
自旋翼无人机纵向解耦控制技术研究
2024-08-28 00:00:00王震黄一敏王安航
机械制造与自动化 2024年2期





摘"要:针对对象自旋翼无人机,提出在干扰下如何实现解耦控制。由于对象无人机空中段飞行过程中对外界干扰十分敏感,很容易在干扰下激发高度和速度间的耦合,现有控制策略优先考虑了速度控制,而牺牲了高度控制性能,所以导致高度控制鲁棒性较差。针对此特性,提出升降速率指令内回路控制结构以增加系统对高度差的反应能力,并且在桨盘控制通道加入高度反馈以弥补油门控制的不足。通过仿真测试改进策略的解耦性能以及鲁棒性,验证了该策略是合理且可行的。
关键词:自旋翼无人机;高度速度耦合;纵向控制策略
中图分类号:TP391.9""文献标志码:B""文章编号:1671-5276(2024)02-0229-05
Research on Decoupling Strategy of Longitudinal Control of Autogyro UAV
WANG Zhen, HUANG Yimin, WANG Anhang
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Abstract:For autogyro UAV, a strategy to realize decoupling control under interference is explored. Due to the great sensitivity of UAV to external interference in its flight, the coupling between altitude and speed tends to be easily stimulated under interference. The existing control strategies prioritize speed control at the sacrifice of altitude control performance, leading to poor robustness of altitude