基于STM32F103C8T6光电跟踪的多功能太阳能光伏花
2024-09-19 00:00:00严立政湛顺钞邓涛戴书恒马艺玮
现代信息科技 2024年13期


摘 要:为充分利用新能源并解决景区照明能耗高、观赏性低、光源固定等问题,设计一种基于STM32F103C8T6光电跟踪的多功能太阳能光伏花。采用光电跟踪法收集尽可能多的太阳能并将其转换为电能储存在锂蓄电池中,以为装饰灯和其他模块供电。同时,设计了L298N电机驱动模块,控制受光模块与小车以反方向转向运动,解决由小车方向导致太阳能电池板同向运动的问题。用户可通过蓝牙控制光伏花的开花、闭花和移动。在相同环境下分别测试了视日轨迹跟踪和光电跟踪对太阳能的吸收效率,结果表明光电跟踪法在成本控制和对太阳能的吸收效率上表现更优。利用光电跟踪法可充分利用太阳能,不易受突发天气影响。
关键词:太阳能光伏花;光电跟踪;L298N模块;过充过放保护
中图分类号:TP368 文献标识码:A 文章编号:2096-4706(2024)13-0176-06
Multi-functional Solar Photovoltaic Flower Based on STM32F103C8T6 Photoelectric Tracking
YAN Lizheng, ZHAN Shunchao, DENG Tao, DAI Shuheng, MA Yiwei
(School of Automation, Chongqing University of Posts and Telecommunications, Chongqing 400065, China)
Abstract: To fully utilize new energy and solve the problems of high lighting energy consumption, low ornamental value, and fixed light source in scenic areas' lighting, a multifunctional solar photovoltaic flower based on STM32F103C8T6 photoelectric tracking is designed. It uses photoelectric tracking method to collect as much solar energy as possible and convert it into electrical energy for storage in lithium batteries to power decorative