2D激光雷达室内平面数据预处理方法研究
2024-09-19 00:00:00赖振彬李昱江李洋帅海乐杨垣
现代信息科技 2024年13期

摘 要:采用2D激光雷达对建筑房间进行扫描测量时,激光雷达点云将会受到噪声、离群跃变点和数据缺失等因素的干扰,影响点云数据的处理速度。为提高2D激光雷达点云数据处理速度和建筑房间平面绘制精度,采用差值滤波法、最小二乘法等算法以及动态阈值特征提取法实现了2D激光雷达点云数据的预处理。通过试验对点云数据预处理方法进行了验证,结果表明,2D激光雷达可以快速获取门、窗、梁、柱的尺寸信息,能够显著提升建筑空间的测量精度和平面图绘制效率。
关键词:激光点云;离散;滤波;差值;平面绘制
中图分类号:TP391 文献标识码:A 文章编号:2096-4706(2024)13-0125-04
Research on 2D Laser Radar Indoor Planar Data Preprocessing Methods
LAI Zhenbin, LI Yujiang, LI Yang, SHUAI Haile, YANG Yuan
(Guizhou Construction Science Research and Design Institute Co., Ltd. of CSCEC, Guiyang 550006, China)
Abstracts: When 2D LiDAR is used to scan and measure the building room, the LiDAR point cloud will be interfered by noise, outlier jump points and missing data, which will affect the processing speed of the point cloud data. In order to improve the processing speed of 2D LiDAR point cloud data and the accuracy of building room planar drawing, the algorithms such as difference filtering method, least squares method and dynamic threshold feature extraction method are used to realize the preprocessing of 2D LiDAR point cloud data. The point cloud