基于MATLAB图像处理技术的茅型瓶裂纹缺陷识别研究
2024-09-19 00:00:00邱旭沈富焦阳
现代信息科技 2024年13期







摘 要:茅型瓶是一种乳白色仿瓷玻璃瓶,具有较好的热稳定性、密闭性和遮光性,是茅台酒常用的包装材料,存在缺陷的酒瓶会出现酒渗漏、酒体挥发、酒体变质等。裂纹缺陷是常见的茅型瓶缺陷,利用MATLAB图像处理技术对茅型瓶裂纹缺陷进行识别,首先对缺陷图像进行灰度化、去噪、边缘检测等预处理,然后使用Hough变换法对预处理的缺陷图像进行识别,采用不同的裂纹缺陷图像进行验证。结果表明,霍夫变换能够检测不同形状和位置的茅型瓶裂纹缺陷,识别效果较好。
关键词:MATLAB;茅型瓶;裂纹缺陷;Hough变换
中图分类号:TP391.5 文献标识码:A 文章编号:2096-4706(2024)13-0161-06
Research on Moutai-shaped Bottle Crack Defect Recognition Based on
MATLAB Image Processing Technology
QIU Xu1, SHEN Fu2, JIAO Yang3
(1.Moutai Institute, Zunyi 564507, China; 2.Shenzhen Orient Dingsheng Technology Co., Ltd., Shenzhen 518000, China; 3.KWEICHOW MOUTAI CO.,LTD., Zunyi 564501, China)
Abstract: Moutai-shaped bottle is a milky-white porcelain like glass bottle with good thermal stability, airtightness, and light shielding. It is a commonly used packaging material for Maotai. Bottles with defects can cause leakage, volatilization, and deterioration of the liquor. Crack defect is a common defect in Moutai-shaped bottles. MATLAB image processing technology is used to identify crack defects in Moutai-shaped