基于FPGA的频率捷变雷达目标回波生成系统的设计与分析
2024-08-22 00:00:00陈旭凯崔炳喆何广亮郭展
航空兵器 2024年3期





摘" 要:""""" 为提高频率捷变雷达信号处理算法迭代的验证效率, 提出一种基于FPGA的频率捷变雷达目标回波生成的设计方法。 该方法采用逐项还原回波信号相位的思想, 通过建立频率步进波形回波信号数学模型, 基于FPGA求解目标相对匀速径向运动时目标回波实时相位, 解决了频率捷变信号目标回波的实时生成问题。 仿真结果表明, 在目标匀速和非匀速两种运动状态下, 通过对比有/无速度补偿时目标回波相位变化曲线、 目标高分辨率一维距离像以及相邻三帧回波信号的细分辨维距离单元编号, 目标匀速运动时经速度补偿的回波相位在-π和π之间呈现线性变化, 并且细分辨维距离单元编号在目标匀速和非匀速运动状态下依次相差10和10、 9, 验证了该回波生成系统的有效性和准确性。
关键词:"""" 目标回波; 频率捷变信号; FPGA; 高分辨率一维距离像; 目标相对匀速运动
中图分类号:""""" TJ765.4
文献标识码:""" A
文章编号:"""" 1673-5048(2024)03-0072-06
DOI: 10.12132/ISSN.1673-5048.2023.0155
引用格式: 陈旭凯, 崔炳喆, 何广亮, 等 . 基于FPGA的频率捷变雷达目标回波生成系统的设计与分析[ J]. 航空兵器, 2024, 31( 3): 72-77.
Chen Xukai, Cui Bingzhe, He Guangliang, et al. Design and Analysis of Objective Echo Signal Generation System" for Frequency-Agile Radar Based on FPGA[ J]. Aero Weaponry, 2024, 31( 3): 72-77.( in Chinese)
0" 引" 言
如今, 随着雷达系统总体设计要求不断提高, 性能指标更加精确, 设计研发周期相较以往进一步缩短, 雷达信号处理需要在更短的研发时间内完成一套标准流程下的开发和测试[1]。 雷达目标回波生成系统不仅可以高效地配合信号处理算法完成算法版本的迭代, 基于FPGA平台方便使用[2], 而且可以大大节省成本, 在目前测试环境下具有较高的可信度, 在未来雷达信号处理以及软硬件系统协同开发领域具有广泛的应用前景[3]。
近年来, 学者们在雷达目标回波模拟领域取得了诸多成果。 文献[4]提出将System Generator[5]嵌入到FPGA平台以实现目标回波模拟解算的设计方法。 文献[6]讨论了常规雷达的目标模拟系统设计方法和局限性, 分析了设计目标模拟系统的关键方法。 文献[7]基于DSP和FPGA, 采用等距离算法兼顾同一距离单元的采样点相位信息, 设计了SAR目标回波模拟系统, 显著提高了系统带宽与运行速度。 文献[8]提出一种基于FPGA的雷达目标回波模拟系统的方案, 利用时序控制内核和DDS内核, 生成了频率和相位可自主定义的脉冲调制回波信号。 