
基于QPSO改进LSTM发动机怠速预测的FPID控制
2024-09-20 00:00:00赵晴潘江如董恒祥郭鸿鑫
现代电子技术 2024年8期
关键词:故障分析





















摘" 要: 以北京现代伊兰特G4GD发动机为试验台,将电控系统故障作为实验变量,测得规定时间内双传感器组合发生故障时的发动机怠速,并选原车ECU较难控制的6种组合怠速故障进行分析。基于量子粒子群算法(QPSO)对长短时记忆神经网络(LSTM)隐含层节点、训练次数与学习率进行寻优预测,将预测结果与多种神经网络进行对比,并通过均方根误差(RMSE)评价指标进行判断。使用Origin数据拟合将预测输出结果进行数值拟合,之后输入Matlab中使用Simulink搭建控制单元模型,由模糊常量⁃积分⁃微分(FPID)控制器对输出结果进行怠速控制。结果表明:基于量子粒子群算法改进的长短时记忆神经网络预测效果最好;模糊常量⁃积分⁃微分控制器对怠速的控制可有效缩短电子控制单元(ECU)的控制时间,无超调,且可有效调节至规定怠速。
关键词: 发动机怠速; 量子粒子群优化算法; 长短时记忆神经网络; 模糊PID控制; 故障分析; 时间序列预测
中图分类号: TN876⁃34; TP391" " " " " " " " " "文献标识码: A" " " " " " " " " " " 文章编号: 1004⁃373X(2024)08⁃0075⁃08
Improved LSTM engine idle speed prediction FPID control based on QPSO
ZHAO Qing1, PAN Jiangru2, DONG Hengxiang1, GUO Hongxin1
(1. College of Transportation and Logistics Engineering, Xinjiang Agricultural University, Urumqi 830052, China;
2. College of Control Engineering, Xinjiang Institute of Technology, Urumqi 830023, China)
Abstract: Taking Beijing Hyundai Elantra G4GD engine as the testing bench, and the electronic control system fault as the experimental variable, the engine idle speed when the dual sensor combination fails within the specified time is measured, and six combined idle speed faults that are difficult to control by the original vehicle ECU are selected for the analysis. Based on the quantum particle swarm optimization (QPSO) algorithm, the hidden layer nodes, training times and learning rate of the long⁃term and short⁃term memory neural network (LSTM) are optimized and predicted. The prediction results are compared with the results of various neural networks, and judged by means of the evaluation indicators such as root mean square error (RMSE). The predicted output results are numerically fitted by means of Origin data fitting and input into Matlab Simulink to build the control unit model. The fuzzy constant⁃integral⁃differential (FUZZYPID, referred to as FPID) controller is used to control the idle speed of the output results. The results show that the improved LSTM based on QPSO has the best prediction effect. The FPID controller can effectively shorten the control time of the electronic control unit (ECU) for idle speed control, without overshoot, and can be effectively adjusted to the specified idle speed.