control. This paper, therefore, proposes an internal loop control structure of speed up and down command to increase the system's response to altitude difference, and height feedback is added to the propeller control channel to make up for the shortage throttle control. The test and simulation on the decoupling performance and robustness of the improved strategy are conducted, which verifies the reasonable ness and feasiblity the strategy.
Keywords:unmanned autogyro;coupling between altitude and velocity;longitudinal control strategy
0"引言
自转旋翼机(简称为自旋翼)是一种以无动力旋翼为主要升力装置的旋翼飞行器,依靠空气来流驱动旋翼自转提供升力[1],其主要操纵包括桨盘纵向倾角、桨盘横向倾角和方向舵,其外形上与直升机类似,起飞方式与固定翼飞机类似。自旋翼起飞前发动机处于怠速,此时旋翼为有动力旋翼,依靠发动机驱动旋转;达到初始转速后,断开旋翼与发动机间的传动,发动机开大油门,通过螺旋桨驱动飞行器向前滑行,飞行器加速并增加旋翼桨盘空气流量,以此驱动旋翼自转,提供升力,待克服重力后便可离地。由于其自转特性,旋翼传到机身的转矩很小,不需要额外的转矩平衡机构[2]。
无人机是当前的研究重点,也是研究难点。自旋翼的无人化面临着建模置信度高、控制效果差等难题。随着研究的深入,研究人员已逐步提高了自旋翼无人机的建模置信度,也越来越聚焦于建模与控制中的细节问题[3]。