bottles. Firstly, the defect image is preprocessed with grayscale, denoising, edge detection, etc. Then, the Hough transform method is used to identify the preprocessed defect image, and different crack defect images are used for verification. The results indicate that the Hough transform can detect crack defects in different shapes and positions of Moutai-shaped bottles, and the recognition effect is good.
Keywords: MATLAB; Moutai-shaped bottle; crack defect; Hough transform
0 引 言
在白酒包装材料或酒瓶生产过程中,由于生产设备、环境、原材料、生产工艺、工人技术等因素,酒瓶不可避免地会产生裂纹缺陷,存在缺陷的酒瓶不仅会出现酒渗漏、酒体挥发、酒质变坏,还严重影响消费者的用酒体验和消费信心。当前的酒瓶缺陷检测仍然存在漏检、检测效率低、检测精度不高等问题,研究茅型瓶裂纹缺陷的自动识别,对于实现产品的快速检测、减少生产成本、提升品牌形象等具有积极的意义。
20世纪50年代,国外学者开始研发基于机器视觉技术的空瓶质量检验机,首台空瓶检测机于1958年问世。之后,许多公司相继推出了机器视觉检测设备,其中包括德国Siemens公司的SIMATIC VS710工业视觉检测系统和德国InnoLas公司的图像采集设备[1]。美国工业动力机械有限公司也推出了全方位检测玻璃瓶的机器[2]。这些设备能够快速捕捉清晰图像并实现较高精度的检测,但其造价高、灵活性差、技术维护困难等问题尚未解决。
国内厂家也在研发玻璃制品在线检测设备,例如北京赛腾动力有限公司推出的Saturn验瓶机、广州大元与北京四通电机联合开发的DS空瓶验瓶机以及山东三金玻璃机械有限公司与北京微视公司联合研发的摄像检验机[3]。这些设备基于不同的技术实现对瓶口缺口、瓶颈裂缝、气泡等缺陷的快速、无接触检测[4]。但与国外相比,国内的酒瓶缺陷识别研究起步较晚,大多仍处于探索阶段。