Keywords: fuel engine idle; quantum particle swarm optimization algorithm; long short⁃term memory neural network; fuzzy PID control; fault analysis; time series prediction
0" 引" 言
发动机在怠速状态下的能源消耗约占车辆燃油总损耗[1]的30%。发动机怠速不稳定运转易导致零件磨损加剧、曲轴运转不稳定、噪声增大等问题,影响发动机使用寿命。张弓等基于Matlab的Simulink插件对车辆发动机怠速进行模糊RBF神经网络控制[2]。实验结果表明,模糊控制算法是对怠速转速有效控制的方法之一。储江伟通过对BP神经网络的训练,提出当电控发动机怠速不稳定时的故障识别方法,通过样本采集、网络设计、网络训练步骤确定故障识别模式,并讨论了神经网络应用于怠速分析时的常见问题[3]。
调查发现,当前对于发动机怠速的控制大多是对发动机怠速转动中的控制,而不是根据已知转速预测未来转速,从而对转速控制提前做出判断。长短时记忆神经网络(LSTM)是基于时间序列预测的神经网络模型,但该模型预测过程中的学习率、迭代次数等参数的设置会影响预测精度。学习率过高或过低都会导致学习精度下降;迭代次数过高则会增加计算机计算量和预测时间,反之易导致学习时长不够,输出次优解。
当前对汽车怠速的研究多集中于原车ECU控制,且对于传感器的研究绝大多数为单传感器故障分析,对于多传感器组合故障的数据研究较少,因此选取智能控制手段进行多传感器研究具有重要意义。
为丰富多种传感器同时发生故障时对燃油发动机怠速的控制手段,提高控制效率,本文提出一种基于量子粒子群算法(QPSO)改进的长短时记忆神经网络预测模型。首先基于量子粒子群算法(QPSO)对长短时记忆神经网络(LSTM)隐含层节点、训练次数与学习率进行寻优预测,通过函数拟合得到传递函数;再将传递函数使用模糊常量⁃积分⁃微分(Fuzzy PID, FPID)控制器进行控制,一方面改进粒子群算法易输出次优解的问题;另一方面,对LSTM网络参数进行寻优,在保证预测精度的基础上降低预测时间;最后对预测函数进行有效控制。
1" 实验设计
使用北京现代伊兰特G4GD发动机作为试验台,该试验台正常怠速转速为700~800 r/min。选取8种常见的传感器故障,若两种故障同时发生,则有28种不同排列组合情况。在28种不同排列组合故障中选取6组故障组合进行分析。实验所选取故障组合均导致怠速转速与理想怠速差距过大,且已造成缸内爆燃现象,因此本文针对6组故障组合进行预测控制,所选故障以及故障编码如表1所示,基础实验数据如图1所示。
2" 预测控制
2.1" 量子粒子群算法
在粒子群算法(PSO)中,每个粒子都用速度和位置关系进行描述,种群进化过程则由适应度函数值来描述。第i个粒子可用如下公式表示[4]:
[Z=(vij,xij,pij)]" " " " " " " " "(1)
式中:[vij]表示粒子演化速度;[xij]表示粒子在演化中的位置;[pij]表示自身粒子在演化中的最佳位置,j=1,2,…,D,D表示要优化的解决方案的维度[4]。
粒子群算法在优化参数的同时也存在输出次优解、收敛速度快等问题。基于此,许多研究学者提出不同改进策略,如收缩因子与可拓模型综合求解、动静态区分的环境变化检测机制、增加聚类维度、结合模拟退火算法[5⁃10]等。
为解决经典算法容易陷入局部最优解问题,Sun等人引入量子力学概念,并提出了量子粒子群优化算法(QPSO),以提高全局优化能力[11]。在量子空间中,每个粒子都有量子行为,粒子的速度和位置不能同时确定,而是用粒子的波函数[ψ(x,t)]来描述。在空间中某一点x出现的概率可以用薛定谔方程来求解,然后通过Monte Carlo方法来获得如下的粒子迭代方程[12]:
[xi(t+1)=pi+βmbest-xi(t)·ln1u," 0.5≤θ≤1pi-βmbest-xi(t)·ln1u," 0≤θlt;0.5]" " "(2)
