
基于GA-LSTM的轮轨力连续测量研究
2024-08-28 00:00:00汪卫陈建政吴越
机械制造与自动化 2024年4期
关键词:神经网络
























摘 要:为降低连续测力轮对在横向力和垂向力解耦过程中产生的系统误差,基于神经网络的原理,提出一种基于GA-LSTM的轮轨力连续测量方法。研究表明:相比于GB/T5599—2019中的轮轨力测量方法,本轮轨力连续测量方法具有更高的精度和效率。将本轮轨力连续测量方法运用于国内某运营地铁线路的轮轨力信号实测,测试数据验证了其有效性。
关键词:测力轮对; 神经网络; GA-LSTM; 轮轨力测量
中图分类号:U270.1 文献标志码:A 文章编号:1671-5276(2024)04-0111-08
Continuous Measurement of Wheel Rail Force Based on GA-LSTM
WANG Wei, CHEN Jianzheng, WU Yue
(State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
Abstract:In order to reduce the systematic error in the decoupling process of lateral and vertical forces of continuous instrumented wheelsets, a continuous measurement method of wheel-rail forces based on GA-LSTM is proposed according to the principle of neural network. The study shows that compared with the method in the national standard GB/T 5599-2019, the proposed method has higher accuracy and efficiency, and the measured data of wheel-rail forces gained by the method in a domestic operating subway line verify its effectiveness.
Keywords:instrumented wheelset; neural network; GA-LSTM; measurement of wheel rail force
0 引言
随着城市轨道交通技术的不断发展,城市轨道车辆的运行速度和运载量均有很大提升,然而随之而来的安全隐患也不可忽视[1]。因此,对于列车安全性的监测尤为重要,而轮轨力作为列车安全性的主要测试量,如何对其开展精确高效的在线监测值得深入研究[2]。