data preprocessing method is verified through experiments, and the results show that 2D LiDAR can quickly obtain the dimensional information of doors, windows, beams, and columns, and can significantly improve the measurement accuracy of architectural space and the efficiency of planar drawing.
Keywords: laser point cloud; discrete; filtering; difference; planar drawing
0 引 言
随着城市建设步伐的不断加快,越来越多的老旧建筑被纳入更新改造的计划中,老旧建筑因使用年限长、使用过程中发生功能改动以及运维不当等因素存在实际布局与原始图纸资料不符,或者是图纸在传递过程中有丢失情况的发生,想要获取老旧建筑详尽的平面图和通过逆向建模来验算老旧建筑的安全性能,必须对老旧建筑的实际情况进行测量。激光雷达测距技术的发展为三维空间数据的获取提供一种全新的技术方法,可用于快速精准获取物体二维或三维数据,同时实现目标物体或场景的三维重建[1]。激光扫描快速采集数据的特点推动了其在线测量技术在工程应用中的快速发展,室内的三维测量可借助激光雷达来实现,完美体现了室内三维测量在装修公司、房地产业、室内地图等[2-3]领域的应用价值,基于光学仪器倾斜摄影或激光雷达采集数据并精细处理计算的深度学习三维重建已成为主流的三维重建技术[4]。激光雷达扫描测量装置是获取建筑尺寸、构件位姿等信息的技术手段,可分为多线激光雷达和单线激光雷达,两者的测量精度旗鼓相当。目前常用的激光雷达传感器有二维和三维两种[5],三维激光雷达传感器的扫描效率和精度高、细节描述清晰、信息含量丰富,但其在扫描过程中通常需要加设基准站点以保证后续点云数据的内业拼接质量,点云数据量巨大,需要由专业技术人员来处理且过程烦琐。二维激光扫描以激光发射器为原点,以固定频率向外360°发射激光来获取遮挡物的距离数据,是获取空间平面信息的有效手段,但其仍然存在着噪声、离散化误差等问题[6]。二维激光扫描采集的点云存在大量的噪声,不仅降低了数据处理设备的处理速度,更是增加了后期模型的构建难度并降低了模型精度。针对二维激光雷达在对建筑进行扫描测量中因门窗洞口、桌柜等遮挡物而产生的大量点云噪声影响建筑建模精度和效率的问题,本文提出一种差值滤波方法,对二维点云数据进行预处理,提高二维点云数据的准确度。
