
一种多设备融合周界入侵监测方法
2024-09-14 00:00:00娄占磊雒崇安王柳彭夏博
物联网技术 2024年3期
关键词:雷达



摘 要:当前周界入侵监测中常用的设备包括雷达、智能围网、视频目标监测设备,不同设备有自己优点和擅长领域,但是又各自有其局限性,普遍存在漏报和误报现象,达不到全方位智能监测的要求。因此本文研究一种多设备联动融合监测方法,根据各个设备的擅长领域进行融合使用,充分利用各自的优势,形成一套更加立体、智能、灵活的入侵监测系统。
关键词:入侵监测;雷达;视频识别;智能围网;智能防范;融合技术
中图分类号:TP399 文献标识码:A 文章编号:2095-1302(2024)03-00-04
0 引 言
当今用于周界入侵监测的技术手段主要包括小目标雷达、智能围网(微振动监测、微波探测、红外探测)、电子单兵、视频目标监测等[1-5]。根据实际情况本次研发测试选用小目标雷达+振动围网+视频目标识别。雷达负责目标预警与跟踪,因为雷达的1°误差,距离误差可能达到17.44 m,所以需要智能围网判断目标是否越界,但是如果有动物或大风吹起的漂浮物会造成误报,所以采用视频进行目标识别,将非防范目标过滤掉。
1 系统总体设计
多设备联动控制系统的业务流程为:当有活动目标进入布防区域时,检测设备开始检测活动目标,产生周界防范预警事件,并将事件上报给中心平台;综合安防监控管理平台报警系统接收到事件后,可进行事件查看;平台通过不同的入侵区域和类型,触发不同的联动方式,例如雷达和光电联动、微波和监控联动等多种组合联动。其中,视频周界防范会自动抓拍录屏并将报警事件发送到智能分析设备进行分析,分析目标是否为人后再触发报警事件。
2 功能描述
2.1 雷达和光电联动服务
雷达和振动光纤等检测系统,在给出目标的位置信息后,在智能算法的支持下,联动控制转台方位移动;通过深度学习算法,对目标进行识别,可以有效滤除误报,并对真实目标自动追踪、跟踪。当目标躲藏或丢失,基于深度学习跟踪算法的光电系统可快速实现或恢复对目标的二次跟踪。
系统依据不同地形、不同需求布防不同传感器,采用高点掌控整体情况,低点查看监控细节,进行大范围布设和部分地区的补盲建设,充分利用雷达的大范围搜索、光电设备的智能预警以及振动传感器的隐蔽性,对边境一线实现无缝覆盖。
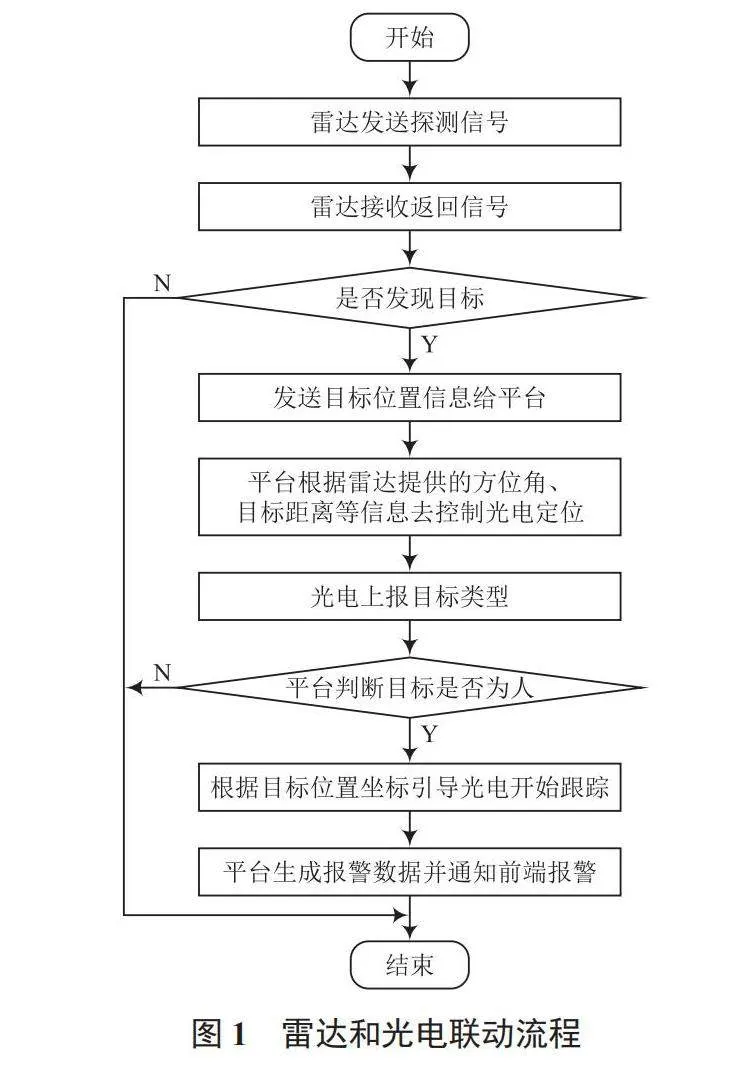
2.1.1 联动流程
雷达和光电联动流程如图1所示。
2.1.2 联动原理
雷达监控器探测范围宽、距离远且反应灵敏[6-8],当有入侵者进入雷达监控区域时,雷达就会发出预警信息,提示有入侵者进入。但是,雷达监控器不能够区分或识别入侵者的类型[9-11],因而容易造成误报。视频监控采集的图像信息丰富,可以对检测内容进行识别,但是其普遍存在着监控范围小、监视盲区多、目标定位跟踪困难等问题,显然不能满足现代安防监控的智能化需求[12]。因此,采取雷达和视频融合,由雷达监控器实时获取雷达监控区域内入侵者的位置坐标、运动速度等信息,视频监控器则用于获取监控区域的图像数据,能够结合雷达监控器和视频监控器两者的优势实现互补,获取全面的检测信息,避免因单个监控器获得信息不全面或者受外界环境的影响导致误报。根据预先建立的雷达监控器所监测到的目标在视频监控器所采集的图像平面中的坐标对应关系,将雷达监控器监测到的入侵目标的三维位置坐标映射为在同步图像中的位置坐标。坐标对应关系的建立步骤为:利用标定技术计算视频监控器的内部参数,建立视频监控器坐标模型;根据视频监控器坐标模型以及雷达监控器与视频监控器之间的位置关系,建立世界坐标系下雷达监控器所监测到的目标在视频监控器所采集的图像平面中的坐标对应关系。