测力轮对是目前测量轮轨力最直接的方法,常用于轨道车辆的运行考核试验中。GB/T 5599—2019[3]的连续测力轮对方法(简称国标法)通过对测力轮对进行标定,确定测力轮对的静态标定系数矩阵,最后通过求解线性方程就可以求解出轮轨力。为了获得理想的灵敏度和线性度,并尽可能地减少交叉干扰以及各种可能的外界干扰,往往需要在测力轮对的加工、辐板刻度的划分、组桥方案的设计、组桥半径的选择、应变片的粘贴、组桥布线等各个环节上都要精益求精,耗费大量的人力与时间。为了解决此问题,近年来国内外诸多学者不断对测力轮对优化算法进行研究。陈建政[4]在测力轮对的有限元分析和静态标定试验的基础上,分析同一半径下不同组桥方式对电桥输出信号的谐波阶次与分量大小的影响,提出了一种不必考虑组桥位置应变受垂向力和横向力耦合干扰的最佳组桥方式及计算方法,这种方法由于高次谐波无法被完全抵消,桥路的输出只能近似于正余弦波,从而影响测量精度,且对轮对贴片位置的选择十分严格。CAZZULANI等[5]提出了一种在检测到临界运行条件(即脱轨系数Y/Q的大值)时提高轮轨力测量精度的方法,这种方法可应用于任何测力轮对,但只对非常规轮对有效,对于常规轮对则会导致较大的测量误差。TENG等[6]使用LFIM(轻量化轮轨力反演神经网络模型),利用铁道车辆的振动信号间接计算轮轨力,但该模型结构比较复杂且缺乏实测数据的验证。URDA等[7]利用ANN(人工神经网络)计算轮轴横向力并使用铁路车辆模型进行验证,能对轮轴横向力进行很好的识别,但该方法忽视了其内部的关联性,且需要对每个轮对都要建立一个模型。
测力轮对的横向桥和垂向桥的解耦是一个复杂的非线性问题[8],虽然国标法将之转化为线性问题,但由此产生的系统误差难以避免,而神经网络具有很强的解决非线性问题的能力,能够满足解决复杂非线性问题的要求。本文分别基于有限元仿真计算数据和试验台测力轮对标定数据,采用结合遗传算法的长短时记忆神经网络(GA-LSTM)的方法,建立轮轨力的神经网络计算模型,将模型结果和国标法计算结果进行对比,并在线路试验中对计算模型进行验证。
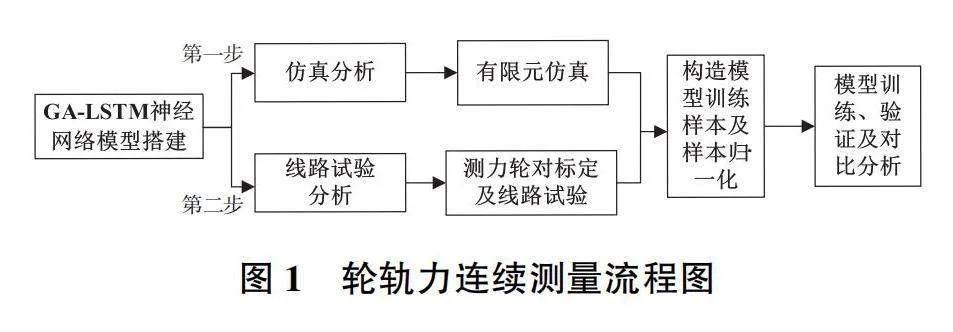
1 研究思路
本文的研究思路如图1所示。首先,分别搭建基于GA-LSTM方法的轮轨横向力和垂向力计算模型。然后,通过有限元软件建立轮对仿真分析模型,使用模拟的输入激励和特定半径幅板电桥的应变输出等数据构造训练样本。对样本进行归一化后放入神经网络中进行训练,探明辐板桥路应变输出和轮轨力之间的内在关系,并和采用传统国标法计算得到的轮轨力进行对比分析,进而初步验证本文计算方法的有效性。最后,基于测力轮对的实测数据,将基于GA-LSTM方法的轮轨横向力和垂向力计算方法应用于我国某地铁车辆实际运行过程中,并验证其使用效果。
2 GA-LSTM神经网络模型搭建
2.1 长短时记忆网络(LSTM)
LSTM的结构与标准RNN类似,都具有一种重复神经网络模块的链式结构称之为Cell(细胞)。LSTM的每个Cell都由遗忘门、输入门、输出门组成,通过3个门选择性地让信息通过,实现信息的保护和控制,从而达到实现长期记忆的目的[9]。
