基于关联定位误差信息素的巡航导弹集群快速协同搜索研究
2024-08-22 00:00:00陈汝佳邓亦敏段海滨
航空兵器 2024年3期
关键词:巡航导弹




摘" 要:""""" 协同搜索是巡航导弹多弹控制领域的一个未来发展方向, 对其进行研究有助于巡航导弹适应未来战场智能化作战需求。 针对缺少先验环境信息下巡航导弹集群对目标的高效搜索问题, 本文提出了一种基于关联定位误差的改进信息素快速协同搜索算法, 筛选组内精英个体领导集群成员的搜索。 在此基础上, 结合交叉测向、 位置控制、 信息融合、 自主分组等技术, 构建了适用于巡航导弹集群的具体实现架构。 通过数值仿真分析和对比, 本文构建的架构能够实现特定场景下巡航导弹集群对多未知目标的位置定位, 而提出的改进信息素搜索算法能够提升协同搜索的效率。
关键词:"""" 巡航导弹; 无人系统集群; 协同搜索; 蚁群信息素; 制导与控制
引用格式: 陈汝佳, 邓亦敏, 段海滨 ." 基于关联定位误差信息素的巡航导弹集群快速协同搜索研究[ J]. 航空兵器, 2024," 31( 3): 51-58.
Chen Rujia," Deng Yimin," Duan Haibin. Research on Fast Cooperative Search of Cruise Missile Cluster via Correlation Location Error Pheromone[ J]. Aero Weaponry, 2024," 31( 3): 51-58.( in Chinese)
中图分类号:""""" TJ765; V249
文献标识码:""" A
文章编号:"""" 1673-5048(2024)03-0051-08
DOI: 10.12132/ISSN.1673-5048.2023.0224
0" 引" 言
巡航导弹[1]是一种多以亚声速或超声速飞行, 能够自动导航, 能在非常低的大气高度按照非弹道轨迹飞行的战术武器, 是现代化作战系统的重要组成部分。 伴随人工智能和芯片技术的突破, 低成本、 强动态、 高自主的智能化弹药[2]逐渐登上舞台。 目前, 挪威海军打击导弹(Naval Strike Missile, NSM)已经具备多弹协同攻击及多目标打击能力[3]; 俄罗斯“锆石”巡航导弹(ZIRCON)则可进行“领弹-从弹”式的多弹协同作战[4]。 可见, 巡航导弹的集群化、 规模化正在成为必然的发展趋势。
协同目标搜索要求多无人系统能够实现对缺乏先验信息区域的快速感知、 覆盖和目标探查。 对协同目标搜索技术的研究一直是多无人系统控制的热门领域。 文献[5]提出一种基于深度强化学习的多无人机协同目标搜索, 对任务决策和飞行方向进行了有效优化。 文献[6]设计了一种基于有限状态机的无人机协同搜索和目标分配算法, 并设计了完整的实物平台。 文献[7]基于信息几何的多源融合无人机集群协同定位, 实现了城市、 峡谷复杂环境下的快速定位。 文献[8]设计了一种改进“长机-僚机”群体控制算法, 将无人艇聚集到期望目标, 然后采用位置反馈编队控制实现对目标的逼近和定位。 然而已有的协同目标搜索技术多以操纵性能较好的无人机、 无人艇等低速个体为被控对象, 以高速弹药为对象的研究较少。
