扩展性和可兼容性。
参考文献:
[1]薛梁,方海峰,黄迪.基于arduino的麦克纳姆轮智能车设计[J].装备制造技术,2023(5):43-45.
[2]朱丹,陶晓庆,罗琛.基于光电传感器的智能小车系统的设计与实现[J].电子测试,2020(22):11-13.
[3]齐曼,胡乃瑞,安天洋,等.基于STM32和OpenMV的全自动无接触送药小车系统[J].电子制作,2022,30(21):21-23.
[4]曾文琦.智能小车跟随行驶系统的设计[J].工业技术与职业教育,2023,21(4):30-34.
[5]罗文杰,郭梦婷,谢雨杉,等.基于MSP430单片机的智能导盲小车设计[J].电脑知识与技术,2022,18(9):60-62.
[6]李金彦.自寻迹智能小车控制系统的设计与实现[J].集成电路应用,2022,39(12):10-13.
收稿日期:2024-03-18
基金项目:巢湖学院2023年度省级大学生创新创业训练计划资助项目(S202310380060X、X202310380013);高等学校省级质量工程项目(2022sx097);巢湖学院一流课程:自动控制原理(ch19ylkc028)。
作者简介:王长乐(2003—),男,本科生,研究方向:电气工程及其自动化。
通信作者:王静(1983—),女,硕士,副教授,研究方向:智能控制理论及应用。