1 二维点云数据的获取
1.1 点云数据采集设备
点云数据是逆向建筑逆向建模的核心[7],本文采用移动式二维激光雷达作为点云数据的采集设备。二维激光扫描仪的优点有结构简单、成本低、受光照因素影响较小和测距精度高[8]。通过设置外围供电电路和数据采集电路,通过串口通信采集数据将其回传主控芯片并通过Wi-Fi将数据传输至移动端,在移动端对点云数据和方位角度数据进行粗加工处理后自动绘制被扫描物体的轮廓线,经过相应简易操作后予以展示和存储。
1.2 点云数据获取方案
单线激光雷达每次扫描能够获取一个扫描平面的深度信息[9],建筑房间是由三面以上墙体首尾相连形成相对封闭的空间,在激光雷达扫描测量过程中每面墙体都可以被看成一个测量段。当房间内无桌子、柜子、空调等遮挡物遮挡墙面时,激光雷达旋转(顺时针旋转)环切扫描测量过程中,每个测量段的测量距离具有周期变化性,其周期性可以分为以下几种情况:
1)如果扫描起点激光反射点对齐四个墙角之一即任意一个测量段的一端,则该测量段的测量距离由大变小,当扫描点激光与测量墙体和激光器铅垂线重合时测量值到达当前扫描的极小值,随后逐步增大,第一次到达该测量墙体另一端点时,测量值达到极大值点,随后再次减小,直至完成一周扫描测量。其测量值变化规律为:起始值—减小—极小值—增大—极大值,如此循环往复直至房间四面墙体全部扫描完毕。
2)当扫描起点激光以垂直于四面墙体中的任一墙体开始测量时,其测量值变化规律为:极小值—增大—极大值—减小—极小值。
3)当扫描起点位于任一墙体任一位置(非墙角处、非垂直墙面处)时,测量值有两种情况:一是起始值—增大—极大值—减小—极小值—增大—极大值;二是起始值—减小—极小值—增大—极大值—减小—极小值,如此循环往复,直至扫描测量一圈。
三种扫描测量方式的共同点是,扫描测量一圈均会出现4次极大值和4次极小值,4次测量极大值分别对应的测量点是房间内的四个墙角,4次测量极小值分别对应的测量点是设备放置点与墙面的铅锤点处。由此可以得出结论,在扫描房间内无桌子、柜子等遮挡物的情况下,扫描测量值不会产生大的跃变。
通过以上扫描方式的选择可以得到夹带许多噪点的建筑房间平面点云数据,此点云数据需要经过过滤和清洗才能用于房间建模中。
2 点云噪声滤波算法
2.1 点云噪点的产生
