基于机电一体化的停车库PLC控制系统设计
2024-09-18 00:00:00刘新
电子产品世界 2024年7期


摘要:针对传统停车库控制系统精准度低、稳定性差等问题,提出一种新型停车库控制系统设计方案。该系统的设计融入机电一体化技术、可编辑逻辑控制技术等,将可编程逻辑控制器(programmable logiccontroller,PLC)作为核心控制器,结合传感器、执行机构等硬件设备,实现了停车位的智能分配、自动化管理、车辆存取、安全监测等功能。详细介绍了停车库PLC 控制系统软硬件设计、控制策略以及实验验证等方面的内容,旨在为停车库控制系统的研发提供参考。
关键词:机电一体化;停车库;PLC 控制系统
中图分类号:TP273 文献标识码:A
0 引言
在我国城市化进程不断加快的背景下,城市车辆保有量不断增加,停车难的问题愈发凸显,这对城市交通发展造成了一定的影响。为有效应对这一挑战,本文结合西门子S7-1500 系列可编程逻辑控制器(programmable logic controller,PLC)[1],设计了一种新型立体停车库控制系统。该系统以机电一体化技术和PLC 控制为核心,实现了对停车库的实时监控和智能管理,从而提高停车库空间的使用效率。同时,智能停车库控制系统还可以根据车流量和停车需求,动态调整停车库的使用情况,进一步提高停车效率。该系统还具备远程管理功能,用户可以通过手机或电脑等终端设备,随时查看停车库的使用情况和车辆状态,实现远程预约和管理,解决停车难、效率低等问题。
1 PLC技术
PLC 具有高可靠性、灵活性、易维护性和可扩展性的优势。PLC 采用了先进的抗干扰技术和工业级设计,提高了其在恶劣环境中的运行稳定性,确保生产过程的连续性和安全性。PLC 支持模块化设计,可以根据需要添加或移除功能模块,从而适应不同规模和复杂度的控制系统。PLC 使用易于理解的梯形图或指令表编程语言,使工程师能够快速编写和修改控制程序,以适应不同的生产需求。PLC具有强大的自诊断功能,能够及时发现并报告故障信息,使维护和故障排除工作更加方便快捷。此外,PLC 可以根据输入信号的状态,按照预设的逻辑程序,输出控制信号以驱动执行机构,实现对设备和生产过程的控制。PLC 支持多种通信协议,可以与上位机、其他PLC、变频器、触摸屏等设备进行通信,实现数据的交换和共享。
2 基于机电一体化的停车库PLC控制系统结构设计
以商业街停车库为研究对象,将其设计为升降横移多层立体结构。简单来说,立体停车库有10 层,每一层停50 辆车,约500 个车位组成单个模块,且该模块设计可安装在转弯角度为90° 的位置上。停车库的设计还可以根据实际需求,设计成单模块或者双层模块,通过增加模块组合数量,提高停车库的容量。
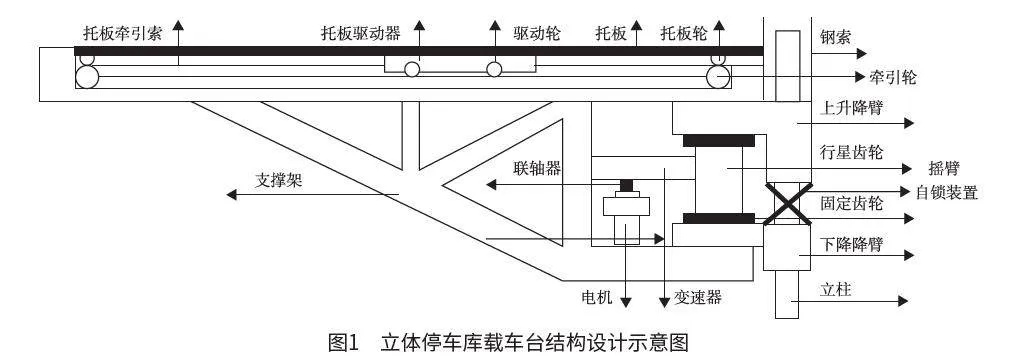
当汽车缓慢驶入停车库内的指定道路时,智能化光电传感器可以立即感应车辆的进入,并自动启动控制机制,打开停车库的控制门。此时,驾驶者只需将车辆稳稳地停放在旋转台上,便可以沿人行通道离开。在通过便捷的刷卡过程并记录下个人信息后,服务台便会生成一张停车卡,作为此次停车的凭证。随着入库流程的完成,出入库的大门将缓缓关闭,同时,系统开始自动操控旋转台,使其精准地旋转180°,为接下来的停车操作做准备。此时,在系统精准控制过程中,停车库载车台能够升到旋转台最高位置,为接下来的车辆转移做好准备。图1 为立体停车库载车台结构设计示意图,该设计配备了一套托板驱动机构。当需要停车时,这套机构能够通过载车台滑出托盘,直至延伸至汽车底部。汽车停稳后,载车台会根据预设的程序,缓缓移动并翻转,将汽车安全地停放在指定的停车位。而当驾驶者需要取车时,只需在服务台处插入停车卡或输入预设的密钥,系统便会根据之前的存取信息,快速定位车辆所在的位置,并通过托板驱动机构将车辆从停车位上移出,送至取车处。整个过程快捷、安全,为驾驶者提供了极大的便利[2]。
3 停车库控制系统软硬件设计
3.1 智能PID 算法设计
系统软件设计主要包括人机交互界面和PLC 程序设计。PLC 程序设计采用模块化设计,将系统功能划分为多个模块,如停车位管理模块、车辆存取模块、安全监测模块等。每个模块都具有独立的功能和接口,便于系统的维护和扩展。人机交互界面设计采用图形化界面,提供直观的操作提示和状态显示,方便用户进行操作。而PLC 控制系统主要包含被控制对象和智能比例积分微分(proportionalintegral derivative,PID) 控制器。假设给定的数值与系统实际输出的数值分别为a (r)和b(r),则两者之间存在的控制偏差数值c(r)为:
c(r)=a( r)-b(r)。 ( 1)
