面向人体运动模式的SVM识别方法
2024-09-24 00:00:00张含包祖超朱文馨陈志康董子涵
物联网技术 2024年5期







摘 要:随着社会智能化技术的不断发展,人体运动识别技术在生活中运用得越来越广泛,尤其是在运动领域。此外,在智能可穿戴设备的发展趋势下,IMU(Inertial Measuring Unit)技术也将被广泛应用于各种健康监测和运动辅助设备中。文中从传感器节点设计与部署、IMU系统误差校准、数据预处理、SVM (Support Vector Machine)算法等方面对人体运动模式的识别展开研究。通过使用多个IMU传感器节点构建的可穿戴数据收集系统,能够捕捉到人体运动过程中的三轴加速度和三轴角速度信息,并将这些信息通过机器学习算法进行处理,从而准确地识别出人体的运动状态。
关键词:人体运动识别技术;IMU;可穿戴数据收集系统;机器学习;数据预处理;SVM
中图分类号:TP391.4 文献标识码:A 文章编号:2095-1302(2024)05-000-05
0 引 言
运动模式是对人体日常运动的分类,例如行走、跑步、站立、静坐等,而运动模式识别是指通过获取人体运动信息对各种运动模式进行分类的过程。随着社会智能化技术的不断发展,人体运动识别技术在生活中的运用越来越广泛,尤其是在运动领域,例如智能手环、手表、鞋垫,都配有人体模态检测芯片,它们能够实时监控并记录人类的身体活动情况。这对于用户的健康管理和运动训练起到了很大的帮助作用。
在上述应用中,高效精准地识别出活动模式能够帮助我们更好地理解人类与其周围环境之间的关系。它在本质上弥合了低级别流式传感器数据和高级别需求导向应用之间的差距[1]。然而,由于人类行为的固有性质,人类活动在特征上与不确定性、多样性、并发性和重叠性有关。因此,现实世界中的人类活动识别是一个具有挑战性且有重大意义的研究课题,也吸引了来自不同领域的研究人员的注意。
截至目前有两种方式能够获取人体的运动模式,分别是基于计算机图像处理技术的人体运动识别和基于多传感器的人体运动识别。传统的运动模式识别是基于计算机图像处理技术的,其首先通过高清摄像机捕捉识别对象,然后对捕捉对象进行跟踪拍摄,得到一组视频序列,最后通过对视频序列进行分类来实现对运动模式的识别。然而,这种识别方式存在很多缺点和局限[2]:(1)在实际生活中,摄像机非常容易受工作环境的影响,障碍物遮挡或背景噪声等均会影响拍摄的视频序列质量;(2)图像处理算法运算复杂,难以在嵌入式端实现,通常需要在云端运行算法,然后再回传识别结果,因而识别实时性较差;(3)由于摄像机不具备可穿戴的特点,因而难以做到对特定目标对象的长时间跨环境持续跟踪监测;(4)摄像机采集的图像数据存在个人隐私泄露现象;(5)硬件成本过高,没有普适性。