2.1.3 联动实现
雷光联动服务具备光电设备对雷达识别的目标持续跟踪功能。任何目标物进入雷达探测范围内并触发系统告警时,系统即使用雷达监测目标的坐标数据联动就近的远程、中程、近程光电系统指向目标,开始进行视频监控。如果确认目标为可疑目标,则在三维地图上对目标物进行标注锁定,系统自动将目标信息推送至周围距离最近的双光谱热成像网络云台摄像机或球机(视天气雨雾可见度影响、目标距离而定),雷达可以对应多台双光谱热成像网络云台摄像机和球机。同时,告警信息和监视视频将被送往管理员终端,提示予以处置。整个过程的告警触发事件、引导数据、视频数据都被系统实时记录,方便随时调用回放。管理员也可使用态势终端人工引导光电进行主动监视。雷光联动如图2所示。
雷达目标接入:支持对雷达识别目标的接入功能,可通过雷达的目标协议或者SDK等方式实现对接。云台镜头控制:支持对云台镜头协议的集成,或者与视频系统的接口对接功能,实现对云台、镜头的控制。雷光联动算法:具备光电设备对雷达目标的持续跟踪以及方位、视野调整等能力。
2.2 微波探测和监控联动服务
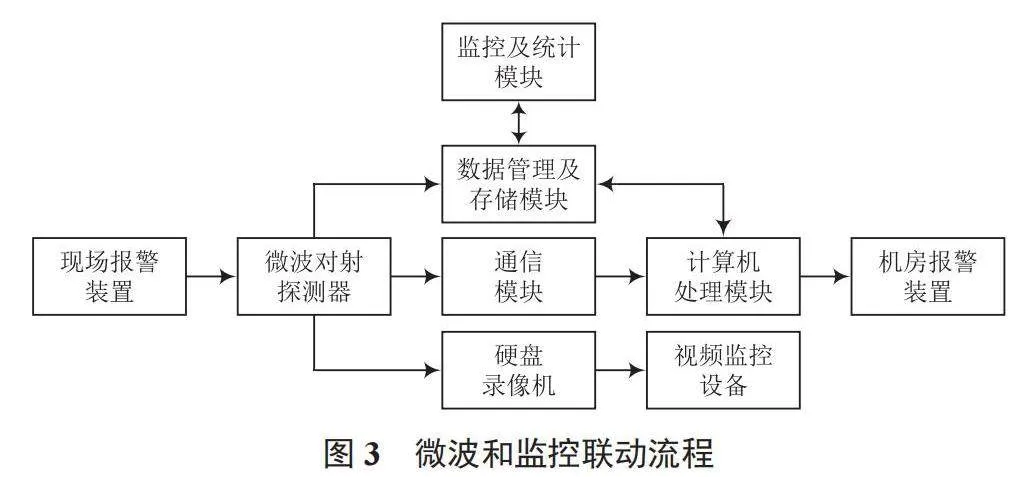
微波入侵报警设备与视频监控联动系统,包括多个微波对射探测器,多个微波对射探测器的监测空域相连呈环形或相连成一片;每个微波对射探测器的监测空域附近分别设有摄像头,该摄像头的监测空域可覆盖对应的微波对射探测器的监测空域;每个微波对射探测器分别与硬盘录像机和对应的监测空域现场报警装置相连;每个摄像头分别与视频监控设备相连,硬盘录像机与视频监控设备相连,视频监控设备与计算机的视频监控处理模块相连,计算机的视频监控处理模块与机房报警装置相连。本研究的目的在于提供一种响应速度快、能实时追踪到微波对射探测器发出警报现场画面的微波周界与视频监控联动系统。
2.2.1 联动流程
微波和监控联动流程如图3所示。
2.2.2 联动原理
当检测到有目标入侵时,微波入侵探测系统发送报警信号至报警主机,报警主机接收后将报警信号传送给平台服务器;平台接收到报警数据后,立刻调出距离最近的双光谱热成像网络云台摄像机或球机,将镜头转向调校好的预置位或者巡航路径来监视相关的防区。当监控平台接收到周界报警信息时,会根据后台设置的报警时间鸣响报警声,及自动弹出发生报警位置的监控画面。
2.2.3 联动实现
微波入侵探测系统与监控的联动方式通常有以下两种:
(1)前端物理连接联动(通过485信号传输),微波入侵探测系统报警信号(开关量)直接接入对应的摄像机报警输入接口。这样连接的优点是:由于信号传输距离短,联动反应快,不会出现延迟。
(2)微波入侵探测报警信号传输至控制中心后通过报警主机控制软件来实现联动(通过网络传输)。
网络TCP/IP传输是如今较为常见的传输方式,软件控制界面较为清晰,可选择的功能设置较多,如可以设置自动录像、自动抓拍、自动存储等。微波和视频联动如图4所示。
3 算法设计
3.1 入侵场景
三种入侵场景如下:
(1)雷达+电子围网:攀爬、触网;
(2)雷达+电子围网:翻越、钻网;
(3)雷达+光电:穿越阻断围栏。