蚁群具备在未知环境中快速寻找食物的能力, 并总能按照食物和巢穴间的最短距离运动, 这种现象的关键在于蚂蚁觅食途中留下的信息素轨迹。 蚁群对信息素的应用催生了蚁群信息素算法[9], 其机制和思想被成功应用于多无人系统协同目标搜索。 文献[10]基于蚁群算法, 实现了无人机对寻靶轨迹的求解, 能够实现计算时间复杂度和轨迹规划质量间的平衡。 文献[11]提出一种仿鸟群行为机制的无人机集群目标搜索方法, 采用信息素导引规划搜索路径, 实现对目标的信号频域和空间位置的确定。 受飞蛾寻偶机制启发, 文献[12]仿照蚁群信息素的正负更新机制, 通过考虑风势对局部信息素浓度的影响, 加速无人机对单移动目标的协同搜索能力。 但是, 已有的信息素协同目标搜索[10-12]或其他应用信息素的系统[13-14]多会对信息素更新机制进行调整, 原因是作为群智能优化算法[15]的一员, 经典蚁群信息素算法存在
收稿日期: 2023-11-17
基金项目: 国家自然科学基金项目(91948204; U20B2071; T2121003)
作者简介: 陈汝佳(2000-), 男, 浙江宁波人, 博士研究生。
*通信作者: 段海滨(1976-), 男, 山东东营人, 博士生导师。
收敛速度较慢的问题, 这限制了整体系统的性能。 换而言之, 如何提高蚁群信息素算法收敛速度, 进而提高协同搜索性能, 仍是一个值得研究的问题。
本文面向巡航导弹集群的快速协同搜索实现问题, 提出了一种基于关联定位误差的信息素搜索方法, 通过调整集群内精英个体附近信息素浓度, 进而提升协同搜索速度; 在此基础上构建了用于巡航导弹集群的信息素协同搜索架构, 实现了信息素协同目标搜索算法对巡航导弹集群的应用。 最后通过数值仿真对所提架构和改进机制的效果进行了验证。
1" 问题描述航空兵器" 2024年第31卷第3期
陈汝佳, 等: 基于关联定位误差信息素的巡航导弹集群快速协同搜索研究
假设某海域固定空间内有NSum数量的巡航导弹集群和TSum数量的静止目标。 巡航导弹集群缺乏目标精准地理信息, 需要通过集群内个体机载定位装置搜索未知目标。 当所有目标均被定位后, 整个搜索任务完成。
1.1" 环境与目标建模
当巡航导弹采用特定飞行战术时, 其飞行高度控制在10~20 m。 相比广阔海场, 导弹的高度变化可忽略不计。 此时作战场景简化为二维平面, 表示为由边长Q的最小方形网格分割的、 长和宽分别是Lx和Ly的矩形区域, 可形成M×N的数量坐标点。 位于(m, n)号网格中心的某静止目标位置可描述为(xm, yn), 满足:
xm=Q(m-1)+0.5Q," m=1, 2, …, Myn=Q(n-1)+0.5Q," n=1, 2, …, N (1)
整体任务场景参考图1。
two-dimension scene
1.2" 搜索技术建模
目标感知技术是巡航导弹协同搜索算法获取信息的前提。 到达角度测距(Angle-of-Arrival, AOA)定位是一种利用信号到达角度进行空间定位的方法[16], 根据弹载目标传感器截获待搜索信号, 利用多弹间对信号始源地的相对方位偏差推断目标位置, 其原理如图2所示。
根据图2, 假设任意两个巡航导弹Ni和Nj的空间位置分别为(xi, yi)和(xj, yj), 其与目标的方位角分别为i和j, rl=Δx2ij+Δy2ij=(xj-xi)2+(yj-yi)2为两者距离。 在实际情况下, 受外界环境扰动等因素影响, 测向过程存在误差, 此时目标位于误差四边形A-B-C-D内。 若认为测向过程相互独立, 且测向误差服从N(0, σ2)的正态分布, 可得误差为
σx=σsin2(i-j)·(Δyijcos2j+Δxijsinjcosj)2+
(Δyijcos2i+Δxijsinicosi)2
σy=σsin2(i-j)·(Δyijsinjcosj+Δxijsin2j)2+
(Δyijsinicosi+Δxijsin2i)2" (2)
计算可知定位误差Eij表示为
Eij=34σ2x+σ2y(3)
1.3" 巡航导弹单体建模
信息素搜索系统的最终控制对象为巡航导弹个体, 因此需要建立合适的巡航导弹模型。 巡航导弹常通过直接调整过载加速度改变运动状态, 由此可构建基于过载量[17]的三自由度模型:
x·=Vcosθcosψy·=Vcosθsinψh·=VsinθV·=-gsinθ+gnx" ψ·=gVcosθnyθ·=gV(nh-cosθ) (4)
式中: P=[xyh]T表示巡航导弹质心的空间位置, 其中高度h垂直向上为正; V为空速; [ψθ]分别为弹道偏角(默认导弹正向东时为0 rad, 右偏为正)和弹道倾角(默认导弹水平地面时为0 rad, 上仰为正); u=[nxnynh]T为过载系数值, 定义为对应运动方向上除重力外所有合力相对重量的比值; g为重力加速度, 取值9.8 m/s2。 为便于表示, 用X1=[xyhVψθ]T描述模型(4)运动状态。
考虑巡航导弹实际运行场景, 模型(4)需要满足如下基本约束:
-π/2≤θ≤π/2
-π≤ψ≤π
nmin≤nx, ny, nh≤nmax (5)
此时, 过载系数均受区间[nmin, nmax]约束。
图3为巡航导弹模型图。
1.4" 巡航导弹反步控制律
交叉测向的定位误差E与目标到巡航导弹的距离有关, 通过对每个巡航导弹实施位置控制, 驱动导弹逼近目标, 能够减小误差四边形范围, 从而减小定位误差。 根据模型(4)特点, 设计反步控制律实现位置控制。
首先对模型进行解耦, 设置状态向量X2:
X2=[PTP·T]=[xyhx·y·h·](6)
根据X2与u之间的关系, 可计算得到线性化矩阵:
B=gcosθcosψ-gsinψ-gsinθcosψgcosθsinψgcosψ-gsinθcosψgsinθ0gcosθ(7)
利用B将原系统解耦为参数严反馈形式, 如下:
P·1=P2
P·2=Bu-GY=P1 (8)
式中: P1=P=[x1y1h1]T; P2=[x2y2h2]T; G=[00g]T; 一阶输出量Y=[xout, yout, hout]。 由此构建三通道反步控制律[18]:
Z1=Y-Pd
V1=0.5ZT1Z1
Α1=-C1Z1+P·dV2=V1+0.5ZT2Z2(9)
此时, 期望位置向量Pd=[xdydhd]T; 一阶段误差Z1=[z11z21z31]T; 二阶段误差Z2=[z12z22z32]T; 准Lyapunov函数V1=[Vx1Vy1Vh1]T, V2=[Vx2Vy2Vh2]T; 调和函数Α1=[α1α2α3]T; C1=diag{c11c21c31}为系数对角阵。 若满足:
Bu=-C1Z·1+P¨d-Z1+C2Z2-G(10)
其中, 系数对角阵C2=diag{c12c22c32}, V1, V2指数衰减至0, 系统趋向Lyapunov稳定。 由此可得t+1时刻反步控制律如下:
uc(t+1)=[nxcnycnhc]Tt+1=
B-1(t)·
(-C1Z·1(t)+P¨(t)-
Z1(t)+C2Z2(t)-G) (11)
2" 关联定位误差信息素的协同搜索
以蚂蚁为首的真社会性昆虫在处于未知环境中时, 会共同探索环境信息、 搜索食物, 同时采用信息素作为彼此的通信媒介。 信息素的浓度将影响整个群体对局部区域的价值判断, 吸引整体向高价值区域移动。 受生物依靠信息素觅食这一行为启发, 将食源映射为待搜索目标, 以蚁群为巡航导弹集群, 设计关联定位信息素的协同搜索算法。
2.1" 信息素结构建模
实现信息素搜索的前提是构建个体信息素结构。 从搜索任务起始阶段起, 每个个体都被视作一只蚂蚁, 具备与其他个体交换信息的能力。 每只蚂蚁都维护着一条单独的信息素轨迹, 表示如下:
Hk(t)={hkp(t)}, p∈(xm, yn)(12)
式中: m=1, 2, …, M; n=1, 2, …, N;" p为二维网格地图上的某点; hkp(t)为t时刻个体k在p位置生成的信息素浓度。 在t时刻, 个体k所有的信息素浓度信息构成了其信息素轨迹结构Hk(t)。