遗忘门的目的是决定上一个时刻的细胞状态c(t-1)中哪些要遗忘和哪些要保留,经过激活函数的处理得到一个范围0~1的信息保留比例ft。ft的值越大表示信息保留的越多,如式(1)所示。
ft=σ[Wf×h(t-1)+Uf×x(t)+bf](1)
式中:σ为激活函数Sigmoid函数;Wf、Uf为系数矩阵;bf为偏置矩阵;h(t-1)为隐藏状态;x(t)为输入数据。
输入门控制新信息加入到细胞状态c(t)的程度:
式中:Wi、Ui、Wc、Uc为系数矩阵;bc、bi为偏置矩阵;i(t)为当前时间步的信息保留比例;C′(t)为候选细胞状态。
输出门的目的是根据前两个门的计算结果求解这一时刻的隐藏状态h(t),如式(3)—式(4)所示。
式中:c(t)为细胞状态;o(t)为细胞状态对隐藏状态的影响权重;Wo、Uo为系数矩阵;bo为偏置矩阵。
2.2 基于GA-LSTM的轮轨力连续计算方法
超参数的选择对神经网络的性能有很大的影响。基于GA-LSTM的轮轨力计算就是使用GA算法对LSTM模型进行全局超参数寻优。通过GA算法搜寻最优的超参数组合,可以有效提高LSTM计算的精确度。首先,对数据进行预处理并根据选择的超参数生成初始种群,再将数据和初始种群输入LSTM神经网络模型进行训练和计算。然后,根据神经网络计算结果以及标签值计算每个个体的适应度值,根据适应度值选择个体生成新的种群并计算其适应度值,重复这一过程直到适应度值满足终止条件。最后,将得到的满足条件的超参数个体再输入神经网络就可以得到更为精确的计算结果。
2.3 基于GA-LSTM的轮轨力连续测量模型结构
1)GA遗传算法结构
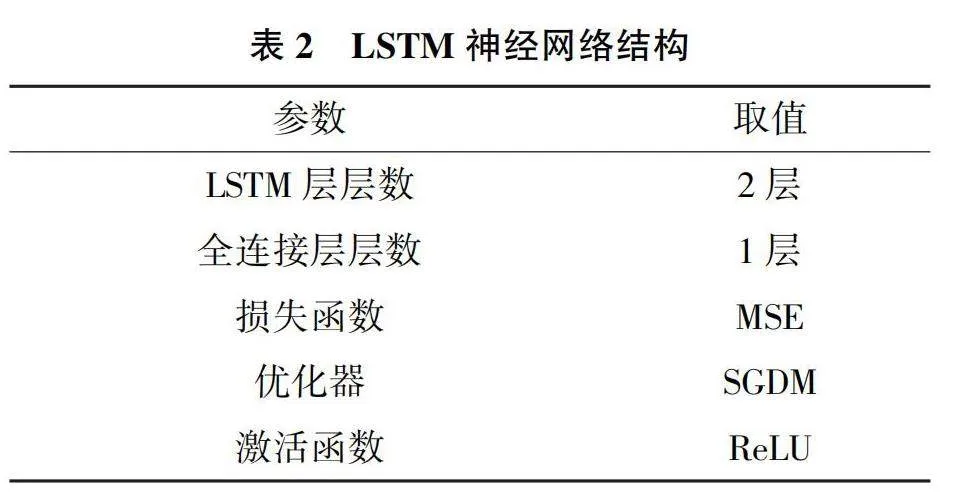
根据模型的结构以及优化器选择需要用GA算法寻优的超参数如表1所示。
使用实数编码方式对染色体进行编码,并随机产生长度为7的10个染色体,组成初始种群,各超参数的取值范围如表1所示。算法的交叉概率为0.5,变异概率为0.5,当适应度函数的值小于0.005或迭代次数达到10次时,寻优结束。
2)LSTM神经网络结构
模型是在Python3.8与Anaconda环境下,借助Pytorch工具包进行搭建的,模型结构如表2所示。GA算法的适应度函数对整个算法的进化方向以及运行效率有重要的影响。本文的适应度函数选择平均平方误差MSE,即LSTM网络的损失函数选择MSE,如式(6)所示。神经网络优化器选择SGDM(含动量的随机梯度下降)优化器,可以有效避免局部收敛。激活函数选择ReLU(修正线性单元)函数,用来连接2个LSTM层和全连接层,其具有计算简单、更高效、速度快的优点,可以在一定程度上解决梯度消失的问题,如式(5)所示。
2.4 模型评价指标
对于回归计算问题,一般采用平均平方误差MSE、决定系数R2来评价模型的好坏。
平均平方误差MSE:
决定系数R2∈(-1,1),越接近1则说明模型精度越高:
3 仿真分析
3.1 有限元仿真