3.2 雷达+电子围网:攀爬、触网
根据雷达提供的围网外侧最后一个航迹点,结合电子围网的报警信息,获取第x号主机n防区,判断该航迹点是否落在报警防区的范围内。如果是则取该点在围网的投影点为入侵位置,否则取围网中点。假设雷达航迹信号在围网附近丢失前的最后一个点P1提供的方位角为θ1和目标距离为m1,雷达所在经纬度为(lon_lei,lat_lei),雷达初始方位角为θ_lei。单个报警主机对应50个防区,距离2 km,每个防区精度40 m,从围网起点开始,每40 m放置一个柱子,已知每个柱子的经纬度。在米勒投影的地图上,将经纬度转换为平面坐标的算法如下:
L=6 381 372*π*2;//地球周长
W=L;//平面展开后,x轴等于周长
H=L/2;//y轴约等于周长一半
mill=2.3;//米勒投影中的一个常数,范围大约在±2.3
之间
dToRadar=cos(abs(θ1)*π/180)*distance;//计算目标点距离雷达的水平距离
firstNum=(x-1)*50+n;
secondNum=(x-1)*50+n+1;//计算报警防区2个柱子的编号(从1开始)
(firstNum-1)*40lt;dToRadarlt;firstNum*40//判断目标点是否在防区范围内
若在范围内,则计算投影点经纬度。
计算角距离:δ=m1/R。
计算经纬度:
lat=asin(sin(lat_lei)*cos(δ)+cos(lat_lei)*sin(δ)*cos(θ_lei)),
lon=lon_lei+atan2(sin(θ_lei)*sin(δ)cos(lat_lei), cos(δ)-sin(lat_lei)*sin(lat))
若不在范围内,则计算围网中点。使用米勒投影算法将该防区的起止经纬度转平面直角坐标。
转弧度:x=经度*π/180,y=纬度*π/180
米勒投影转换:y=1.25*log(tan(0.25*π+0.4*y))。
弧度转实际距离:
x=(W/2)+(W/(2*π))*x,y=(H/2)-(H/(2*mill))*y
由此得出起点(x1, y1)、终点(x2, y2)。
获取两点之间的中点:(x3, y3)=(x1+x2)/2+(y1+y2)/2。
将中点转经纬度:
弧度_x3=(x3-W/2)*2π/W,
弧度_y3=((H/2-y)*2*mill)/H,
弧度_y3=(atan(exp(lat/1.25))-0.25*π)/0.4
计算围网中点经纬度:
lon=弧度_x3*180/π,lat=弧度_y3*180/π
3.3 雷达+电子围网:翻越、钻网
该场景电子围网不会触发报警,由雷达在围网外侧最后一个航迹点和入侵后在围网内测的第一个点迹来构成报警条件,最终以入侵后在围网内测的第一个点迹在围网的投影点作为入侵位置。
假设雷达航迹信号在围网附近丢失前的最后一个点P1提供的方位角为θ1和目标距离为m1,入侵后的第一个点P2提供的方位角为θ2和目标距离为m2,雷达所在经纬度为(lon_lei,lat_lei),雷达初始方位角为θ_lei。判断是否入侵将在后文进行介绍。
地球赤道半径近似值:R=6 371 393 m。
同3.2节,先将各种经纬度转弧度后再进行以下计算。
计算角距离:δ=m1/R。
计算P1经纬度:
lat_p1=asin(sin(lat_lei)*cos(δ)+cos(lat_lei)*sin(δ)*cos(θ1)),