对于玻璃瓶缺陷识别的研究,Liu等人[5]将支持向量机与模糊理论相结合,用于瓶身缺陷检测。Yang等人[6]采用一种简单的阈值化和边缘提取方法来检测小瓶口缺陷。Zhou等人[7]采用一种快速的基于稀疏表示的检测算法来检测瓶盖的表面缺陷。Duan等人[8]采用超像素分割和双高斯滤波器提取罐头底部内表面的缺陷。Zhou等人[9]结合Hough圆检测与尺寸先验将瓶底特征区域划分为三个测量区域,并采用显著性检测、多尺度滤波、模板匹配等方法来检测三个测量区域从而判定被测瓶底的质量。尽管玻璃瓶缺陷检测的方法有很多,但大多方法是为了解决特定问题而提出的,只有少数方法可用于玻璃瓶裂纹缺陷的检测。
本文利用MATLAB图像处理技术对茅型瓶裂纹缺陷进行识别,首先对缺陷图像进行灰度化、滤波、边缘检测等图像增强处理,然后使用霍夫变换对增强后的图像进行缺陷识别,经过不同裂纹缺陷图像验证,证实霍夫变换能够检测不同形状和位置的茅型瓶裂纹缺陷,且识别效果较好。
1 茅型瓶裂纹缺陷图像预处理
所采集的酒瓶缺陷图像易受光照、设备、环境等因素的影响,导致酒瓶缺陷图像背景复杂,需要对图像进行预处理,达到去除噪声干扰,增强图像对比度和裂纹缺陷的细节等,步骤如图1所示。
1.1 灰度化
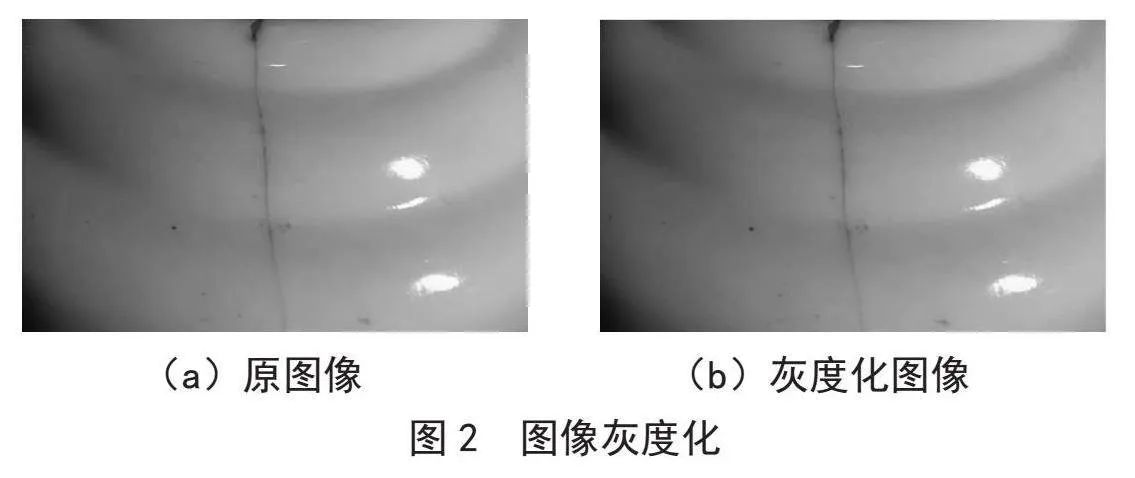
在机器视觉和图像处理中,一幅图像位于空间坐标中,该图像便可以看作是一个二维数组f (x,y),图像坐标中的每一个点(x,y)都有对应的幅值f,该幅值便称为该图像的灰度。其中,x和y是空间坐标,且f、x、y全都是非负有限离散。例如,一幅尺寸为k×j的数字图像,可以看作是由k行j列有限个小方块组成,每个小方块在图像中都有各自具体的位置及幅值,这些值代表每个小方块所处行列的物理信息,比如灰度与色彩。这些小方块称为图像要素,也叫像素。图像灰度化就是通过一定的方式将彩色图像转换为黑白图像,灰色图像与彩色图像相比,占内存更少,处理速度更快,并且可以在视觉上增加对比度,突出目标区域。缺陷图像原图如图2(a)所示,灰度化后如图2(b)所示。
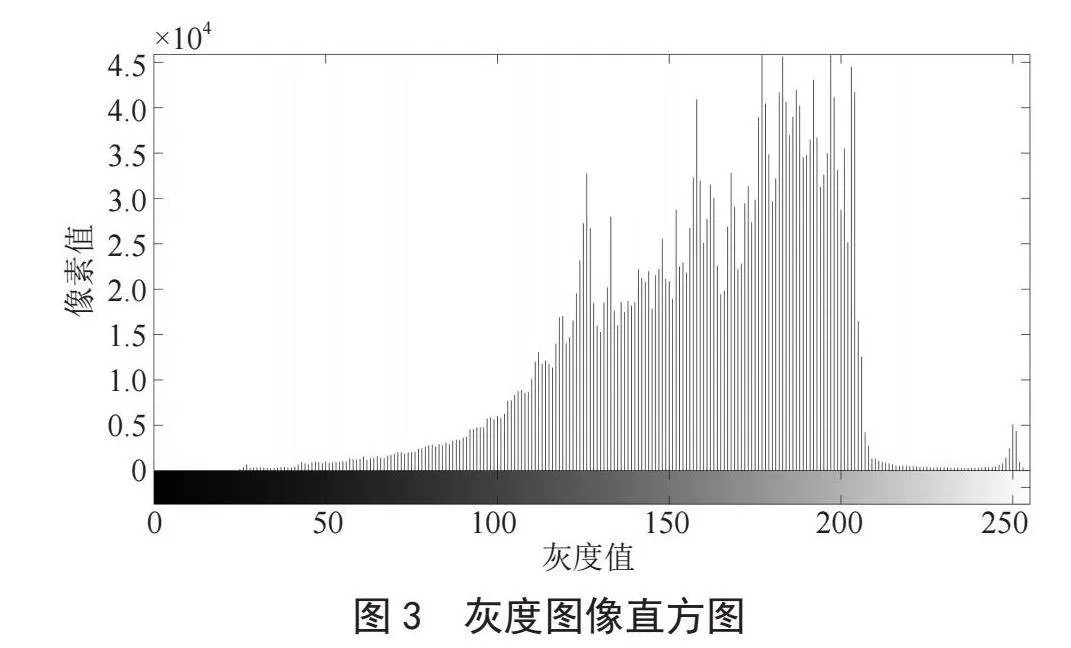
1.2 灰度变换增强
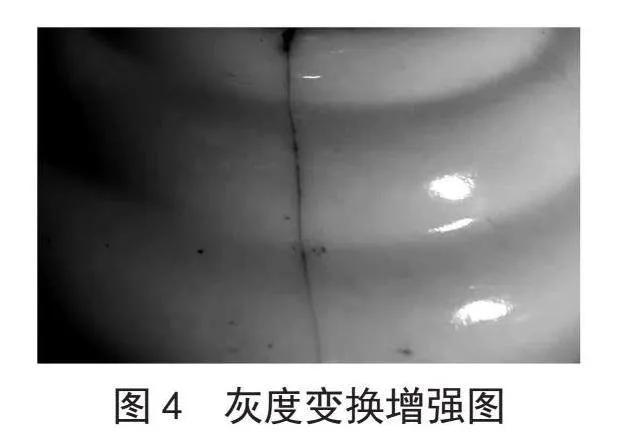
