
基于图像识别的无人值守变电站二次设备智能巡检方法
2024-10-01 00:00印若嘉龚卜文张哲
无线互联科技 2024年18期








摘要:为解决现有巡检方法对变电站二次设备巡检时存在的巡检速率过低问题,文章提出了一种基于图像识别的无人值守变电站二次设备智能巡检方法。该研究通过图像识别技术提取无人值守变电站的二次设备特征点,以此为基础,采用区域神经网络实现二次设备的智能故障巡检。对比实验结果表明,该研究提出的智能巡检方法可显著提高巡检速率,为无人值守变电站的巡检工作开展提供便利条件。
关键词:图像识别;变电站;智能巡检;二次设备;无人值守
中图分类号:TP24 文献标志码:A
0 引言
随着电力行业的快速发展和智能化水平的持续提升,无人值守变电站逐渐成为电网运行的重要支撑。二次设备作为变电站的核心组成部分,其稳定运行对于确保电力系统的安全和可靠性至关重要。然而,传统的巡检方式过分依赖人工,存在巡检效率低下、误差率高等问题,已无法满足现代电网高效、精准、智能运维的需求[1-2]。因此,文章深入研究无人值守变电站二次设备智能巡检方法,以此提高巡检效果,为电网稳定运行奠定基础。
1 基于图像识别的无人值守变电站二次设备特征点提取
该研究须通过摄像头获取变电站二次设备图像。这些图像通常具有高清晰度,以便能够准确捕捉设备的细节。为进一步提升图像质量,该项目采取了图像增强措施,以改善对比度,降低噪声,有效抑制干扰。这些优化步骤有助于后续特征的提取与识别[3]。根据变电站二次设备的结构和特点,该研究选择适合的特征进行提取。这些特征包括设备的形状、大小、颜色、纹理等。通过图像识别技术,可对尺度不变特征变换(Scale-invariant feature transform,SIFT)的特征点进行提取。SIFT特征点提取可分为5个基本步骤。
第一,构建尺度高斯金字塔空间。这一步骤主要通过在不同尺度上应用高斯滤波构建多尺度图像金字塔,从而捕获图像在不同尺度下的特征信息。假设某个尺度的源图像用函数I(x,y)表示,高斯卷积核函数被定义为G(x,y,σ),计算后的尺度高斯金字塔空间被定义为S(x,y,σ),则高斯卷积核函数的计算公式为:
公式(1)中,σ表示高斯模糊系数。利用高斯卷积核对原始二次设备图像进行处理后,可得到尺度高斯金字塔空间,其表达式如下:
S(x,y,σ)=G(x,y,σ)×I(x,y)(2)
每个不同尺度的图像可称为Octave,设生成的高斯金字塔层数为O,则O的计算公式为:
O=[log min(M,N)]-2(3)
公式(3)中,M表示二次设备图像宽度;N表示二次设备图像高度。
第二,识别尺度差分高斯(Difference of Gaussian,DOG)金字塔空间的极值点。在尺度差分高斯金字塔空间中,该研究通过比较每个像素点与其邻域像素点的灰度值来确定那些在各个尺度上都表现为极值的点,即候选特征点[4]。DOG金字塔中图像与高斯金字塔中图像转换公式如下:
D(x,y,σ)=S(x,y,kσ)-S(x,y,σ)(4)
高斯差分图能较好地反映图像中像素的大小变化,能准确反映物体的形状。特征点通常被定义在多个尺度均表现显著变化的点,因此,可通过在高斯差分图中寻找极值点来完成特征点的识别并且往往不需要花费太多时间。只须将目标点邻近的8个点位,与上下两层应用不同高斯模糊参数地图中对应的9个点位进行比较,以此来选择一个局部最优值。
第三,准确找到端点位置。采用三维二次函数拟合方法确定端点的位置及尺度,以此来提高特征点的稳定性及抗噪性。
第四,计算极值点方向参数。对每一个极值点的大小和方向进行计算,其计算公式为:
公式中,m(x,y)表示极值点幅值;q(x,y)表示极值点方向。
第五,生成极值点描述符。以极值点为中心,在其邻域内采集图像局部的梯度信息,根据极值点的主方向进行旋转归一化,最终生成具有独特性的特征描述符,用于后续的图像匹配和识别任务。根据上述步骤,完成对无人值守变电站二次设备特征点的提取。