lon_p1=lon_lei+atan2(sin(θ1)*sin(δ)*cos(lat_lei), cos(δ)-sin(lat_lei)*sin(lat_p1))
同理可得P2经纬度(lon_p2, lat_p2)。
计算P1和P2两点间的距离:
cos=cos(lat_p1)*cos(lat_p2)*cos(lon_p1-lon_p2)+sin(lat_p1)*sin(lat_p2), d=acos(cos)*R
若d超过系统设定的某个最大距离,则认为该数据无效,不构成报警条件;若d在距离范围内,则计算P2在围网的投影点P3。
计算目标点与雷达的水平距离:
dToRadar=cos(abs(θ1)*π/180)*distance
计算角距离:δ=dToRadar/R。
计算投影点经纬度:
弧度_lat_p3=asin(sin(lat_lei)*cos(δ)+cos(1at_lei)*sin(δ)*cos(θ_lei)),
弧度_lon_p3=lon_lei+atan2(sin(θ_lei)*sin(δ)*cos(lat_lei), cos(δ)-sin(lat_lei)*sin(lat)),
lon_p3=弧度_lon_p3*180/π,
lat_p3=弧度_lat_p3*180/π
3.4 雷达+光电:穿越阻断围栏
雷达发现目标之后,根据雷达提供的方位角θ_hor和目标距离m1计算此时雷达的俯仰角θ_ver;根据目标距离m1和目标高度h1计算视场角θ_fov;光电根据θ_hor、θ_ver、θ_fov三个角度,控制云台对目标进行定位。定位之后对目标进行检测,如果目标为人,结合雷达提供的目标信息计算到目标已经入侵之后,以该点作为入侵位置进行报警。
雷达默认距离地面高度为7.5 m,光电默认距离地面高度为8 m。假设雷达所在的经纬度为(lon_a,lat_a),目标经纬度为(lon_b,lat_b),计算光电的绝对方位角:θ_光电=光电初始方位角+光电镜头此时的水平角;计算目标的绝对方位角:
lat_a=lat_a*Math.PI/180,
lng_a=lng_a*Math.PI/180,
lat_b=lat_b*Math.PI/180,
lng_b=lng_b*Math.PI/180,
θ_目标=sin(lat_a)*sin(lat_b)+cos(lat_a)*cos(lat_b)*cos(lng_b-lng_a),
θ_目标=sqrt(1-θ_目标*θ_目标),
θ_目标=cos(lat_b)*sin(lng_b-lng_a)/θ_目标,
θ_目标=asin(θ_目标)*180/π
得出光电水平所需偏转角:
θ_偏转=θ_目标-θ_光电
计算光电的水平角:
θ_hor=光电镜头此时的水平角+θ_偏转
计算光电的俯仰角:θ_ver=asin(8/m1)。
计算光电的视场角:θ_fov=(atan(h1/m1)*180/π)*2*100。
判断雷达目标点位是否入侵时,采用射线法,从目标点出发引一条射线,计算这条射线和多边形所有边的交点数目,如图5所示。若结果是奇数,则说明在区域(多边形)内;若结果是偶数,则说明在区域(多边形)外。
同3.2节,先将各种经纬度转弧度后再进行以下计算。
假设:循环操作,每次取多边形的任意一条边,边上两点分别为(x1, y1)、(x2, y2),雷达目标点为(x0, y0),交点数目为nCross=0