激光雷达是通过向外发射激光信号并接收反射回来的激光信号来测量物体距离的,因此在获取点云数据时,由于受到外界干扰(如视线遮挡、障碍物等因素)的影响,点云数据中存在一些距离主题点云较远的离散点,即离散群点。在室内进行测量时,由于房间内有桌子、书柜等家具,梁柱等结构构件以及门窗洞口等开口的存在,测量距离的差异会使激光雷达点云产生跃变,导致激光雷达点云凹凸不平。在玻璃环境中,激光雷达发出的光绝大部分透过玻璃而无法返回被接收,所以尽管透明玻璃是平面的,在激光雷达扫描的点云图中显示的却只是很小的一团点云,其特征与周围的噪声点云类似[10]。为提高激光雷达点云质量,需要研究激光雷达点云滤波算法,去除无用的噪声点。
2.2 点云滤波算法
2.2.1 扫描离群跃变点云降噪-差值滤波法
根据激光雷达在无障碍物及玻璃洞口的一般规则的封闭空间扫描测量值不会产生跃变这一原则,设置一定的阈值如当前点N与其前(N-1)后(N+1)各一个点共计3个点进行两两差值比较,当其满足L(N)-L(N-2)、L(N) - L(N-1)、L(N+1) - L(N)、L(N+1) - L(N-1)、L(N+2) - L(N)点差值大于A时,删除第N点,随后将第N + 1点和第N + 2点做比较,循环作差值比较直至所比较的第N + M个点云与第N个点云的差值小于等于A,利用第N + M个点云和后面的点云逐一进行作差与设定阈值比较,直至所有点云完成一轮比较,删除满足条件的离散跃变点云。利用上述算法可以去除玻璃洞口等部分的离群跃变点云,完成二维激光雷达环切扫描测量所得到的所有点云数据进行的第一步清洗处理,再进行更深程度的滤波。
2.2.2 连续点云的滤波
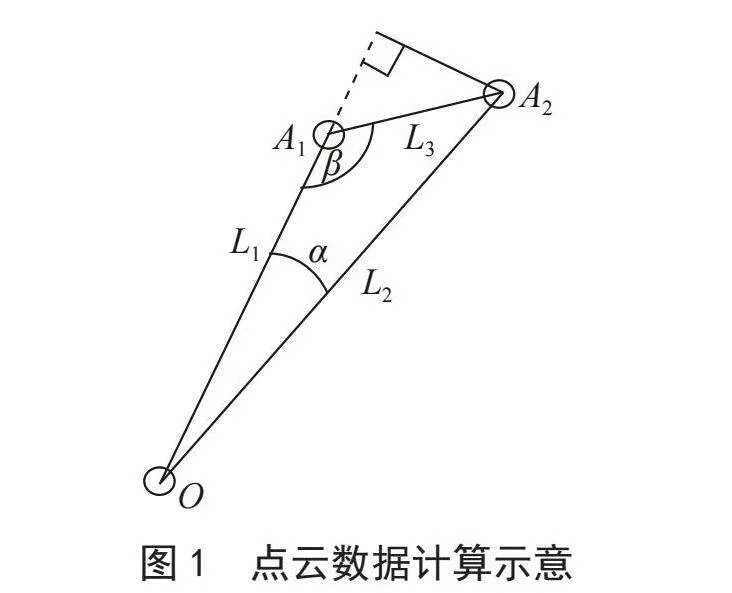
如图1所示,激光雷达激光发射点为O,激光雷达的角分辨率为α,是激光雷达固有参数,由激光雷达厂家出厂设定,不可更改。对于任意连续的两点A1、A2,则有A1、A2点到发电点O的距离为L1和L2,因为L1和L2的起点都是激光发射点O且两点是连续的,所以,L1和L2两条线形成的夹角为激光雷达的角分辨率α,A1点到A2点的直线距离L3可由余弦定理式(1)求出。L1和L3之间的夹角β可由式(2)求出:
将L3代入式(2)可以得到式(3):
α由厂家出厂设定,是固定值,其值较小。L1、L2是激光雷达测量值。以本文所采用的单线激光雷达为例,其角精度为0.8°,cos α≈0.999 9,因此式(3)经演变后表达式为:
由式(4)可以看出,当L2的值比L1大时,β角大于90°,当L2的值比L1小时,β角小于90°。
当测量的是一面连续且在物体和雷达中间无障碍物体时,由于激光雷达为旋转式和雷达精度的制约,后测量点A2到发射点的距离L2比前测量点A1到发射点的距离L1的大小差异不会很大,利用此关系经计算可以得到线段L1和线段L3之间夹角β的大小。在忽略雷达误差精度的基础上,线段L1和线段L3之间的夹角β应该在(90 - α~90 + α)之间:
假设由于雷达精度导致的角度误差为γ,那么β角会由(90 - α~90 + α)之间变为(90 - α ± γ~90 + α ± γ)之间。在点云滤波算法上设置一定的阈值γ(γ可根据实际情况进行调整),当β值大于(90 - α + γ)或小于(90 - α - γ)时,认为该点云是离散点云,可以将其消除。当β值在(90 - α - γ)和(90 - α + γ)之间时,认为该点云与其前序点云是连续点云,保留该点云进入下一矫正步骤。
上述滤波方法可以用于无梁柱、桌子、柜子等遮挡物房间扫描点云的滤波,当房间内有梁柱、桌子、柜子等遮挡物时,需要考虑遮挡物对距离测量的影响。当有突出遮挡物或凹进开槽且凹/凸物体宽度较大时,除了需要计算对比跃变点与前序点的β角是否在(90 - α + γ)区间,还需要计算对比跃变点与其后续一定范围内点云之间的β角是否在(90 - α + γ)区间,此时可以设置跃变点及其后续点与其前序点需要逐一计算对比的点云范围。遇到突变点时,往后计算对比10个点云数,当计算得到的10个点云的β角都在(90 - α ± γ)区间时,则判定为凹/凸物体,继续往后计算β角直至遇到下一个突变点,重复以上操作。
3 试验结果与分析
为检验上述滤波方法的可行新,采用乐动机器人生产的LD19型激光雷达传感器作为点云数据的采集传感器。该传感器采用左手坐标系、旋转中心作为坐标原点,正前方定义为零度方向,旋转角度沿着顺时针方向不断增大,如图2所示。采用激光雷达在某一房间内扫描测量所得到的原始点云数据。
该雷达转速稳定在10 ± 0.1 Hz,其角精度为0.8°。在进行扫描测量验证时,使用产品自带的可直观观察扫描效果图的实时扫描点云可视化软件LdsPointCloudViewer,对比分析LD19激光原始点云及经过本文噪点滤波算法后的点云,并在电脑端实时显示。
3.1 跃变离群点云滤波
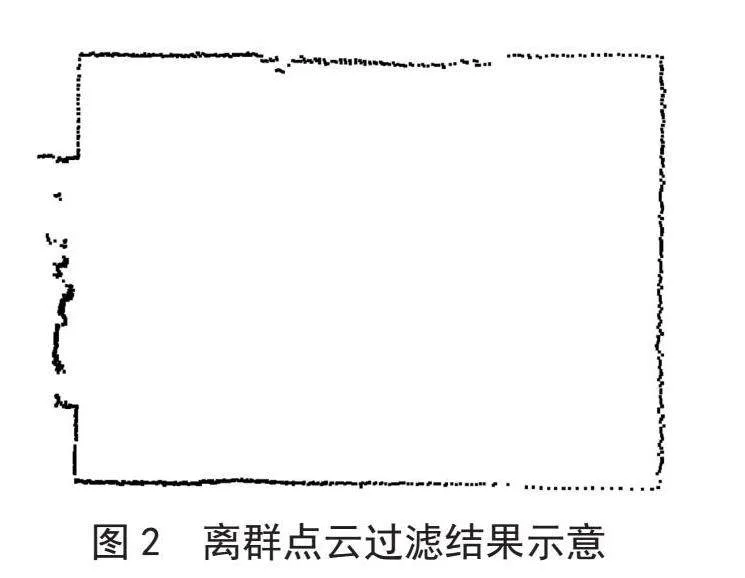
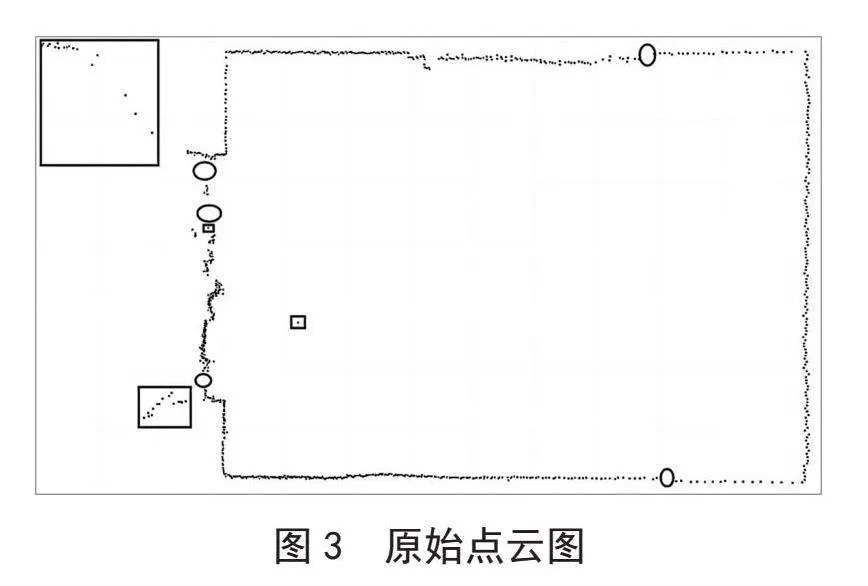
室内无桌子、柜子等遮挡物的环境下,利用激光雷达扫描测量系统采集5 m×4 m的办公室进行扫描测量试验,如图3所示为采集到的该办公室的原始点云数据,从图中可以看出由于玻璃的因素,点云数据不仅出现较大部分的离群跃变点,如图中方框所示;还出现了较大的缺失,如图中圆圈所示。利用激光雷达在同一平面扫描测量时点云数据不会发生跃变的规律,通过差值滤波法对原始点云数据进行滤波平滑处理,第一步去除跃变离群点云如图3所示,可以看到窗户外的点云已基本被去除,余下基本可以描述房间内部的基本概况。
3.2 连续点云滤波