利用有限元软件建立轮对三维有限元仿真模型。模型参照某地铁曲辐板轮对的设计图,使用6面体8节点实体单元Solid185进行网格划分,总共有节点236 915个,实体单元214 584个,建立的有限元模型如图2所示。材料参数设置弹性模量E=2.1×1011Pa,泊松比为0.3,密度7.85 g/cm3。计算时在车轴两端施加固定约束,在踏面上施加横向力或垂向力。由于实际应变片测量的应变是曲辐板车轮的表面应变,仿真得到的结果需要经过式(8)的变换才能得到辐板表面沿车轮径向的应变εy′(本文统称辐板径向应变)。
式中:εx、εy、εz、γyz、γyz、γxy是直角坐标系下有限元法计算出的辐板表面某个节点的6个应变分量;l、m、n是局部坐标对全局坐标的方向余弦。
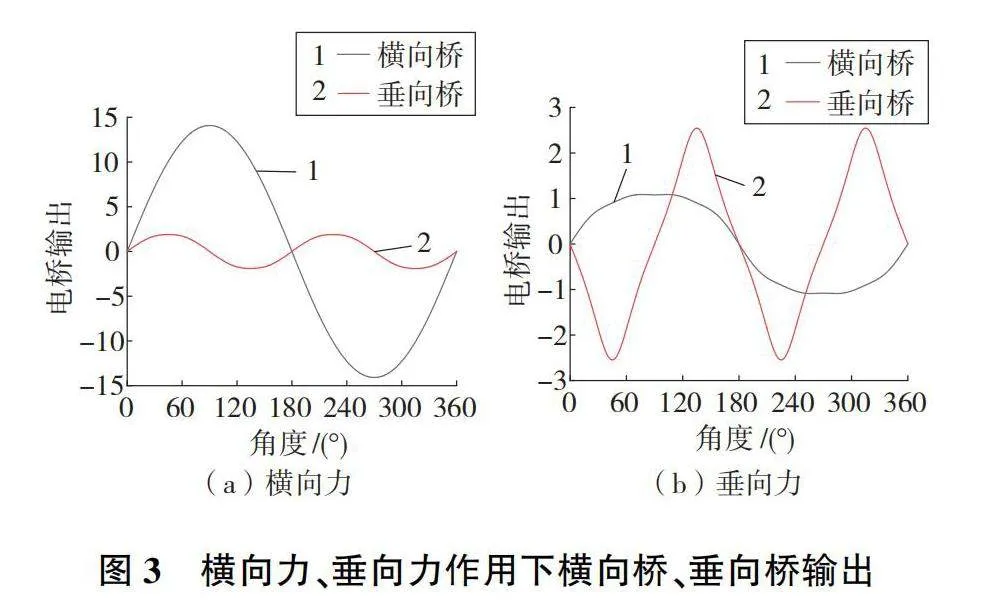
横向桥和垂向桥的取样半径分别为200 mm和250 mm,如图2所示。根据GB/T 5599—2019的连续测力轮对的组桥方法进行组桥,组桥后单个横向桥或垂向桥在横向力、垂向力分别作用下,一圈的输出如图3所示。
3.2 训练样本集的建立
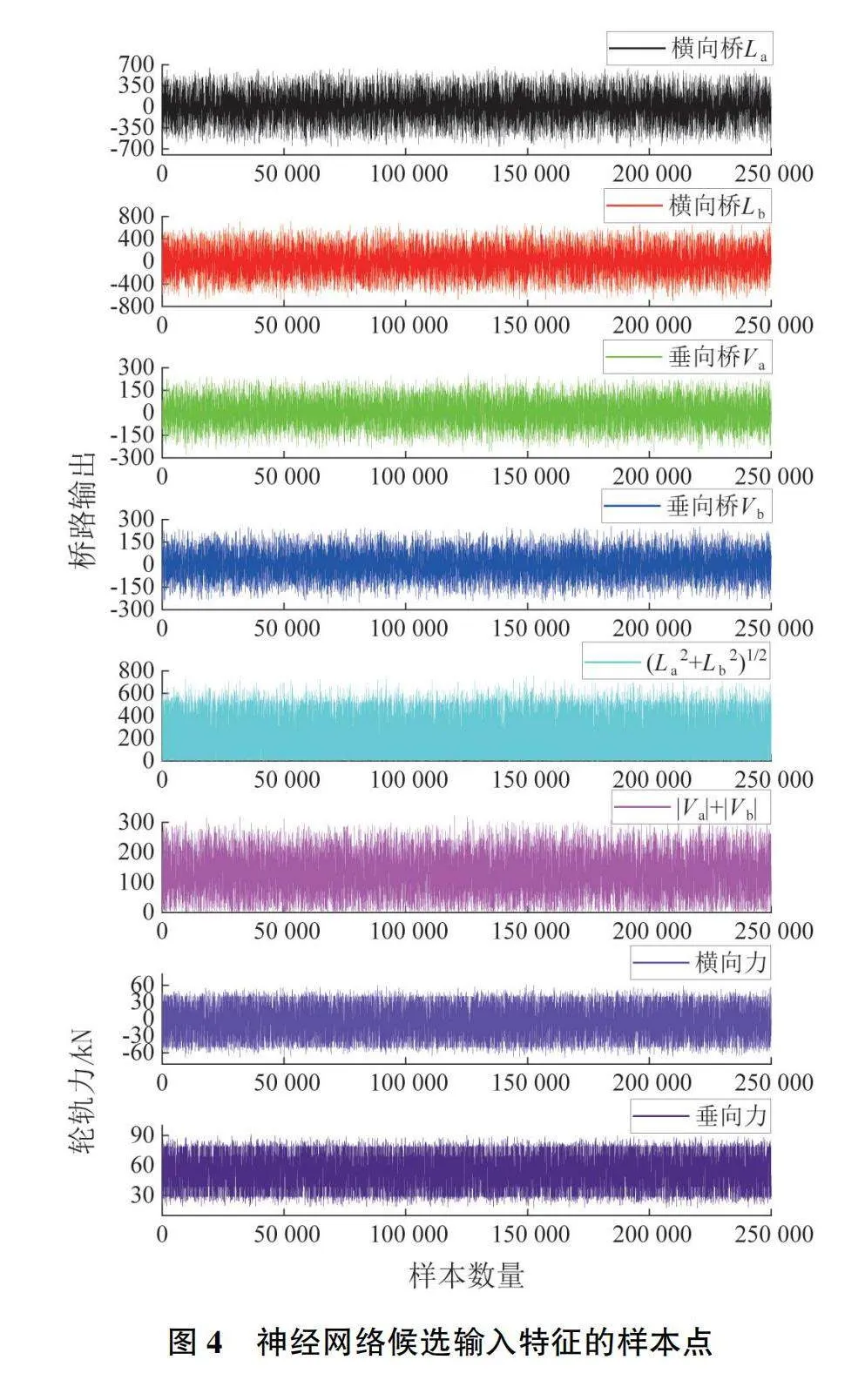
1)候选输入特征的样本集构建
为了选取合适的输入特征输入神经网络进行训练,构建候选输入特征样本集。通过对单位横向力、垂向力作用下横向桥、垂向桥的输出进行组合相加,得到不同大小横向力、垂向力同时作用下横向桥、垂向桥的输出,该候选输入特征的样本点如图4所示,包括相位相差90°的横向桥La和Lb、相位相差45°的垂向桥Va和Vb、两个横向桥输出的平方和的开根号以及两个垂向桥输出的绝对值之和,每个候选输入特征都拥有25万个样本点。
在横向力、垂向力同时作用在踏面上的工况下,构造训练样本集。首先构造横向力、垂向力的连续时序数列,力的取值范围分别为-65~65 kN和20~90 kN。样本点经随机取值后样条插值获得,以保证高频取样时两相邻点轮轨力的值不会差异过大,这是为了在构造时序数列时保证数据的连续性。同理,考虑轮对桥路的输出随车轮转动成周期性变化和车轮的转速变化,对轮对桥路360°的输出进行间隔为0.1°的样条插值,取样时每隔n°取对应位置桥路的输出,再和此时刻对应的横向力、垂向力相乘,构造出各电桥输出的连续时序数列。n根据式(9)计算后得到且保留一位小数。
式中:f为采样频率,为2 000 Hz;速度v由随机取值后样条插值获得,取值范围为0~100 km/h;r为车轮半径,为0.42 m。
2)最佳神经网络输入特征的确定与验证
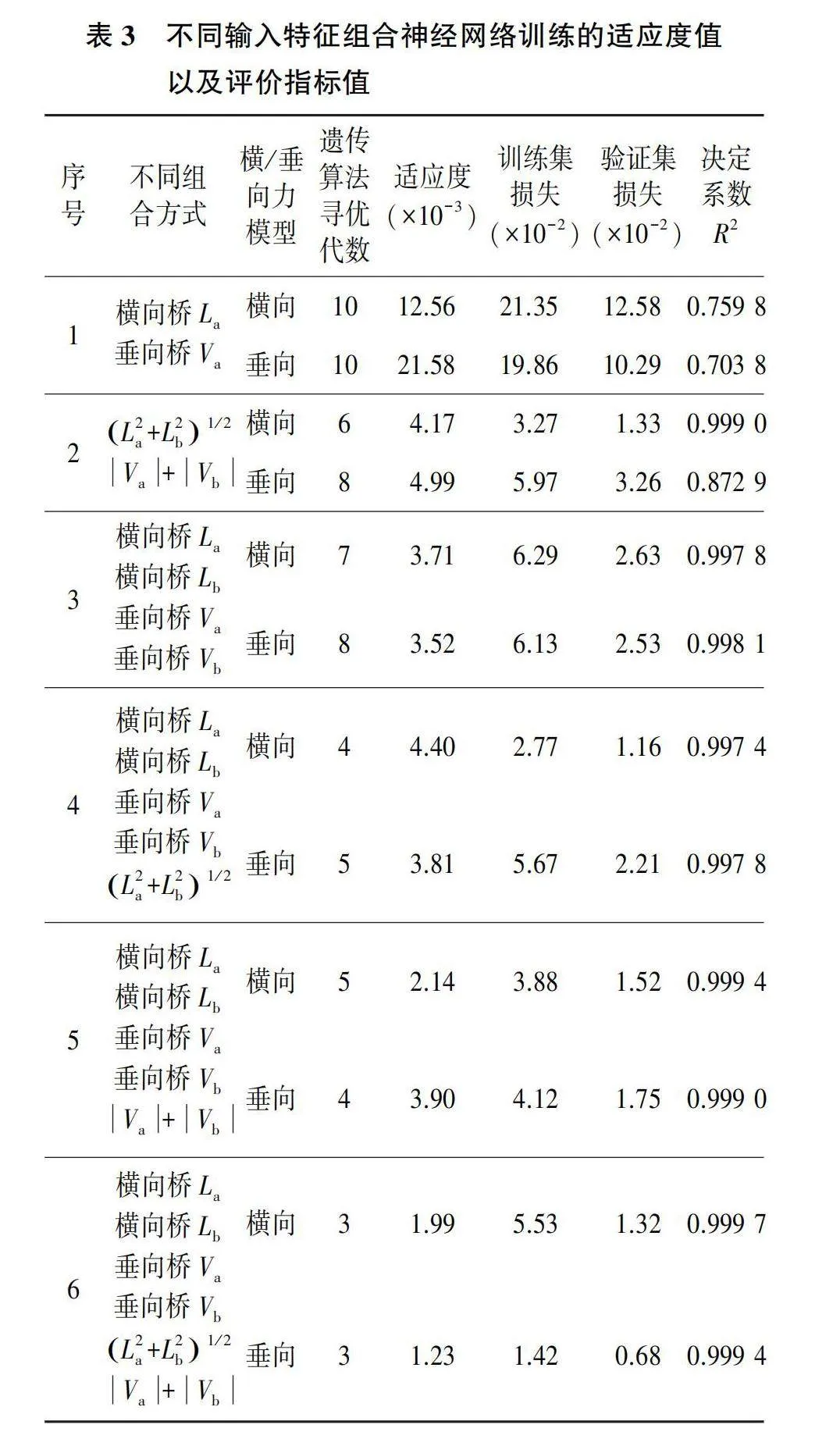
神经网络输入特征从图4所示的横向桥La、横向桥Lb、垂向桥Va、垂向桥Vb、(L2a+L2b)1/2和|Va|+|Vb|中选取,选择不同的输入特征组合方式进行验证训练,横向力模型、垂向力模型结果如表3所示。