2.2" 仿椋鸟邻域交互机制的分组策略
自主分组策略为分布式协同搜索提供组员信息。 欧椋鸟群在飞行过程中采用视觉感知邻近个体信息, 从而形成规模化集群。 文献[19]表明, 采用Delaunay三角剖分(Delaunay Triangulation, DT)方法能够模拟存在视线遮挡场合下的欧椋鸟集群行为, 如图4所示。
图中, 1到7号个体互为Delaunay三角形的顶点, 由此构成一个组群。 推广到三维空间, Delaunay剖分以四面体为基本单位, 同时内部不包含其余点, 此时构成四面体各顶点的个体构成Delaunay剖分。 由此可设计仿椋鸟群交互机制的分组策略。
在每一轮搜索开始时, 对整个集群进行三维Delaunay剖分, 寻找每个个体和其构成剖分四面体的另外3个个体, 将整个集群划分为多个组群。 然后进行组群合并, 对于某个体, 将与其共用一条Delaunay边的个体作为邻居。 接着对彼此邻居取并集, 即可生成大组Group。
2.3" 目标概率-信息素融合策略
为反映集群对环境的感知情况, 采用数据融合方法将信息素图和目标概率图整合。 在某时刻, 在同组内个体完成测向定位和信息素更新后, 将每个个体的信息素图和目标概率图归一化后叠加, 形成“目标概率-信息素”信息融合图。 随后对整个组实施内部交互, 叠加每个个体的信息融合图并归一化, 获得该组的信息融合图。 此时, 信息融合图上的概率最大点即为该组估计目标点p*(t)=(x*(t), y*(t))。
2.4" 避免重复搜索的信息素更新机制
信息素搜索依靠衰减作用实现对低价值路径的剪枝。 若一枚巡航导弹经过某网格点, 但仍未完成对目标的定位, 可认为该网格点为低价值区域。 采用负作用机制降低此处信息浓度, 避免反复搜索已知路径, 该机制如下:
hkp(t+1)=hkp(t)-γ∑Si=1lip(t), i, k∈S(13)
lip(t)=1ln{r2-[x(t)-xi(t)]-[y(t)-yi(t)]+1}
s.t. 0≤p(t)-pi(t)2lt;r(14)
式中: γ∈(0, 1)为衰减参数; r为距离阈值; pi(t)=(xi(t), yi(t))为t时刻i个体的网格位置; p(t)=(x(t), y(t))为t时刻某位置p; lip(t)为个体i信息素结构中p位置的信息素衰减值。 当p相对个体i的距离小于距离阈值r时, 就对集合S内的个体k在位置p的信息素施加衰减作用。
2.5" 时间自适应的信息素更新机制
信息素的巡航导弹集群对于环境的认知是“从无到有”的, 表现为信息素浓度的增加。 随着协同搜索的进行, 集群对环境的认知会逐渐加快, 直到趋于饱和, 由此得到如下更新策略:
hkp(t+1)=[1+κe-ωt]hkp(t)(15)
式中: κ∈(0, 1]为调节系数; ω为认知因子, 用于调节信息素浓度增加速率。 伴随时间推移, 集群的环境认知能力不断加强。 在一定时间后, 集群的认知能力达到较高水平, 但增长速度趋向饱和。
2.6" 关联定位误差的精英导引
信息素搜索作为群智能优化算法, 有时会出现收敛速度缓慢的现象, 这会增加协同搜索所需的时间, 降低系统在瞬息万变的战场上的适应能力。 因此, 为了提高搜索效率, 将关联定位误差E和信息融合后得到的高概率目标点p*(t)引入信息素更新机制, 采用精英个体领导集群运动。
本文定义的精英个体, 是某一时刻在组群S内具备最优定位误差和相距高概率目标点p*(t)最近的个体。 按照此定义, 需要首先确定组内最优误差。
在t时刻, 当集合S内个体经过两两交叉测向后, 会获得一组定位误差Φ, 描述如下:
Φ={Ei, j}(16)
式中: i, j∈S为集合内任意两个个体, 满足i≠j。 由于不同个体组合间测向角和相对目标的距离不同, 因此定位误差E各不相同, 选择Φ内最小值作为最优定位误差Es, 即
Es=argmin{Φ}(17)
随着搜索过程的进行, Es值会逐渐减小, 直到小于最小定位误差Emin, 则可认为完成对目标的搜索。 因此, 最优定位误差Es能够反映t时刻组群集合S的搜索进展。 同时, 根据式(2)~(3), 通过交叉测向得到最优定位误差Es的两个巡航导弹i和j, 相比组内其他个体更具有优势, 这种优势体现在更显著的测角定位效果和与待搜索目标更近的距离。 相比其他巡航导弹, i和j可以被视作备选精英个体。
进一步, 通过比较备选精英个体位置pi(t), pj(t)与估计目标点p*(t)间的距离, 可以得到组内精英个体opt, 如下:
popt=pi(t)," ifpi(t)-p*(t)2lt;pj(t)-p*(t)2
pj(t), ifpi(t)-p*(t)2gt;pj(t)-p*(t)2
s.t." i, j∈S, i≠j(18)
式中: opt为群组集合S内的精英个体, 其所处的网格位置popt相比其他组内成员具有更高的价值, 因此对整个组展现出领导作用。
以信息素更新角度看, 精英个体opt对组内其他个体的领导表现为popt附近的信息素浓度增加, 促使集合内其他个体向精英个体opt靠近。 由此, 设计信息素浓度更新策略, 表示如下:
ΔhSp(t)=0 """"""""""""Esgt;Emax
(eζEsEmin-1)e-p(t)-popt(t)" 2hfix Emax≥Esgt;Emin
0 Es≤Emin (19)
式中: ζ∈[0, 0.1]为调节系数; ΔhSp(t)为某网格位置p处的浓度增值; hfix为一个固定信息素增值; Emax为设置的最大定位误差阈值。
在t时刻, 当定位误差Es的值大于Emax时, 群组距离目标较远, 此时群组S相对待搜索目标较远, 此时精英导引机制不生效; 当定位误差Es小于Emin时, 群组S完成对目标的定位; 当定位误差Es的值小于Emax, 但大于最小定位误差Emin时, 精英领导机制有效, 精英个体opt对整个集群产生吸引作用, 表现为信息素增值ΔhSp(t)。
ΔhSp(t)受距离和定位误差影响。 具体来讲, 随着p(t)与popt(t)的欧式距离逐渐增大, 信息素增值逐渐减小, 这有助于引导其他个体向精英目标所处位置平滑靠近。 同时, 随着定位误差Es逐渐缩小并接近最小定位误差Emin, ΔhSp(t)的值也会减小, 这是因为随着Es的逐渐减小, 必然伴随着整体集群对待搜索目标进近。 为了防止集群在opt领导下过于靠近目标点, 影响后续搜索潜力, 精英个体的领导能力会逐渐减小, 直到Es等于Emin时, 增值ΔhSp(t)变为0。
将信息素浓度增值ΔhSp(t)引入到对每个个体的更新中, 得到如下关联定位误差的精英导引更新策略:
hkp(t+1)=hkp(t)+ρΔhSp(t), k∈S
s.t. hmin≤hkp(t+1)≤hmax, k≠opt(20)
式中: ρ∈[0, 1]为领导能力系数, 用来进一步调整精英个体的领导能力; hkp(t)和hkp(t+1)分别为t和t+1时刻集合S内个体k在位置p的信息素浓度; 更新后的hkp(t+1)不能超过设定的浓度范围[hmin, hmax]。
关联定位误差的精英导引示意图如图5所示。 随着Es的减小, 精英个体opt的在同一网格点的信息素浓度增值ΔhSp(t)减小。
3" 关联定位误差信息素集群协同搜索实现流程