上述研究都将提取目标回波信号中的相位信息作为重点, 通过模块引入和算法设计, 降低目标回波跨距离单元走动的影响。 但这些方法都没有研究频率捷变信号, 频率捷变波形的回波信号在目标模拟系统中需要适配新的算法, 还原目标相对运动带来的相位变化。 文献[9]对比了雷达目标回波模拟系统与雷达欺骗干扰机的组成和功能, 为雷达目标回波信号模拟系统的设计提供了可借鉴的内容。 文献[10]通过阐述三种雷达制导导弹的目标模拟方法和目标模拟系统原理, 提出了通用化设计难点和解决方法。 文献[11]介绍了模拟系统的原理与实现方式, 设计出一种方便雷达整机功能调试的回波模拟系统。 上述研究总结回波模拟系统的原理, 但适应性较差, 针对频率捷变雷达信号, 无法确保满意的效果[12]。
针对上述问题, 本文首先建立了频率捷变回波信号的数学模型, 对匀速运动目标回波信号的所有相位项逐一分析并逐一还原, 设计基于FPGA的频率捷变回波信
收稿日期: 2023-08-14
基金项目: 航空科学基金项目(20200001012010; 2020Z037012004)
作者简介: 陈旭凯(1994-), 男, 河南洛阳人, 硕士研究生。
*通信作者: 崔炳喆(1973-), 男, 河南南阳人, 研究员。
号生成系统。 将FPGA产生的回波信号余弦分量导入到仿真软件中, 绘制出有/无速度补偿的回波相位变化曲线
和目标高分辨率一维距离像, 通过对比目标相对匀速和非匀速两种运动状态下的一维距离像和三帧回波信号细分辨维距离单元编号, 验证了该目标回波生成系统的有效性和准确性。
1" 频率步进波形回波信号数学模型建立
1.1" 建立数学模型
本文所研究的频率捷变信号, 脉冲序列的载频按照固定频率步进阶梯Δf线性增加(如图1所示), 发射脉冲串可表示为[13]
s(t)=1N∑N-1i=0u(t-iTr)exp(-j2π(fc+iΔf)t)(1)
航空兵器" 2024年第31卷第3期
陈旭凯, 等: 基于FPGA的频率捷变雷达目标回波生成系统的设计与分析
子脉冲u(t)为矩形脉冲, 其表达式为
u(t)=1TRectt-T2T(2)
式中:" N为频率步进的脉冲个数;" T为子脉冲宽度; Tr为脉冲重复周期; fc为脉冲串起始频率。
设目标在径向上相对匀速运动, 速度为v, 初始相对距离为R。 第i个脉冲回波延迟时间τ可表示为[14]
τi=2(R-vt)c=2Rc-2vciTr(3)
频率步进波形回波信号可表示为
ri(t)=1N∑N-1i=0u(t-iTr)exp(-j2π(fc+iΔf)(t-τi))(4)
相参混频后的运动目标回波相位[15]为
φi=-4πcfcR-4πciΔfR+4πcifcvTr+4πci2ΔfvTr(5)
式中, 运动目标回波相位包含四部分, 即θ1=-4πcfcR, θ2=-4πciΔfR, θ3=4πcifcvTr, θ4" = 4πci2Δ fvTr。
1.2" 各项回波相位的影响
相位θ1与脉冲串起始频率fc和目标初始相对距离R有关, 与目标径向相对运动速度v无关, 实际的运动状态不影响相位θ1的值[16]。