自旋翼无人机由于其独特的气动构型,使其在控制策略的设计与研究上,不同于传统的固定翼与直升机控制方案,需要根据其控制特点制定合适的控制策略。本文主要针对自旋翼无人机纵向段的控制策略展开研究。
1"问题描述
1.1"研究对象及问题描述
对象自旋翼无人机气动构型简单,构成部件包括无动力旋翼、推力系统、机身、方向舵和起落架等,操纵舵面包括:桨盘纵向倾角、桨盘横向倾角、方向舵和发动机油门开度。
本文研究的对象无人机为常规气动布局,气动构型如图1所示,总质量约500kg,设计飞行速度30m/s。
自旋翼无人机纵向操纵响应的耦合现象描述如下:当桨盘纵倾角度不变时,通过油门大小改变飞行速度,导致桨盘平面内进气量增加,旋翼升力增加使得无人机进行爬升;当桨盘纵向倾角保持不变时,通过桨盘纵倾角度改变飞行高度,必然会使桨盘迎面阻力增加,减小速度[4]。综上所述,自旋翼无人机纵向操纵通道耦合严重,单一操纵量输入会引起多个状态量的变化,故在无人机巡航过程中若同时接入多个纵向状态量的控制,则会出现相互耦合的现象,影响控制的品质。
1.2"现有控制策略分析
通过上述描述可知,对象无人机的两个纵向操纵通道可分别实现对高度和速度的控制,相应也就有两种控制方案:利用油门控制速度、桨盘纵倾角度控制高度以及利用油门控制高度、桨盘纵倾角度控制速度。油门控速、桨盘纵倾控高的方案与传统的固定翼无人机控制方案类似,通过仿真发现,此方案难以保证速度控制品质,相应也就难以保证稳定的旋翼转速,且浅下滑段会对高度产生耦合影响,从而影响自旋翼类飞行器的飞行状态,导致高度和速度之间的耦合影响难以消除[5]。
分析对象无人机线性模型发现,桨盘纵倾角度变化对速度的影响较大,速度对俯仰角变化敏感,故为了保证速度控制的精度,实验室现有方案采取了利用桨盘纵倾角度控制速度、油门控制高度的方案,保证了速度控制精度,减少了其对高度的耦合影响。但在不确定性环境干扰下,特别是垂向风干扰,两者的耦合会加剧,本文将在现有方案上进行改进,减轻耦合影响。
2"特性分析
2.1"操纵耦合特性分析
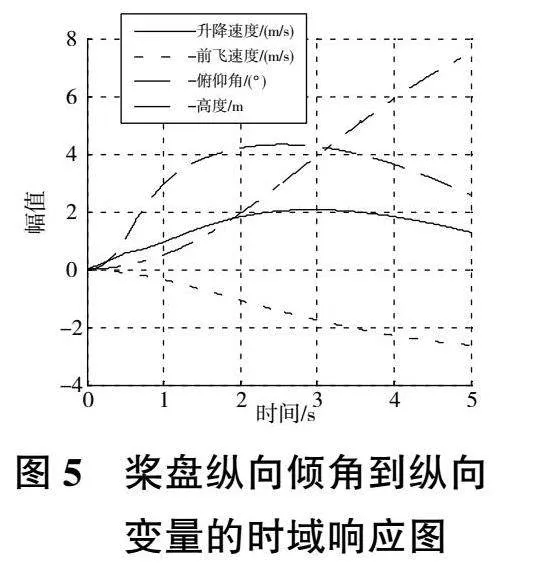
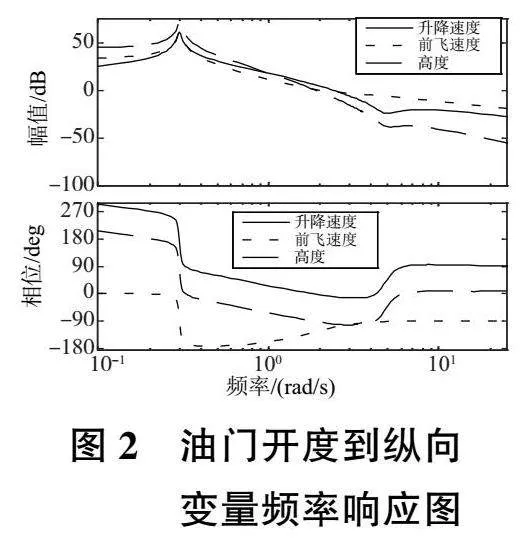
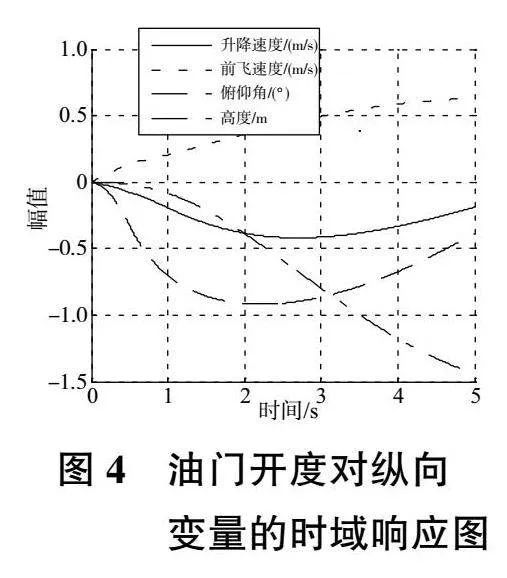