Step 1: 在t=ts(s.t. ts∈(0, Tmax])时刻, 根据仿椋鸟邻域交互的分组方法确定各个巡航导弹分组Ssum={S1, S2, …}和组数Gn。 每组内两两进行测向定位, 比较得出最优定位误差Es, 通过将目标概率图与上周期信息素信息融合获得估计目标点位置p*(t)。 用Es与最小定位误差Emin比较, 当Es小于Emin, 则完成对应目标定位, 目标数量Tsum减1; 当Tsum=0, 程序结束。
Step 2: 对每个群组S内个体依次使用信息素更新算法, 将更新后的全局信息素图再次与目标概率图做信息融合, 得到的概率最大网格点对应的空间位置为t=ts+ΔT时刻期望运动位置[xd(t), yd(t)]。 为保障巡航导弹在二维平面运动, 设置hd(t)=h(0), 将Pd(t)=[xd(t)yd(t)hd(t)]T输入反步控制器中。
Step 3:" 计算Pd(t)一阶导数和二阶导数, 然后由式(11)生成得到t=ts+ΔT时刻控制量uc(t), 通过约束(5)后控制模型(4), 生成运动状态X1(t)。 所有个体更新完成后, 记录各个体运动状态X1(t)和信息素图H(t)信息。
Step 4: 判断ts+ΔT是否达到最大仿真时长Tmax。 若未达到, 则程序正常进行。 此时t=ts+ΔT, 本轮仿真结束, 回到Step1。 不断重复, 直到达到最大仿真时长Tmax, 程序结束。
基于关联定位误差信息素的搜索流程如图6所示。
4" 数值仿真
对关联定位误差信息素集群协同搜索算法设计数值仿真实验," 验证算法在散布作战工况的有效性, 并分析改进机制对搜索速度的影响。
当巡航导弹集群进入作战空间后开始进行随机散
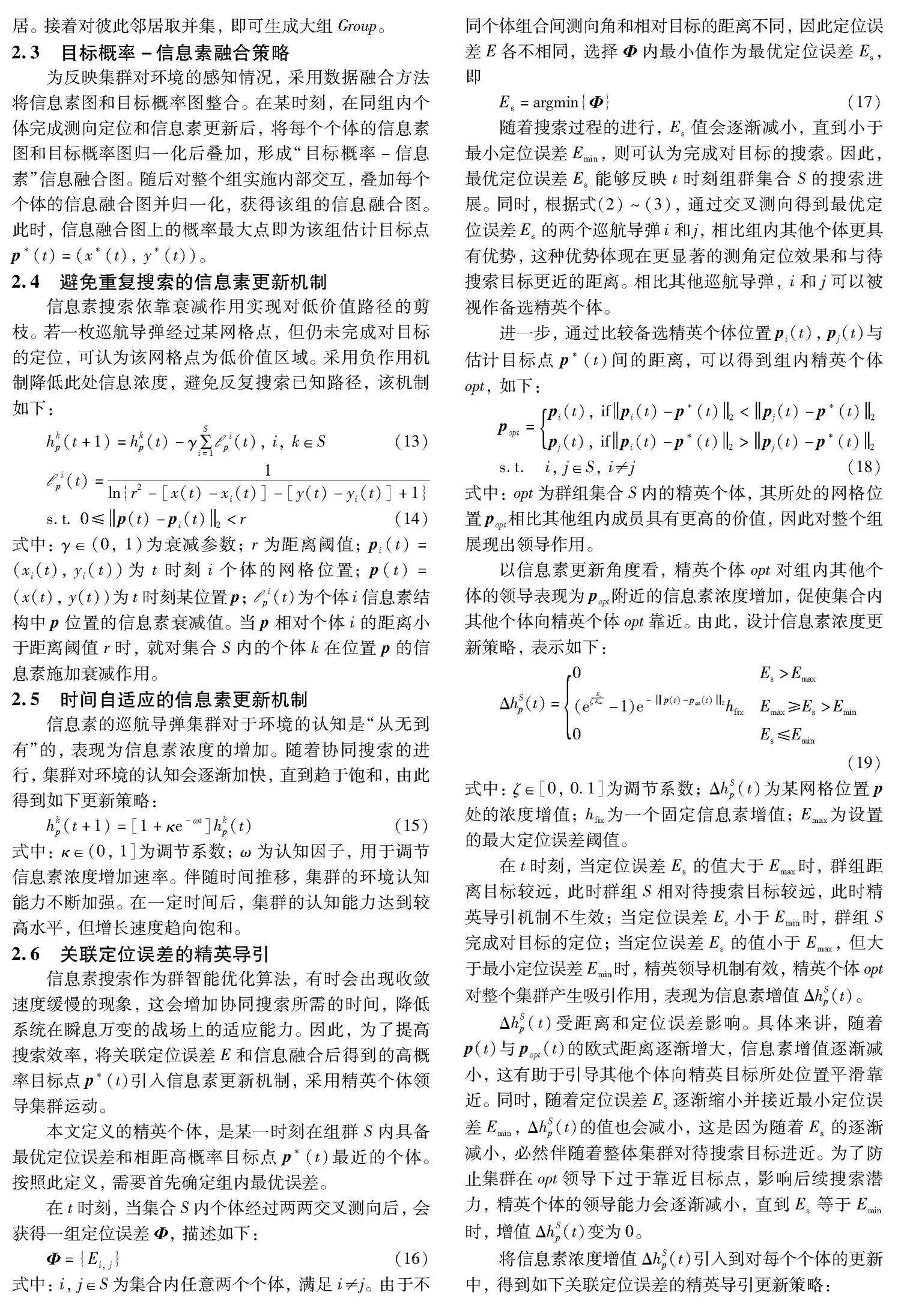
布。 在接收到指挥部指令后, 集群开始执行协同搜索任务。 此时, 巡航导弹随机散布于作战场地, 以接收指令时刻作为初始时刻, 即t=0。 设置仿真最小步长ΔT=1 s, 搜索任务最大仿真时长Tmax=100 s; 地图大小Lx=Ly=50 km, 采用边长Q=500 km网格将地图划分为M=N=101等份; 设置巡航导弹集群数量Nsum=32, 目标数量Nsum=5。 任务开始时, 巡航导弹的初始位置随机散布在xm∈[5, 49] km, yn∈[5, 49] km范围内, 高度控制在[15, 20] m之间, 初始速度340 m/s。 设置最小定位误差Emin为500 m, 当定位误差Es小于该值时认为完成对该目标的搜索。 其余仿真实验参数设置如表1所示。
图7展示了不同时刻巡航导弹集群的运动情况和搜索对象。" 紫色圆点为待搜索目标精确位置;" 带箭头红色圆点为巡航导弹当前时刻位置; 白色虚线为巡航导弹搜索对象。 0~29 s, 巡航导弹集群对5个目标完成了搜索定位。 在控制律作用下, 巡航导弹逐渐向待搜索目标迫近, 并在完成对待搜索目标的定位后转向目标。 在仿椋鸟交互的分组算法下, 巡航导弹集群仅根据组内信息连通性动态调节自身组别, 而不形成固定的分组结构, 能够实现组内的分布式信息传递。
表2描述了目标点被定位时的时刻、 估计位置和误差。 随着搜索过程的进行, 各目标点的估计位置能够靠近真实值, 同时最终定位误差均被控制到最小定位误差以下, 表现出良好的定位效果。 图8为定位误差随迭代过程进行的变化曲线, 直观展示了定位误差收敛的过程。 随着集群搜索迭代的进行, 被探测目标的空间定位误差呈现下降趋势, 并在29 s时全部达到最小定位误差。 此结果与表2保持一致。
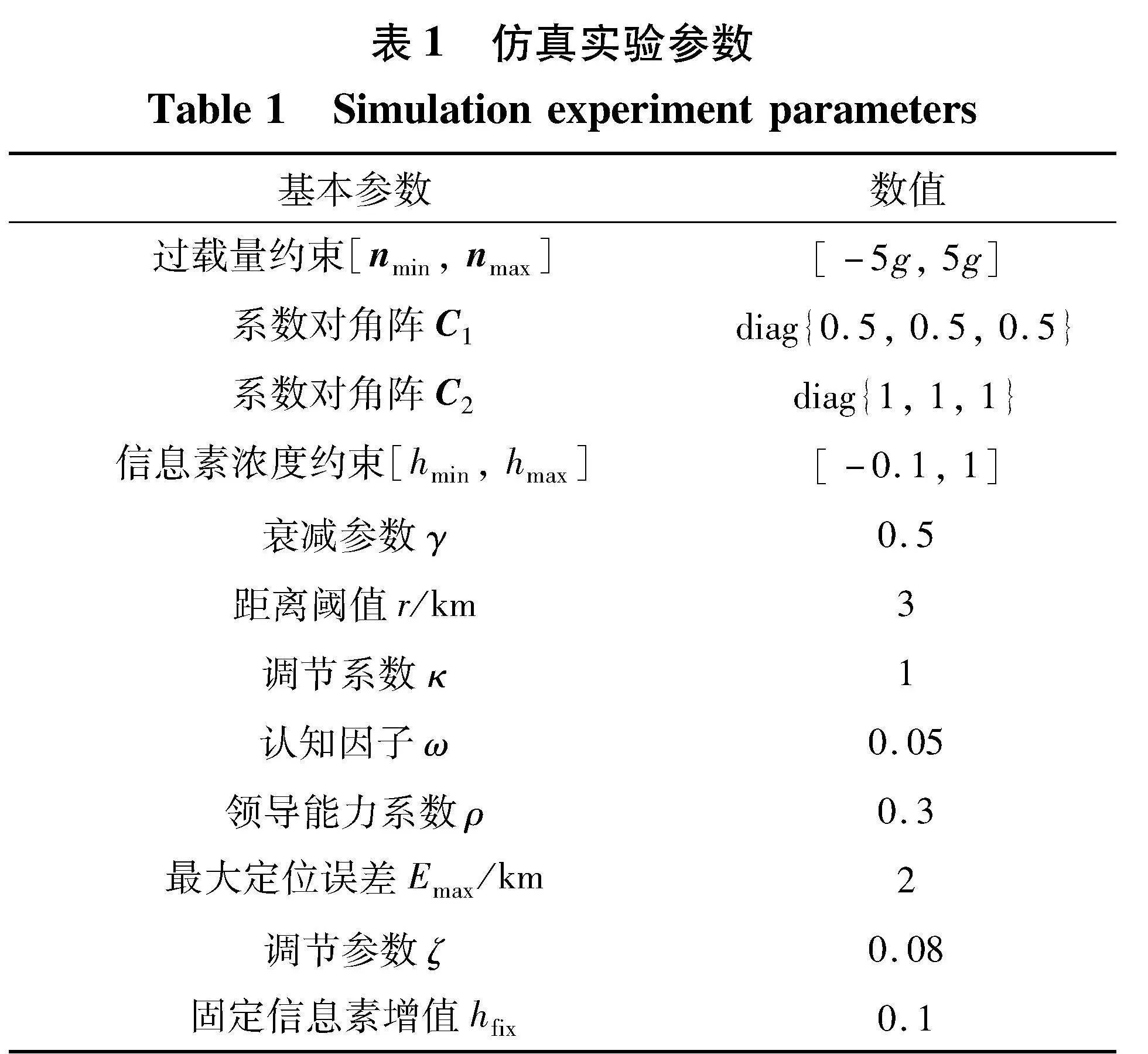