若同时满足以下2个条件,则nCross+1。
条件1:x1≤x0<x2或x2≤x0<x1;
条件2:y0lt;(y2-y1)/(x2-x1)*(x0-x1)+y1。
最后判断若nCross%2≠0,说明是奇数,则该点落在区域内。同3.3节,通过该点计算入侵点的位置经纬度。
4 结 语
本文通过小目标雷达+震动围网+视频目标识别多设备融合实现了周界入侵监测0漏报、0误报/每日监测目标 ,在测试环境下实行0漏报、0误报,有效提高周界安防技术水平。
参考文献
[1]冉营丽.用于空中监视和防御的现代雷达技术[J].现代雷达,2022,44(7):102-104.
[2]王建明.面向下一代战争的雷达系统与技术[J].现代雷达,2017,39(12):1-11.
[3]王国宏,何友,裴晓黎.多雷达系统描述和相关及分析的模糊图方法[J].雷达与对抗,1995,15(1):5.
[4]吴双彤,刘兆华.基于嵌入式计算机及网络技术的雷达系统软件的设计[J].电子技术与软件工程,2016,5(23):65.
[5]占尹秀.激光雷达数据过滤算法开展阶层式分类研究[J].四川建材,2019,45(7):66-67.
[6]胡士强,张天桥.基于雷达和光电传感器的融合跟踪[J].系统工程与电子技术,2002,24(8):31-33.
[7]杜子亮.双(多)基地雷达系统应用分析[J].雷达与对抗, 2016,36(4):5-7.
[8]麻文斌,郑维彦. 一种雷达和光电联动的控制系统及方法:CN113362550A [P]. 2021-09-07.
[9]虞志坚,张军,陶润文,等. 一种基于物联网技术的电子围栏联动系统:CN209993060U [P]. 2020-01-24.
[10]陈甜甜,赵洋.国外领先安防巡逻机器人发展现状概述[J].中国安防,2021,16(11):109-116.
[11]殷琪林,王金伟.深度学习在图像处理领域中的应用综述[J].高教学刊,2018,4(9):72-74.
[12]汪新坤,曹乐,阚秀,等.基于iForest与KDE的雷达目标最优距离门估计[J].导航定位学报,2022,10(3):78-86.
作者简介:娄占磊(1985—),男,本科,高级工程师,研究方向为安防系统集成。
雒崇安(1986—),男,本科,高级工程师,研究方向为安防系统集成。
王柳彭(1989—),男,本科,工程师,研究方向为安防系统集成。
夏 博(1993—),男,本科,工程师,研究方向为软件开发。
猜你喜欢
雷达学报(2023年5期)2023-11-06 08:58:22
大自然探索(2023年7期)2023-08-15 00:48:21
电子制作(2019年15期)2019-08-27 01:12:02
航天电子对抗(2019年4期)2019-06-02 08:22:36
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
成都信息工程大学学报(2017年4期)2018-01-22 02:08:18
火控雷达技术(2016年3期)2016-02-06 02:30:26
火控雷达技术(2016年2期)2016-02-06 02:28:53
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
自动化博览(2014年7期)2014-02-28 22:32:25