2 二次设备智能故障巡检
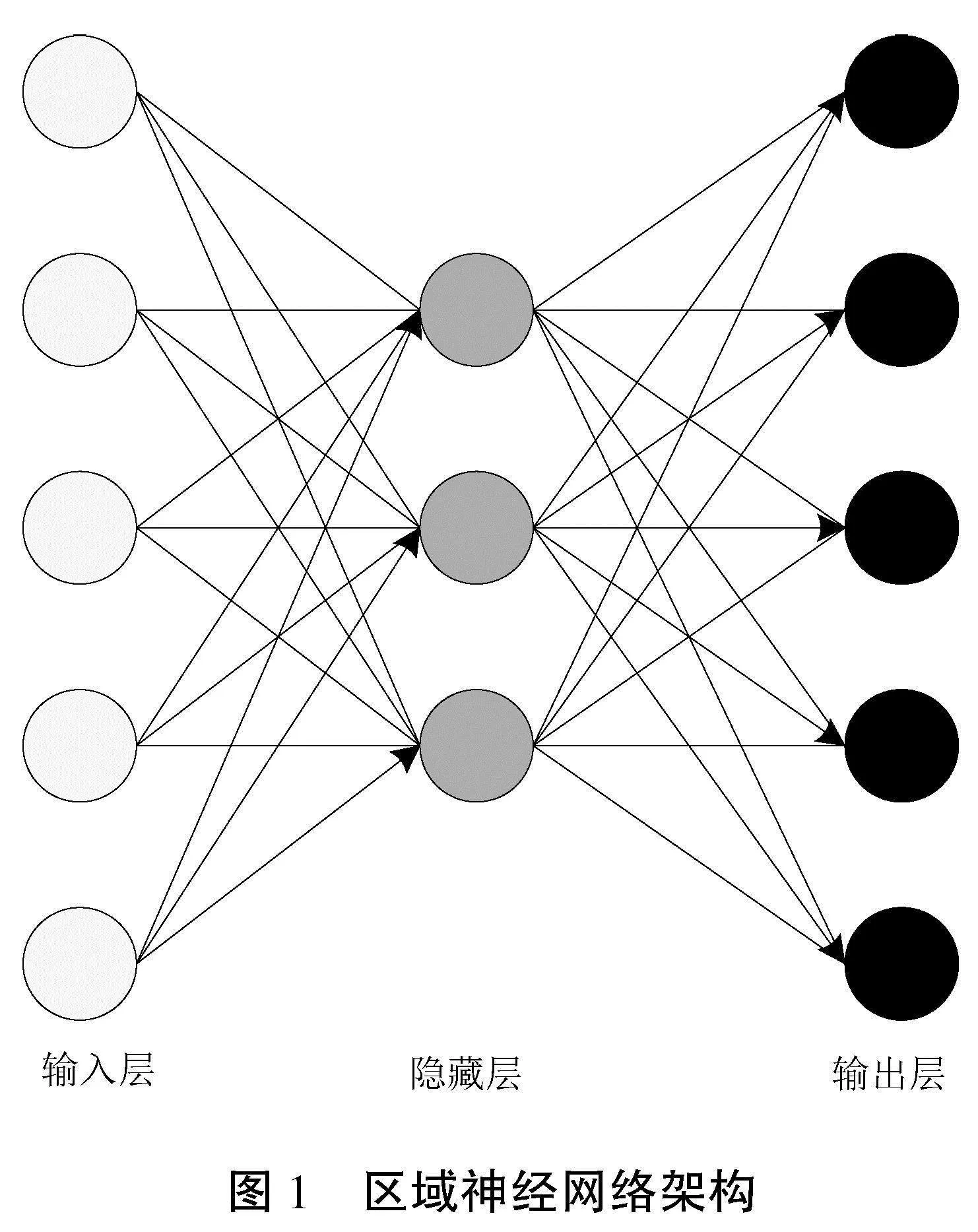
针对上述提取的特征点,该研究采用区域神经网络(Region-CNN,R-CNN)算法来实现无人值守变电站二次设备故障的自动化巡检。在这一巡检过程中,从目标点出发,将特征点活性值在拓扑空间中传播,以形成具有不同活性的场。该研究设计的巡检系统通常须要具备实时感知环境变化的能力,能够相应调整区域神经网络参数,以保持高效的故障检测能力。在巡检开始前,将所有神经元的活性值初始化为0,以确保系统处于一致且可预测的状态。随着巡检的进行,区域神经网络将不断学习并调整自身的权重和偏置,以适应各种复杂情况。区域神经网络模型函数表达式如下:
公式中,xi表示第i个神经元的活性值;A、B均为非负常数,表示活性值的衰减比和神经元活性值上界;k表示领域内的神经元数量;wij表示神经元i与神经元j之间的连接加权值。区域神经网络架构如图1所示。
利用区域神经网络实现故障巡检。该研究通过上述获取的无人值守变电站二次设备特征点,以此为基础,对收集到的数据进行预处理,包括清洗、标注、特征提取等,以便神经网络能够从中学习故障模式。将上述公式(7)作为区域故障巡检的神经网络模型,使用处理后的故障数据进行模型训练。训练过程中采用随机梯度下降法,其可表示为:
公式中,wt表示权值;η表示学习率。该研究应用基于梯度信息的自适应学习率优化算法(Adaptive Gradient,AdaGrad),其会引入自适应学习率,用普通学习率除以历史梯度的累积均方根来完成对应的学习率自适应。AdaGrad表达公式为:
公式中,Gt表示对角矩阵;e表示平滑项;J(wt)表示权值梯度。对于二分类问题,该研究设置的交叉熵损失函数表达式如下:
公式中,L表示交叉熵损失函数;N表示样本数量;yi表示样本真实标签;pi表示预测概率。
在模型训练完成后,该研究将其部署到实际的巡检场景中。当输入新的数据时,模型会进行前向计算,输出关于是否存在故障以及故障可能位置的预测。为提升巡检的实时性,该研究采用高效并行计算和分布式处理技术,将巡检工作分成若干子任务,将子任务分配到不同的运算节点。这种方法能有效地缩短巡检时间,提高巡检的响应速度。
3 对比实验
通过上述论述,完成对基于图像识别的无人值守变电站二次设备智能巡检方法的理论设计。为进一步检验所提方法在实践中的有效性,进行一项实验,采用3种不同的巡检方式进行对比。这3种方式分别是:基于随机树结点的巡视方式(控制组A)、基于无人机航拍的巡视方式(控制组B)以及该研究提出的基于图像识别的智能巡检方法。通过对比巡检效果,实现对3种方法应用性能的验证。实验研究对象为装机容量为300 MW水电站连接的变电站。智能电表作为变电站的重要组成部分,负责精确测量有功功率、无功功率、电流及电压等关键参数。为优化资源配置和提升运营效率,该研究采用MNFVMANO实体来设定R切片,这一实体会向K3s平台发出指令,使得边缘(Variance Inflation Factor,VIF)的配置与实例化成为可能。在边缘节点的管理中,特别将MEC(Mobile Edge Computing)平台、UPF(Universal Plat Form)平台和EC(Electronic Commerce)平台的应用模块部署为ocke容器,由K3s作为VIM(Vi Improv-ed)以POD(Print on Demand)的形式进行高效管理。针对该变电站中的二次设备,选用故障发现率(即速率)作为性能评价指标,对3种方法的性能进行量化对比。巡检时巡检速率表达式如下:
公式中,rate表示巡检速率;TR表示变电站二次设备的允许例外情况;TP表示巡检过程中检测到的实际存在的故障;Dc表示总数据数量。在上述公式的基础上,记录3种巡检方法的巡检结果,得到如表1所示的结果。