在智能可穿戴设备的发展趋势下,惯性测量单元(Inertial Measuring Unit, IMU)技术也将被广泛应用于各种健康监测和运动辅助设备。IMU是一个由惯性传感器构成的传感器组件,包括加速度计和速率陀螺仪。IMU不仅在运输车辆中被广泛使用,而且在诸如移动电话、游戏机、扫地机器人等民用领域也占有极大市场[3]。因此基于微机电系统(Micro Electro Mechanical Systems, MEMS)的IMU,凭借其体积小、重量轻、功率低、价格低的优势实现了大规模生产。
在基于IMU的运动模态检测方法中,经过训练的活动识别器的性能在很大程度上取决于分类模型的选择和相应特征子集的选择。因此,研究人员在探索有效和高效的分类模型方面进行了大量工作。常用的分类模型包括朴素贝叶斯、k-近邻、神经网络、决策树、支持向量机、随机森林、隐马尔可夫模型和条件随机场。目前,基于IMU的运动模态检测算法都采用了平面分类器,将所有待预测的活动都处理在同一水平上。平面分类器一般需要先构建一个分类器,以忽略活动之间的层次关系为代价,在一个步骤中区分所有预定义的活动。另一方面,有些人体运动会产生非常相似的传感器读数,这使得活动模式难以区分。针对这种情况的一个解决方案是设计一个更细粒度的分类模型来逐步对类似的活动进行分类。在特征工程方面,现有的大多数工作旨在提取丰富的时域和频域特征,以更好地表征原始传感器信号。这些方法往往包含不相关和冗余的特征,这导致分类器的泛化能力较差,并降低了识别精度[4-6]。缓解这一问题的一种可行方法是使用特征选择方法识别判别特征的子集。目前,有大量的特征选择方法可用,研究人员已经探索了其中的许多方法来构建活动识别器。但大多数方法都需要在测试者身上佩戴多个传感器,以获取高精度的人体运动数据,这无疑增加了系统使用成本。
本文为了降低可穿戴人体运动检测设备成本并保证模式检测精度,提出一种传感器布置方案,并对前端数据进行预处理,结合支持向量机(Support Vector Machine, SVM)算法,实现低成本高精度人体运动模式检测。
1 传感器节点的部署与选择
1.1 节点设计
本设计的最小硬件系统设计主要包含传感器模块、微处理器模块、电源模块通信链路。系统整体的框架如图1所示。
1.2 节点部署
该设计的信息感测单元是MEMS传感器。考虑到本设计的应用场景,系统设计需要满足高精度、小尺寸、低功耗和易穿戴的要求。为了使用最小数量的传感器单元来设计具有最高精度的模式识别系统,我们需要找到最佳的放置节点。IMU单元用于测量下肢节段的角速度和线加速度,作为直接的生物力学变量。同时,使用IMU的直接输出,间接计算矢状面上的下肢关节和节段倾斜度。输出经过几个信号调节阶段以去除噪声和偏置。此外,通过传感器的本体校准消除了对原始数据的错位影响。由于每条腿的生物力学信号(变量)的相应特征存在冗余,仅捕获下肢一侧的运动就足够了。因此,结合Hanavan人体模型,分析生活中常见运动模式的异同[7-8],得出以下结论:人体运动模式表达的最佳位置是腰部和大腿。由此确定了传感器节点的部署位置,如图2所示,图中标注五角星的位置即 MEMS传感器的放置位置。