灰度变换技术能够增强图像的灰度,使用灰度变换增强,只是改变了对应点像素的灰度值,而不会改变对应点的位置,遍历图像中每个像素点并基于上述原理逐个变换所有像素点,在此过程中,不会涉及周围的其他像素点。在进行变换之前,必须先获取原图像的直方图,然后计算各灰度值的出现次数。原缺陷图像图2(b)的灰度图像直方图如图3所示,由直方图3可知,灰度值主要集中于100~200,由于正常灰度值大小的范围是0~255,若把100~200范围内的灰度值均匀分布于0~255范围内,那么灰度改变后图像的对比度会增强,变得更加清晰。具体处理步骤为:将原直方图中灰度值小于100的值置0,而大于200的灰度值赋值为255。用数学公式表示为:令图像灰度值在100~200范围内的灰度值为x,而图像灰度值在0~255之间的值为y,可表示为:
灰度变换增强后的图像如图4所示。
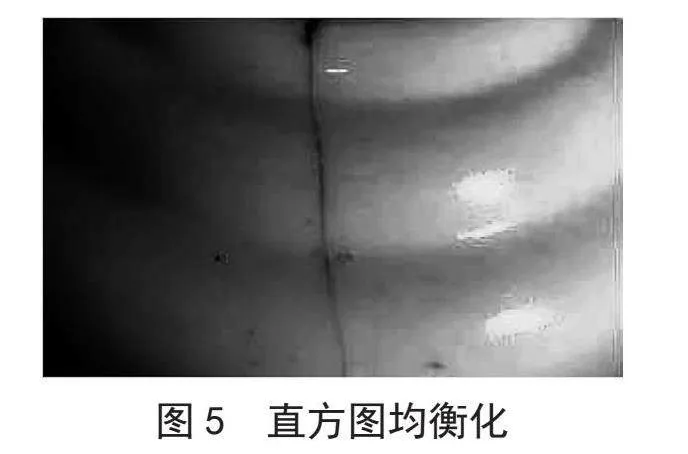
1.3 直方图均衡化增强
图像的灰度直方图能够显示图像中包含的灰度像素数目,反映各灰度级的发生频率。对灰度直方图进行均衡处理,可使图像更清晰地显示,为后续的图像处理提供依据。直方图均衡化方法的基本思路是依据图像灰度的概率分布设定对应的灰度值,并且通过扩大图像范围的方式来增强其对比度。
直方图均衡化的基本原理是通过灰度级概率密度函数求出灰度转换函数,从而自动调节图像对比度。其中,原图像的概率密度函数p(rk)和变换函数T(r)之间的关系为:
其中,T(r)满足0≤T(r)≤1。
应用于数字图像处理中的离散形式:
直方图均衡化处理的步骤如下:
1)获取原图像的直方图pr(rk)。
2)用累计分布函数处理获取的灰度直方图,经过处理后会得到新的灰度。
3)在近似处理的基础上,用变换后得到的新灰度值代替旧的灰度值,再将所有灰度值相同或相差较小的各灰度直方图合并在一起便可得到ps(s)。
图2(a)经直方图均衡化后的图像如图5所示。
1.4 图像滤波增强
任何图像在采集、处理和传输的过程中,难免会受到各类噪声(如量化噪声和椒盐噪声等)的干扰。在对图像进行处理之前,特别是对检测精度有较高的要求时,这些噪声的干扰将会影响检测的结果及后续对图像的处理与分析[10]。因此,图像滤波去噪是图像处理中必不可少的一环,本文主要采用中值滤波和高通滤波进行缺陷图像增强。
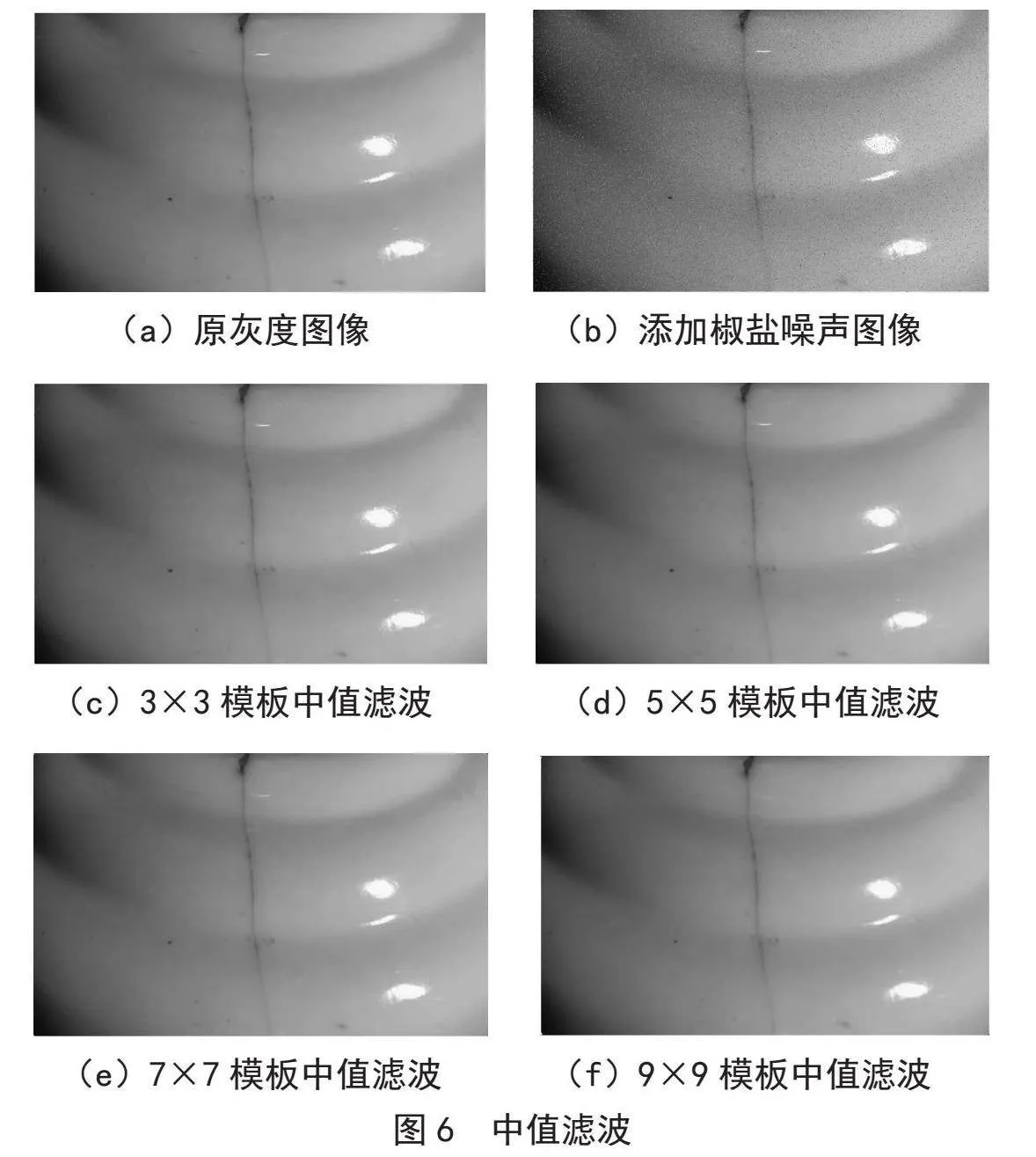
1.4.1 中值滤波
中值滤波可以有效去除诸如椒盐噪声和脉冲噪声之类的孤立噪声,而且其在滤波过程中能够保持图像的边缘特性。其基本原理是在图像某点邻域中找出该邻域像素的中值作为这一点的像素值,简单来说,就是在以每个像素点为中心的N×N奇数方块内找到所有像素的中值,然后将该中值赋给对应的像素点[11]。这样就可以有效去除噪声,同时保持图像的细节特征。
具体去噪步骤如下:
1)移动N×N奇数窗口,然后将图中某个像素位置与模板中心重合。