停车库PLC 控制系统中PID 控制的输入量为c(r),经模糊量化处理之后,可得到关于模糊语言的子集合。通过被控制对象和PID 控制输出量d(r),可以得到智能PID 控制算法:
式中,fq、Ru 和Rs 分别为停车库PLC 控制系统中的智能PID 比例系数、积分系数及微分系数,t 为时间,c( t)为当前时刻被控对象的输出值,此值能与设定值对比。
在停车库PLC 控制系统中使用智能PID 控制时,通过对d(r)进行非模拟化处理,能够进一步提高系统的精准控制和对应精准数据量。
3.2 智能PLC 控制系统设计
在停车库PLC 控制系统中引入智能控制输出模块,优化了载车系统的运动方式,提高系统运行过程中的响应速度和稳定性,实现汽车对号入位。首先,载车系统的运动由高精度的步进电机和异步电机共同驱动。步进电机负责推动载车台进行精确旋转,确保车辆能够准确地进入预定的车位;而异步电机则负责驱动机械装置,在水平方向上移动载车台,进一步提高存取效率。通过变频器对电动机进行调速[3],无论是载车台的旋转还是平移,该系统都能根据实际需要及时调整相应的速度,从而实现高效地存取操作。其次,该系统设置多层次的保护机制。当升降机构接近目标位置时,近行程开关和接近控制器会立即发挥作用,确保电机适时减速并停止工作。同时,近行程继电器也会及时切断电源,防止电机继续运行对车辆造成不必要的损坏。最后,在小车停车时,将步进电机设置于承载小车中,利用托盘开展平移操作。如果需要将小车送入车位,电动机正转,将平动操作台向前平移;反之,如果需要取出小车,则电动机反转,将平动操作台向后平移。这种灵活的操作方式使车辆的存取过程更加顺畅、高效。在完成一个存取任务后,升降载车系统会自动复位,并等待下一次存取命令。这种智能化的工作流程使立体车库系统能够持续、稳定地为用户提供优质的停车服务。
3.3 上位机智能监控系统设计
为了满足停车库对高效、智能管理的迫切需求,本文设计了一款上位机智能监控系统,用于实时监控智能停车库的内部状态。该系统以监视与控制通用系统(monitor and control generic system,MCGS)触摸屏上位机为核心,其不仅具备直观、简洁的操作界面,而且功能全面,能够轻松实现与工业设备的双向通信。在该系统的设计中,利用了以太网技术和下位机的协同作用,确保上位机与下位机之间的数据能够实时同步。通过这种方式,准确传递车辆的存取指令,并在触摸屏上实时显示停车库的运行动画,从而实现对智能停车库实际运行情况的全面控制、高效管理以及精确监控。此外,在对数据处理过程中,上位机智能监控系统功能强大,能够实时分析停车库的运行数据,为用户提供智能化的决策支持,确保停车库的安全、稳定运行[4]。
4 仿真测试分析
4.1 测试环境搭建
为了进一步验证本文提出的停车库PLC 控制系统的可行性,通过搭建仿真模拟环境进行仿真测试,具体测试环境如表1 所示。
4.2 测试结果分析
本次测试对象主要分为实验组和对照组,其中实验组为本文设计的控制系统,对照组为基于分散控制系统(distributed control system,DCS) 的停车库控制系统。在同一测试环境下,通过对比测试来判断基于机电一体化的停车库PLC 控制系统的性能[5]。随着停车场车辆数量不断增加,基于DCS的停车库控制系统的停车准确率从100% 下降至72% 左右。这表明随着车辆数量的增加,系统对于车辆准确停入车位的控制能力有所下降。在同样条件下,本文设计的控制系统准确率下降幅度较小,仅从100% 降至97% 左右。该数据证明了PLC 系统在高流量场景下具有卓越的性能。采用机电一体化的PLC 技术,不仅实现了系统对停车过程的精准控制,而且在大规模车辆流量下依然保持了极高的准确率。
5 结语
综上,本文提出了一种基于机电一体化的停车库PLC 控制系统设计方案,并详细介绍了系统的软硬件设计、控制策略以及实验验证等方面的内容。该系统采用PLC 作为核心控制器,结合传感器、执行机构等硬件设备,实现了停车位的智能分配、车辆存取、安全监测等功能。实验结果表明,该系统具有高度的自动化、智能化和可靠性,能够有效解决城市停车过程中存在的问题。
参考文献
[1] 李亚龙. 自动双层停车场PLC 控制系统设计[J]. 模具制造,2024,24(2):139-141.
[2] 黄丽丽,王金龙,吴迪,等. 基于PLC 的电动自行车智能立体车库控制系统研究 [J]. 汽车博览,2023(4):113-115.
[3] 刘永. 机电一体化的立体停车库PLC 控制系统设计[J]. 无线互联科技,2023,20(9):99-101.
[4] 邝爱华,陈卓. 基于PLC 技术的智能停车库控制系统设计[J]. 现代制造技术与装备,2022,58(11):212-215.
[5] 王瑞,赵雄伟,张波波,等. 智能立体车库自动控制系统的设计及模拟应用[J]. 制造业自动化,2022,44(1):134-138.