相位θ2与回波脉冲串中脉冲序列数i呈正相关, 是线性变化, 表示不同载频脉冲因相对距离变化而引起的相位项, 包含了目标的距离信息。
相位θ3是由目标径向速度v引起的一次项, 相邻脉间相位差恒定, 与目标相对径向运动速度v呈线性变化关系。 考虑到v不变, 对于N个脉冲, 只需确定其中一个脉冲回波的θ2相位值, 就可以根据线性变化关系推导出其余N-1个θ2相位值。 在进行相参积累时, 相位θ2不会引起主瓣展宽、 峰值下降。 但在做逆傅里叶变换处理后, 目标回波单元跨距离单元走动, 体现在快时间维的回波信号包络越来越靠近起始距离单元, 导致对同一距离单元的相参积累不能兼顾全部N个回波脉冲的幅相信息, 不利于对弱目标的检测。
相位θ4是回波相位中的二次项, 在N个回波脉冲中, 随着脉冲序号i的递增, 快时间维采样点的相位θ4呈平方关系增加, 相邻脉冲间相位差是非线性的。 在采样频率不变的情况下, 相同数量的采样点覆盖了更大变化范围的相位值, 回波宽度大大展开, 总能量不变, 导致主瓣展宽、 主瓣峰值下降和位置偏移。 同时考虑相位θ2和θ4的双重影响, 目标高分辨率距离像畸变更加严重。
在实际场景中, 一次项和二次项对目标回波相位产生严重的影响, 在构建频率捷变雷达目标回波生成系统时, 要重点还原出θ1, θ2, θ3, θ4这四个相位。 目标相对运动时, 还原目标回波的实时相位变化, 是基于FPGA平台实现频率步进回波生成的关键, 是保证回波生成系统准确性的前提。 将FPGA产生的回波信号余弦分量导入到仿真软件中绘制出有/无速度补偿的回波相位变化曲线和目标高分辨率一维距离像, 便于后续的对比与分析。
2" 基于FPGA目标回波生成系统设计
本文目标回波生成系统设计采用时序逻辑结构, 对脉冲重复周期信号和信号帧进行计数, 计算目标已运动距离和剩余目标距离。 根据当前帧起始点序号, 利用rom中已储存的回波信号数学模型相位项固定系数, 还原频率步进信号回波的实时相位, 研究在目标相对径向速度恒定的情况下, 准确生成频率捷变雷达的目标回波。
本文系统根据需要, 设置不同的频率步进信号参数取值, 适配不同的频率步进雷达发射信号。 实验选取参数如表1所示。
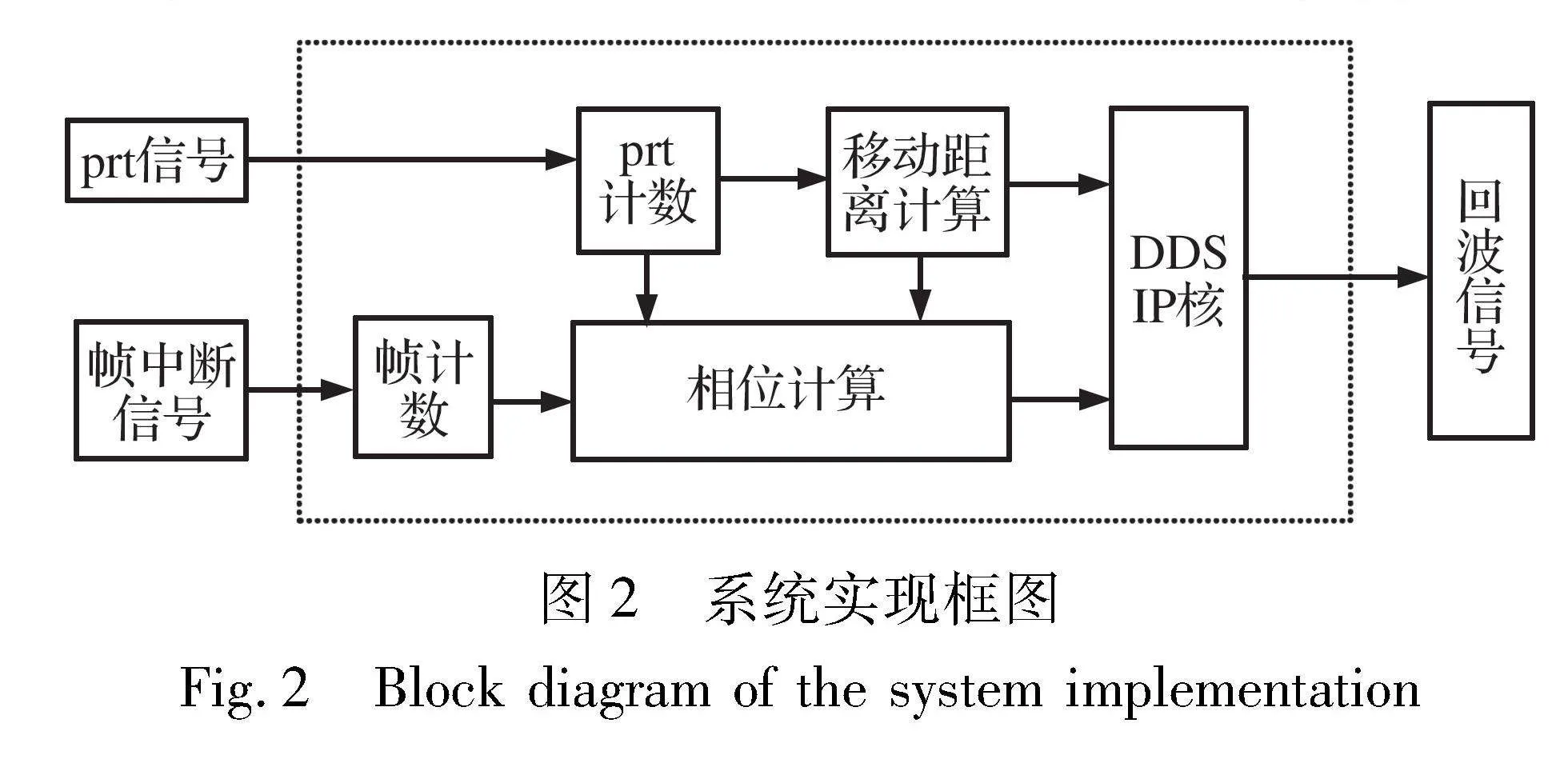
基于FPGA频率捷变雷达目标回波生成系统的实现框图如图2所示。 按照信号处理流程与时序逻辑, 系统可分为prt计数、 帧计数、 移动距离计算、 相位计算和DDS IP核5个模块。 以prt信号与帧中断信号为时序逻辑起点, prt信号经过prt计数器模块产生所需数量的脉冲重复周期信号, 再经过移动距离计算模块得到实时目标距离, 同时脉冲重复周期信号、 实时目标距离与帧计数模块的输出信号共同输入到相位计算模块, 得出实时相位值, 最后经过DDS IP核量化生成频率步进回波信号。
2.1" 帧中断信号和脉冲重复周期信号prt的产生