2)读取模板下的像素灰度值并对这些值进行顺序排列。
3)选取排序后位于中间的像素。
4)将选取的中值赋给模板中心位置的像素。
原图像中值滤波后的图像如图6所示。
1.4.2 梯形高通滤波
图像的边缘和细节位于高频部分,所以通过高通滤波器能够消除模糊,突出边缘。梯形高通滤波器的定义为(设D1>D0):
其中,D0表示截止频率,D(u,v)表示频率矩形中心与频率域中点(u,v)的距离。原图像通过梯形高通滤波后的图像如图7所示。
1.5 图像边缘检测
边缘检测的主要目的是找到图像中亮度显著变化的点,并在检测过程中去除有干扰的点,达到减少检测数据量的目的,这在一定程度上保留了图像的结构属性。一般情况下,当酒瓶存在缺陷时,缺陷部分的灰度与正常瓶子图像有所不同。缺陷显示的灰度值偏小,在图像中就会形成缺陷轮廓信息,故利用边缘检测可以检测出酒瓶的裂纹。利用Prewitt算子和Canny算子进行边缘检测,经检验可知,两种算子的处理效果较好。
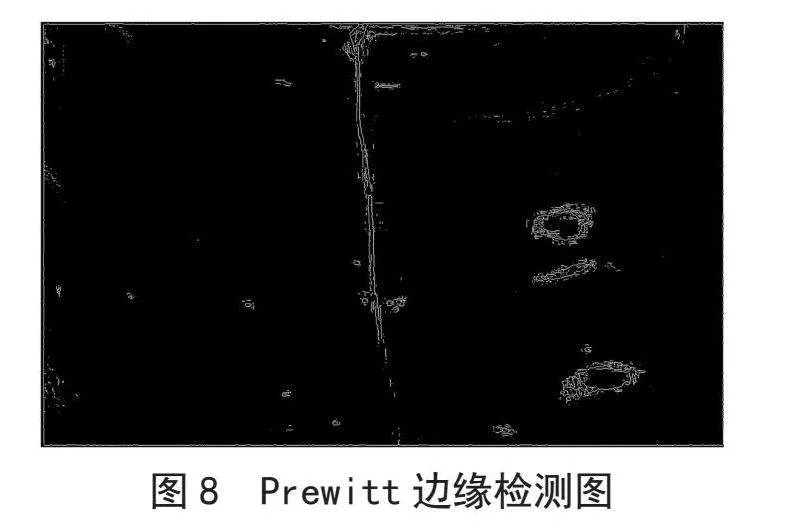
1.5.1 Prewitt算子边缘检测
Prewitt算子主要是利用上下像素、左右相邻像素之间的灰度级差异,在边缘处达到极值以识别边缘并去除一些假边缘,同时可以去除噪声,增加图像清晰度。其原理主要是使用检测水平边缘的模板和检测垂直边缘的模板与原图像进行邻域卷积。该算子定义如式(5)所示:
其中,G(i,j)表示梯度的大小,f (i,j)表示图像中各像素的灰度值,Prewitt算子所对应的卷积模板如式(6)所示:
利用Prewitt算子检测原图像的灰度图后得到的图像如图8所示。
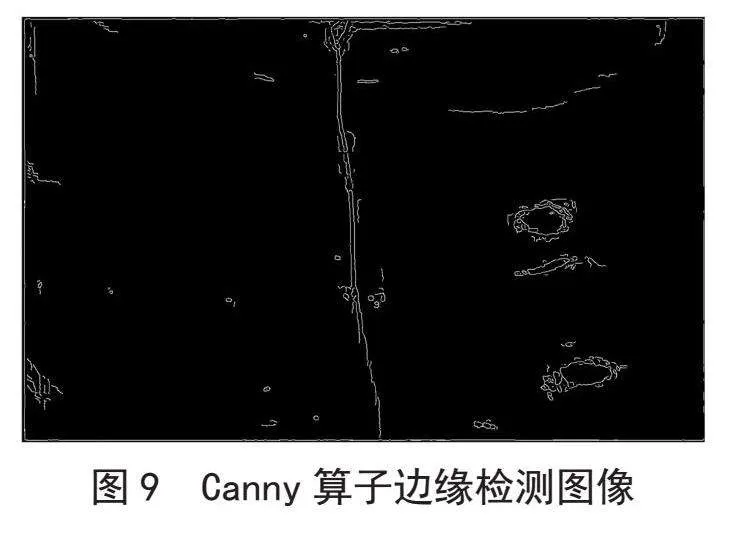
1.5.2 Canny算子边缘检测
Canny边缘检测的主要原理是先选择合适的高斯滤波器,用于图像平滑处理,减少噪声对边缘检测的干扰,然后采用非极值抑制技术进行处理得到图像边缘,步骤如下:
1)采用高斯滤波器平滑图像,其中高斯函数H(x,y)为:
其中,f (x,y)表示图像数据,G(x,y)表示高斯函数,σ表示标准差。
2)采用一阶偏导的有限差分计算梯度的幅值和方向。利用一阶差分卷积模板:
幅值:
方向:
使用非极大值抑制技术处理梯度幅值。取得图像全局的梯度值并不意味着已经得到图像的边缘,要想获得图像的边缘首先得将非局部梯度幅值的极大值点置零,然后保留其局部的最大值点,这样才能最终得到被细化后的边缘。具体方法为:先设每一点邻域的中心像素梯度值为M,然后比较M与该点梯度线上两个像素的梯度值,若这两个梯度值比M小,则令M = 0。