自旋翼无人机共4个操纵输入量,其中油门开度和桨盘俯仰操纵属于纵向操纵量,主要影响无人机的前飞速度、高度和升降速度等纵向状态。分别单独操纵油门通道和桨盘纵向通道得频率响应如图2—图5所示。
从频域响应来看,油门开度在低频段对4个纵向变量有一定的增益,但普遍较桨盘纵向倾角低,油门通道较桨盘纵向通道响应缓慢,跟踪性能差。
虽然两个操纵通道对自旋翼的纵向飞行状态均会产生一定的影响,但是两个操纵通道之间不会产生额外的耦合影响。当油门开度变化时,桨盘纵向倾角作为自旋翼无人机的操纵量输入,不会因为高度或者速度变化而导致倾角的改变,所以两个操纵量之间并不存在耦合,而是操纵输入后,会同时改变飞机某个状态,使得控制上难以解除操纵量带来的耦合影响。
2.2"状态耦合特性分析
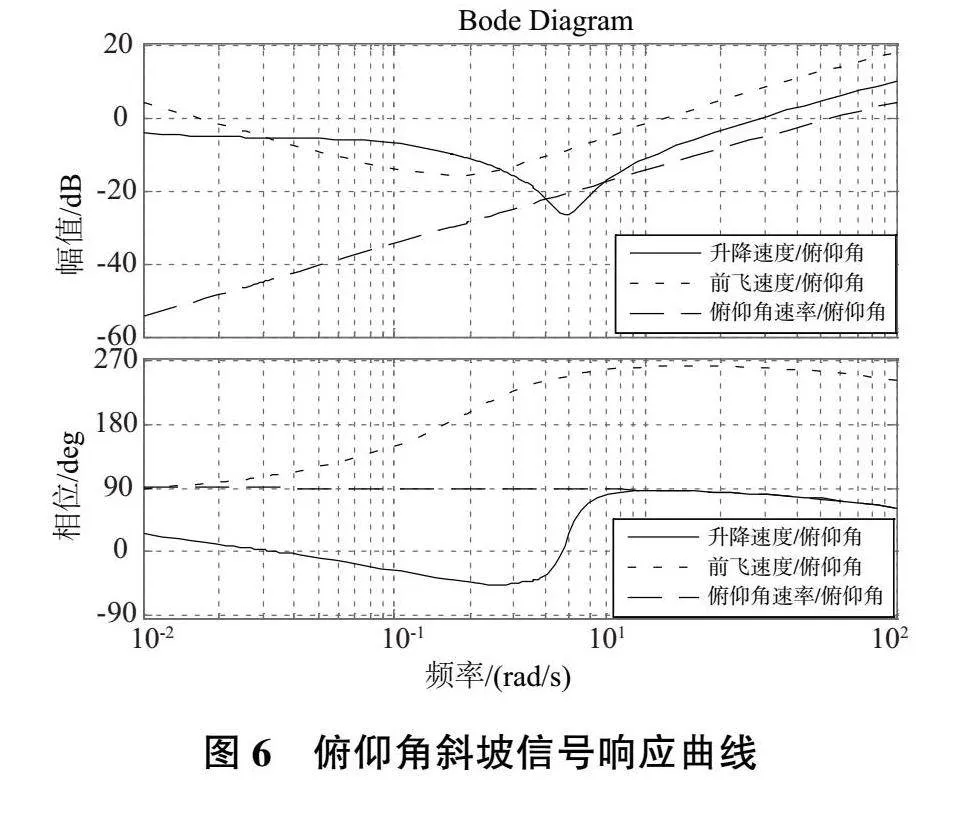
分析纵向状态变量俯仰角、升降速度及前向速度之间的频率特性。俯仰角斜坡信号响应曲线如图6所示。
从频率响应图中可以看出,升降速度、前飞速度、俯仰角之间均存在强耦合,俯仰角对升降速度和前向速度影响较大,尤其是给定俯仰角斜坡信号时,自旋翼机前向速度与升降速度之间存在特定的关系[6]。
机理分析:直接操纵桨盘俯仰倾角会改变旋翼面与机体间的夹角,进而改变来流的入流角度。当入流角度增大时,一方面会使旋翼升力增加,同时改变旋翼拉力在飞行速度方向的分量,使得飞行阻力增加[7],从而减小飞行速度,另一方面,俯仰角增加会减小旋翼拉力在竖直方向上的分量,因此合适的制导策略可以使旋翼机在竖直方向上的分力动态稳定,从而升降速度可以趋于稳定,而前向速度逐渐减小。
3"油门控制策略改进
油门控制通道原采用的是高度阻尼内回路的结构,利用升降速率作为微分环节来提高系统阻尼,本质结构为高度和升降速率的内外环并联结构。本文调整为基于指令内回路的高度控制方案,实质为高度与升降速率的内外环串联结构,通过控制升降速率达到稳定高度目标。下面将介绍其设计过程。
3.1"控制律设计
自旋翼无人机独特的气动构型使得桨盘纵向倾角相对于速度和高度的影响均大大高于油门的影响[8],而速度对于保证自旋翼无人机的稳定性至关重要。因此不同于固定翼无人机的控制策略,自旋翼无人机采用桨盘控速、油门控高的思路来保障速度控制的优先级。