首先产生一个时间刻度周期为800 000的计数器, 取计数器某十个连续值作为帧数标记点, 用于后续判断其是否已进入下一帧。 在未完全循环128个脉冲重复周期时, 单脉宽采样点计数器沿时钟clk信号上升沿逐次加1, 累计5 000完成一个单脉冲的采样, 同时将已完成采样的脉冲周期计数器加1。 保持上述循环, 直到128个连续脉冲周期采样完毕, 共产生128×5 000=640 000个采样点。 在此期间, 由于200 MHz采样频率的时钟一个周期是5 ns, 一帧经历了800 000个时钟周期共4 ms, 产生了4 ms的帧中断信号和脉冲重复周期信号prt。 值得注意的是, 需要定义一个新变量, 取单脉冲采样点计数器内的连续十个点, 作为脉冲数的标记, 用于后续判断是否已进入下一个脉冲重复周期。
2.2" 帧计数变量与脉冲周期prt计数变量的产生
定义两个新中间变量分别表示上一时刻clk信号对应的帧计数器标记点值和脉冲重复周期计数器标记点值。 当两个新中间变量都为1且帧计数器标记点值和脉冲周期计数器标记点值都为1时, 认为已进入下一帧和下一脉冲重复周期。 这是因为一帧和一个脉冲内各只有一组标记点, 以标记点的上升沿作为帧计数和prt脉冲周期计数精准可靠, 是判断新脉冲重复周期的充要条件。
2.3" 目标已运动距离和剩余目标距离的计算
目标已运动距离初始值设为0, 当帧计数器加1时, 计算一次单帧4 ms时间间隔后的最新运动距离值。 根据输入变量目标距离值, 在帧数加1的同时, 输入的目标距离值减去目标已运动距离的最新值, 得到帧数及其对应的剩余目标距离值。
2.4" 当前帧起始点的计算
根据除法器模块例化定义, 一个36位宽除法器输出的高24位是商, 低12位是余数, 再定义除法器商的低16位是剩余目标距离对应的起始点序号。 通过例化一个除法器, 如果除法的余数是0, 认为当前帧起始点序号就是该余数; 如果除法的余数不是0, 没有整除, 那么认为该余数加1就是当前帧起始点序号。
2.5" 频率步进信号回波的实时相位的计算
将脉冲周期计数器除最高位外的剩余有效数据位作为地址, 输入到4个新定义的rom中, 读取coe文件储存的回波信号数学模型相位项固定系数, 然后例化四个乘法器, 每当clk信号经过上升沿时, 触发一次乘法器运算, 按照频率步进回波信号的数学建模, 分别计算4个相位项系数与对应的目标相对速度或距离的乘积, 得到回波信号的4个子相位项, 最终求和得到回波信号的实时相位。 至此, 完成基于FPGA频率捷变雷达目标回波生成系统的设计。
3" 仿真验证及结果分析
3.1" 仿真流程及参数设置
为验证基于FPGA频率捷变雷达目标回波生成系统产生的回波信号有效性和准确性, 本文针对频率步进信号进行了验证仿真。 仿真初始条件如表2所示。 FPGA产生一组I/Q正交信号, 将产生的余弦分量I数据加载到仿真验证程序中, 进行一系列信号处理, 如图3所示。
3.2" 雷达目标回波生成系统的有效性
基于FPGA频率捷变雷达目标回波生成系统, 按照表1输入各参数取值, 产生一组频率步进信号回波。 图4给出了输出变量scf_echo呈周期性分布, 经正交分解后将产生的余弦分量I数据加载到仿真验证程序中。 为方便验证仿真结果的有效性, 在目标匀速运动和匀变速运动两种状态下, 对比有/无速度补偿的目标高分辨率一维距离像。