2 IMU系统误差校准
在理想的惯导坐标系中,三轴加速度计坐标系(λx轴、λy轴、λz轴)和三轴陀螺仪坐标系(ξx轴、ξy轴、ξz轴)是完全重合的,由于存在设计和加工误差,二者会存在一个误差角度,如图3所示。同时还会产生标度因子和零偏误差,这些是影响坐标结果精度的主要因素。本设计利用多目标捕获定位信息的算法,先采集多种静态条件下三轴的加速度值即λx、λy、λz,作为加速度计模型参数的求解条件;再利用校准后的数据辅助校准角度参数,优化系统参考坐标系。
3 数据预处理
3.1 异常值检测
本系统前端数据通过IMU传感器获取,在保证元器件在额定电气状态下工作,一般不会出现数据异常,但考虑到可穿戴设备的应用场景,传感器数据获取过程中有可能出现器件掉落、电源掉电、环境噪声过大等现象,系统前端数据就会出现异常值。抽象地说,异常值是指偏离预期正常行为的模式,那么正常的行为模式可以用一个区域来表示,所有正常观测结果可视为属于该正常区域,不属于该区域的视为异常值。异常值检测方法有很多种,如基于距离、基于概率分布、基于基数,这里我们用的是基于概率分布,利用统计学最常见的正态分布,如图4所示。根据传感器获取数据的分布概率情况,判断数值是否异常。
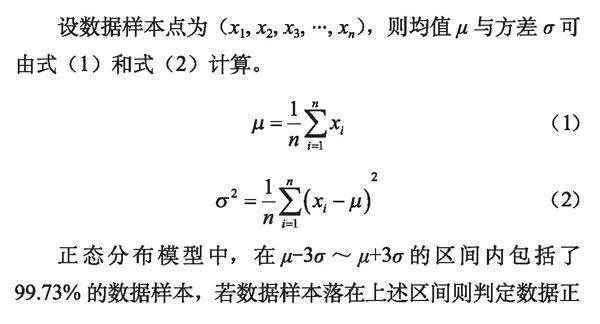
设数据样本点为(x1, x2, x3, ..., xn),则均值μ与方差σ可由式(1)和式(2)计算。
(1)
(2)
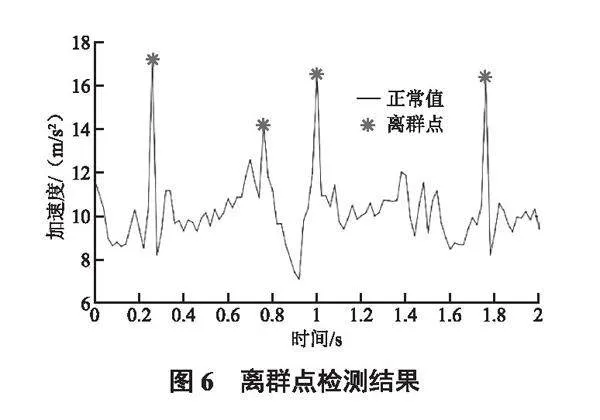
正态分布模型中,在μ-3σ~μ+3σ的区间内包括了99.73%的数据样本,若数据样本落在上述区间则判定数据正常,如果数据样本不在此区间内则判定数据为异常值,直接丢弃处理。综合以上分析,本文所使用的离群点处理流程如图5所示。离群点检测结果如图6所示。
3.2 数据降噪
对于采集到的数据,除了需要进行异常值检测并剔除,还需要对数据进行降噪滤波处理,由于数据传递过程中可能受到机械噪声、电子噪声以及电磁波信号的干扰,因此降噪滤波是得到有用数据之前的必经处理步骤。这里我们利用运放MAX9203搭建迟滞比较器实现数据降噪。运放供电电压为±5 V,结合人体运动信息的一般频率带宽,设计电路参数,搭建的电路如图7所示。
4 基于SVM的人体运动模式识别
4.1 SVM原理
SVM是由Vapnik引入的一种用于分类和回归任务的基于核的机器学习模型[9-10]。近年来,支持向量机非凡的泛化能力及其最优解和判别能力吸引了数据挖掘、模式识别和机器学习界的关注。支持向量机已被作为解决实际二进制分类问题的强大工具。
SVM是一种用于数据分类和回归分析的强大技术。通过使用SVM直接从训练数据中确定决策函数,使得决策边界之间的现有间隔(裕度)在称为特征空间的高维空间中最大化[11-12]。这种分类策略最大限度地减少了训练数据的分类误差,并获得了更好的泛化能力。尤其是在输入数据数量较少的情况下,SVM分类技能优势更为显著。