式中:[pi]是局部吸引粒子;β是收缩⁃膨胀系数;mbest是平均最佳全局点,定义为所有粒子的个人最佳位置和平均值; [θ]和u是[0,1]内均匀生成的随机数。[xi(t+1)]最大值为正无穷,最小值为[pi]。平均最佳位置[13]mbest公式如下:
[mbest=1Mi=1Mxpbest,i]" " " " " (3)
式中M表示颗粒的总体尺寸。
参数β用于控制收敛速度,调整β最常用的方法是线性变化[11],公式如下:
[β=βmax-(βmax-βmin)·ttmax]" " " "(4)
式中:[tmax]是最大迭代次数;βmax和βmin分别是参数β的最大值和最小值。
局部吸引粒子pi计算公式[13]如下:
[pi=φ1·xpbest,i+φ2·xgbestφ1+φ2]" " " " (5)
式中:[φ1]、[φ2]是[0,1]范围内均匀生成的随机数[13]。
2.2" 长短时记忆神经网络
长短时记忆神经网络(LSTM)是基于循环神经网络(RNN)易发生梯度爆炸问题而产生的基于记忆因子的改进预测网络模型。循环神经网络引入时序概念模型,但遇到输入时间增长等问题时,使用链式求导法会导致计算过程出现连乘形式,致使误差累积,从而出现梯度消失和梯度爆炸问题,导致学习的难度增加。
相比于RNN模型,长短时记忆神经网络增加了记忆单元,并引入遗忘门、更新门和输出门等记忆单元,也是这些记忆单元的引入使长短时记忆神经网络具有选择性学习与选择性遗忘的特点,可以对信息进行取舍,从而适用于处理具有时间间隔的时间序列数据。LSTM中隐含层节点、寻优次数与学习效率是人为定义的,隐含节点、寻优次数过多均会导致计算负担加重、计算时间增多。而学习效率过高则会导致学习结果趋向于单侧控制,训练时间步长过长会导致局部最优解等问题。因此,本文采用量子粒子群算法优化预测模型的隐含层节点、寻优次数与学习效率,与粒子群优化预测、无优化预测进行对比分析,并通过评价指标进行判断。
2.3" QPSO⁃LSTM预测控制
采用量子粒子群算法对隐含层节点、寻优次数与学习效率进行寻优,读取时间序列后将数据集划分为训练集与测试集,本文使用15∶1的比例进行训练与测试。确定LSTM网络结构后初始化神经网络参数,并将随机初始化粒子位置的QPSO算法引入,利用数据集计算个体适应度值。个体适应度值为评价标准之一,若满足QPSO训练标准,则将输出学习率等参数代入LSTM并训练LSTM网络,利用测试集验证网络并输出预测值,再经过反归一化后输出结果。使用均方根误差(RMSE)进行指标评价,公式如下:
[RMSE=i=1nyi-yin]" " " " " " " (6)
式中:[yi]与[yi]分别为预测值与真实值;n为预测数量。
控制预测过程共分为预测、寻优与控制三部分,如图2所示。将样本数与延时步长导入数据集后进行数据集划分,本次训练将训练集与预测集以15∶1的比例进行数据划分,数据归一化后引入QPSO寻优模型。寻优过程中首先定义种群规模,随机初始化速度与位置后进行隐含层节点与训练次数的寻优设置,更新速度与位置后计算适应度值并找到全局最佳位置;再经由边界检测输入LSTM数据寻优模块,重新计算粒子适应度,若适应度大于等于1则重新计算,反之进行指标评价并输出预测结果;最后,将输出预测值进行数值拟合并运行控制器。
3" 模糊PID控制
PID控制是一种线性控制,根据定值[r(t)]与实际输出值[y(t)]构成偏差,公式如下:
[e(t)=r(t)-y(t)] (7)
连续表达为:
[u(t)=KPe(t)+1T10te(x)dt+TDde(t)dt] (8)
通过模糊自适应控制,可以根据不同时刻的误差e和误差变化率ec对PID参数进行整定,从而实现对参数的有效调整,以达到预期控制效果。相较于PID控制的参数制定缓慢、模糊控制精确度较低等缺点,模糊PID控制融合PID控制的优点,将缺点有效排除,在控制方面有效避免了以上缺点。参数制定无法达到计算目标等问题,成为此次怠速控制的首选控制方式。