lights and other modules. At the same time, an L298N motor drive module is designed to control the light receiving module and the car to move in the opposite direction, solving the problem of the solar panel moving in the same direction caused by the car's direction. Users can control the flowering, closing, and movement of photovoltaic flowers through Bluetooth. The absorption efficiency of solar energy by visual trajectory tracking and photoelectric tracking are tested separately in the same environment, and the results indicate that the photoelectric tracking method performs better in cost control and absorption efficiency of solar energy. The use of photoelectric tracking method can fully utilize solar energy and is not easily affected by sudden weather events.
Keywords: solar photovoltaic flower; photoelectric tracking; L298N module; overcharge and discharge protection
0 引 言
为了应对能源危机和环境问题,我国提出了“双碳目标”[1],旨在通过减少温室气体排放从容应对气候变化和环境污染问题,大力推动清洁能源的发展。由于太阳能具有清洁、可持续、可再生等优势[2],一直被视为重要的能源来源,有越来越多的太阳能产品走入人们的生产和生活。大多数风景区远离城市,传统电力供应方式需要铺设大量电缆,存在一定的困难,但这些风景区往往拥有丰富的太阳能资源,为此本文设计一种基于STM32F103C8T6光电跟踪技术的多功能太阳能光伏花,作为一种创新的供电解决方案。
