
低轨卫星导航增强系统半物理仿真平台设计
2024-09-18 00:00:00梁日芳
电子产品世界 2024年7期
摘要:为提高低轨卫星导航的性能和收敛速度,设计了一款功能完善、实用性强的低轨卫星导航增强系统半物理仿真平台。首先,介绍了系统设计关键方法。其次,从卫星信号模拟模块设计、导航信号接收模块设计、射频信号捕获模块设计、射频信号跟踪模块设计4 个方面,介绍了该物理仿真平台设计和构建。该低轨卫星导航增强系统半物理仿真平台具有收敛速度快、导航能力强等特点,满足预期设计标准和要求。
关键词:低轨卫星;导航增强;北斗卫星导航系统;物理仿真平台
中图分类号:TN967.1;P228.4 文献标识码:A
0 引言
在人工智能时代背景下,无人驾驶技术取得了迅猛发展,加大了快速性、精确性时空信息的需求量。在这样的背景下,卫星导航精密单点定位(precise point positioning,PPP)技术应运而生,该技术的应用可以为无人驾驶行业的发展提供厘米级高精度定位服务体验[1]。该技术在具体应用中具有较低速率的收敛性,而低轨卫星导航增强系统的出现和应用可以解决以上问题。该系统的应用可以保证定位的精度和快速性,降低定位成本[2]。为此,本文应用低轨卫星导航增强系统,设计了一款新型、先进的低轨卫星导航增强系统半物理仿真平台。
1 系统设计方法
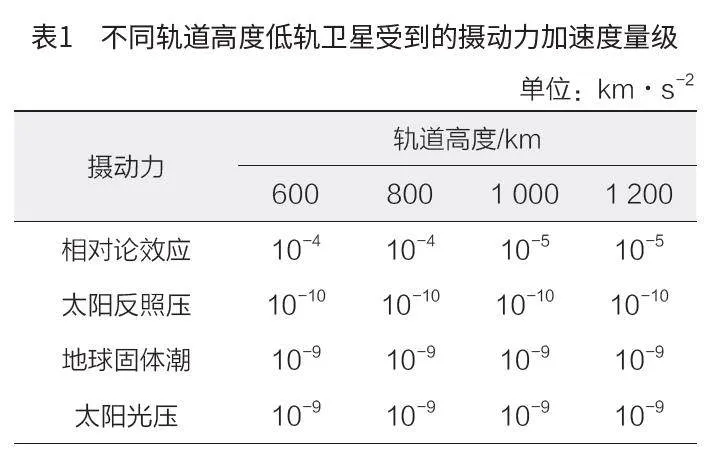
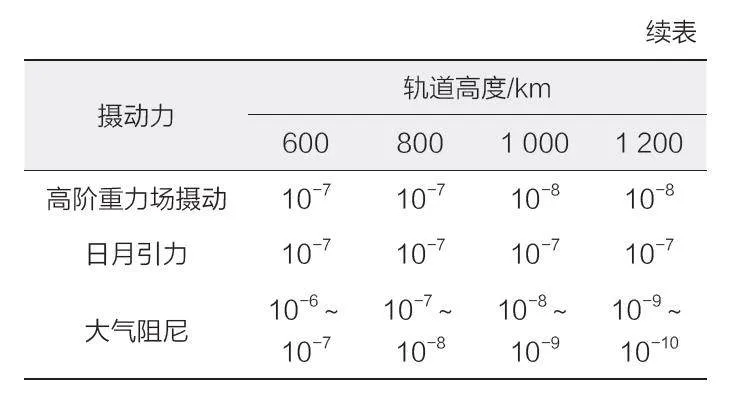
在设计本文系统时,主要运用低轨卫星轨道外推方法。该方法在具体应用时,需要在仿真处理导航卫星信号观测值的基础上,精准构建相应的卫星动力学模型,从而保证仿真平台运行性能。此外,为降低低轨卫星受到的非保守力,技术人员要严格按照表1 的要求,为不同轨道高度的卫星设置相应的摄动力加速度量级,确保低轨卫星摄动误差降至最低。
2 系统功能模块设计
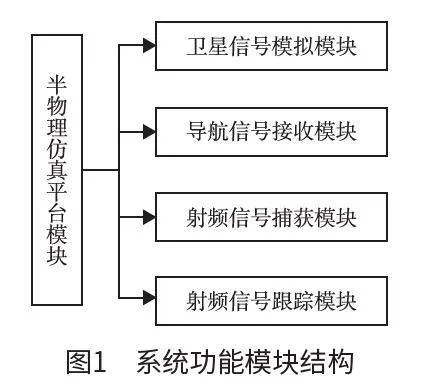
为了保证低轨卫星导航增强系统半物理仿真平台的实用性和可靠性,实现不同信号的模拟、接收、捕获和跟踪处理,缩短系统收敛时间,提高最终定位结果的精确度,技术人员需要严格按照系统功能模块结构(图1)完成相关设计。其中,4 个子功能模块具体为:①卫星信号模拟模块。该模块可以帮助用户快速模拟和处理北斗、低轨导航增强系统卫星之间的射频信号。②导航信号接收模块。该模块可以帮助用户实时接收和处理由增强信号联合接收机所发出的模拟发射信号。③射频信号捕获模块。该模块可以保证射频信号捕获成功率,为后期信号跟踪提供重要的依据。④射频信号跟踪模块。该模块主要用于对射频信号的实时跟踪和定位,方便相关人员快速、准确地定位当前低轨卫星位置。
2.1 卫星信号模拟模块设计
卫星信号模拟模块在具体设计时,技术人员需结合特定的应用场景,采用仿真建模的方式,模拟处理由北斗卫星、低轨卫星所发出的射频信号。同时,结合用户场景参数最终设置结果,对卫星与用户之间的位置距离进行精确计算,并对电离层、星钟等各个时段的误差进行叠加处理,从而实时生成海量的仿真数据,这些仿真数据主要包含导航电文信息、观测量信息等[3]。基于此,技术人员可以对电路进行模拟调制,使系统能够结合所采集的仿真数据,自动生成伪码和电文,并对伪码和电文内容进行调制、变频处理,从而为用户提供多频点、多体制的射频信号生成方案[4]。为实现对卫星信号的真实化模拟,技术人员需要结合用户、空间、环境数据仿真结果,搭建用户天线方向图模型、卫星星钟模型和动力学模型等多个数学模型[5]。
2.2 导航信号接收模块设计
导航信号接收模块可以实时接收和处理北斗卫星射频信号和低轨卫星射频信号。首先,技术人员需要捕获、跟踪5 个频点所对应的射频信号,并结合电文信息的最终采集结果,精确计算卫星位置。其次,技术人员应用北斗卫星和低轨卫星所产生的导航信息,对不同卫星当前位置进行融合化、精确化定位[6]。最后,将最终导航定位结果进行汇总和呈现,方便用户结合最终定位结果,参照观测量信息,开展相关评估分析工作。为实现中频电频的稳定、可靠输出,技术人员需要结合接收信号在不同应用场景下相应的信号强弱变化情况,设计中频电平的电路。