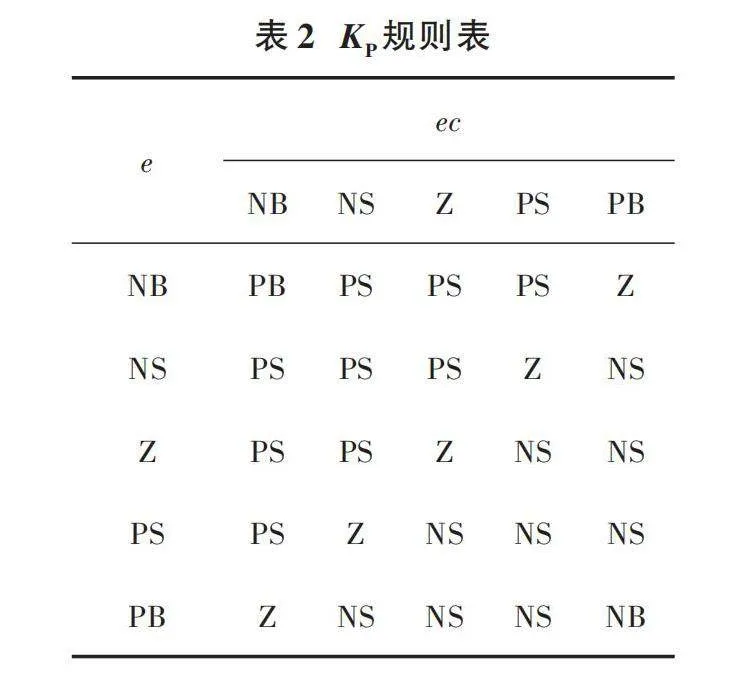
为克服PID控制参数的不确定性以及减少人为操作带来的误差,采用模糊自适应PID控制对控制参数进行整定,减小仿真误差。控制参数输出值如图3所示。参数规则表如表2~表4所示,其中NB、NS、Z、PS、 PB分别表示负大、负小、中、正小、正大。
模糊自适应PID控制器以偏差和误差变化作为输入,从而能够适用于不同误差e和误差变化率ec等对PID参数自整定的需要,模糊自适应控制原理图如图4所示。
本文仿真的隶属函数选择高斯型(gaussmf)隶属函数。高斯型隶属函数主要由[δ]和c两个参数确定,公式如下:
[f(x)=e-(x-c)22δ2]
式中:参数[δ]通常为正;参数c确定曲线的中心。
控制模块使用Matlab的Simulink仿真模块进行搭建,将如表5所示的传递函数输入S函数进行数值控制,以实验值输出控制、普通PID控制与模糊PID控制三输出为数值分析对象,对比两种不同控制器对原始函数的控制结果,控制模块如图5所示。
4" 基于QPSO⁃LSTM的预测结果分析
不同故障组预测的输出结果如图6所示。
由图6可看出,PSO⁃LSTM预测结果明显优于LSTM、CNN与BP神经网络预测,而QPSO⁃LSTM预测结果与原始数据误差较小,准确度高于PSO⁃LSTM。BP与CNN神经网络预测结果与原始数据偏移较多。
采用不同故障组与预测方法的输出结果如图7所示。
由图7a)可知:6种组合故障状态下,QPSO⁃LSTM控制的迭代训练时间明显短于LSTM与CNN神经网络控制。其中P113⁃0118训练时间降幅最大,P107⁃123、P1507⁃1224、P1507⁃0340次之,P130⁃0118、P1507⁃1224训练时间降幅明显。虽然BP神经网络迭代训练时间短,但均方根误差比QPSO⁃LSTM高,尤其以P1507⁃0340组明显,BP预测均方根误差要高出QPSO⁃LSTM预测99.87%,预测精度差。QPSO⁃LSTM迭代次数明显小于LSTM迭代次数,而PSO⁃LSTM由于陷入局部最优解导致迭代次数过低或过高,基础学习率变化明显,预测精度较差。
由图7b)可看出,QPSO⁃LSTM与PSO⁃LSTM的迭代次数明显少于其他几种预测方式,而使用PSO⁃LSTM预测时学习率较高且波动较大,即学习处于非平稳状态,极易导致次优解输出现象的发生,导致训练准确度低,鲁棒性较差。将预测结果进行数值拟合后得出传递函数,控制过程中对传递函数进行控制。各故障组传递函数如表5所示。
5" 控制结果
FPID控制器输出结果如图8所示,图中虚线表示原始输出,实线表示普通PID控制输出,点画线表示模糊PID控制器输出。由以下控制输出可清晰得出,原始数据输出时怠速转动抖动较高且偏离规定怠速。普通PID控制存在超调现象,较难达到规定怠速并使得怠速稳定转动。模糊PID控制无超调,平均控制时长缩短至1 s左右,短时间内可将怠速稳定控制于700 r/min左右,是良好的控制手段。
6" 结" 论
使用QPSO优化LSTM神经网络对发动机故障组进行怠速预测,将预测结果输入传递函数进行FPID控制,并将QPSO⁃LSTM预测结果与PSO⁃LSTM、LSTM、BP、CNN神经网络预测结果进行对比,得出结论如下:
1) 量子粒子群算法改进LSTM预测效果最好,其预测时间远低于LSTM算法,迭代训练时间节约率达89%。
2) 由于PSO⁃LSTM预测方式输出次优解等问题的存在,预测精度及计算速度均以QPSO⁃LSTM为佳。
3) QPSO⁃LSTM迭代次数适中,解决了LSTM为寻找最优解导致迭代次数过高、计算压力过大的问题。
4) QPSO⁃LSTM可有效排除PSO⁃LSTM预测策略中较易出现的次优解、收敛过快的问题。
5) 模糊PID控制手段良好,能够有效缩短PID控制的控制时间,避免了传统PID控制易超调、参数不可自主更改、控制时间延长等问题的出现。
注:本文通讯作者为潘江如。
参考文献