如图5(a)所示, 回波信号经过脉冲压缩、 速度补偿和相参积累后, 得到匀速运动目标的高分辨一维距离像, 可以直观看到单散射点目标模型下目标的唯一位置, 符合目标相对运动相参积累结果。 相反, 回波信号未经速度补偿后做相参积累, 得到的匀速运动目标的高分辨一维距离像如图5(b)所示, 在快时间维的多个距离单元内存在纵向尺度接近的多个距离像峰值, 无法直接得到目标的准确位置信息, 符合目标相对运动时目标回波跨距离单元走动、 能量发散和峰值下降的典型现象。
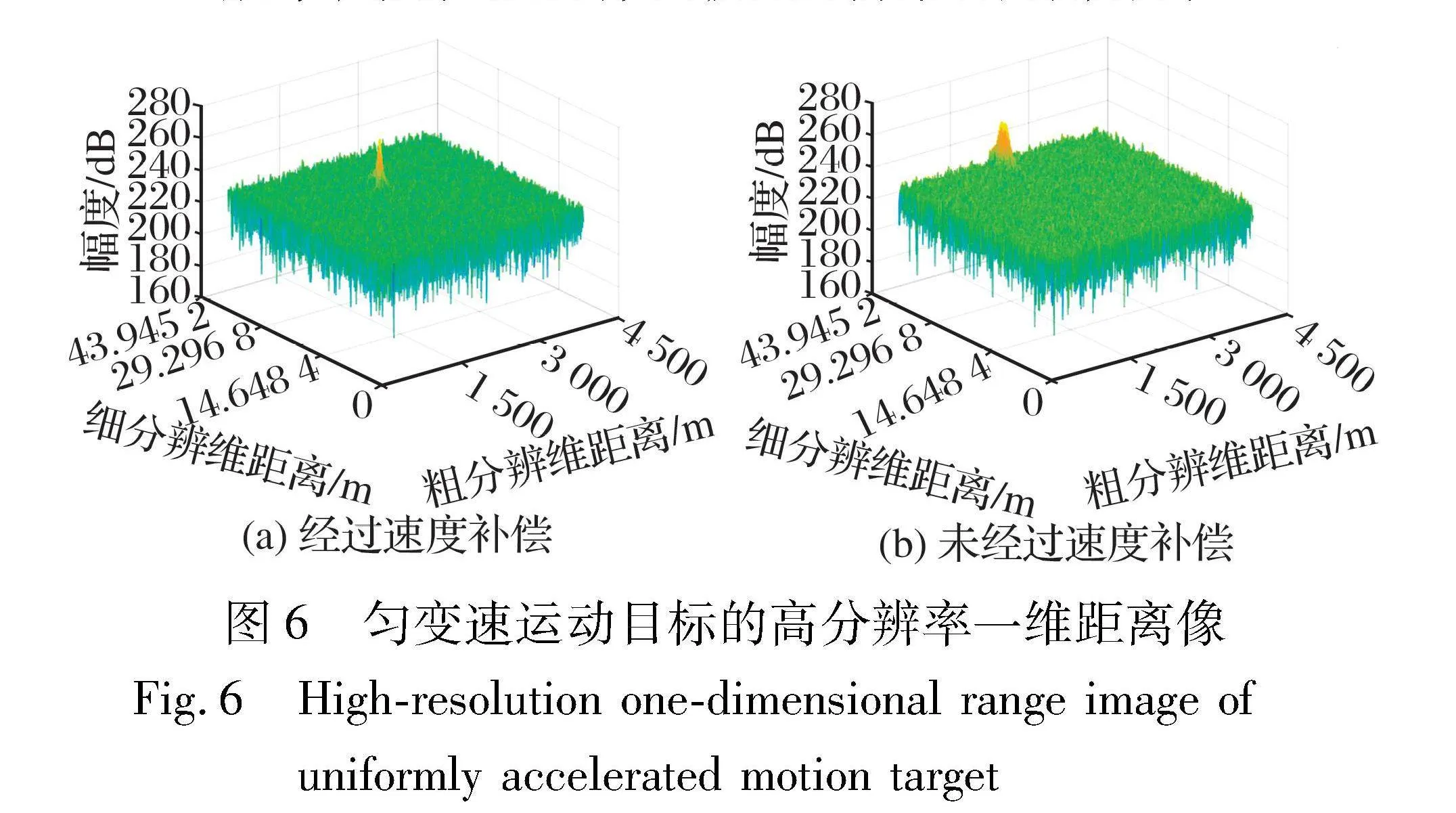
通过对比图6(a)和(b), 说明该系统产生的回波信号是有效的。 两种目标状态的仿真都可以充分验证基于FPGA频率捷变雷达目标回波生成系统的有效性。
3.3" 雷达目标回波生成系统的准确性
使用表2的仿真取值进行仿真验证时, 首先读取FPGA产生的余弦数据, 绘制出速度补偿前、 后128个脉冲的回波相位变化曲线, 如图7所示。 当目标匀速运动时, 回波相位在-π和π之间呈现非线性变化; 当进行速度补偿后, 回波相位呈线性变化, 说明基于FPGA频率捷变信号回波相位的准确性。
在仿真验证流程中, 加载FPGA数据到回波信号模型, 连续生成相差4 ms时间间隔的三帧回波信号, 绘制出三帧不同回波信号的高分辨率一维距离像。 匀速和匀变速运动目标的三帧距离像如图8~9所示。
图8中, 匀速运动目标三帧回波信号的快时间维(即粗分辨维)距离单元编号都是233, 说明它们处于同一距离分辨单元的三个不同单脉冲内。 高分辨率一维距离像峰值唯一且数值极其接近, 表明三帧回波信号经脉冲压缩、 速度补偿和相参积累后, 均能有效识别出目标。 对比三帧回波信号的慢时间维(即细分辨维)距离单元编号, 分别是156, 166和176。 在目标相对匀速径向运动的状态下, 4 ms时间间隔Δt内目标相对运动距离Δd为
Δd=VΔt(10)
频率步进信号的距离分辨率ΔR为
ΔR=c2NΔf(11)
代入参数取值计算, 可得相邻两点采样时间间隔Δt内目标相对运动距离Δd=1.4 m。 在绘制高分辨率一维距离像过程中, 做N为256的IFFT, 频率步进信号的距离分辨率ΔR=0.14 m, 表明相邻两帧回波信号的一维距离像在细分辨维需要跨越10个距离分辨单元就能显示出目标移动。 三帧回波信号的细分辨维距离单元编号正好依次相差10个, 与理论计算值一致。
设定匀变速运动目标的相对加速度为100 m/s2,其余参数取值与匀速目标相同。 经仿真得到的三帧回波信号一维高分辨率距离像, 如图9所示。 三帧回波信号的快时间维(即粗分辨维)距离单元编号都是233, 且距离像峰值唯一, 数值极其接近, 说明三帧回波信号均能有效识别出匀加速的运动目标。 但是细分辨维距离单元编号分别是156, 166和175, 这是因为40 MHz脉冲重复周期对应的脉冲重复周期Tr为25 μs, 目标经过一个脉冲重复周期速度增量为
ΔV=aΔt(12)