从表3可以看出,单纯将横向桥、垂向桥的数据输入横向力、垂向力模型进行训练时,模型的寻优代数较多、训练速度慢。而加上处理后的信号再输入模型进行训练,可以有效提高模型的收敛速度,其中(L2a+L2b)1/2、|Va|+|Vb|对提高相应模型的寻优速度、减少寻优代数有较好的效果。当6个输入特征都输入模型进行训练时横向力、垂向力模型的寻优代数最少,精度较高且满足要求。因此,确定网络的输入特征为横向力、垂向力同时作用下的两个相位相差90°横向桥的输出、两个相位相差45°垂向桥的输出、两个横向桥输出平方和的开根号以及两个垂向桥输出的绝对值之和。用这6个特征参数对轮轨横向力或者垂向力进行计算,实现基于GA-LSTM的轮轨力连续测量。
3.3 模型训练分析
样本点共25万个,其中70%的数据作为训练集参与训练,30%的数据作为验证集进行验证。横向力和垂向力的计算模型训练流程相同,数据经过预处理后输入模型中进行训练,经过GA算法的寻优,每个个体的超参数数值以及对应的适应度如表4—表5所示。
选择的适应度函数为MSE,适应度的值越小越好。如表4—表5所示,横向力计算模型的最优适应度为1.99×10-3,垂向力计算模型的最优适应度为1.23×10-3,能够得到较高的计算精度和较好的计算结果。
使用GA算法优化得到的超参数进行训练,横向力、垂向力计算模型的训练集以及验证集的损失值如图5—图6所示。对于横向力计算模型,在迭代65次后,训练集和验证集的损失值在一个稳定值附近波动,判断模型的训练已经收敛,测试数据集最后一次迭代的损失值为0.01316,决定系数R2为0.9997,说明GA-LSTM网络模型的拟合精度比较好。对于垂向力计算模型,在经过176次迭代后,损失值基本在一个稳定值附近波动,判断模型的训练已经收敛,验证集最后一次迭代的损失值为0.00682,决定系数R2为0.9994,说明GA-LSTM网络模型的拟合精度比较好。
3.4 模型验证及分析
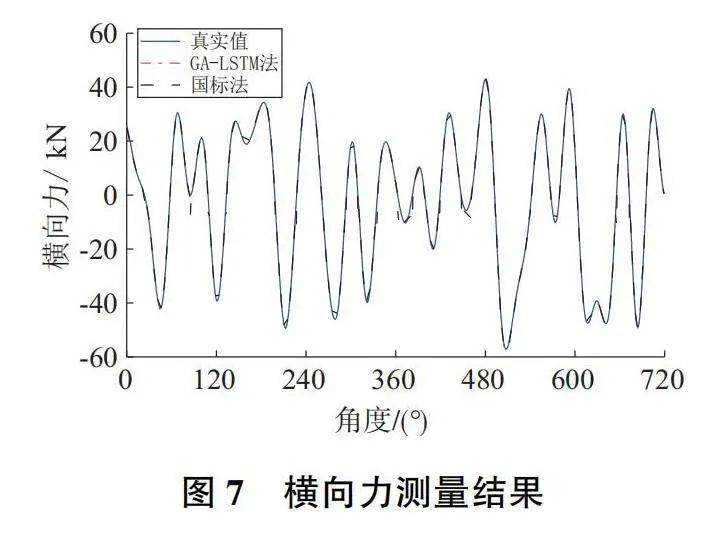
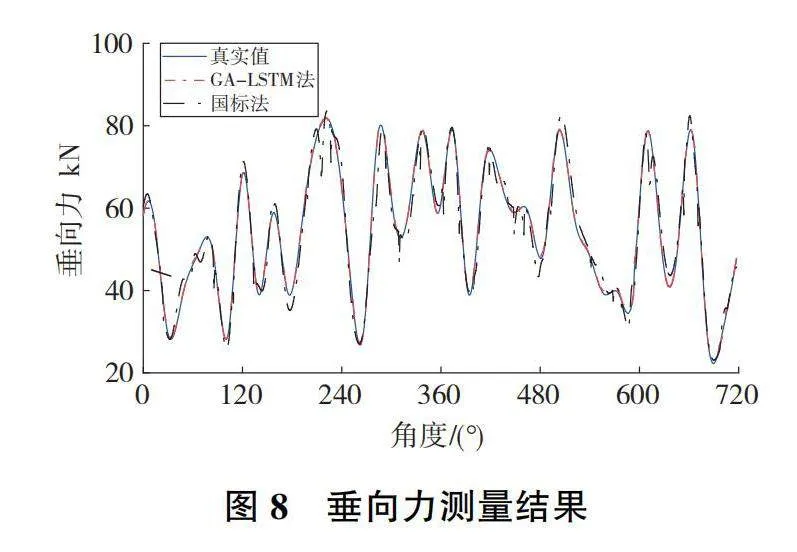
为了对以上模型进行验证,用同样的方法构造测试集,输入训练好的模型进行计算,并将模型计算结果、国标法计算结果和轮轨力真实值进行对比,真实值即构造训练集使用的轮轨力数据集。计算结果如图7—图8所示(本刊黑白印刷,相关疑问咨询作者)。
横向力、垂向力计算模型的相对误差以及百分比误差如图9—图10所示。对于横向力测量,国标法的最大测量误差为10.87 kN,平均测量误差为0.52 kN,最大百分比误差为326.13%,平均百分比误差为4.20%;GA-LSTM法的最大测量误差为2.07 kN,平均测量误差为0.28kN,最大百分比误差为27.03%,平均百分比误差为1.71%。对于垂向力测量,国标法的最大测量误差为12.99 kN,平均测量误差为2.24 kN,最大百分比误差为17.63%,平均百分比误差为4.23%;GA-LSTM法的最大测量误差为2.34 kN,平均测量误差为0.27 kN,最大百分比误差为5.24%,平均百分比误差为0.57%。
