3D打印制备复杂截面惯性流道及微粒惯性聚焦特性研究
2024-08-23 00:00:00顾乔张鑫杰刘尧包洋朱行杰陈亚伟
分析化学 2024年1期



关键词微流控;3D打印;复杂截面;惯性聚焦;二次流调控
生物微粒(如细胞和细菌等)操控在分析化学和生物医学等领域有重要的研究价值,在单细胞质谱分析和肿瘤检测等方面具有重要的应用前景[1-2]。作为一种高效的微粒操控手段,基于微流控芯片的微粒操控技术已经成为研究的热点,包括基于电、磁、声和光等物理场的主动式操控技术(如介电泳[3]、磁泳[4]、声镊[5]和光镊[6]等)、基于微流道特殊结构的被动式操控技术(如确定性侧向位移[7]、微阻隔过滤[8]和惯性操控[9]等)以及主动与被动糅合的操控技术[10]。主动式技术对微粒具有较好的可控性和控制精度,但样品处理通量较低且操作过程较复杂。被动式技术的操控通量和精度较高且无需外场,因此具有更好的集成优势。其中,惯性操控技术利用流体惯性效应使微粒受惯性力迁移实现精确操控,具有高通量和操作便捷等优势,在处理大体积样品中的生物微粒时具有明显优势[11]。
惯性微流控技术最早由DiCarlo等[12]于2007年提出,经过十多年的发展已开发出多种流道结构的惯性微流控芯片。在各类惯性流道中,矩形截面流道结构简单、制作方便,研究最为广泛。微粒在矩形截面直流道中受到流道壁面和流体剪切梯度共同诱导的惯性升力作用,聚焦在流道长边附近的中心线上[13]。将直流道改为弯流道,流道会产生二次流,粒子受惯性升力的同时还受二次流曳力影响,据此可以调整粒子的聚焦平衡位置[14]。除矩形截面流道外,一些学者研究了异形截面流道中粒子的惯性聚焦效应,如梯形[15]、半椭圆形[16]、半圆形[17]和三角形[18]等。其中,梯形截面弯流道可产生偏置二次流,使粒子受增强的二次流曳力作用实现精确分离[19]。目前,矩形和梯形流道已广泛应用于各类生物细胞操控,例如从血液中分离癌细胞[20]、白细胞[21]和血浆[22]等。除上述流道外,Rafeie等[23]报道了组合形截面的惯性流道,通过将两种及以上不同截面结构的惯性流道组合为更复杂的流道,可综合利用各独立截面流道对微粒的惯性聚焦效果,使微粒聚焦位置更加多样化。然而,组合形流道结构非常复杂,目前报道的方法仅能通过超精密微铣加工的方式制作该类流道,而微铣加工对机床精度和稳定性要求极高,加工成本高昂;此外,由于组合形流道鲜有报道,因此微粒在该类流道中的惯性聚焦机理仍需深入研究。
本研究采用面投影光固化三维(3D)打印的加工方法,通过结合常规的聚二甲基硅氧烷(PDMS)倒模复刻技术,可制备高精度的组合形截面微流道。基于上述加工方法,研制了三阶梯和五阶梯截面螺旋流道惯性微流控芯片,并研究了不同尺寸粒子在阶梯形流道中的运动过程及聚焦行为,解析了粒子的惯性聚焦迁移机理。
1实验部分
1.1仪器与试剂
XFP01-BD注射泵(苏州讯飞科学仪器有限公司);XDS-3倒置荧光显微镜(上海光学仪器一厂);StingrayF-033B/C高速CCD相机(德国AlliedVisionTechnologies公司);PDC-MG等离子清洗机(成都铭恒科技发展有限公司);nanoArch®S140微纳3D打印系统(深圳摩方新材料科技有限公司);ADSM301电子显微镜(深圳安东星科技有限公司)。