[1] 吴毅,帕孜来·马合木提,纪承乾.混合动力汽车发动机在怠速状态下的控制[J].机床与液压,2021,49(20):145⁃149.
[2] 张弓,邱容,张永相.基于SIMULINK的汽车发动机怠速模糊神经网络控制[J].小型内燃机与摩托车,2005(5):8⁃11.
[3] 储江伟.基于神经网络的电控发动机怠速不稳定的故障识别方法[J].东北林业大学学报,2002(1):44⁃47.
[4] ZHANG J, ZHANG J, ZHANG Q, et al. Obstacle avoidance path planning of space robot based on improved particle swarm optimization [J]. Symmetry, 2022, 14(5): 938.
[5] YANG Deqing. An improved particle swarm optimization algori⁃thm for parameter optimization [J]. Computer informatization and mechanical system, 2022, 5(4): 21⁃30.
[6] GUO Y, SHI Q, GUO C. Multi⁃period spare parts supply chain network optimization under (T, s, S) inventory control policy with improved dynamic particle swarm optimization [J]. Electronics, 2022, 11(21): 34⁃54.
[7] HUANG Y, ZHOU X. Research on strip crown by uncertain sampling strategy modified particle swarm optimization with RBF neural network [J]. Applied soft computing, 2022, 130: 109661.
[8] Robotics. Investigators from department of information techno⁃logy release new data on robotics [J]. Robotics amp; machine learning daily news, 2020(4): 31.
[9] Robotics. Investigators from IIT release new data on robotics (A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi⁃robot pathplanning) [J]. Journal of engineering, 2016(1): 10491.
[10] LI Sining, CHEN Kai. Economic operation of the regional integrated energy system based on particle swarm optimization [J]. Computational intelligence and neuroscience, 2022(59): 9764738.
[11] SUN J, XU W, FENG B. Adaptive parameter control for quantum⁃behaved particle swarm optimization on individual level [C]// Proceedings of 2005 IEEE International Conference on Systems, Man and Cybernetics.Waikoloa, HI: IEEE, 2005: 3049⁃3054.