从上可以看出,无论是横向力计算还是垂向力计算,国标法的计算值都偏小,且GA-LSTM法的计算精度都要优于国标法。
4 线路试验分析
使用真实轮对标定数据构建样本集,训练模型,并使用线路实测数据进行验证计算。
4.1 测力轮对标定
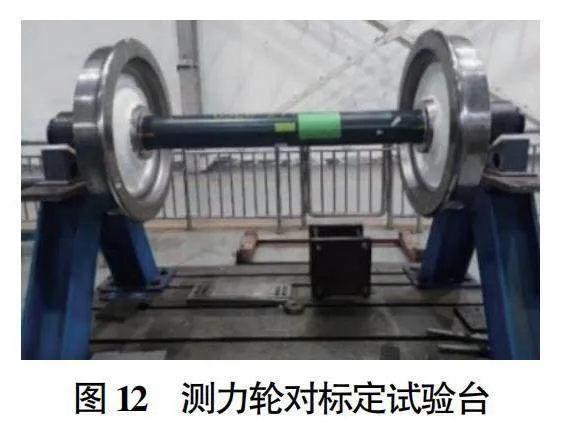
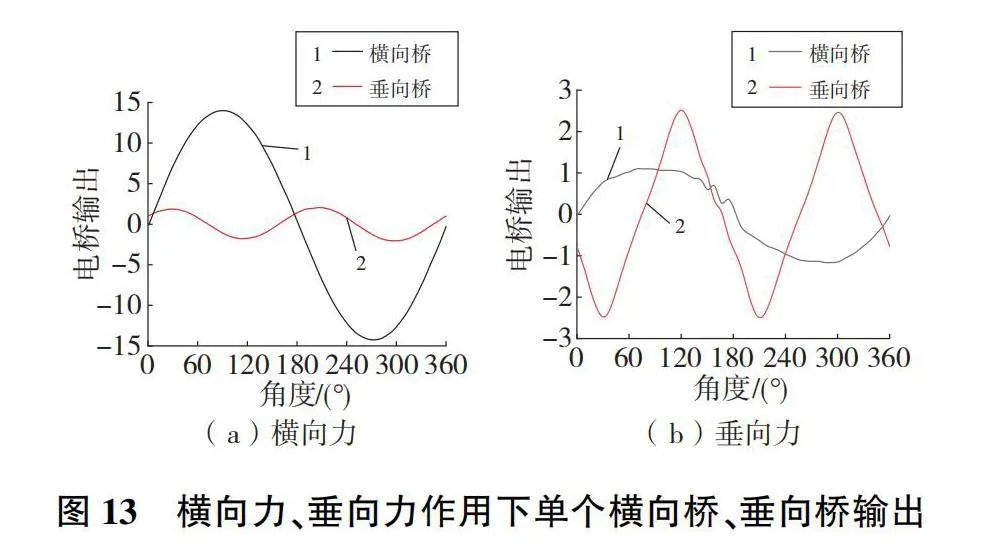
测力轮对贴片(应变片)和组桥在图11所示的试验台上进行,每个车轮辐板上要布置两个相位相差90°的横向桥以及两个相位相差45°的垂向桥。测力轮对横向力和垂向力的标定均在如图12所示的轮对标定实验台上进行,将待标定的测力轮对轮轴两侧固定在标定实验台上。标定后,单个横向桥、垂向桥的输出结果如图13所示。
4.2 测力轮对线路试验
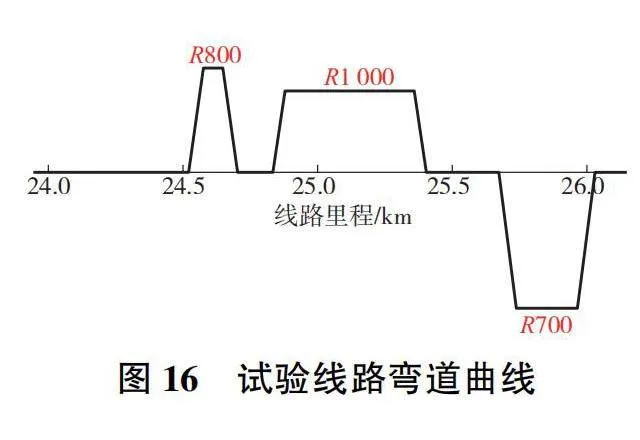
实测数据采集时长为155 s,采样频率为2 000 Hz,共31万个样本点,各桥路信号如图14所示。测力轮对安装在头车一位转向架一位轴位置,如图15所示。试验线路区间为国内某地铁线路的一段,线路直线弯道如图16所示,此测试区间约2 000 m,包含了直线、R700、R800和R1 000半径曲线。车辆运行速度如图17所示,最高试验速度为90 km/h。车辆载荷工况为空载悬挂系统正常工况,轮对静轴质量为93.42 kN。
4.3 训练样本构造
测力轮对标定结果(图13)相较于仿真数据,实际标定数据存在一定的误差,但都满足国标法和GA-LSTM法的计算要求。训练样本的构造思路和仿真部分类似,利用标定数据构造训练集,但横向力、垂向力使用线路实测数据的国标法计算结果,速度使用线路实测速度,其余参数不变。在输入神经网络模型进行计算前,训练样本要和仿真分析部分一样进行归一化处理。
4.4 模型训练分析
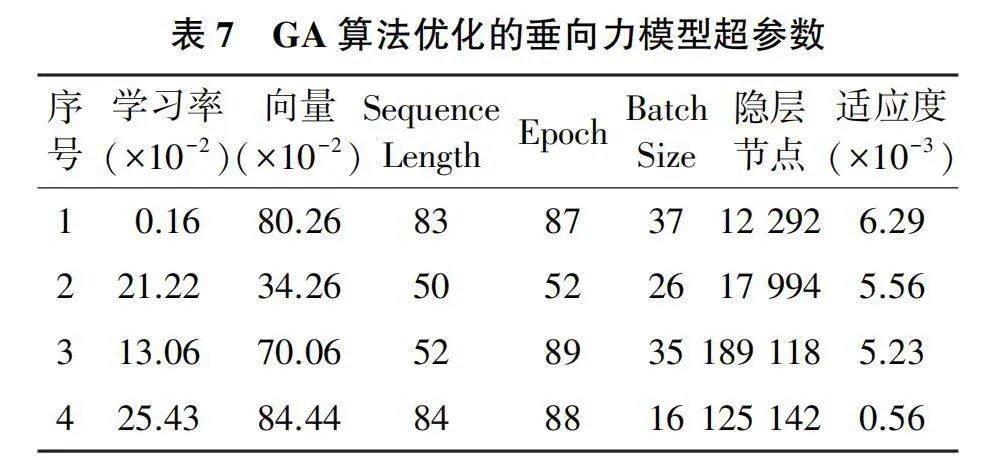
本部分使用的神经网络模型的输入特征和结构都和仿真分析部分相同,共31万个样本数据,其中70%的数据作为训练集参与训练,30%的数据作为验证集进行验证,经过预处理之后,用于GA-LSTM模型的训练,GA算法优化的超参数如表6—表7所示。
如表6—表7所示,横向力计算模型的最优适应度为1.09×10-3,垂向力计算模型的最优适应度为0.56×10-3,即能够得到较高的计算精度和较好的计算结果。
图18—图19分别是横向力模型和垂向力模型的损失值随神经网络迭代次数增加的变化曲线,横向力模型迭代117次后验证集损失值和决定系数R2分别达到0.010 25和0.997 2,垂向力模型迭代88次后验证集损失值和决定系数R2分别达到0.002 89和0.999 3,说明神经网络模型的拟合精度较好。
4.5 模型验证及分析
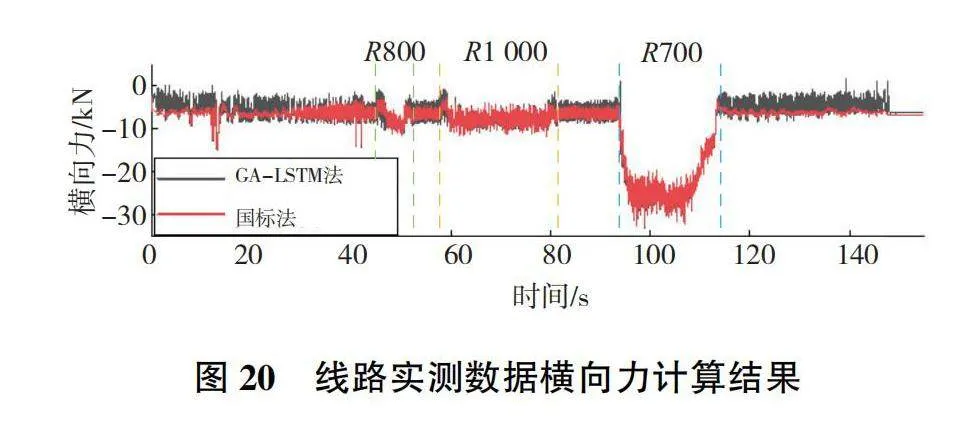