目前,许多学者和研究人员已经对基于单片机的太阳能自动跟踪系统进行了广泛的研究,力争最大程度收集太阳能。文献[3]分析了光电跟踪法、视日跟踪法、视日跟踪法和光电跟踪法相结合3种太阳能跟踪方法。文献[4]对比分析了视日跟踪法和光电跟踪法,视日跟踪法精度高、灵敏性好且不易受外界环境影响,但传感器成本高昂,不适用于小型太阳能利用装置。文献[5]对光电跟踪法和视日跟踪法进行了优缺点对比分析。光电跟踪法直接根据光照强度的变化来调整太阳能板,这种方法成本较低、简单易行,但在光照强度变化较快的情况下存在较大误差。文献[6]的研究表明视日跟踪法具有较高的精度和准确性,但计算复杂,需要较强的计算能力。文献[7]对比了两种算法在不同使用场景下的太阳能跟踪效率,若场景不同,应择优采用。文献[8]分析了当前小型太阳能跟踪装置大多应用在充电宝、台灯、计算器等单一功能的应用场景。文献[9]为解决以传统方式向风景区输送电力成本高的问题,并且能够充分利用风景区丰富的太阳能资源,提出设计开发“多功能”太阳能光伏花。
以上文献对多种太阳能跟踪算法进行了研究,但缺少跟踪算法的实际应用。因此,本文设计开发了风景区多功能太阳能光伏花,采用最佳算法最大程度采集太阳能,并将电能储存在蓄电池中,以便日后为装饰灯和其他功能模块供电。此外,本文还设计了基于L298N电机驱动模块的蓝牙控制APP,借助HC-05蓝牙通信模块,用户可以通过APP实现与STM32单片机的通信,从而实现远程控制光伏花的移动。
1 太阳能光伏花的设计方案
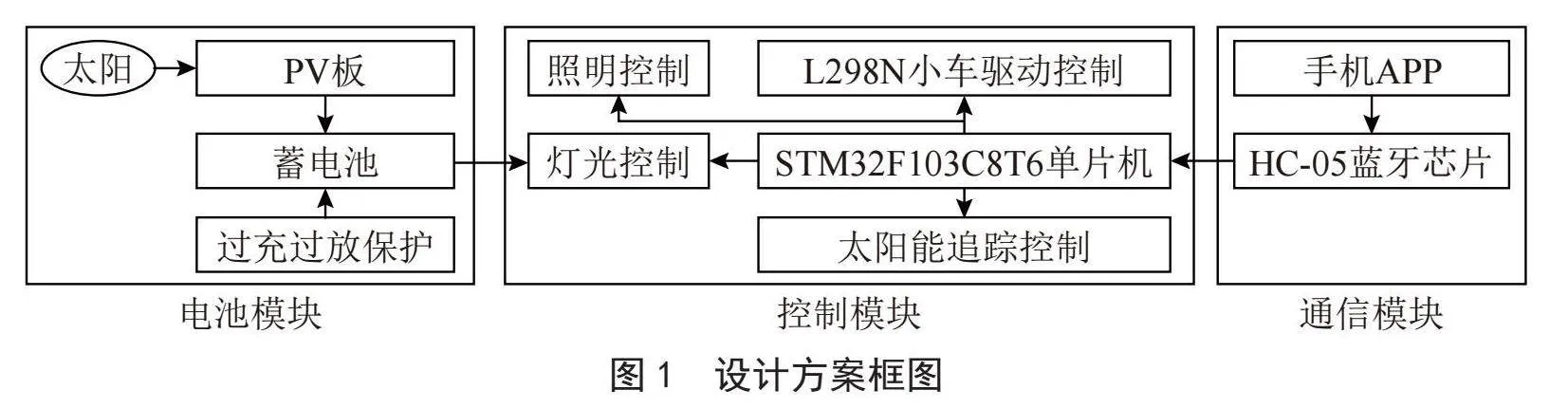
太阳能光伏花主要包括太阳能追踪、照明、小车驱动等多项功能,利用基于STM32微控制器的小车进行运作,太阳能电池板上的光敏电阻检测光照强度,当光强大于预设阈值时,光伏板将打开追踪光源并进行电力供应;当光强小于预设阈值时,太阳能光伏板将关闭,开通照明系统。系统总体设计方案如图1所示。
1.1 电池模块
电池模块由蓄电池、PV板和过充过放保护组成。当太阳光照射PV板时,PV板将采集的电能运输至蓄电池内,蓄电池开始充电,并由过充过放保护装置进行保护,一旦蓄电池内电压高于或低于预设值,保护电路就会发挥作用,阻断电池的充放电。
1.2 控制模块
通过灯光控制与电池模块的连接,STM32F103C8T6单片机作为控制中心,它能直接控制照明、太阳能追踪装置、小车驱动等多项功能,体现了产品的多功能性。
1.3 通信模块
通过蓝牙芯片与单片机相连,可以向单片机发送信号,实现小车驱动的功能。手机APP负责发送小车状态指令,通过蓝牙芯片将指令发送到单片机上进行解码,然后控制驱动模块使小车运动。
2 太阳能光伏花硬件设计
2.1 太阳能追踪