计算得到ΔV=0.002 5 m/s, 表示目标相对速度随步进频雷达发射信号脉冲数的增加, 呈现极小量的线性增大, 三帧信号的目标相对速度几乎不变, 体现在相同4 ms时间间隔内一帧信号移动的距离几乎没有变化。 仿真结果中细分辨维距离单元编号依次相差10和9验证了这一点, 说明该系统针对匀变速运动目标回波生成也具有较高的准确性。
通过对比目标匀速与匀变速两种运动状态下相邻三帧回波信号的细分辨维距离单元编号, 充分验证了基于FPGA频率捷变雷达目标回波生成系统的准确性。
相较于传统的信号生成方式, 该回波生成系统利用FPGA的rom储存频率步进信号的所有相位项系数, 通过增加或减少rom的有效数据位数, 改变回波相位的精
确度, 进而满足不同任务的回波信号相位准确性要求。 采用FPGA可以提高每一路的运算速率, 则目标回波每一个数据点的实时计算需要的硬件资源DSP个数也明显下降, 提高了回波信号生成的效率。 此外, 该系统还能够根据具体任务调整频率捷变信号参数取值, 具有较高的适配性。
4" 结" 论
本文针对频率捷变信号设计基于FPGA的雷达目标回波生成系统, 将以固定频率阶梯递增的频率步进信号作为研究对象, 建立匀速运动目标的步进频回波信号数学模型, 逐个分析回波相位中各个相位项对雷达目标回波的影响, 筛选出重点研究的相位项。 基于FPGA平台, 在目标匀速和非匀速两种运动状态下, 加载实时回波信号数据到仿真验证程序中, 绘制有/无速度补偿的回波相位变化曲线和高分辨率一维距离像, 对比相邻三帧回波信号的细分辨维距离单元编号。 仿真结果表明, FPGA产生的频率步进目标回波信号准确率高, 回波信号可靠有效, 运行稳定, 满足跟踪测量和模拟训练需求。 对于保证实现大宽带信号效果的同时兼顾识别有源欺骗式干扰, 还需做进一步研究。
参考文献:
[1] 叶凌溯. 高速目标回波模拟与信号处理技术研究[D]. 成都: 电子科技大学, 2022.
Ye Lingsu. Research on High-Speed Target Echo Simulation and Signal Processing Technology [D]. Chengdu: University of Electronic Science and Technology of China, 2022. (in Chinese)
[2] 车立旻. 基于FPGA的实时回波模拟器的设计与实现[D]. 成都: 电子科技大学, 2017.
Che Limin. Design and Implementation of Real Time Echo Simulator Based on FPGA[D]. Chengdu: University of Electronic Science and Technology of China, 2017. (in Chinese)
[3] 全英汇, 方文, 沙明辉, 等. 频率捷变雷达波形对抗技术现状与展望[J]. 系统工程与电子技术, 2021, 43(11): 3126-3136.