目前,高频轮轨力的计算方法还不够完善,国标法在计算轮轨力时会对桥路信号进行一个频率范围为0.5 Hz~10Hz的带通滤波。本文通过对桥路输出信号的观察研究,对测力轮对实测信号采用截止频率为30 Hz的低通滤波。对模型进行验证分析,将线路实测桥路输出经预处理后输入横向力、垂向力计算模型,得到基于GA-LSTM法的线路实测数据的轮轨力计算值,并和国标法进行对比,如图20—图21所示。
从仿真分析可以得知,国标法的计算结果,无论是横向力还是垂向力,其精度都要低于GA-LSTM法,且国标法的计算结果偏小于实际值。对于线路实测数据的计算结果,在图20—图21中,两种计算方法计算的横向力和垂向力的趋势基本相同,也符合国标法计算结果偏小的现象。
5 结语
本文参照国标连续测力轮对法中辐板应变的组桥方法,获取用于长短时记忆神经网络的训练数据,用遗传算法对相关超参数进行了优化,探究了轮轨力和辐板应变之间的关系,并实现了通过辐板应变数据直接、连续地测量轮轨力。
本文通过仿真分析以及实测数据可以得到以下结论。
1)根据仿真数据,在时域范围内构建样本集并进行数据的预处理,最终实现基于GA-LSTM法的轮轨力连续测量。结果表明,无论是横向力还是垂向力,国标法的计算值都偏小,且误差相对较大,而GA-LSTM法的计算精度都要优于国标法。
2)使用线路实测数据对基于GA-LSTM的轮轨力连续测量方法进行了验证并和国标法进行了对比分析。试验证明,GA-LSTM法能较好地对轮轨力进行计算,可为神经网络应用于轮轨力测量提供参考。
本文的辐板应变处理方法参考国标连续测力轮对法,也继承了其只能对低频轮轨力进行识别的特点。当铁道车轮在轨道不平顺、车轮多边形和钢轨波磨等恶劣条件下运行时[10-11],会导致高频轮轨力的产生,而本文所提的方法无法实现高频轮轨力的测量,并且由于国标法需要在辐板上选择合适半径进行贴片才能保证精度,本文因限于篇幅,没有结合辐板任意半径的情况进行对比分析。目前,研究团队正扩展测力轮对测量的轮轨力频率范围的研究,今后也会将该方法扩展到高频轮轨力的连续测量和辐板任意半径中去。
参考文献:
[1] 金学松,郭俊,肖新标,等. 高速列车安全运行研究的关键科学问题[J]. 工程力学,2009,26(增刊2):8-22,105.
[2] GULLERS P,ANDERSSON L,LUNDÉN R. High-frequency vertical wheel-rail contact forces: field measurements and influence of track irregularities[J]. Wear,2008,265(9/10):1472-1478.
[3] GB/T 5599—2019 机车车辆动力学性能评定及试验鉴定规范[S].
[4] 陈建政. 轮轨作用力和接触点位置在线测量理论研究[D]. 成都:西南交通大学,2008.