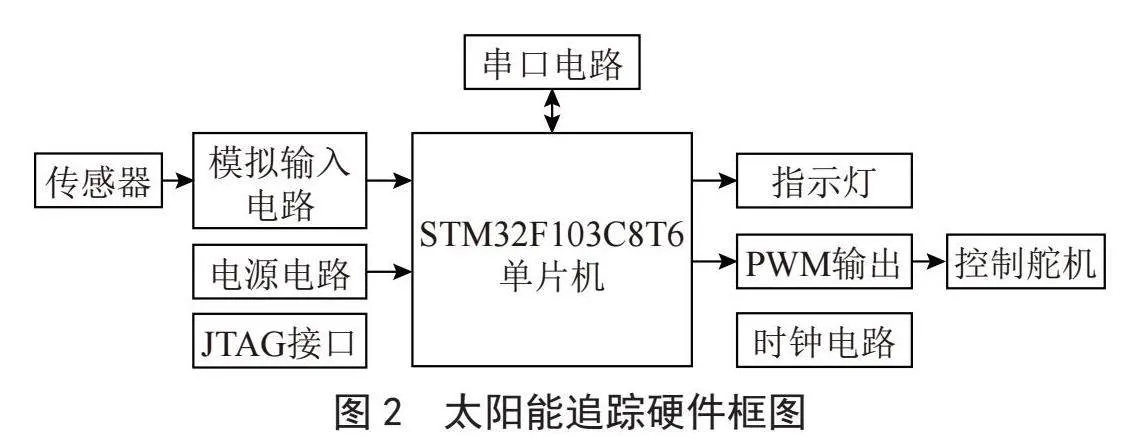
太阳能追踪硬件框图设计如图2所示,采用的主要部件是STM32F103C8T6单片机。
在太阳能跟踪器上安装两个光敏电阻(阈值可调),单片机实时监测两个光敏电阻输出端的输出情况。以正常天气下午6点钟的光照强度作为阈值,此时的太阳光微弱不需要采集。当光照强度比阈值高时,光敏电阻将向输出端输出高电平,反之则向输出端输出低电平。
选用SG90舵机作为调节驱动装置,通过接收单片机控制模块输出的开关量信号来控制正反转,由光伏电板及太阳位置判断模块的偏转。使用电动二维云台实现太阳能跟踪器全方向旋转,云台由蜗杆、蜗轮、传动轴、传动轴安装板、方位角旋转装置、安装座、轴承板等元件组成,可以起到水平方向旋转和调整俯仰角的作用。由于垂直方向上的调整效果不理想,故而添加两个步进电机进一步提高精准度。
太阳能跟踪器的控制核心采用的是STM32系列核心单片机,STM32系列产品具有超低功耗的ARM Cortex-M4处理器内核,采用意法半导体独有的节能技术[10]。同时STM32单片机配备多个调试和测试接口(如JTAG接口),方便开发者进行调试和测试。目前市场上的STM32单片机功能板较为成熟,因此,本文采用STM32F103C8T6小型系统板作为控制核心。
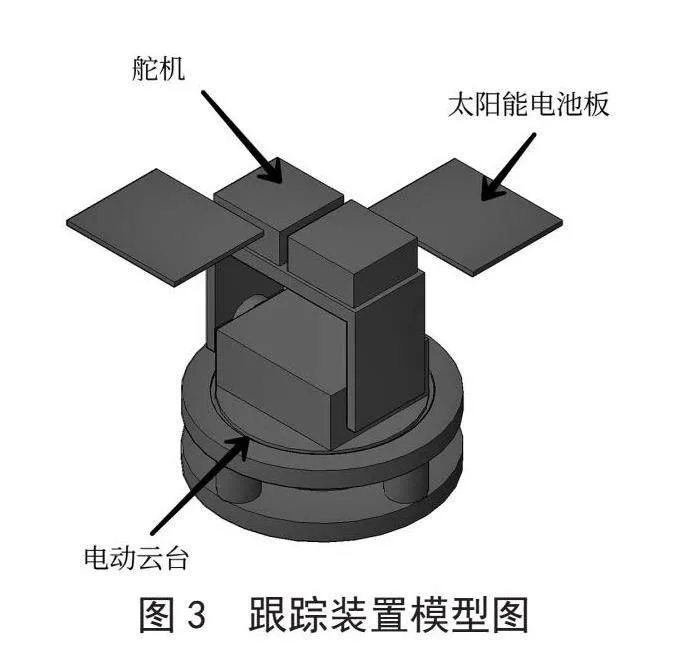
跟踪装置模型图如图3所示,由电动二维云台和两个舵机组成,太阳能电池板旁边装有两个光敏电阻,可以根据光的强度和方向调整水平方向旋转角度和俯仰角。当需要运动时,云台的圆形底盘首先旋转,之后方位角旋转装置开始运动,适当调整步进电机的俯仰角。由于蜗杆和蜗轮具有自锁特性,可以防止反向运动,提高了方位角旋转装置的精度。
2.2 锂蓄电池
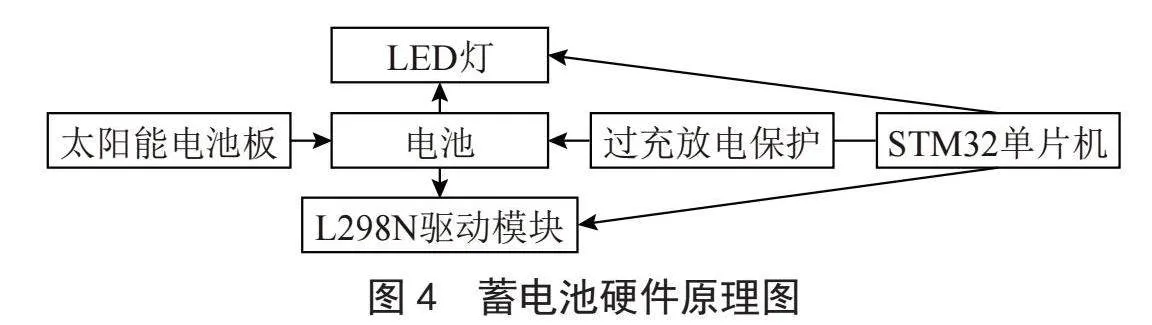
锂蓄电池在太阳能光伏系统中扮演着能量储存与安全管理的主要角色。电池硬件原理如图4所示。
2.2.1 电池充电原理
以STM32F103C8T6单片机为控制中心,对太阳能电池板和锂电池进行电压采样,再通过单片机上的AD转换将太阳能转化为化学能储存在锂电池内。用电池保护电路解决电池安全问题。电池保护电路通常由驱动IC控制MOSFET器件的导通或关断,从而避免锂电池出现过充、过放、过流或过温的情况[11]。
2.2.2 过充电保护原理
当锂电池处于充电状态时,电路中保护IC取样电池电压,电压达到4.2 V时激活过充保护,将MOS管关断,整个回路被关断,截止充电起到保护电路的作用。另外,因噪声产生的误动作也是要多加注意的,以免判定为过充保护,因此需要进行延迟时间的设定,而延迟时间也不能短于噪声持续的时间。