Quan Yinghui, Fang Wen, Sha Minghui, et al. Present Situation and Prospects of Frequency Agility Radar Waveform Countermea-sures[J]. Systems Engineering and Electronics, 2021, 43(11): 3126-3136.(in Chinese)
[4] 江友平. 一种基于FPGA解算的多目标回波模拟设计方法[J]. 舰船电子对抗, 2017, 40(6): 36-44.
Jiang Youping. A Design Method of Multi-Target Echo Simulation Based on FPGA Resolution[J]. Shipboard Electronic Countermea-sure, 2017, 40(6): 36-44.(in Chinese)
[5] 陈蕾, 姚远程. 基于System Generator的数字下变频设计[J]. 电子设计工程, 2012, 20(24): 74-78.
Chen Lei, Yao Yuancheng. Design of Digital Down-Conversion Based on the System Generator[J]. Electronic Design Engineering, 2012, 20(24): 74-78.(in Chinese)
[6] 庄雷, 张海龙, 李赛辉, 等. 基于FPGA的雷达目标模拟器设计[J]. 雷达与对抗, 2016, 36(4): 45-48.
Zhuang Lei, Zhang Hailong, Li Saihui, et al. Design of Radar Target Simulator Based on FPGA[J]. Radar amp; ECM, 2016, 36(4): 45-48.(in Chinese)
[7] 梁昕, 李海林. SAR目标回波模拟器的设计与实现[J]. 自动化技术与应用, 2020, 39(11): 55-59.
Liang Xin, Li Hailin. Design and Implementation of SAR Target Echo Simulator[J]. Techniques of Automation and Applications, 2020, 39(11): 55-59.(in Chinese)
[8] 李国民, 张茜, 廖桂生. 基于FPGA的雷达目标回波模拟器的设计与分析[J]. 计算机测量与控制, 2012, 20(11): 2992-2994.
Li Guomin, Zhang Qian, Liao Guisheng. Design and Analysis of Radar Target Echo Simulator Based on FPGA[J]. Computer Mea-surement amp; Control, 2012, 20(11): 2992-2994.(in Chinese)
[9] 石荣, 张礼. 雷达目标回波模拟器与雷达欺骗干扰机之间的异同对比[J]. 火控雷达技术, 2020, 49(2): 101-105.