[5] CAZZULANI G,DI GIALLEONARDO E,BIONDA S,et al. A new approach for the evaluation and the improvement of the metrological characteristics of an instrumented wheelset for the measure of wheel-rail contact forces[J]. Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit,2017,231(4):381-393.
[6] TENG F, ZHU R, ZHOU Y B, et al.A lightweight model of wheel-rail force inversion for railway vehicles[J]. Concurrency and Computation: Practice and Experience, 2021(1): e6443.
[7] URDA P, ACEITUNO J F, MUNOZ S, et al. Artificial neural networks applied to the measurement of lateral wheel-rail contact force: a comparison with a harmonic cancellation method[J]. Mechanism and Machine Theory, 2020, 153: 103968.
[8] 金学松, 张雪珊, 张剑, 等. 轮轨关系研究中的力学问题[J]. 机械强度, 2005, 27(4): 408-418.
[9] 车畅畅, 王华伟, 倪晓梅, 等. 基于1D-CNN和Bi-LSTM的航空发动机剩余寿命预测[J]. 机械工程学报, 2021, 57(14): 304-312.
[10] 吴越, 韩健, 左齐宇, 等. 钢轨波磨对高速列车车轮多边形磨耗产生与发展的影响[J]. 机械工程学报, 2020, 56(17): 198-208.
[11] 吴越, 韩健, 刘佳, 等. 高速列车车轮多边形磨耗对轮轨力和转向架振动行为的影响[J]. 机械工程学报, 2018, 54 (4): 37-46.
收稿日期:2023-02-10
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:08
电子制作(2019年19期)2019-11-23 08:42:00
电子制作(2019年12期)2019-07-16 08:45:28
中国生物医学工程学报(2019年5期)2019-07-16 07:56:56
北京航空航天大学学报(2017年12期)2017-04-23 08:31:45
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
海军航空大学学报(2015年4期)2015-02-27 13:45:47
电测与仪表(2014年20期)2014-04-04 11:58:02
电测与仪表(2014年2期)2014-04-04 09:04:04