2.2.3 过放电保护原理
当锂电池处于放电状态时,保护IC通过采集电池电压进行监视,当电压低于3.0 V时发出指令,让MOS管截止,回路断开,以避免电池过度放电,从而起到保护电路的作用。
2.3 小车的电机驱动模块
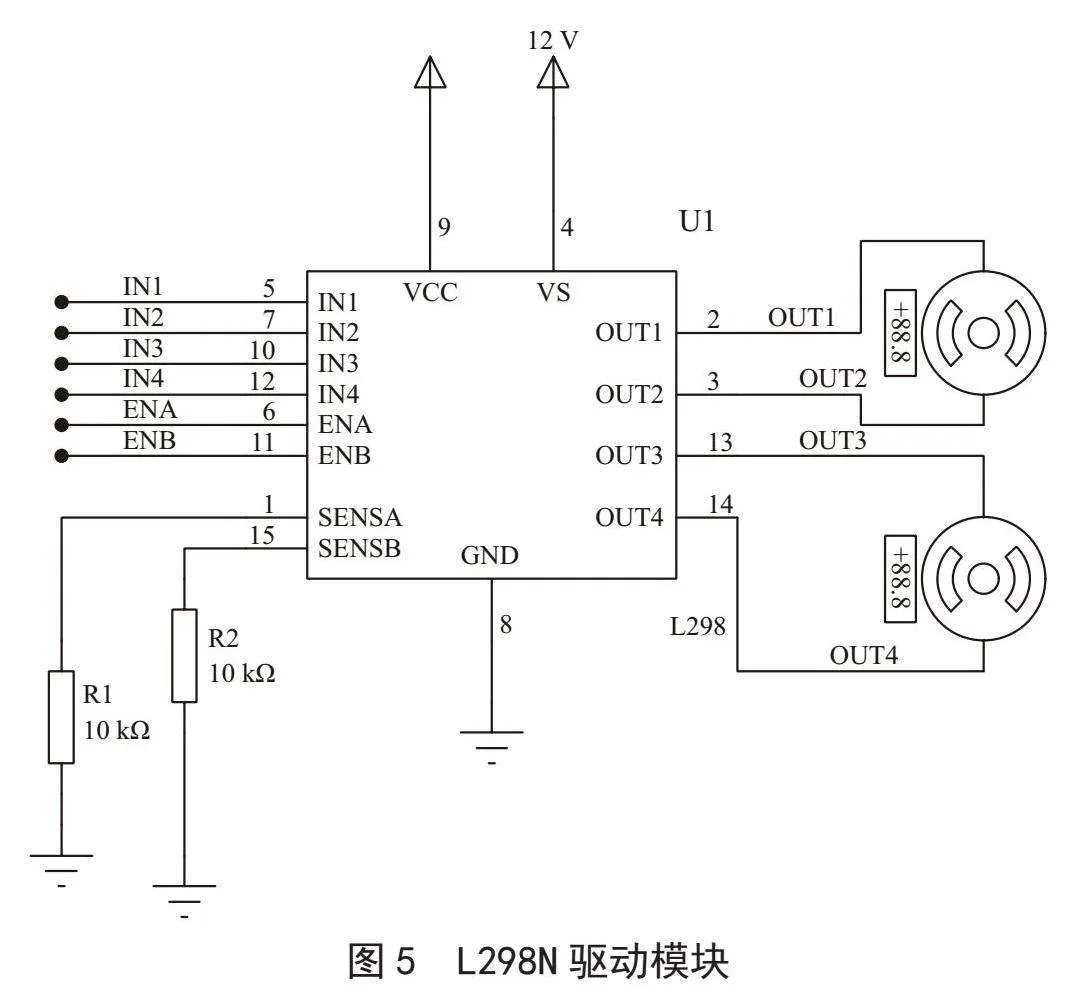
L298N驱动模块的原理图如图5所示。
该模块由L298N芯片、输入引脚、输出引脚、直流电机等部件组成。芯片左侧的IN1、IN2、IN3、IN4、ENA、ENB引脚是输入引脚,用于连接单片机。芯片右侧的OUT1、OUT2、OUT3、OUT4引脚是输出引脚,用于连接直流电机。输入引脚的电平高低与电机转动状态和小车运动状态的关系如表1所示。
由表1可知,IN1和IN3引脚高电平且IN2和IN4引脚低电平时,左、右两个电机都正向转动,小车处于前进状态。IN1、IN3、IN4引脚均为高电平且仅IN2引脚为低电平时,左电机正向转动,右电机停止转动,小车向右转;IN1、IN2、IN3引脚均为高电平且IN4引脚为低电平时,右电机正向转动,左电机停止转动,小车向左转;IN2和IN4引脚为高电平且IN1和IN3引脚为低电平时,左、右两个电机均反向转动,小车处于后退状态。
2.4 二极管LED灯
该模块由LED灯、继电器开关、光敏电阻等组成,由锂蓄电池直接供电。设计将通过光敏电阻检测光照强度的阀值设定为3l ux。当光照强度>3l ux时,光敏电阻将收到的光信号输入STM32单片机中,继电器打开,蓄电池模块供电,LED发光。当光照强度<3l ux时,继电器吸合,灯光熄灭。为防止二极管LED灯亮起时对光敏电阻带来误差,设计将LED灯安装在整个装置底部,这样对顶端太阳能板不会产生影响。
2.5 小车的蓝牙通信模块
设计采用HC-05蓝牙模块进行通信,HC-05是主从一体化的蓝牙串口模块,主从可指令切换,指令少,功能稳定,且使用简单,建立连接后方可接收数据信号[12]。在手机与智能小车建立蓝牙连接后,用户通过手机APP向小车发出开花、闭花和移动指令。蓝牙模块接收到指令后,在主程序的控制下解析指令,随后将识别的指令传递STM32到单片机上,再由单片机控制L298N驱动控制模块,带动小车执行指令。蓝牙通信模块通过串口与STM32微控制器进行数据传输和通信。
3 太阳能光伏花软件设计
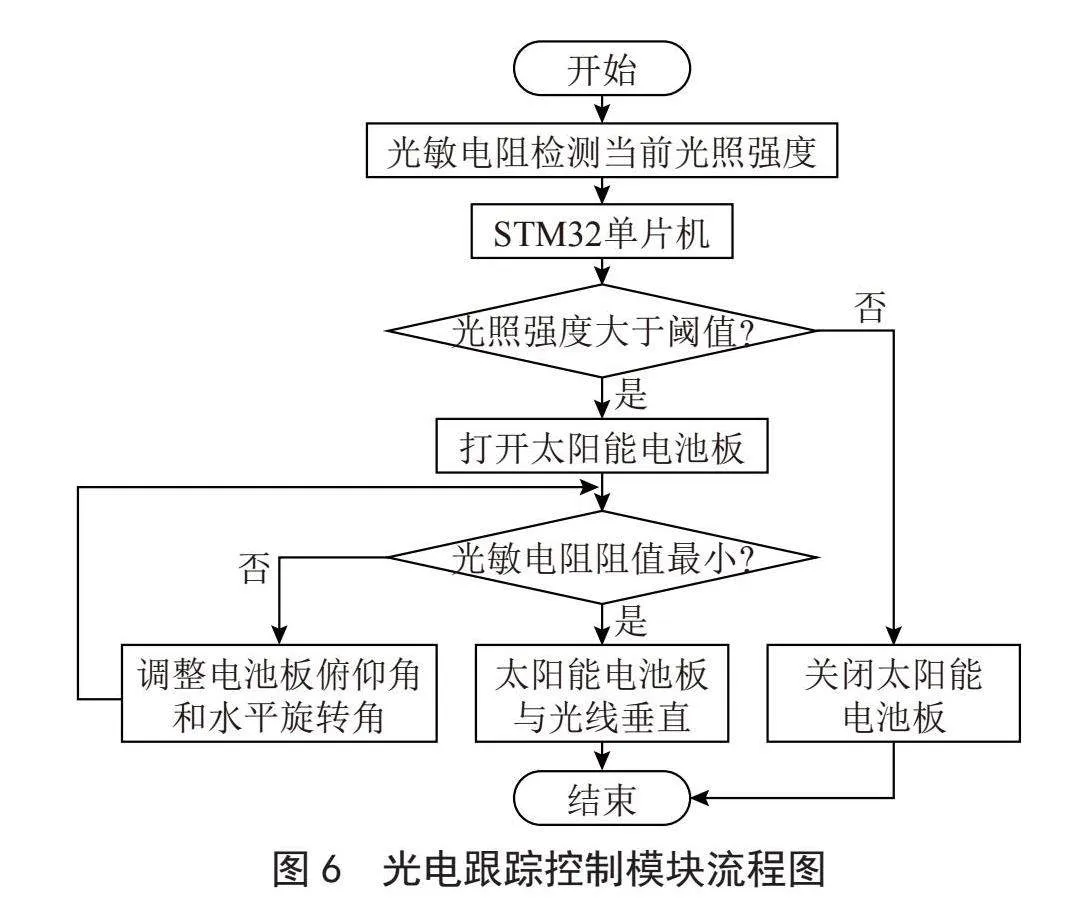
3.1 光电跟踪控制模块