Shi Rong, Zhang Li. Similarities and Differences between the Radar Target Echo Simulator and the Radar Deception Jammer[J]. Fire Control Radar Technology, 2020, 49(2): 101-105.(in Chinese)
[10] 王小虎, 王孝辉. 通用雷达目标模拟器的实现[J]. 电子世界, 2017(7): 161.
Wang Xiaohu, Wang Xiaohui." Realization of General Radar Target Simulator[J]. Electronics World, 2017(7): 161.(in Chinese)
[11] 任亚欣, 王瑞斌, 侯涛. 雷达回波模拟器的设计与实现[J]. 火控雷达技术, 2021, 50(1): 98-101.
Ren Yaxin, Wang Ruibin, Hou Tao. Design and Implementation of a Radar Echo Simulator[J]. Fire Control Radar Technology, 2021, 50(1): 98-101.(in Chinese)
[12] 王一鸣. 频率捷变信号目标信息提取及抗干扰性能分析[D]. 西安: 西安电子科技大学, 2020.
Wang Yiming. Target Information Extraction and Anti-Jamming Performance Analysis of Frequency Agile Signal[D]. Xi’an: Xidian University, 2020. (in Chinese)
[13] 鄢思仪. 弹载毫米波高分辨一维距离像技术研究[D]. 成都: 电子科技大学, 2018.
Yan Siyi. Research on High-Resolution One-Dimensional Range Imaging Technique of Missile-Borne Millimeter Wave[D]. Chengdu: University of Electronic Science and Technology of China, 2018. (in Chinese)
[14] 赵阳. 复杂背景下弹载雷达运动目标检测[D]. 西安: 西安电子科技大学, 2021.
Zhao Yang. Moving Target Detection for Missile-Borne Radar under Complex Environment[D]. Xi’an: Xidian University, 2021. (in Chinese)
[15] 张国兵, 赵严冰. 基于FPGA的雷达回波信号设计与实现[J]. 雷达科学与技术, 2010, 8(1): 87-90.
Zhang Guobing, Zhao Yanbing. Design and Implementation of Radar Echo Signal Based on FPGA[J]. Radar Science and Technology, 2010, 8(1): 87-90.(in Chinese)
[16] 吴兆平, 何学辉, 苏涛. 带有距离走动和多普勒扩散的高速运动目标检测[J]. 哈尔滨工程大学学报, 2010, 31(4): 476-480.
Wu Zhaoping, He Xuehui, Su Tao. Detecting Multiple High Speed Targets Using Range Migration and Doppler Spread[J]. Journal of Harbin Engineering University, 2010, 31(4): 476-480.(in Chinese)
Design and Analysis of Target Echo Signal Generation System for
Frequency-Agile Radar Based on FPGA
Chen Xukai1, Cui Bingzhe1, 2*, He Guangliang1, Guo Zhan1
(1. China Airborne Missile Academy, Luoyang 471009, China;
2. National Key Laboratory of Air-based Information Perception and Fusion, Luoyang 471009, China)
Abstract:" In order to improve the verification efficiency of signal processing algorithms for frequency-agile radar, a design method of target echo signal generation for frequency-agile radar based on FPGA is proposed. This method adopts the idea of item-by-item restoration of the echo signal phase, by establishing a mathematical model of the stepped frequency waveform echo signal, it solves the real-time phase of target echo for the target relative uniform radial motion based on FPGA, and the problem of real-time generation of target echo for frequency-agile signals. Simulation results show that in both uniform and non-uniform motion states of the target, the effectiveness and accuracy of the echo generation system is verified. By comparing the target echo phase change curves with and without velocity compensation, the target high-resolution one-dimensional distance image, and the fine-resolution distance cell numbers of the neighboring three frames echo signals, the echo phase with velocity-compensation for uniform velocity motion target is varies linearly between -π and π, and the difference of fine-resolution distance cell numbers is 10 and 10, 9 in turn at uniform and non-uniform motion states of the target.
Key words: target echo; frequency-agile signal; FPGA; high-resolution one-dimensional range image; target rela-tive uniform motion