2.3 射频信号捕获模块设计
当低轨卫星的轨道高度达到800 km 时,地面接收机最大多普勒频偏达到50 kHz。但是,如果选用普通接收机捕获算法,所获得的多普勒频偏范围为-6 kHz ~ 6 kHz,在捕获接收机信号期间,由于受低轨卫星高动态性能影响,整个接收机信号捕获过程漫长而复杂[7]。
为避免以上问题的出现,本文运用性能监视器功能(performance monitor function,PMF)与快速傅里叶变换(fast Fourier transform,FFT)相结合的方式,设计接收机信号捕获流程(图2)。从图2中可以看出,在输入信号至射频信号捕获模块时,为实现对PMF1、PMF2、PMF3、……、PMF40 等海量相关器组的成功匹配,首先需要在运算相关信号的基础上求取幅值,并标记为64 点流水FFT,从而获得最大结果。其次,将最大结果与门限值进行对比,如果前者大于后者,说明捕获成功;反之,说明捕获失败。最后,将所计算的多普勒频偏和码相位估计值传输至射频信号跟踪模块中。总之,技术人员通过对接收机信号进行精确化捕获,不仅可以提高动态信号捕获成功率,还能控制信号捕获时间,避免因信号捕获时间过长而影响整体动态信号的捕获效益[8]。
2.4 射频信号跟踪模块设计
在具体设计射频信号跟踪模块时,结合多普勒频偏和码相位估计值,计算锁相环稳态跟踪误差,并科学地设计环路噪声带宽、非相干累积次数、灵敏度、频点数量等参数,从而达到持续、稳定地跟踪低轨卫星射频信号,以及精确化定位当前低轨卫星位置的目的。锁相环稳态跟踪误差(θe)计算公式为:
θe= 1/wnN × d NR/dt N 。 ( 1)
式中,R 为低轨卫星与接收机之间位置间距; d NR/dt N为位置距离对时间的次导数;1/wnN 为位置距离对卫星旋转角度N 的次导数。
3 结语
综上,本文所设计的低轨卫星导航增强系统半物理仿真平台具有良好的应用效果,不仅可以真实化模拟卫星信号,还能用于对导航信号的实时接收,保证了系统快速收敛特性实现效果。本文针对低轨卫星导航增强系统进行半物理仿真平台设计,通过对低轨卫星轨道外推方法和高动态信号捕获及跟踪技术两个方面的研究,成功搭建低轨卫星导航增强系统半物理仿真平台。该平台可应用于低轨导航增强系统仿真测试,保证低轨卫星定位结果的精确度和高效性,符合预期设计标准和要求,对于未来低轨卫星导航增强系统的建设提供重要的依据和参考。
参考文献
[1] 余鑫,金小军,莫仕明,等. 基于北斗B3 频点的低轨卫星实时定轨性能评估[J]. 浙江大学学报(工学版),2020,54(3):589-596.
[2] 胡远东,陆正亮,廖文和. 低轨纳卫星质量矩姿态控制技术研究[J]. 力学学报,2020,52(6):1599-1609.
[3] 周全,张扬,李子申,等. 低轨卫星导航增强星座地基观测仿真系统设计[J]. 测绘通报,2022(2):110-115.
[4] 孙小景,黄军超,聂洪山. 低轨卫星导航增强监测站系统故障模拟仿真[J]. 中国新通信,2023,25(24):52-55.
[5] 卢鋆,张弓,申建华,等. 低轨增强星座对卫星导航系统能力提升分析[J]. 卫星应用,2020(2):49-54.
[6] 田润,崔志颖,张爽娜,等. 基于低轨通信星座的导航增强技术发展概述[J]. 导航定位与授时,2021,8(1):66-81.
[7] 孟祥芳,易卿武,谢松,等. 基于IIVSSLMS 低轨卫星导航增强系统数字域自干扰对消算法研究[J]. 无线电工程,2022,52(9):1594-1601.
[8] 郭学立,王磊. 低轨卫星导航增强系统精密星历设计方法研究[J]. 大地测量与地球动力学,2021,41(8):800-805.