1)控制结构设计
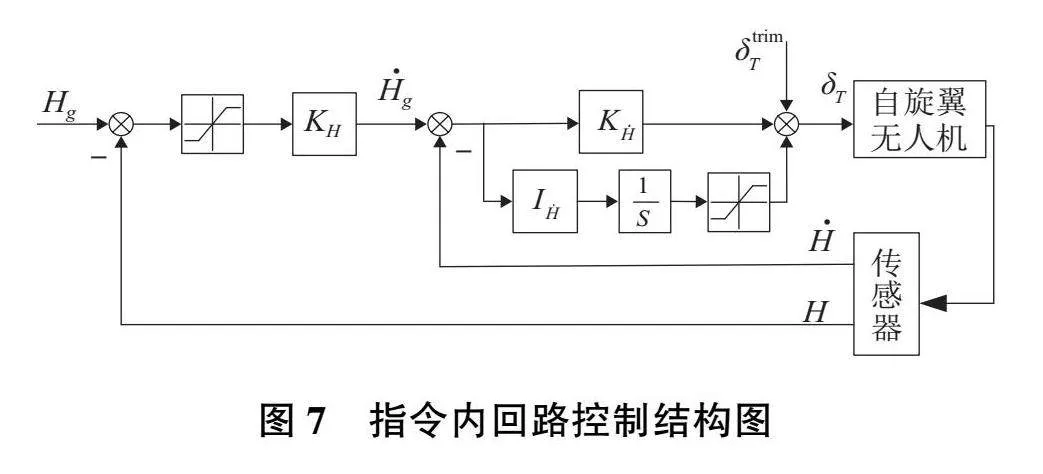
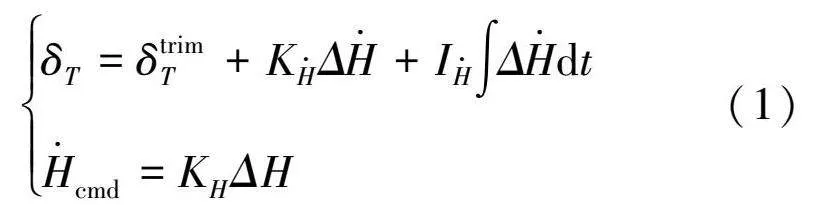
基于下沉率指令内回路的控制律以升降速率为实际参控量,对升降速率进行PI比例积分实现精确跟踪,而升降速率指令由外环的高度差生成,其控制律表达式如下所示。
δT=δtrimT+KH·ΔH·+IH·∫ΔH·dt
H·cmd=KHΔH(1)
当实际高度大于指令高度使得高度差变大时,此时的升降速率应当为负值,若实际高度低于指令高度使得高度差变小,此时的升降速率应当为正值,所以指令表达式中系数应为负相关。控制结构如图7所示。
2)控制参数设计——升降速率回路
升降速率控制回路结构比较简单,是PI控制器串联结构,在整个控制参数设计过程中应当优先进行。此时外环路断开,控制律表达式仅包括
δT=δtrimT+KH·ΔH·+IH·∫ΔH·dt(2)
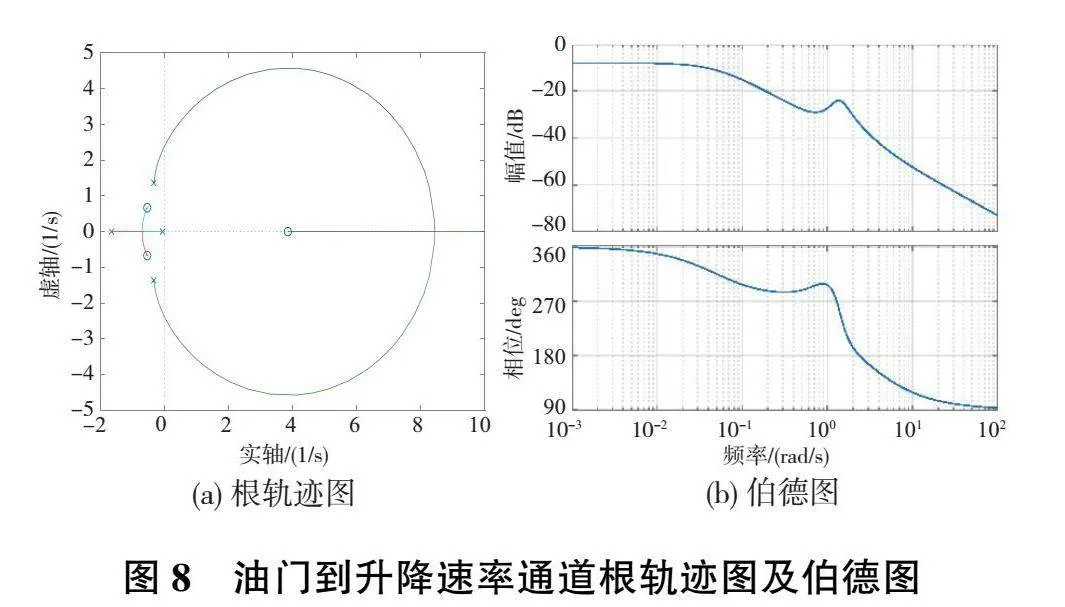
根据上述表达式,需提取油门通道至升降速率的传递函数,通过动量法得到的线性模型可以获得其传递函数,其对应的根轨迹以及伯德图如图8所示。
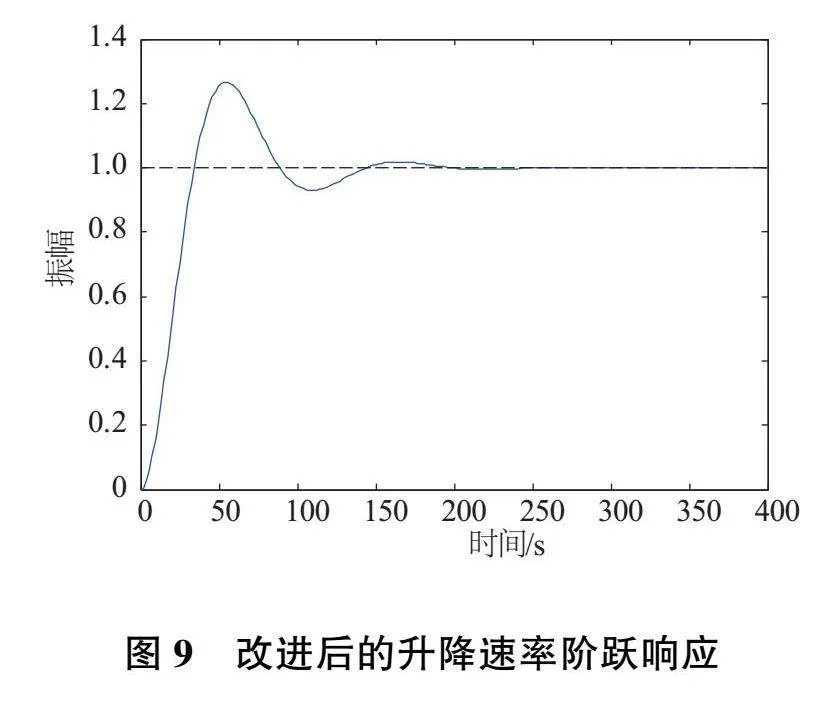
通过根轨迹调节得到对应的控制系数KH·=7,IH·=0.2。此控制系数下的油门至升降速率通道的阶跃响应曲线如图9所示。
经过PI控制调节后,系统的阶跃响应整体较好,一方面动态性能较好,响应较为迅速,另一方面系统稳态误差几乎为0,大大减小了系统误差。
3)控制参数设计——高度回路
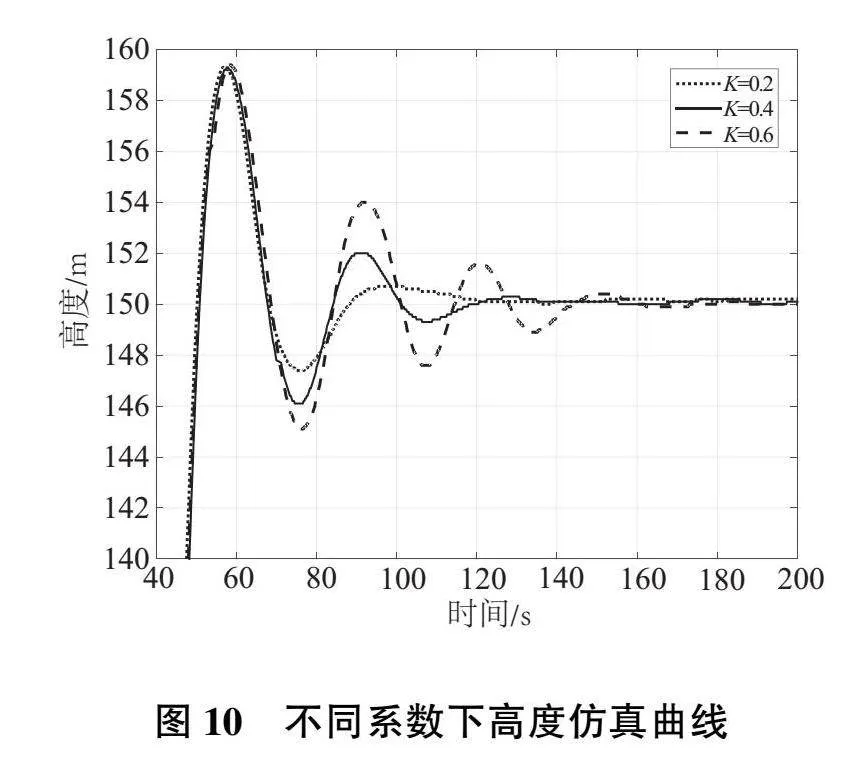
高度回路参数简单,可直接通过工程经验法进行整定,在不同的KH下进行仿真实验,效果如图10所示。
通过图10中飞行仿真曲线可以看出,高度外环参数选择0.4相对比较合适,过大会导致高度产生额外的振荡,过小则会使得动态响应变差,对高度差变化不够敏感。
3.2"控制效果验证
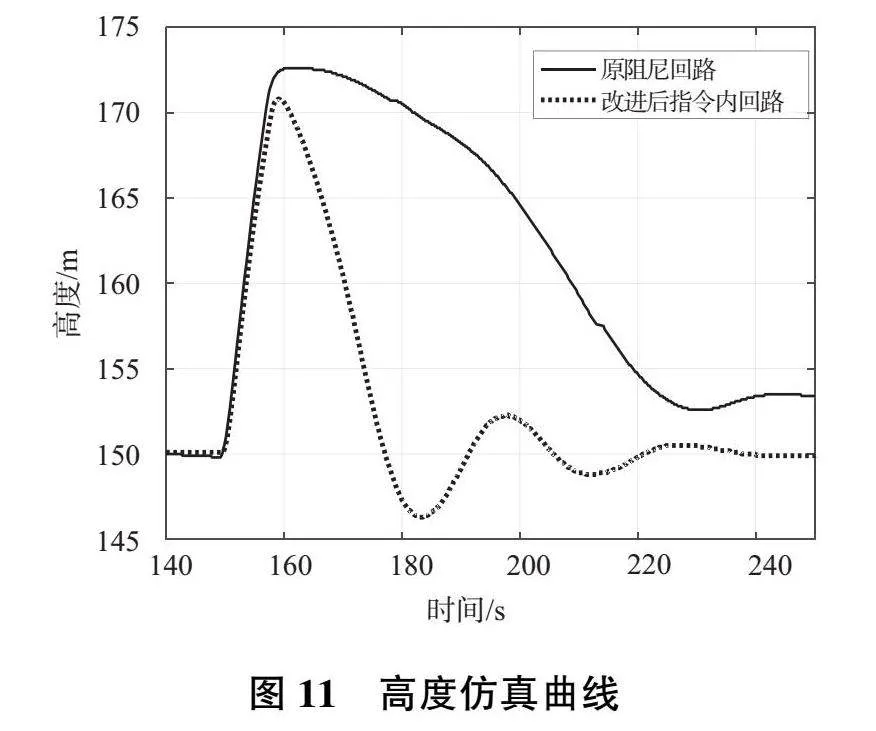