光电跟踪控制模块流程图如图6所示。该模块利用光敏电阻检测环境光照强度,将检测结果转换为电信号后输入到STM32微控制器中。微控制器根据输入的电信号来控制太阳能光伏板的工作状态。当光照强度高于预设阈值时,微控制器输出高电平信号,使太阳能光伏板开启;当光照强度低于预设阈值时,微控制器输出低电平信号,使太阳能光伏板关闭。光线与电池板表面垂直时,光敏电阻的阻值会达到最小,所以通过不断读取光敏电阻的阻值并观察其变化,可以判断出当前光线与电池板的角度关系。如果阻值逐渐减少,说明电池板正在接近与光线垂直的位置;如果阻值逐渐增加,则说明电池板正在偏离垂直位置。跟踪装置会根据光敏电阻的阻值变化来调整太阳能光伏板的水平旋转角度和俯仰角,直至阻值达到最小。
3.2 功能模块
蓄电池模块负责储存由太阳能光伏板产生的电力。系统所采用的高质量锂离子蓄电池,具有高能量密度、低自放电率和寿命长等特点[13]。同时,该模块结合了IC监视技术和MOS管关断技术。当蓄电池电压达到预设的过充阈值时,MOS管自动关闭,切断充电电路,以防止蓄电池因过度充电而受到损害。当蓄电池电压降至预设的过放阈值时,MOS管自动关闭,以防止蓄电池因过度放电而受到损害。
蓝牙通信模块通过蓝牙技术实现与手机的连接,用户可以通过手机APP(应用程序)实现对小车的远程控制。手机APP具备图形化界面,方便用户操作。此外,其还用于用户向太阳能光伏花发送开花、闭花、前进、后退、左转、右转控制指令。蓝牙通信模块通过串口与STM32微控制器进行数据传输和通信。
照明模块采用了基于光强传感的太阳能LED照明系统设计。首先,在系统中加入LED灯照明模块,该模块由LED灯、继电器开关、光敏电阻等组成[14]。其次,利用光敏电阻检测环境光照强度,并将检测到的电信号输入到STM32单片机中。最后,根据光照强度控制继电器的开关,实现LED灯的开关控制,即当光照强度低于阈值时,继电器吸合,LED灯打开,否则继电器断开,LED灯关闭。
3.3 手机APP程序设计
在实际设计中,首先将HC-05蓝牙模块设置为从机并将波特率设置为9 600,这样在整个装置正常运行时,手机才能通过蓝牙连接到装置。输入PIN码后,用户通过APP可实现向单片机输入指令远程操控光伏花。手机APP界面如图7所示。
4 实验结果验证
4.1 实物图
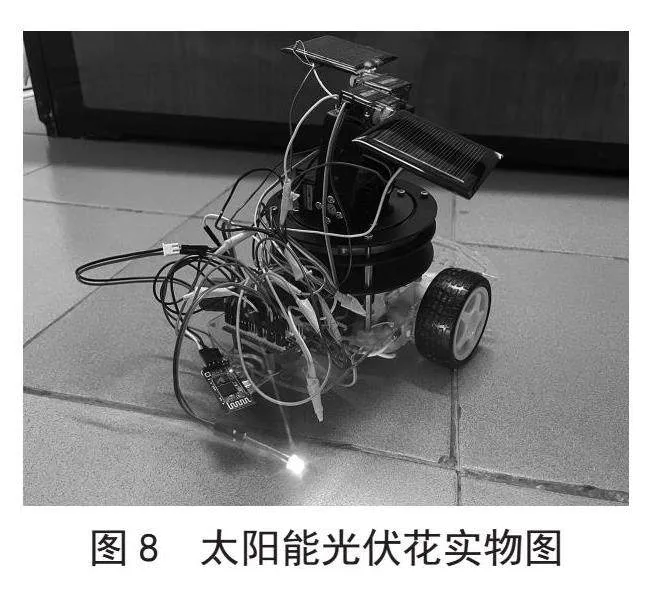
太阳能光伏花和装饰灯正常工作时的状态如图8所示。
图8中,光照强度处于1~5l ux区间,太阳能电池板在光敏电阻的调节下,根据舵机和云台的转动,不断追踪太阳能光的方向,以最大程度吸收太阳能。同时,光照强度低于灯光开启的阈值,因此需要打开灯光照明系统。
4.2 实验方案