双阈值算法是一种常用的图像处理技术,用来检测和连接边缘,其基本原理是利用T1和T2两个不同大小的阈值(其中T2大于T1)对图像进行处理,得到两个阈值边缘图像N1[i,j]和N2[i,j],然后利用双阈值法将N2[i,j]图像边缘连接成轮廓,当到达轮廓的端点时,该算法就在N1[i,j]的邻点位置搜索可与轮廓相连的边缘。经过多次重复操作,双阈值算法不断地在图像N1[i,j]中搜索图像边缘,直至将图像N2[i,j]连续起来[12]。Canny算子检测原图像的灰度图后得到的图像如图9所示。
2 茅型瓶裂纹缺陷识别
经过一系列的预处理,去除了噪声的干扰,使图像变得更加清晰,增强了目标区域的对比度,同时提高了识别的准确度。在预处理的基础上运用Hough变换对茅型瓶裂纹缺陷进行识别。Hough变换最初只能用于检测直线,经过改进后,Hough变换不仅能识别直线,还可以识别复杂结构。针对茅型瓶裂纹缺陷,利用边缘检测描绘出裂纹形状,然后通过Hough变换对裂纹进行识别。主要步骤如图10所示。
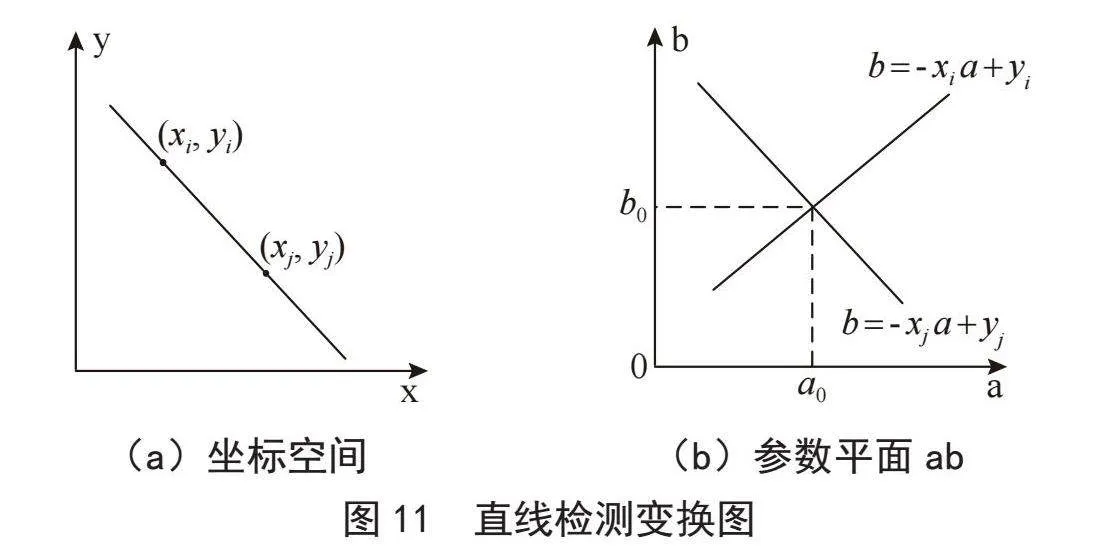
2.1 Hough变换直线检测原理
在图像xy坐标空间中,经过点(xi,yi)的直线表示为:
其中,参数a表示斜率,b表示截距。
坐标空间中,经过点(xi,yi)的直线可能会有无数条,但对应不同的参数a和b,它们都会满足式(13)。现以参数a和b作为变量,而将xi和yi视为常数,则式(13)可表示为:
从而转化为参数平面ab,这种变换便称为Hough变换。如前所述,经过点(xi,yi)的空间直线方程在经过变换后便可得到该点在参数空间中的唯一方程。同理可得,经过点(xi,yi)的同一条直线上的另一点(xj,yj),该点在变换到参数空间中也有唯一的方程与之对应,其可表示为:
通过观察可知,上述两条直线在参数空间中相交于一点(a0,b0),如图11(b)所示。
综上可知:图像坐标空间中的一条直线,在通过上述方法将该直线由坐标平面变换到参数平面后,其直线上的每个点在参数平面ab上都有相应的一条直线与之对应,这些参数直线在参数平面ab中都会交于点(a0,b0)。反之可得,所有在参数空间中相交于同一点的直线,都可以在坐标空间中找到一条共线的点与之相对应。由此可得,只要找到所求形状的一些边缘点,就能利用Hough变换来确定连接这些点的直线方程。
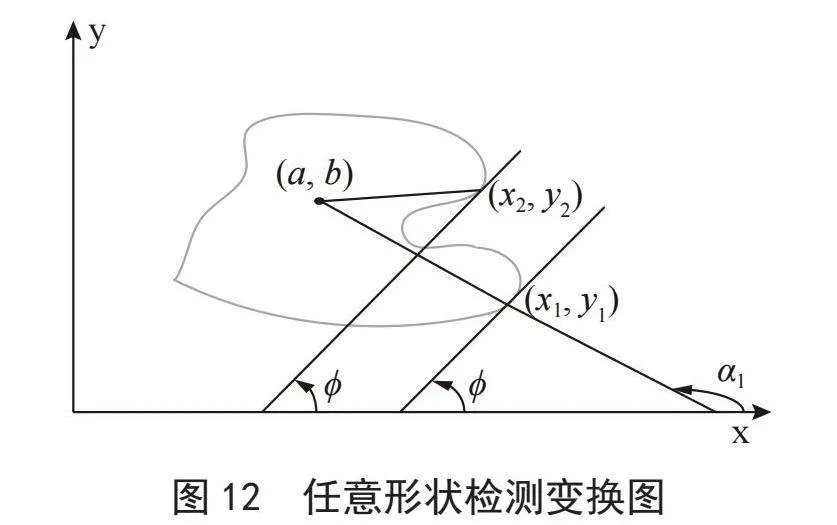
2.2 Hough变换复杂形状检测原理