为了验证控制律改进的效果,本节主要从垂向风干扰不确定性角度展开测试,分析指令内回路控制结构的鲁棒性以及不足。与原控制相比,飞行曲线如图11、图12所示。
通过垂向风的测试发现,利用油门通道控制升降速度来稳定高度的控制策略,解决了在垂向风带来较大高度差后难以收敛的问题。在垂向风撤去后,高度能够迅速收敛,比原控制收敛时间减小了至少40s;但与此同时,高度收敛过程中,两者的耦合效应有所加剧,具体表现为同一时间下速度出现了约2~4m/s的波动,并且高度收敛至平飞高度附近时,同样出现了一定的波动。
4"桨盘控制策略改进
利用桨盘纵倾控制前飞速度表现出了较好的鲁棒性,速度控制能够适应较为复杂的飞行环境。这说明桨盘纵倾通道的控制能力相对较强,鉴于桨盘控制的优越性,本节的思路则是通过将状态量反馈到桨盘通道,来协调平飞过程中出现的耦合影响。
1)状态反馈量确定
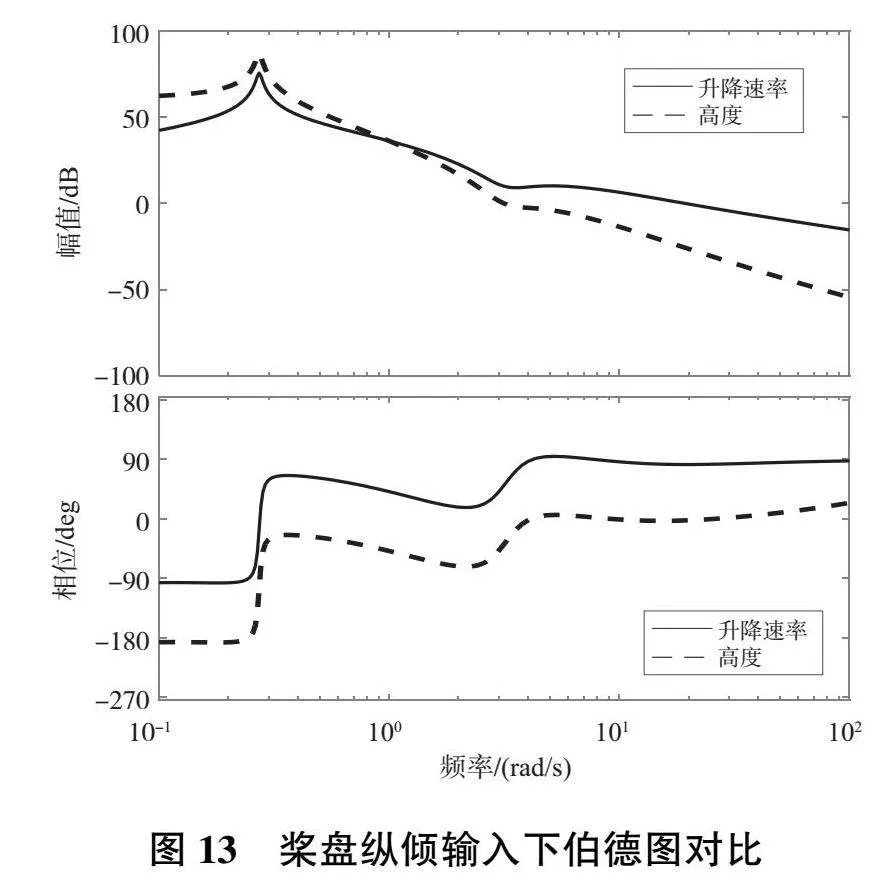
若要采用在桨盘通道加入反馈的改进策略,首先需要解决反馈何种状态量。通过此种方案目的是解决高度与速度间的耦合,理论上应当反馈高度,而升降速率也是导致高度变化的原因,故应当存在两种反馈方案,一种是反馈高度变化,另一种是反馈下沉率变化。桨盘通道输入下高度和升降速率的伯德图对比如图13所示。
通过图13曲线可以看出,低频段桨盘通道到高度幅值曲线处于较高的水平,说明桨盘通道对高度与升降速率相比稳态误差较小,动态响应的跟踪精度较高;中频段两者差异不大;高频段中,桨盘纵倾在高度的幅频曲线中处于较低的水平,说明桨盘纵倾协调高度能够有较好的抗干扰能力。
综上所述,反馈高度差至桨盘控制通道理论上应当比反馈升降速率有更好的效果,下面将按照此思路对桨盘控制策略进行调整。
2)控制律及其参数设计
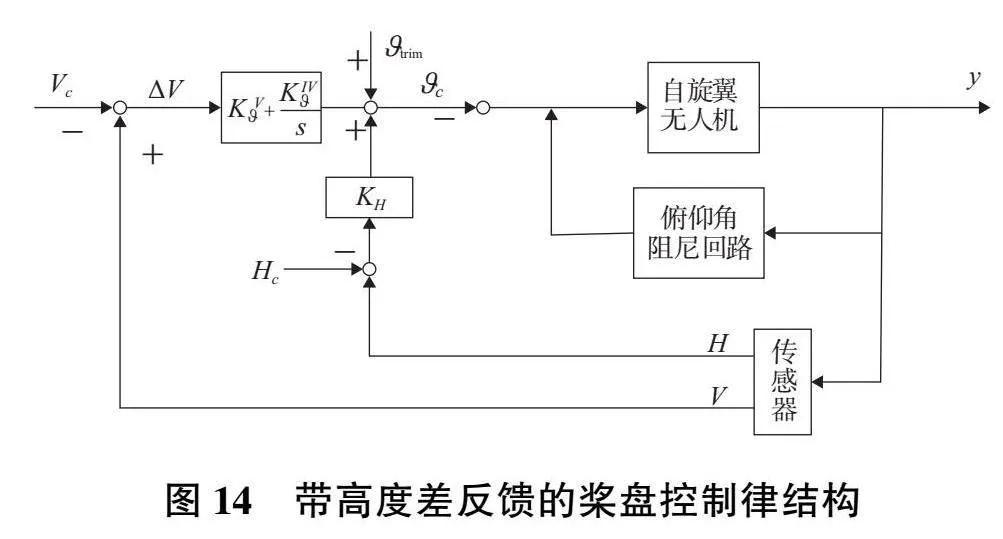
将高度差反馈至桨盘纵倾通道,通过桨盘纵倾来弥补油门控制通道的不足,协助实现高度的稳定,减少其与速度的耦合。加入高度差反馈后的桨盘通道控制律表达式如下。
δe=Ke(-c)+Kωzeωz+δtrime
c=trim+KIV∫ΔVdt+KVΔV+KHΔH(3)