2023年8月20日,在江苏盐城,将太阳能光伏花放置在某一空旷区域以采集太阳能。在6时打开光伏花,并在18时关闭太阳花。以0.5小时的时间间隔记录从6时到18时太阳能板的输出电压、输出电流、输出功率的实验数据。光伏花的一块太阳能板记录光电跟踪方式下的实验数据,另一块太阳能板记录视日轨迹跟踪法下的实验数据,比较两组数据,探讨两种跟踪方法在跟踪精度方面的优劣。实验过程中记录的数据如图8至图10和表2所示。
4.3 实验结果分析
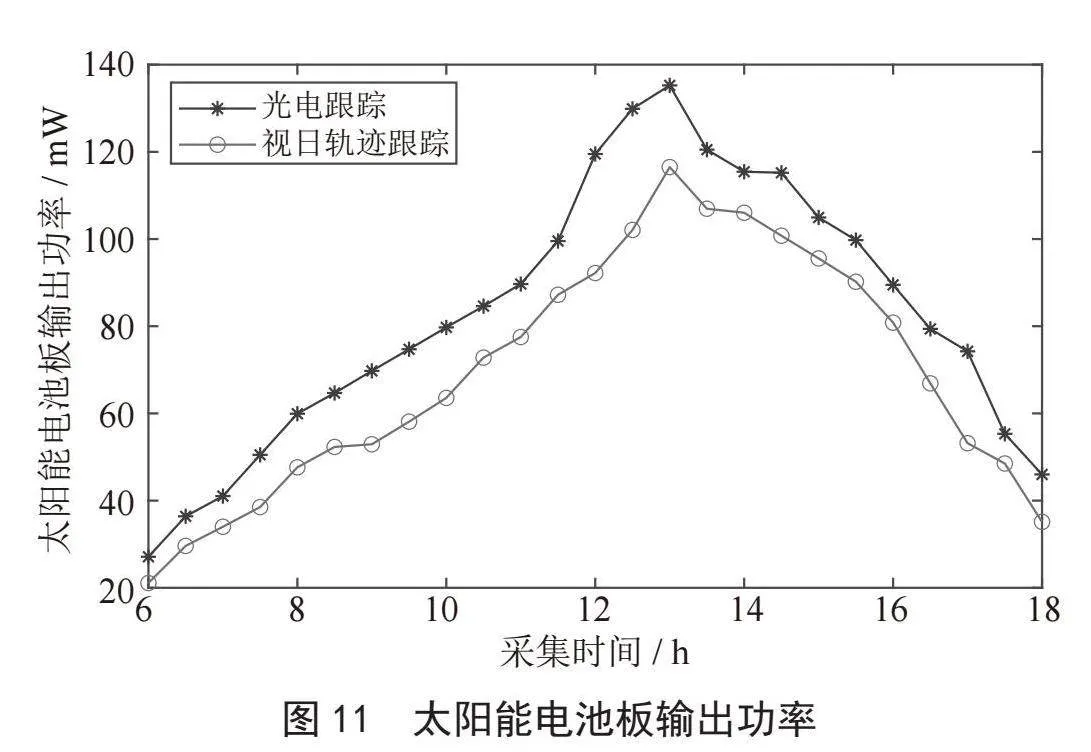
为了有效研究光电跟踪和视日轨迹跟踪两种方法在太阳能跟踪方面的精度,本文采用两块太阳能板,分别使用光电跟踪和视日轨迹跟踪作为太阳能跟踪算法进行对比实验,实验结果如图9至图11和表2所示。
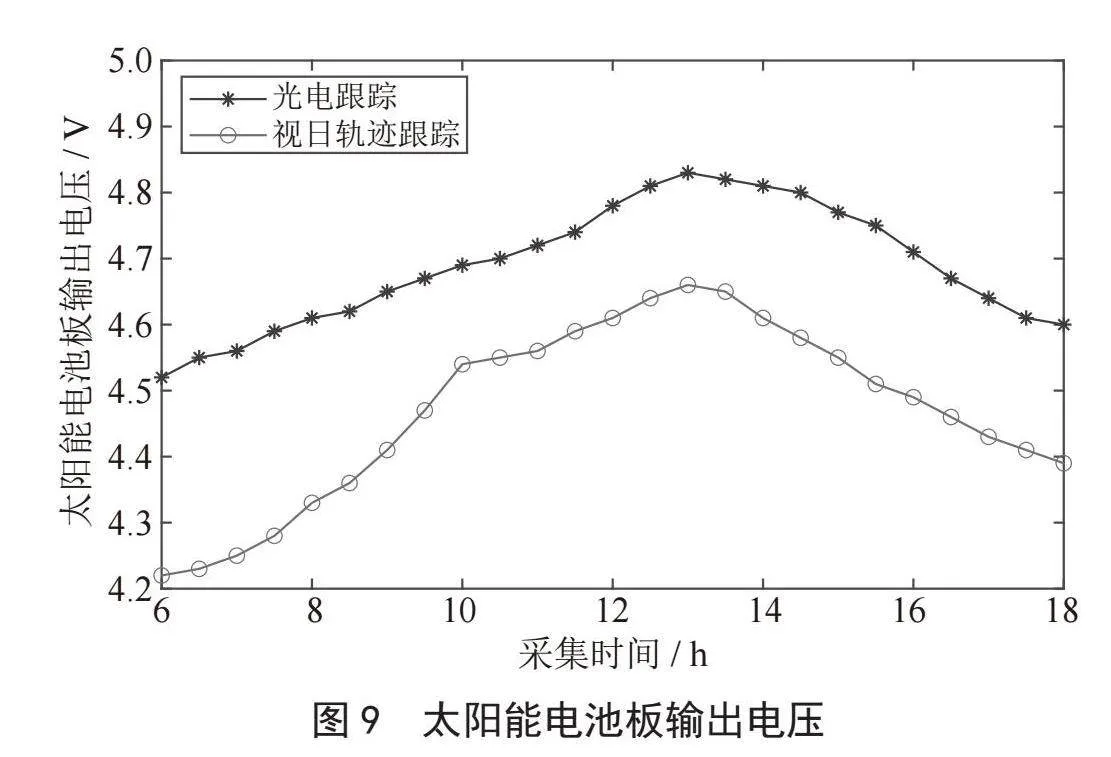
如图9所示,采用光电跟踪方法的太阳能光伏花装置的输出电压在4.52~4.83 V之间,采用视日轨迹跟踪法的太阳能光伏花装置的输出电压在4.22~ 4.66 V之间。两种跟踪方法下的输出电压曲线都是呈现先上升后下降的趋势,且最大值均出现在13时左右,但光电跟踪方法下的输出电压大于视日轨迹跟踪方法下的输出电压。
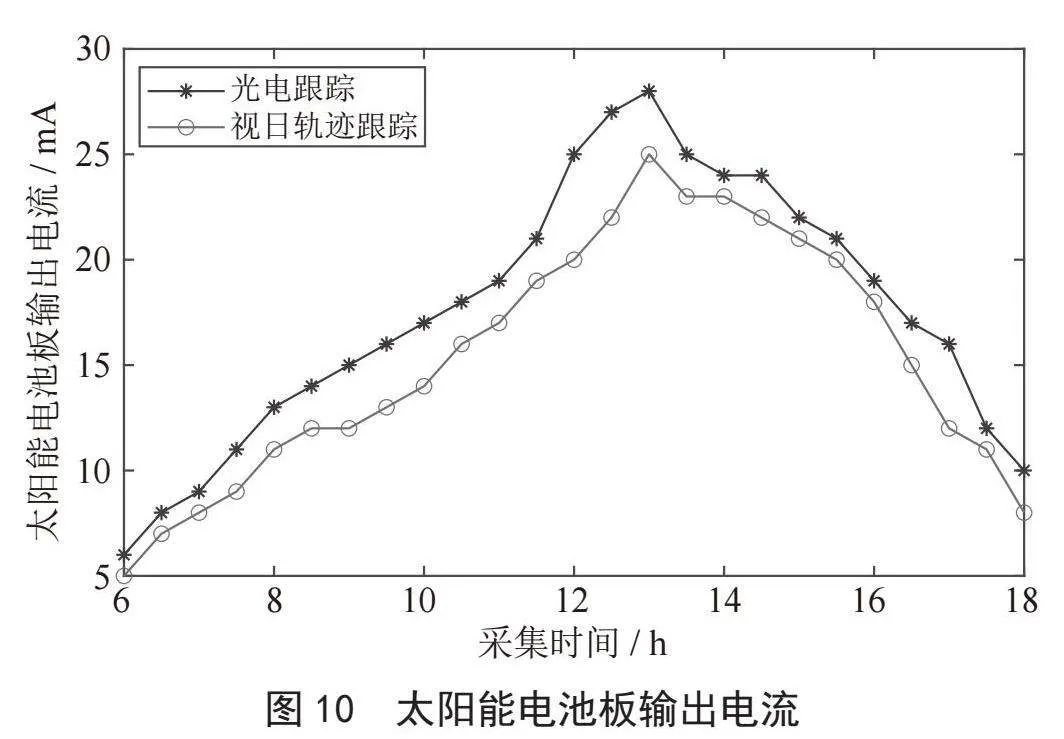
如图10所示,光电跟踪方法下输出电流的范围是6~28 mA,视日轨迹跟踪方法下输出电流的范围是5~25 mA。两种方法下的输出电流曲线变化规律相似,且最大值均出现在13时左右。光电跟踪方法下的输出电流依旧大于视日轨迹跟踪方法下的输出电流。
如图11所示,两种方法下输出功率的变化规律大致相同,但输出功率的数值大小有所不同。光电跟踪方法下的输出功率在27.12~135.24 MW之间,视日轨迹跟踪法下的输出功率在21.1~116.5 MW之间。同时,光电跟踪法下的输出功率仍然大于视日轨迹跟踪法下的输出功率。
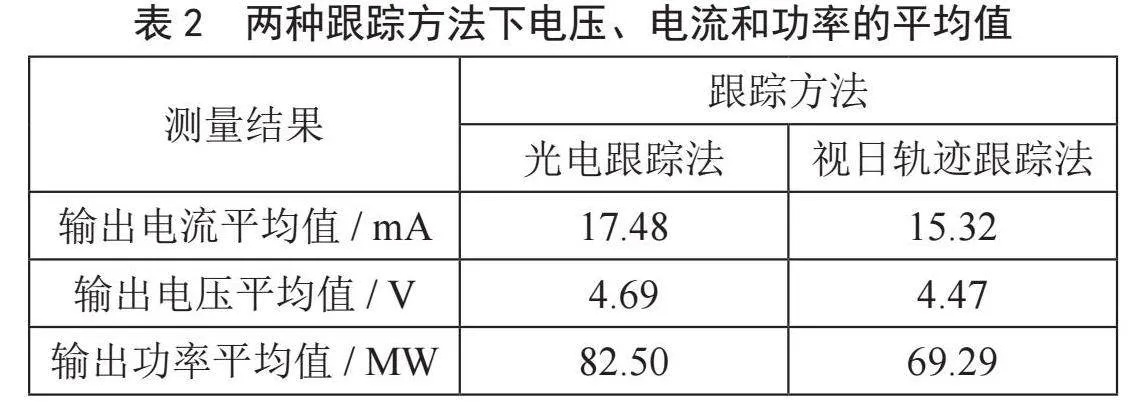
太阳能光伏花系统采用光电跟踪法和视日轨迹跟踪法时,太阳能板的输出电压平均值、输出电流平均值和输出功率平均值计算结果如表2所示。
从测量结果来看,无论从输出电流、输出电压,还是输出功率来看,光电跟踪法的效果都明显好于视日轨迹跟踪法。这可能是因为光电跟踪法更能实时响应太阳的位置变化,从而更有效地调整太阳能板的朝向,而视日轨迹跟踪法是基于预设的太阳运行轨迹进行跟踪,所以在实际运行中可能会受天气、季节等多种因素的影响,导致其性能远不及光电跟踪法。
总的来说,经反复的对比分析发现,光电跟踪法在提升太阳能跟踪性能上表现更佳。这是本团队优先选择光电跟踪法作为太阳能跟踪模块设计方案的重要因素。
5 结 论