PDMS(美国道康宁公司);聚苯乙烯荧光微球(直径6μm和10μm,天津市倍思乐色谱技术开发中心),用于模拟生物细胞(如红细胞和白细胞);Tween20、无水乙醇和异丙醇(美国Sigma-Aldrich公司);HTL耐高温树脂(深圳摩方新材料科技有限公司)。实验用水为去离子水。
1.2实验方法
1.2.1阶梯形截面流道结构设计
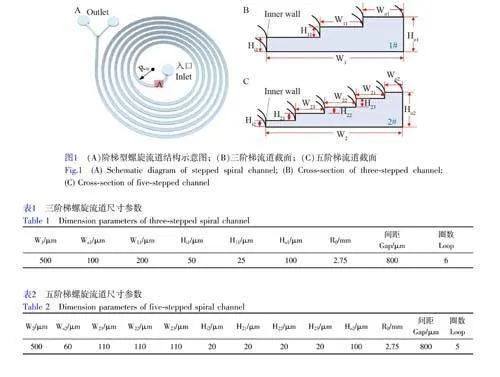
两种阶梯形截面惯性流道的主体结构均为螺旋线形(图1A),具有1个入口和2个出口。两种流道的主要区别在于截面尺寸不同,如图1B和1C所示,流道截面均为阶梯形,但阶梯数量不同,分别为3个和5个阶梯。两种流道的内壁高度均小于外壁高度,流道详细尺寸参数分别见表1和表2。设计流道尺寸参数时,主要依据微粒惯性聚焦要求、惯性升力和迪恩曳力相关计算公式,对螺旋流道的起始内圈半径、流道总宽度、流道内圈和外圈高度、阶梯宽度和高度、流道圈数以及流道间隔等参数进行设计。此外,流道结构的复杂程度和流道加工的可行性也需要综合考虑。
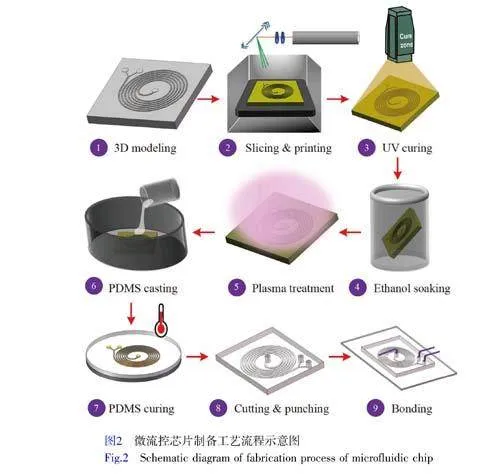
1.2.2微流控芯片制备工艺
微流控芯片制备工艺流程如图2所示,主要包括流道结构设计、流道阳模制作、模具表面处理和PDMS倒模键合4个关键步骤。首先,在SoildWorks软件中创建流道3D结构模型,将其输出为STL格式文件。接着,将STL文件导入3D打印机,对模型进行添加支撑和切片操作,利用紫外光使液态HTL树脂固化。为实现流道的高精度和快速打印成型,对模型正常层设置10μm切片厚度和1s曝光时间,对底层设置50μm切片厚度和2s曝光时间。对固化成形的流道阳模进行表面处理,采用异丙醇充分清洗阳模。为确保消除模具表面未固化的材料,将模具放入无水乙醇中浸泡2h。为提升模具的脱模性能,将模具放入氧等离子清洗机中辉光照射2min。最后,采用PDMS倒模复刻技术制备微流控芯片,主要包括PDMS浇铸、脱气、固化、脱模、切割、打孔和键合等步骤,键合后得到完备的PDMS芯片。
1.2.3微粒惯性操控实验平台搭建
为研究阶梯形流道中粒子惯性聚焦行为,搭建了粒子惯性操控与运动观测实验平台。首先,将微流控芯片入口用特氟龙管与装有聚苯乙烯微球悬浮液的30mL注射器相连接,并将注射器装载于精密注射泵上,芯片出口与离心管连接。将微流控芯片固定于倒置的荧光显微镜工作台上,利用高速CCD、荧光发射模块和10×物镜拍摄流道出口附近直流道处粒子的运动轨迹。相机控制软件VimbaViewer设置曝光时间为500ms或更高,拍摄100张图像。最后,将图像序列在ImageJ软件中进行叠加处理和分析。为定量表征粒子的聚焦效果,利用ImageJ软件获取沿流道宽度方向上的荧光强度数值,并绘制粒子的归一化荧光强度曲线。
1.2.4阶梯形流道二次流数值建模
为便于解析阶梯形流道中粒子惯性聚焦机理,采用多物理场仿真软件COMSOLMultiphysics®对阶梯形截面螺旋流道进行3D数值建模,研究3D流道中的二次流场分布。由于螺旋流道的长度较长,为简化模型,仅建立了半圈的弯曲流道模型,三阶梯和五阶梯流道模型的半径均为6.5mm。流道模型采用层流模块,流体离散化设置为P2+P2(二阶速度+二阶压力),流道壁面定义为无滑移边界。流道中的液体为纳维-斯托克斯不可压缩流体,流体材料设置为水,密度为1000kg/m3,动力粘度为0.001Pa·s。流道的入口流速设置为0.43m/s,出口压力设置为0。采用精细化的四面体网格划分模型,通过计算模型得到阶梯形流道截面中的二次流场及流速分布。