式中KHΔH是加入的高度差反馈项,通过桨盘纵倾调整俯仰角以实现无人机对高度差的反应。控制结构如图14所示。
此控制方案中,只有一个参数:反馈系数。由于参数单一,较为简单,没有必要按照控制律设计流程重新设计,且方案改进的目标是解决在飞行过程中外界环境干扰下的耦合影响,针对性和目的性很强,故可直接用工程经验法进行参数整定。
工程经验设计主要是通过半物理仿真实验,通过模拟实际飞行状况,找出合适的控制系数。该种方案操作简单且真实反映飞行过程的动态特征,更加符合实际应用需求。对象无人机控制的主要难点在于风干扰下难以抑制耦合,所以在使用工程经验法进行参数整定时,本文创新性地提出了基于风干扰下的参数整定方法,加入对象无人机较为敏感且难以抵御的外界干扰:垂向风。通过仿真得到的反馈系数为0.4。
5"仿真验证
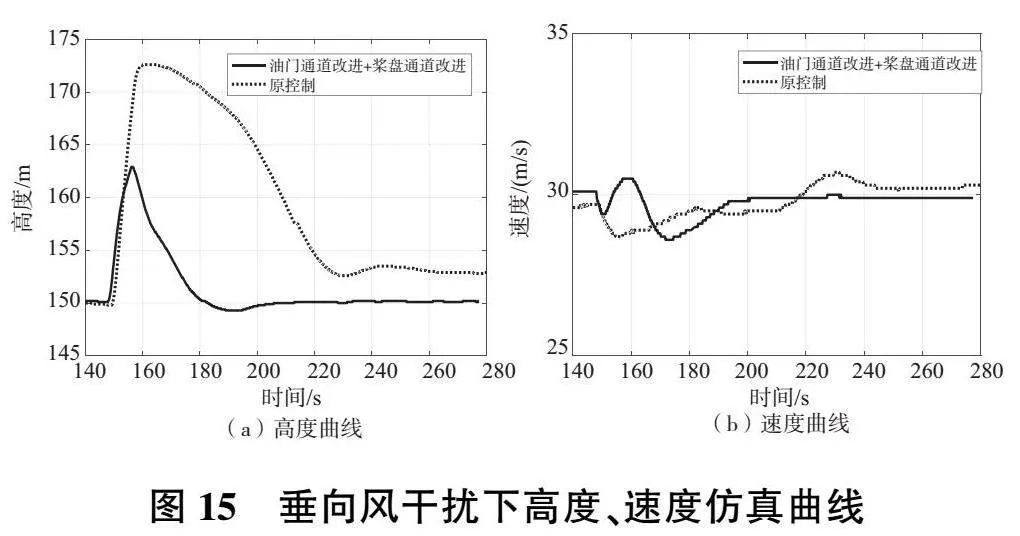
通过对象无人机的非线性6自由度动力学模型进行综合仿真验证,针对对象无人机对外界风干扰敏感的特性展开验证测试,主要是风干扰,同时在实际飞行过程中,还伴随着燃料消耗带来的质量质心偏差,可以在仿真中用修改质量质心数据来模拟,垂向风干扰下高度、速度仿真曲线如图15所示。
图15中实线为改进后的纵向控制策略仿真效果,虚线为原控制策略仿真效果。可以看出,通过控制策略的改进,对象无人机在出现风干扰时,高度和前飞速度的波动情况明显好转。动态响应中垂向风干扰时间段中最大高度差明显较少,高度收敛时间大大缩短,速度波动整体相对较小,受高度的耦合影响较小。稳态响应中高度和速度基本都不存在静差,两者皆很稳定。说明控制策略改进效果明显,能够大大减少干扰下的耦合影响。
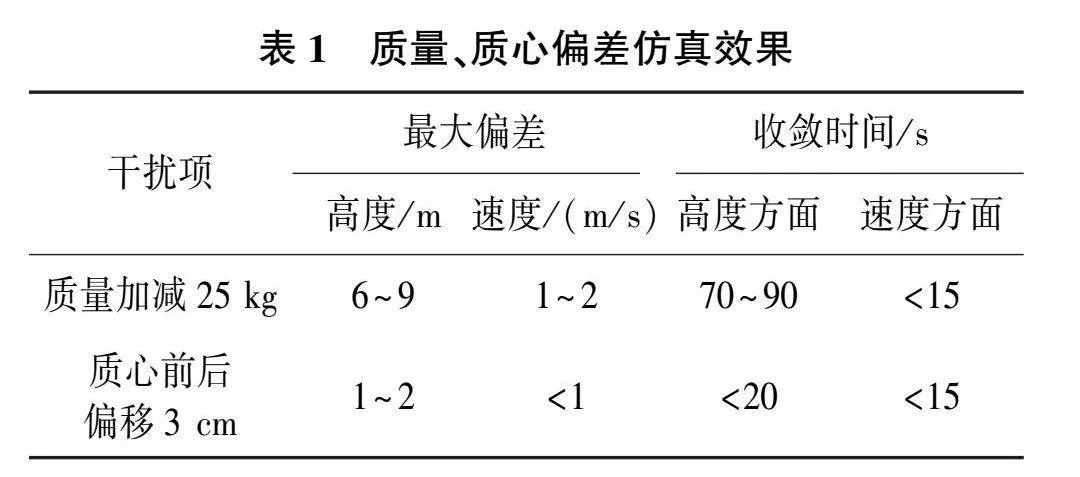
为了进一步验证控制策略改进后的解耦效果,加入质量、质心偏差,得到的仿真结果见表1所示。
上述仿真数据表明,纵向控制策略的改进,一方面对垂向风干扰下产生的耦合有明显的抑制,与原控制相比性能提升明显,另一方面在质量、质心偏差的干扰下,表现良好,表明了当前纵向解耦控制策略的合理性以及可行性。
6nbsp;结语