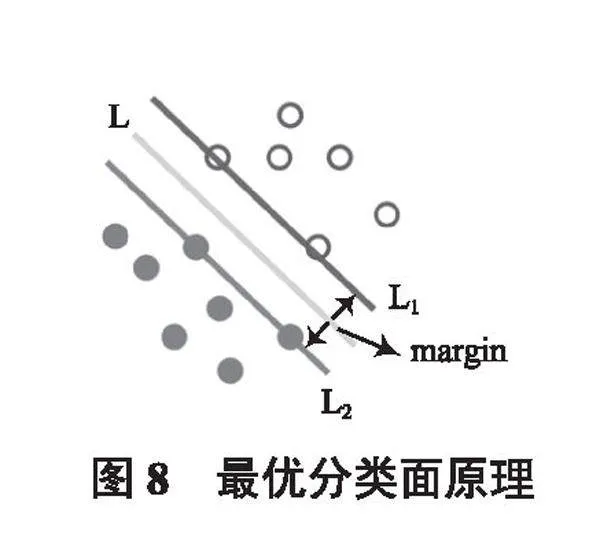
为了进一步深入理解SVM的原理,可以结合图8进行说明。图中的实心圆点和空心圆点表示两类训练样本,L为分类线,L1和L2表示距离分类线最近的样本,三条直线两两平行。其中L1和L2之间的距离称为分类间隔,这里用margin来表示[13-16]。
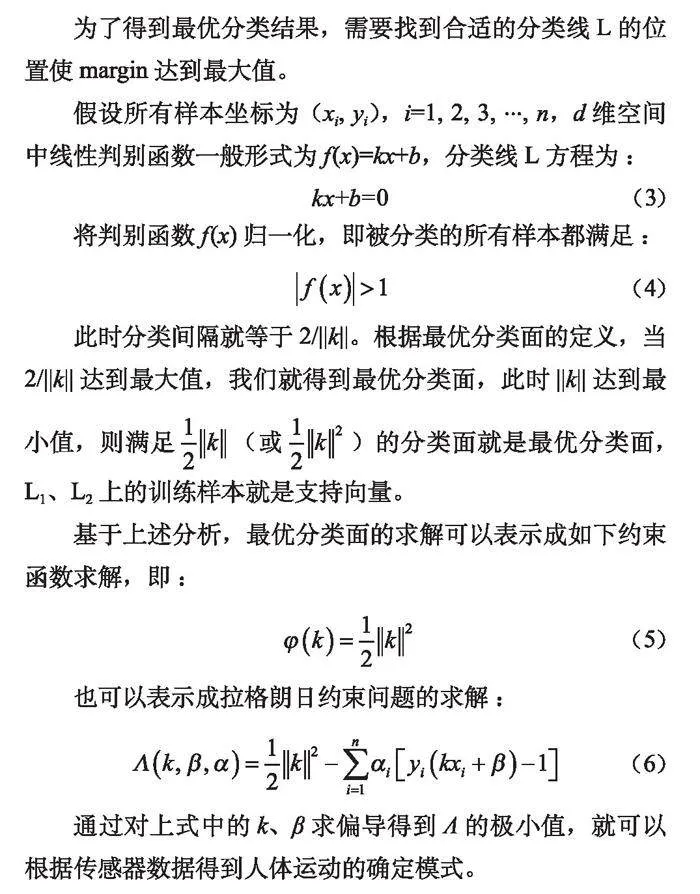
为了得到最优分类结果,需要找到合适的分类线L的位置使margin达到最大值。
假设所有样本坐标为(xi, yi),i=1, 2, 3, ..., n,d维空间中线性判别函数一般形式为f(x)=kx+b,分类线L方程为:
kx+b=0" " " " " " " " " " " " " " " " " " " " (3)
将判别函数f(x)归一化,即被分类的所有样本都满足:
(4)
此时分类间隔就等于2/||k||。根据最优分类面的定义,当2/||k||达到最大值,我们就得到最优分类面,此时||k||达到最小值,则满足(或)的分类面就是最优分类面,L1、L2上的训练样本就是支持向量。
基于上述分析,最优分类面的求解可以表示成如下约束函数求解,即:
(5)
也可以表示成拉格朗日约束问题的求解:
(6)
通过对上式中的k、β求偏导得到Λ的极小值,就可以根据传感器数据得到人体运动的确定模式。
4.2 特征提取
经验模态分解(Empirical Mode Decomposition, EMD)是一种针对非线性和非平稳信号的自适应分析方法。它可以基于信号的局部特征时间尺度将复杂信号分解为固有模式函数(IMF)的集合。然而,由于模式混合的问题,它不能准确地揭示信号特征信息。为了缓解EMD中出现的模式混合问题,提出了集成经验模式分解(EEMD)[16-20]。利用EEMD,可以从信号中提取具有真正物理意义的成分。
为了提取EEMD特征,需要将有限幅度的白噪声添加到信号中,添加的白噪声将均匀地填充整个时频空间。当信号被添加到均匀分布的白背景中时,不同的信号被自动投影到由白噪声以适当的参考尺度建立的背景中。随着平均次数的增加,剩余噪声会逐渐减小,可以有效改进EMD分解中容易产生频率混叠的问题[21-24]。
考虑到惯性传感器采集到的数据特征,一般为非线性非平稳信号,因此利用EEMD分解信号并提取有效参数是运动识别的关键步骤。特征提取过程如下:腰部传感器节点靠近人体重心,主要用于检测人体整体运动趋势;大腿部位传感器用于检测运动细节,如运动速度的快慢、运动的角度等。每个节点上的六轴传感器都可以同时获得三个轴向上的加速度信息(λx、λy、λz)和角速度信息(ξx、ξy、ξz)。
对于三轴方向的运动数据,节点可以测量x、y、z三个方向上的惯性信号分量,用于表达人体在不同方向上的运动。合加速度和合角速度用于表达肢体整体运动,计算公式如下:
(7)
(8)
4.3 分层算法