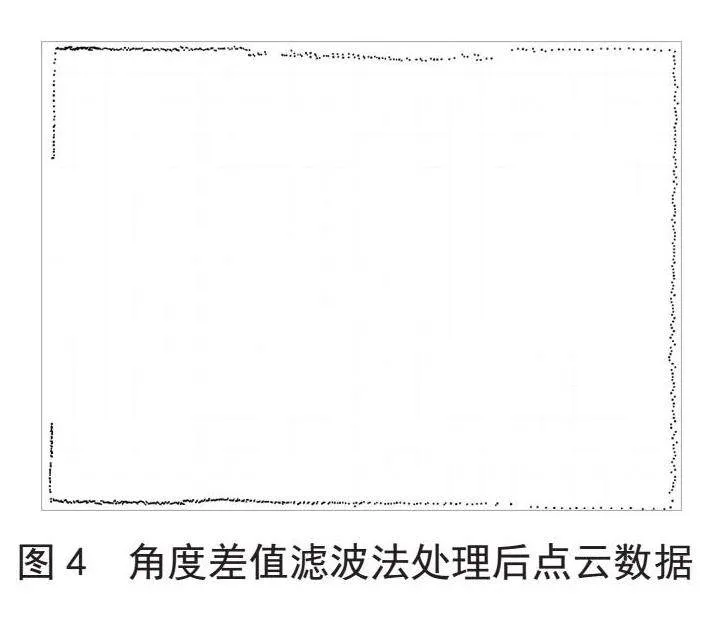
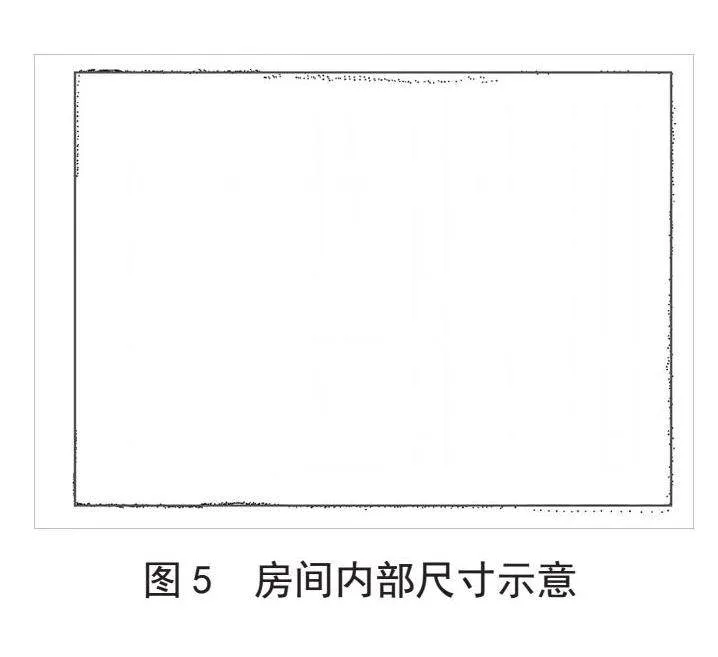
采用差值滤波法对原始点云进行滤波后,剩余点云仍会有较多的噪点,需要采用更精细的滤波算法对点云进行平滑处理。为实现对房间内特征点的提取,对滤波后的点云数据进行最小二乘法再次滤波,二次滤波得到的点云图如图4所示,进一步采用最小线框将二次滤波点云包裹住,结果如图5所示。
4 结 论
本文利用角度差值法对采集到的二维激光雷达点云数据中的噪点去除算法进行了设计研究,并在某建筑内几种环境类型的房间中进行了试验,验证了角度差值去除点云噪声的有效性。结果表明,所提出的角度差值算法能够有效过滤二维激光雷达点云数据中的跃变离群点云,经过滤波后的点云数据能够较为完整地保留房间内部结构的大致平面图,在精简点云的同时提高了点云质量。
参考文献:
[1] 王曾兰.基于二维激光雷达数据的三维重建研究 [D].沈阳:东北大学,2013.
[2] 刘昶,姜楠,贾峻权,等.单轴转台上2D激光雷达的位姿估计 [J].电子测量与仪器学报,2023,37(1):87-95.
[3] 易耀华.基于2D单线激光雷达室内三维测量技术研究 [D].西安:西安工业大学,2021.
[4] 李安琪,郑艳,王博,等.基于3D点云深度学习上采样的建筑物精细化三维重建 [J].现代信息科技,2023,7(21):136-139+144.
[5] 党敬民,翟冰,高宗丽,等.纳秒级脉冲型群红外量子级联激光器驱动电源 [J].光学精密工程,2013,21(9):2209-2216.
[6] 谢翔,杜年春,沈向前.不同滤波方法对二维激光雷达点云数据处理的影响 [J].地块测绘,2021,37(1):13-16.
[7] 伍根,熊小龙.基于三维激光扫描测绘技术的BIM逆向建筑建模方法研究 [J].城市测绘,2023(5):33-37.
[8] 张新荣,王鑫,王瑶,等.基于转动式二维激光扫描仪和多传感器的三维重建方法[J].中国光学:中英文,2023,16(3):663-672.
[9] 刘昶,姜楠,贾峻权,等.单轴转台上2D激光雷达的位姿估计 [J].电子测量与仪器学报,2023,37(1):87-95.
[10] 陈浩.基于激光雷达的室内玻璃三维重建算法 [J].信息通信,2019,198(6):44-46.
作者简介:赖振彬(1987—),男,汉族,广西陆川人,高级工程师,本科,研究方向:嵌入式系统设计开发、智慧测量;通讯作者:杨垣(1983—),男,苗族,贵州晴隆人,研究方向:建筑设计、建筑节能技术研究、绿色建筑方案设计及咨询、建筑节能设计、建筑工程设计、绿色建造、智慧建造等。