2结果与讨论
2.13D打印微流控芯片质量
3D打印流道阳模实物如图3A~3C所示,可见流道表面几乎呈镜面,无毛刺和树脂残留物黏连。用刀片将PDMS芯片沿流道正截面切开,并置于显微镜下观测,阶梯形截面如图3D和3E所示。对比两种流道截面轮廓,发现三阶梯流道截面的轮廓线平行度和垂直度较好,水平和垂直方向的尺寸误差分别为±10μm和±6μm。五阶梯流道截面的垂直度稍差,水平和垂直方向的尺寸误差分别为±20μm和±10μm。微流控芯片实物如图3F所示,芯片流道中填充了蓝墨水,可以直观表现微流道的平面结构。总体而言,3D打印加工复杂阶梯形微流道的质量较好,可满足后续粒子惯性操控实验要求。
2.2微粒惯性聚焦原理
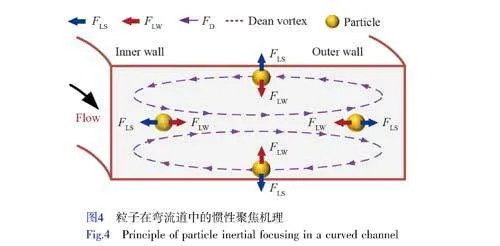
微尺度直流道中粒子雷诺数Re≥1时,靠近流道壁的粒子会受到远离壁面方向的壁面升力FLW作用,同时粒子还受到指向壁面方向的剪切梯度升力FLS的作用(图4)。当粒子直径满足惯性聚焦要求(a/Dh≥0.07,a为粒子直径,Dh为流道水力直径)[12]时,粒子所受的净惯性升力FL大于粒子所受到的流体粘性力,粒子惯性聚焦至流道内的某一平衡位置。粒子所受的净惯性升力FL按公式(1)和(2)计算[24]:
式中,ρ为流体密度,Um为流体最大速度,fL为升力系数(取决于流道雷诺数Re和粒子在流道横截面内的位置Xp),μ为流体动力粘度。
粒子处于弯流道内时,弯流道中心区域与近壁面区域流体流速不匹配,产生二次流,使流体在流道截面上产生两个对称旋转的漩涡,该现象即为Dean流效应。Dean流的大小可以采用无量纲参数De来表示(式(3))[24]:
式中,R为流道的起始半径。若流体遵循斯托克斯定律,则粒子在弯流道中所受的Dean曳力FD的计算公式(式(4))近似为[24]:
式中,UD为Dean流速。当Dean曳力远大于惯性升力时,粒子忽略惯性升力影响随Dean流运动。当Dean曳力远小于惯性升力时,粒子几乎不受Dean流影响,将惯性聚焦至流道内的平衡位置。当Dean曳力与惯性升力处于同一量级时,粒子在流道内的聚焦位置可通过调节Dean流的强度进行精确控制。
2.3微粒惯性操控实验结果
2.3.1三阶梯流道中粒子惯性聚焦效应
配制微粒悬浮液,将10μm和6μm粒子原液分别加入到去离子水中,再各加入质量浓度为0.5%的Tween20,以降低粒子团聚及黏附于流道壁面的现象。配制得到的10μm粒子悬浮液的浓度约为105particle/mL,6μm粒子悬浮液的浓度约为106particle/mL。