本设计检测的模式对象主要针对人体日常生活中的基本运动模式,如站、坐、匀速走、加速跑、上下楼梯等。为了进一步提高运动信号提取特征效率,我们可以提前根据信号的特征对其进行分类。首先可以将信号分为静态和动态。静态运动模式如坐、躺、站;动态运动模式如走、跑等。在此基础上,再结合角速度传感器分析运动模式的姿态,就可以更快速地得到运动模式。运动状态分类结果如图9所示。
5 实验结果
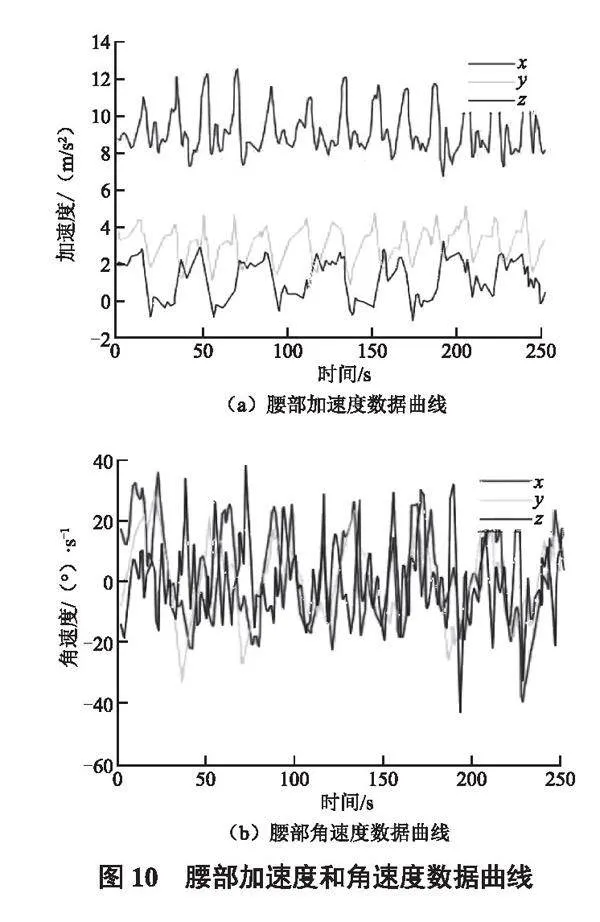
实验中,节点采样率为25 Hz,每次采集时间长度为5 s的数据,每种模式采集60次。图10和图11分别为匀速步行运动状态下腰部和大腿部六轴传感器加速度和角速度数据。
6 结 语
本文基于IMU对日常生活中常见的六种行人活动识别进行研究,重点研究了IMU校准、数据预处理、特征提取和分类识别算法中SVM等重要技术,并研究了IMU系统误差校准方法。通过对IMU的系统误差成分和导致系统误差的原因进行分析,建立了三轴加速度系统误差模型计和三轴角速度系统误差模型,设计IMU系统误差校准算法并建立算法校准流程。针对仪器噪声、人为操作失误等原因造成的数据异常情况,提出了与论文研究背景相关的数据预处理方法:离群点检测、EEMD阈值数据降噪。
参考文献
[1] LEE D,LEE S,PARK S,et al. Test and error parameter estimation for MEMS-based low cost IMU calibration [J]. International journal of precision engineering and manufacturing,2011,12:597-603.
[2] WANG A,CHEN G,WU X,et al. Towards human activity recognition:a hierarchical feature selection framework [J]. Sensors,2018,18(11):3629.
[3] JOHANSSON G. Visual perception of biological motion and a model for its analysis [J]. Perception amp; psychophysics,1973,14:201-211.
[4] SINGH K,UPADHYAYA S. Outlier detection:applications and techniques [J]. International journal of computer science issues,2012,9(1):307.
[5] HODGE V,AUSTIN J. A survey of outlier detection methodologies [J]. Artificial intelligence review,2004,22:85-126.