空中巡航段是衡量无人机飞行性能的重要阶段,同时也是为后续着陆段做准备的阶段,对自旋翼空中段解耦控制的设计显得至关重要,因此本文的纵向解耦控制策略起到了承前启后的作用。
本文根据对象无人机的耦合特性,针对其在外界干扰下的飞行性能,尤其是风干扰,提出了对两个纵向控制通道的改进策略,通过油门控制升降速率的指令内回路结构,增加了对象自旋翼机对高度差的敏感度,提高了其抗风性能,并根据其桨盘纵倾通道控制灵敏性,将高度差反馈到该控制通道上,进一步减少了干扰对高度和速度产生的耦合影响
最后,通过搭建6自由度模型、非线性仿真实验进行风干扰、质量质心等干扰测试,仿真结果验证了当前解耦策略具有一定的鲁棒性,提高了无人机空中段的飞行性能。
在实际的应用中,需要具体分析自旋翼机的敏感特性,找出耦合较为严重或者干扰下易发散的状态,将其作为反馈量反馈到操纵通道,并对比不同控制结构的效果,从而设计合适的解耦策略。
参考文献:
[1] 李鹏程. 无人自转旋翼机自动着陆控制技术研究[D]. 南京:南京航空航天大学,2019.
[2] 姬天田. 自转旋翼无人机仿地飞行控制系统研究[D]. 太原:中北大学,2020.
[3] 程晓倩. 无人自转旋翼机建模与控制技术研究[D]. 厦门:厦门大学,2017.
[4] 林清,蔡志浩,闫坤,等. 俯仰操纵方式对自转旋翼机操稳特性的影响[J]. 北京航空航天大学学报,2016,42(11):2454-2465.
[5] 邢炜烽. 自转旋翼机关键技术的分析与研究[D]. 南京:南京理工大学,2020.
[6] 王俊超,李建波,韩东. 自转旋翼机飞行性能理论建模技术[J]. 航空学报,2014,35(12):3244-3253.
[7] LEISHMAN J G. Development of the autogiro:a technical perspective[J]. Journal of Aircraft,2004,41(4):765-781.
[8] PAW Y C. Synthesis and validation of flight control for UAV[D]. Minneapolis:University of Minnesota,2009.
收稿日期:20221014