本文设计一种基于STM32F103C8T6的太阳能跟踪装置,1ZP9Dw93rM4vz77TsaLQnw==利用HC-05蓝牙通信芯片实现手机与单片机之间的通信,可远程控制L298N电机驱动模块实现小车移动。文中主要阐述了光电跟踪法与视日跟踪法之间的差别和联系,并通过实验验证了光电跟踪法在灵敏度、输出功率、系统稳定性方面的表现优于视日跟踪法。多功能太阳能光伏花结构简单,操作简便,能够有效解决光照能耗过高和光源固定的问题。本文研究的多功能光伏花可在有效降低光照能耗的同时实现可移动光源的功能,最大程度上利用太阳能,可推动清洁能源的发展和应用,助力向我国提出的“双碳目标”迈进。
参考文献:
[1] 习近平在联合国生物多样性峰会上发表重要讲话 [J].资源节约与环保,2020(10):1.
[2] 吴莉萱.太阳能热水系统在建筑给排水设计中的应用和思考 [J].城市建设理论研究:电子版,2023(26):77-79.
[3] 张鹏飞.光伏发电自动跟踪系统的设计 [D].哈尔滨:哈尔滨理工大学,2009.
[4] 王哲,朱士成.基于单片机的太阳能电池板自动跟踪系统设计 [J].农机使用与维修,2022(6):12-14.
[5] 扎西顿珠,袁超,胡石峰.基于单片机的太阳能自动跟踪双轴系统设计 [J].黑龙江科学,2019,10(24):28-31.
[6Og/gWUNCTaTqVopoEgqv3w==] 李嘉晟,孔钰媛,李佳星,等.基于单片机的太阳双轴自动跟踪系统的研究 [J].电子制作,2021(15):92-94.
[7] 庄建铨.太阳能跟踪控制系统的设计与应用 [J].机电工程技术,2022,51(11):231-234.
[8] 王瑜.双轴太阳能光伏发电自动跟踪系统可靠性研究 [D].汉中:陕西理工学院,2016.
[9] 牟如强,李乐.基于单片机的新型太阳能双轴跟踪装置设计 [J].组合机床与自动化加工技术,2018(3):148-150.
[10] 夏正璞.基于STM32系统的自跟踪太阳能板设计与调试 [J].产品可靠性报告,2023(6):71-73.
[11] 容志滔,黄雁.电池保护电路中MOSFET器件常见失效机理研究 [J].电子产品可靠性与环境试验,2023,41(2):21-27.
[12] 李芸,李慧慧,申晓月,等.基于STM32的智能物料运输小车的设计与实现 [J].现代工业经济和信化,2023,13(8):106-108+111.
[13] 李建林,惠东,靳文涛.大规模储能技术 [J].电气时代,2018,38(12):96.
[14] 彭建军.太阳能LED路灯系统的设计与应用 [J].智能建筑与智慧城市,2021,28(1):68-69+80.
作者简介:严立政(2003.01—),男,汉族,重庆南岸人,本科在读,研究方向:控制工程。