[12] 吴磊,康英伟.基于改进粒子群优化长短时记忆神经网络的脱硫系统SO2预测模型[J].热力发电,2021,50(12):66⁃73.
[13] ZHAO L, CAO N, YANG H. Forecasting regional short⁃term freight volume using QPSO⁃LSTM algorithm from the perspective of the importance of spatial information [J]. Mathematical biosciences and engineering, 2023, 20(2): 2609⁃2627.
[14] AL⁃JARRAH M A, JARRAH A, ALAWAISAH A. Automotive engine idle speed controller: Nonlinear model predictive control utilizing the firefly algorithm [J]. Computers and electrical Engineering, 2023, 108: 108688.
[15] 池振坤,石京杰,李杨,等.汽车发动机怠速抖动故障分析与排除[J].内燃机与配件,2021(21):144⁃145.
[16] 贺民,王俪颖.汽车发动机怠速抖动故障诊断与检修方法[J].南方农机,2022,53(8):135⁃137.
[17] 袁银南,朱磊,王存磊,等.氢燃料发动机怠速控制策略制定及参数整定[J].农业机械学报,2008(3):14⁃18.
[18] 路颜,高攀科,程光威,等.液压混合动力汽车自动怠速系统控制策略[J].液压与气动,2022,46(1):169⁃177.
[19] 周冬冬,陈明霞,赵金迪.基于混合粒子群算法优化橡胶挤出机Smith⁃模糊PID温度控制系统[J].机床与液压,2022,50(16):125⁃130.
[20] 艾福强,包建东,刘正权.基于粒子群优化模糊PID控制的多足式真空吸附机器人控制方案设计[J].电子测量技术,2023,46(2):67⁃72.
[21] ZHANG X, XIA S, LI X, et al. Multi⁃objective particle swarm optimization with multi⁃mode collaboration based on reinforcement learning for path planning of unmanned air vehicles [J]. Knowledge⁃based systems, 2022, 250: 109075.
[22] YANG H, JIANG L, WU L. Path planning of mobile robot based on particle swarm optimization algorithm [J]. Journal of physics, 2021, 2093(1): 12⁃13.
[23] 任宪丰,袁文文,吴学强,等.基于长短时记忆神经网络的锂离子电池多维老化诊断[J/OL].吉林大学学报(工学版):1⁃14[2023⁃06⁃12].https://doi.org/10.13229/j.cnki.jdxbgxb.20230056.
[24] 赵巍.基于改进长短时记忆神经网络的5G通信网络流量预测[J].沈阳工业大学学报,2022,44(6):672⁃676.
[25] 郝可青,吕志刚,邸若海,等.基于鲸鱼算法优化长短时记忆神经网络的锂电池剩余寿命预测[J].科学技术与工程,2022,22(29):12900⁃12908.
[26] 任妮,鲍彤,刘杨,等.基于粒子群优化算法和长短时记忆神经网络的蟹塘溶解氧预测[J].江苏农业学报,2021,37(2):426⁃434.
作者简介:赵" 晴(1999—),硕士研究生,主要研究方向为载运工具运用与管理。
潘江如(1978—),博士,教授,主要研究方向为载运工具运用与管理。
猜你喜欢
农机使用与维修(2016年10期)2016-11-10 09:38:10
农机使用与维修(2016年10期)2016-11-10 09:35:58
农机使用与维修(2016年10期)2016-11-10 09:31:34
农机使用与维修(2016年10期)2016-11-10 09:26:11
科技视界(2016年18期)2016-11-03 00:07:51
中国科技博览(2016年22期)2016-11-01 16:52:33
经营者(2016年12期)2016-10-21 09:53:46
科学与财富(2016年28期)2016-10-14 19:00:08
科技视界(2016年20期)2016-09-29 11:49:51
企业导报(2016年8期)2016-05-31 18:48:53