[6] CERVANTES J,GARCIA-LAMONT F,RODRÍGUEZ-MAZAHUA L,et al. A comprehensive survey on support vector machine classification:applications,challenges and trends [J].Neurocomputing,2020,408:189-215.
[7] LEI Y,HE Z,ZI Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery [J]. Mechanical systems and signal processing,2009,23(4):1327-1338.
[8]薛洋. 基于单个加速度传感器的人体运动模式识别[D]. 广州:华南理工大学,2011.
[9]常虹. 基于多特征融合的人体运动姿态识别技术研究[D].天津:河北工业大学,2018.
[10]卢光磊,张明社.一种对车载惯导中平动加速度干扰的处理方法[J].空间电子技术,2019,16(2):83-87.
[11]刘生忠. 基于MIMU的人体运动模式识别方法研究[D].南京:东南大学,2019.
[12] MA H T,ZHANG X,YANG H,et al. SVM-based approach for human daily motion recognition [C]// TENCON 2015-2015 IEEE Region 10 Conference. [S.l.]:IEEE,2015:1-4.
[13]马语晗,赵辉. 基于特征选择加权支持向量机的运动模式识别[J]. 传感器世界,2018,24(9):28-33.
[14]林述琦,吴华宇,林娟.基于运动生物力学的优化运动鞋功能设计[J].美术大观,2013,26(4):112.
[15] JENITTA J,RAJESWARI A. Denoising of ECG signal based on improved adaptive filter with EMD and EEMD [C]// 2013 IEEE Conference on Information amp; Communication Technologies. [S.l.]:IEEE,2013:957-962.
[16]田真. 基于插值思想的高维稀疏数据离群点检测方法研究[D].兰州:西北师范大学,2020.
[17]褚丽恒,郭晓泽,宋国杰,等. 基于聚类方法的高速公路逃费甄别与分析[C]//第八届中国智能交通年会论文集.北京:电子工业出版社,2013:61-68.
[18]胡春生,赵汇东. 基于腕部IMU数据采集的人体运动模式识别[J]. 宁夏大学学报 (自然科学版),2021,42(1):45-50.
[19]孙伟,姜伟,黄恒,等. EEMD降噪的行人活动识别方法[J].导航定位学报,2021,9(3):41-47.
[20]刘韬,徐爱功,隋心.惯性导航EEMD区间阈值降噪方法[J].测绘学报,2018,47(7):907-915.
[21]姜伟. 基于MIMU的人体运动模式识别方法研究[D].阜新:辽宁工程技术大学,2021.
[22]施启军,潘峰,龙福海,等.特征选择方法研究综述[J].微电子学与计算机,2022,39(3):1-8.
[23]罗红郊,马晓琴,孙妍,等.基于RFE特征选择的PSO-SVM用电量预测算法[J].电子设计工程,2023,31(20):172-176.
[24]田豆,李凤莲,张雪英,等.特征选择融合深度强化学习分类模型的构建及应用[J].电子设计工程,2022,30(12):93-97.
作者简介:张 含(1994—),女,硕士,南京理工大学紫金学院助教,研究方向为MEMS惯性导航。
包祖超(2002—),男,本科,南京理工大学紫金学院,研究方向为嵌入式系统、光电信息科学与工程。
朱文馨(2002—),女,本科,南京理工大学紫金学院,研究方向为传感器技术、物联网技术。
陈志康(2002—),男,本科,南京理工大学紫金学院,研究方向为嵌入式开发、光电信息科学与工程。
董子涵(2003—),男,本科,南京理工大学紫金学院,研究方向为电子信息工程。
收稿日期:2023-05-11 修回日期:2023-06-08
基金项目:2021年江苏省大学生创新创业训练计划项目
猜你喜欢
科技创新与应用(2016年31期)2016-12-03 03:33:48
中国市场(2016年41期)2016-11-28 05:30:48
时代金融(2016年27期)2016-11-25 17:51:36
科教导刊(2016年26期)2016-11-15 20:19:33
科学与财富(2016年28期)2016-10-14 21:19:17
电脑知识与技术(2016年10期)2016-06-16 21:32:52
中国中医药图书情报(2015年3期)2015-09-09 20:49:23