图9为29 s时巡航导弹全局信息融合图。 图中h轴为全局所有个体搜索后得到的融合概率。 相比其他位置, 待搜索目标点处概率明显较高, 形成了陡峭尖峰。 该现象说明巡航导弹集群在协同交互与信息共享下," 实现了对真实目标区域的逼近。 同时, 在巡航导弹经过的位置,
感知地图留下一条数值为-0.1的概率轨迹。 这说明集
群内个体能降低已搜索过地区的概率, 使得其余个体不再关注此块地区。 以上结果验证了关联定位误差信息素的巡航导弹协同搜索算法的有效性。
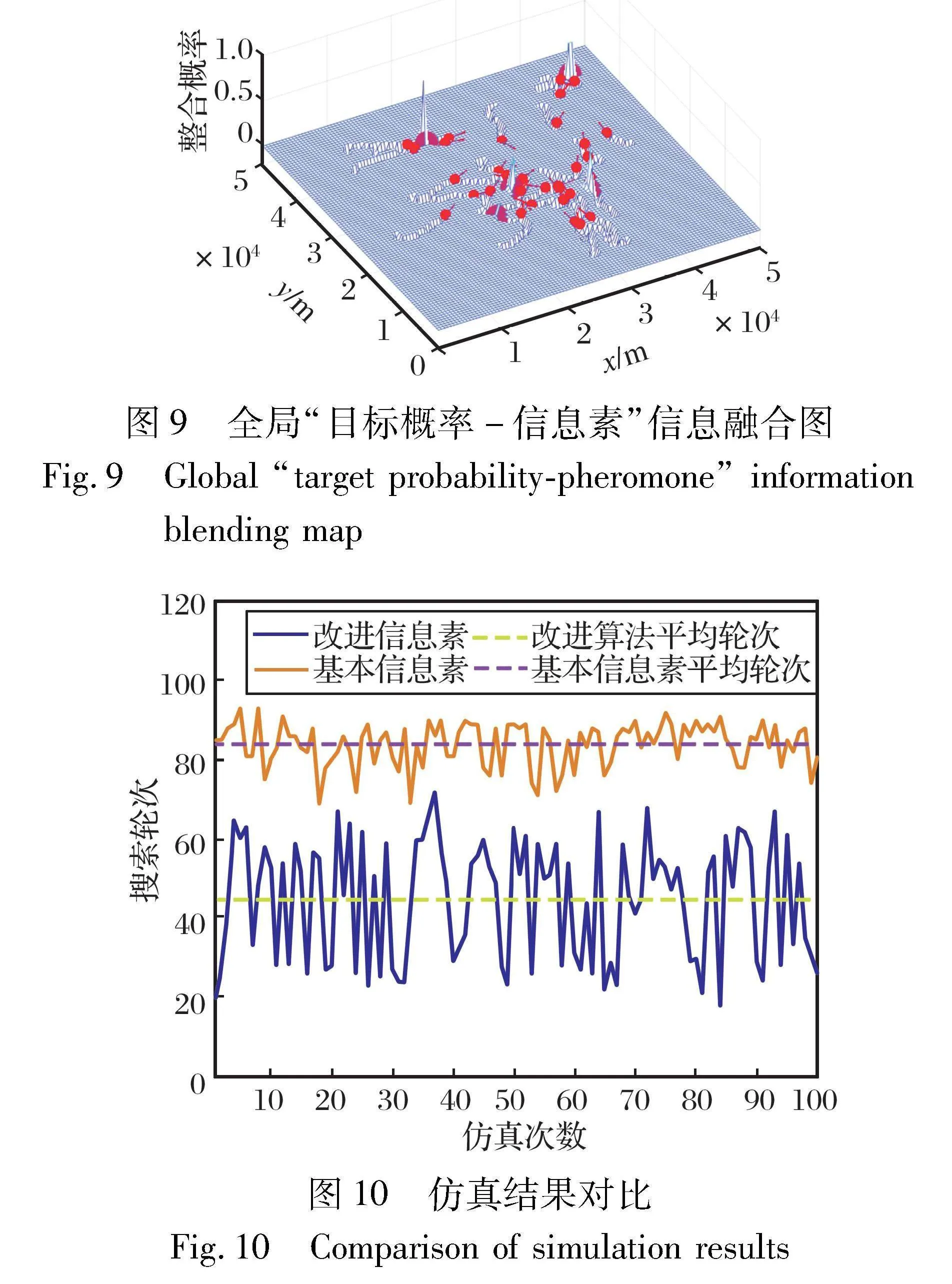
为进一步验证改进机制的有效性, 将改进后算法与文献[9]的基本信息素算法做比较, 进行了共100次仿真实验。 每次实验开始时, 固定巡航导弹数量32个和目标数量5个, 然后分别随机初始化巡航导弹状态和目标位置, 并将初始化的结果输入到两个算法中, 记录两个算法每次收敛所用时间, 绘制轮次对比曲线, 如图10所示。
基本信息素搜索算法的平均轮次为83.8轮, 最小搜索轮次为69轮; 基于关联定位误差的信息素搜索算法平均轮次为44.81轮, 最小搜索轮次为18轮。 可知在相同初始条件下, 基于关联定位误差信息素的搜索算法拥有整体更低的搜索轮次, 这是因为所设计的精英导引策略能够领导集群个体向目标快速逼近。 仿真结果表明, 改进后的算法能够提高随机位置目标搜索场景下巡航导弹集群的搜索速度。
5" 结" 论
为实现巡航导弹集群的快速协同搜索, 提出一种关联定位误差的信息搜索算法。 该方法引入交叉测向定位获得的最优定位误差, 根据最优定位误差和个体与疑似目标空间位置, 确定集群内的精英个体, 并通过调整精英个体附近信息素浓度领导同组成员; 考虑巡航导弹控制特点, 设计了适用于巡航导弹集群的信息素协同搜索架构。 数值仿真实验验证了所设计架构的有效性; 对比实验证明了所提改进算法的优越性, 能够提升集群定位速度。
未来的研究将进一步拓宽巡航导弹集群的应用场景, 在充分考虑导弹天然约束情况下, 提升弹药集群的自主性和智能性, 构建更真实、 适用性更强的分布式巡航导弹作战集群。
参考文献:
[1] 林功勋," 滕海. 巡航导弹的特点与防御难点研究[J]. 军事文摘," 2023(1): 41-45.
Lin Gongxun," Teng Hai. Research on Characteristics and Defense Difficulties of Cruise Missile[J]. Military Digest," 2023(1): 41-45.(in Chinese)
[2] Liu D W," Sun J," Huang D G," et al. Research on Development Status and Technology Trend of Intelligent Autonomous Ammunition[J]. Journal of Physics: Conference Series," 2021," 1721(1): 012032.
[3] 刘果, 苏炯铭, 罗俊仁.智能导弹作战能力分析与作战运用模式研究[C]∥ 中国自动化大会, 2022: 593-599.
Liu Guo," Su Jiongming," Luo Junren. Operational Capabilities Analysis and Operational Applications Research of Intelligent Missiles[C]∥ China Automation Conference," 2022: 593-599. (in Chinese)
[4] 孟二龙," 高桂清," 王康," 等. 俄罗斯锆石高超声速智能反舰导弹主要优势及启示[J]. 飞航导弹," 2019(11): 34-38.