从表1中的数据可以看出,该研究提出的智能巡检方法在巡检速率方面展现出了显著优势,其巡检速率值始终保持在95.00%以上的高水平,充分证明了该方法的高效性。相比之下,对照A组和对照B组的巡检速率值则较低,大致在70.00%~82.00%,这表明所提出的智能巡检方法在性能上具有明显优势。进一步分析数据发现,其巡检速率值并非固定不变,而是受到巡检频率的显著影响。随着巡检频率的增加,巡检速率值也会提升,这意味着更频繁地巡检能够带来更高的巡检效率。然而值得注意的是,提高巡检频率也会导致巡检成本的增加。因此,在实际应用中,须要仔细权衡巡检效率和成本之间的关系,以确定最佳的巡检频率和方案。综合上述实验结果可知:基于图像识别的巡检方法具备更高的巡检应用性能,其不仅能够保证巡检效率,还能降低巡检成本。因此,在未来的工作中,可进一步推广与应用这一方法,以提高电力系统的安全性和可靠性。
4 结语
本文通过对无人值守变电站二次设备智能巡检方法的研究,提出了一种基于先进智能算法和技术手段的巡检方案,实现了对二次设备的快速、准确、全面检测。该方法不仅提高了巡检效率和质量,降低了人工巡检的成本和风险,还为电力系统的智能化、自动化、信息化提供了强有力的支撑。
参考文献
[1]王光璞,丁伟,刘庆达,等.变电站智能巡检机器人数字孪生系统研究与应用[J].电气开关,2024(1):52-55.
[2]左坤,张晓兰,李良书,等.变电站机器人智能巡检与联动控制算法的应用研究[J].自动化技术与应用,2024(1):18-21.
[3]李琦,陈小龙,洪汛.融合改进蚁群算法与动态窗口法的变电站智能巡检机器人路径规划分析[J].自动化与仪器仪表,2023(12):187-191.
[4]李智强.基于无人机航拍摄影的变电站运行环境智能巡检方法[J].电气技术与经济,2023(10):146-148.
Intelligent inspection method for secondary equipment of unattended substation
based on image recognition
Abstract: In order to solve the problem of too low inspection rate for the secondary equipment in the substation, this paper proposes an intelligent inspection method for the unattended substation secondary equipment based on image recognition. In this study, the characteristic points of the secondary equipment in the unattended substation are extracted from the image recognition technology, and on this basis, the regional neural network is used to realize the intelligent fault inspection of the secondary equipment. The comparative experimental results show that the intelligent inspection method proposed in this study can significantly improve the inspection rate and provide convenient conditions for the inspection work of unattended substation.
Key words: image recognition; substation; intelligent inspection; secondary equipment; unattended