图5显示了三阶梯流道出口处粒子的聚焦迁移荧光轨迹,粒子进样流量均为0.1~1.8mL/min,流量增量为0.1mL/min,流量对应的迪恩数De为0.8~14.4。对10μm粒子的荧光轨迹进行分析,发现粒子在低流量(De=0.8)时主要分布于流道外侧(阶梯Ⅰ和Ⅱ的交界处)。随着流量逐步增大,粒子逐渐聚焦并向流道内壁面方向移动。当De=4时,大部分粒子已聚焦在流道中心附近。随着流量的继续加大(De=6.4~14.4),粒子聚焦效果变得更好,并且大部分粒子已在内壁面附近形成聚焦粒子束。值得注意的是,有部分粒子在阶梯Ⅱ的内壁面处形成了单列聚焦,另有少量粒子在阶梯Ⅰ的内壁面处形成单列聚焦,最终呈现出三平衡位置聚焦现象。10μm粒子的规格化荧光强度曲线如图6A所示,当De值较低时(De=1.6),粒子束具有一个靠近流道外壁面的聚焦峰。当De值分别增大至3.2、6.4和11.2时,粒子束均具有2个明显的聚焦峰,并且聚焦峰位置逐步向流道内壁移动。从插图中的明场粒子轨迹可知,De值分别为1.6和11.2时粒子的聚焦状况很好地佐证了上述结论。此外,阶梯Ⅰ内粒子聚焦束在荧光强度曲线中无聚焦峰存在,原因在于该位置处粒子数量极少,导致荧光强度较弱。
与10μm粒子相比,6μm粒子的惯性聚焦行为有所不同。在低流量(De≤1.6)时,大部分6μm粒子分散于外侧流道中。当流量逐渐增大时,粒子分别在3个阶梯的内壁面附近形成3个稳定的聚焦位置(De=4.8~8.8)。其中,阶梯Ⅱ处的粒子聚焦束荧光强度最高,表明大多数粒子聚焦于该位置。阶梯Ⅲ处的粒子束荧光强度略高于阶梯Ⅰ处,表明聚焦在流道内壁附近的粒子数略多于流道外壁面。随着流量进一步增大(De=9.6~14.4),之前聚焦于流道内壁附近的粒子逐渐消失,而聚焦于流道外壁附近的粒子则逐渐增加,表现为外壁面附近的粒子束荧光强度增加。图6B中6μm粒子归一化荧光强度曲线也很好地验证了上述观点,随着De值从低到高增大时,聚焦粒子束的荧光峰从2个变为3个,最后再变为2个。
由仿真结果可知,内壁面阶梯Ⅲ中的二次流最弱,外壁面阶梯Ⅰ中的二次流最强,因此低流量时10和6μm粒子均受主导的强迪恩曳力作用,随二次流在外侧流道附近来回旋转运动,呈分散状分布。随着流量的增大,粒子所受的惯性升力逐渐与迪恩曳力平衡,表现为粒子逐渐聚焦并向流道内壁面方向移动。由于三阶梯流道中存在3对相对独立的二次流旋涡,每个阶梯中的二次流旋涡均对粒子造成了一定的束缚作用,因此导致粒子具有3个惯性聚焦平衡位置。由于10μm粒子尺寸较大,所受的惯性升力也较大,因此绝大部分10μm粒子聚焦在流道内壁面附近。6μm粒子所受的惯性升力较小,因此内壁面处的粒子受强迪恩曳力作用被拖拽至阶梯Ⅱ和Ⅲ中,最终形成了2个聚焦平衡位置。
2.3.2五阶梯流道中粒子惯性聚焦效应
图7A显示了10μm粒子在五阶梯流道中的荧光运动轨迹,粒子进样流量设为0.1~1.2mL/min,流量增量为0.1mL/min,流量对应的De=0.7~8.0。基于粒子在流道中的聚焦行为,可将粒子聚焦过程大体分为单平衡位置聚焦和双平衡位置聚焦两个阶段。当De值在0.7~2.0范围内时,粒子在阶梯Ⅱ中处于单平衡位置聚焦阶段,并且随流量增大,聚焦粒子束缓慢向内侧流道迁移。当流量进一步增大时(De=2.7~5.4),大部分粒子快速进入阶梯Ⅳ中,而小部分粒子的迁移速度较慢,从而产生明显的双平衡聚焦状态。当流量较高时(Degt;6),聚焦粒子束逐渐分散。6μm粒子的运动轨迹如图7B所示,6μm粒子在所有流量范围内均呈现出了双平衡位置聚焦状态,并且粒子聚焦位置靠近流道外侧。随着流量增大,部分粒子的聚焦位置缓慢向流量内壁移动。图7C和7D分别显示了10μm和6μm粒子的归一化荧光强度曲线。随着De值不断增大,10μm粒子束的聚焦峰从1个变为2个,并且2个聚焦峰的位置逐步向流道内壁移动。6μm粒子束具有2个聚焦峰,但聚焦峰位置随De值变化较小。