Hough变换不仅能用于检测直线,还可以用于检测复杂形状的边界。其主要原理是:在被检测的图像中任意选取参考点(a,b),计算该形状边缘上每个点的切线方向φ,与参考点(a,b)位置的偏移矢量r,以及r与x轴的夹角α,如图12所示。
参考点(a,b)的位置可由下式计算得出:
其中,ϕ表示梯度角。
检测步骤如下:
1)在知道物体形状的前提下,首先计算出每个边缘点的梯度角ϕi,然后算出每个梯度角ϕi与参考点的距离ri和角度ai,将所有梯度角ϕi的对应角度和距离编成一个表,便可将被检测的边缘形状编写成一个参考表。如果同一个梯度角ϕ对应两个点,则参考表可表示为:
2)在参数空间中建立一个二维累加器数组,累加器数组初值设为0,然后计算被检测形状边缘上每点对应的梯度角,最后由式(16)和式(17)计算出可能参考点的位置,每求得一个可能的参考点,对应的累加器数组元素A(a,b)加1。
3)所有可能的参考点都被计算出来后,需要求出的参考点便是累加器数组A(a,b)最大值所对应的(a,b)的值。参考点被找到后,整个物体的边界便可被确定。
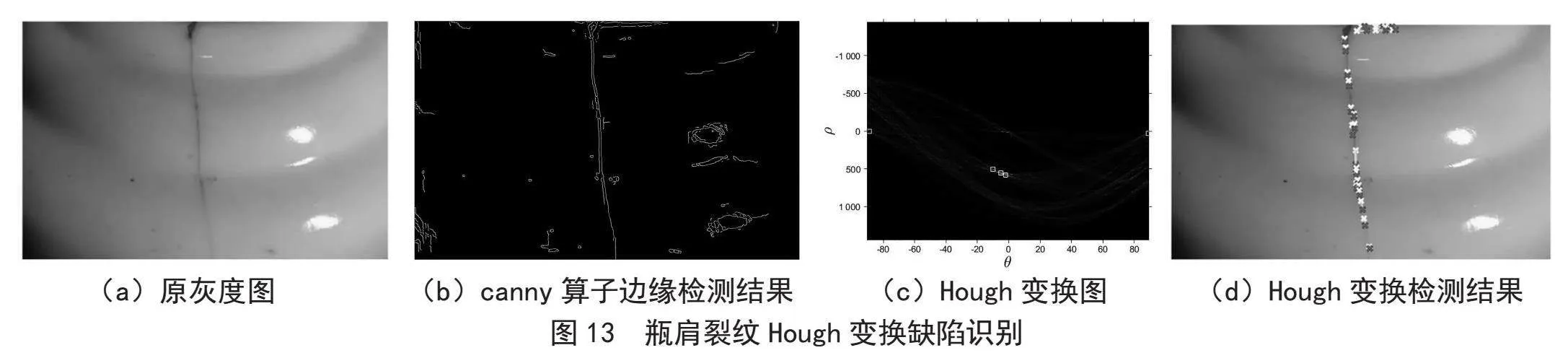
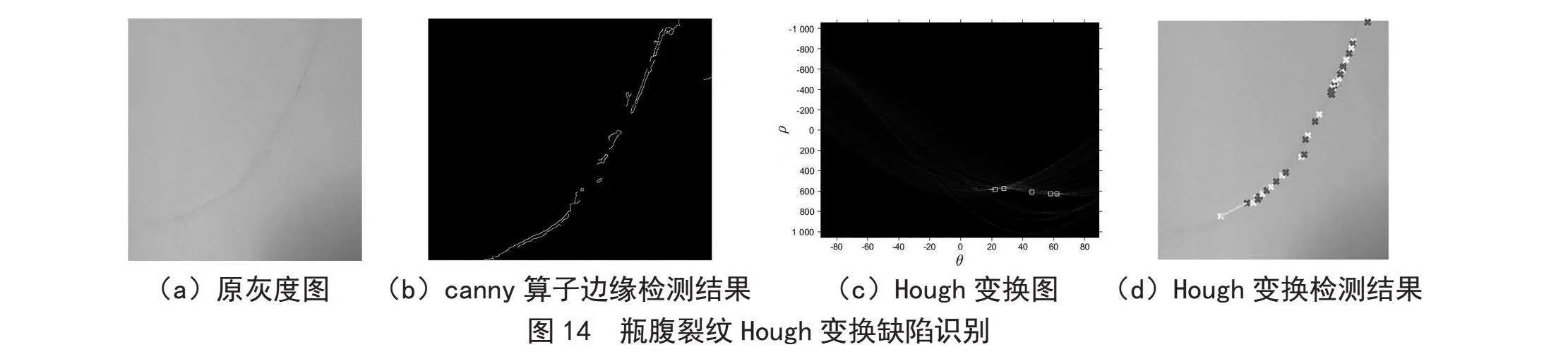
2.3 茅型瓶裂纹缺陷Hough变换检测结果
在茅型瓶裂纹缺陷图像经过边缘检测等预处理的基础上使用Hough变换进行识别,结果如图13(d)和图14(d)所示。
3 结 论
利用MATLAB图像处理技术对茅型瓶裂纹缺陷进行识别,首先对缺陷图像进行灰度化、直方图均衡化,采用中值滤波和梯形高通滤波进行去噪,使用Prewitt算子和Canny算子进行边缘检测,然后使用Hough变换对增强后的图像进行缺陷识别,采用瓶肩和瓶腹两个不同位置和形状的裂纹缺陷图像进行验证,结果表明Hough变换能够有效检测不同形状和位置的茅型瓶裂纹缺陷。
参考文献:
[1] 史浩然.基于机器视觉的汽车发动机高压油路密封件表面缺陷检测 [D].吉林:长春大学,2021.
[2] 陈雨杨.玻璃瓶缺陷和瓶底模号的识别与分类研究 [D].成都:成都理工大学,2020.
[3] 陈常祥.基于计算机视觉的玻璃瓶缺陷在线检测系统的研究与实现 [D].桂林:广西师范大学,2007.
[4] 张晓军.玻璃瓶缺陷计算机自动检测系统的实现 [D].成都:电子科技大学,2009.
[5] LIU H J,WANG Y N,DUAN F. An Empty Bottle Intelligent Inspector Based on Support Vector Machines and Fuzzy Theory [C]//Intelligent Control and Automation, 2006. WCICA 2006. The Sixth World Congress on. Dalian:[s.n.],2006:9739-9743.
[6] YANG Z F,BAI J Y. Vial Bottle Mouth Defect Detection Based on Machine Vision [C]//2015 IEEE International Conference on Information and Automation. Lijiang:IEEE,2015:2638-2642.
[7] ZHOU W J,FEI M R,ZHOU H Y,et al. A Sparse Representation Based Fast Detection Method for Surface defect Detection of Bottle Caps [J].Neurocomputing,2014,123:406-414.
[8] DUAN F,WANG Y N,LIU H J,et al. A Machine Vision Inspector for Beer Bottle [J].Engineering Applications of Artificial Intelligence,2007,20(7):1013-1021.
[9] ZHOU X E,WANG Y N,XIAO C Y,et al. Automated Visual Inspection of Glass Bottle Bottom With Saliency Detection and Template Matching [J].IEEE Transactions on Instrumentation and Measurement,2019,68(11):4253-4267.
[10] 崔福彬,张茜,雷俞承志,等.基于深度学习的SAR图像目标识别算法 [J].长春理工大学学报:自然科学版,2019,42(4):33-36.
[11] 程芳.基于改进中值滤波方法对图像去噪的应用研究 [J].电脑与信息技术,2022,30(6):18-20.
[12] 赵彻,徐熙平.图像处理技术在微小尺寸自动测量中的应用 [J].电子测试,2014(7):110-111.
作者简介:邱旭(1989—),男,汉族,贵州遵义人,助教,硕士研究生,研究方向:机器视觉、无损检测、图像处理。