由仿真图可知,阶梯Ⅰ和阶梯Ⅱ中共存一对非对称的二次流旋涡,其它3个阶梯中存在3对相对独立的二次流旋涡。由于外侧流道的二次流强度远大于内侧流道,因此绝大多数粒子在低流量时被束缚于外侧流道中。考虑到惯性升力与流道水力直径的平方成反比,粒子在五阶梯流道中受到的惯性升力远大于三阶梯流道,因此10μm粒子在低流量时的惯性升力即可与迪恩曳力达到平衡,从而实现单束聚焦。随着流量增大,10μm粒子所受的惯性升力逐渐大于迪恩曳力,使得大部分粒子向阶梯Ⅲ迁移,小部分粒子则受外侧强二次流束缚仍然保持在阶梯Ⅱ中的平衡位置。在高流量时,由于整个流道中的二次流显著增强,导致10μm聚焦粒子束受二次流扰动产生一定的分散性。与10μm粒子相比,6μm粒子由于尺寸小,所受惯性升力较小,因此在低流量时受迪恩曳力作用随二次流在外侧流道中作散乱运动。在高流量时,一部分6μm粒子受增强的惯性升力进入阶梯Ⅲ中,另一部分粒子则被阶梯Ⅱ中的强二次流所束缚,从而产生2个稳定的聚焦位置。
综上所述,三阶梯和五阶梯流道中二次流漩涡的数量、形态和强度显著不同。通过改变流道截面形状,可显著改变二次流特性,最终改变流道中粒子的惯性聚焦平衡位置和聚焦粒子束数量。
3结论
提出了面投影微立体光刻3D打印制作复杂阶梯形截面惯性流道的加工方法,研制了高精度的三阶梯和五阶梯截面螺旋流道惯性微流控芯片。针对上述两种阶梯形流道,开展了粒子惯性操控实验研究,并结合仿真结果解析了10μm和6μm粒子在流道中的惯性聚焦迁移机理。在三阶梯流道中,10μm粒子主要聚焦在流道内壁面附近,少量粒子单束聚焦在流道中心和流道外壁面处,6μm粒子则聚焦在流道中心和外壁面处的2个平衡位置。在五阶梯流道中,10μm和6μm粒子均出现双平衡位置聚焦现象。其中,10μm粒子的2个聚焦平衡位置随着流量增大逐步向内壁面迁移;而6μm粒子的平衡位置变化不大。综上,阶梯形截面流道中存在多对二次流漩涡,通过调整阶梯形状,显著改变了二次流的数量、形态和强度,使粒子在流道中具有多个聚焦平衡位置。本研究成果有助于进一步拓展惯性微流控理论,为生物细胞精准惯性操控提供新的思路,促进惯性微流控技术在分析化学和生物医学等领域中的发展。
猜你喜欢
中学生理科应试(2024年3期)2024-06-26 07:54:45
赤峰学院学报·自然科学版(2021年10期)2021-11-11 03:34:02
珠江水运(2019年13期)2019-08-04 09:38:46
东华大学学报(自然科学版)(2018年1期)2018-06-29 03:35:10
节水灌溉(2017年11期)2017-03-21 00:36:48
中学物理·高中(2016年11期)2016-12-15 01:30:36
中国塑料(2016年1期)2016-05-17 06:13:13
分析测试学报(2015年4期)2016-01-13 06:18:34
分析测试学报(2015年3期)2016-01-13 06:18:11
分析测试学报(2015年3期)2016-01-13 06:18:10