Meng Erlong," Gao Guiqing," Wang Kang," et al. Main Advantages and Enlightenment of Russian Zircon Hypersonic Intelligent Anti-Ship Missile[J]. Aerodynamic Missile Journal," 2019(11): 34-38.(in Chinese)
[5] Luo Q Y," Luan T H," Shi W S," et al. Deep Reinforcement Learning Based Computation Offloading and Trajectory Planning for Multi-UAV Cooperative Target Search[J]. IEEE Journal on Selected Areas in Communications," 2023," 41(2): 504-520.
[6] Liu X Y," Lin Z C," Niu Y B," et al. A Multi-UAV Cooperative Search System Design Based on Man-in-the-Loop[C]∥3rd International Conference on Unmanned Systems (ICUS)," 2020: 757-762.
[7] Tang C K," Wang Y Y," Zhang L L," et al. Multisource Fusion UAV Cluster Cooperative Positioning Using Information Geometry[J]. Remote Sensing," 2022," 14(21): 5491.
[8] Li L A," Li Y P," Zeng J B," et al. A Research of Multiple Autonomous Underwater Vehicles Cooperative Target Hunting Based on Formation Control[C]∥6th International Conference on Automation," Control and Robotics Engineering (CACRE)," 2021: 22-27.
[9] Dorigo M," Di Caro G," Gambardella L M. Ant Algorithms for Discrete Optimization[J]. Artificial Life," 1999," 5(2): 137-172.
[10] Perez-Carabaza S," Besada-Portas E," Lopez-Orozco J A," et al. Ant Colony Optimization for Multi-UAV Minimum Time Search in Uncertain Domains[J]. Applied Soft Computing," 2018," 62: 789-806.
[11] Shen Y K," Wei C," Sun Y B," et al. Bird Flocking Inspired Methods for Multi-UAV Cooperative Target Search[J/OL]. IEEE Transactions on Circuits and Systems II: Express Briefs," 2023: 1.
[12] 刘云昊," 邓亦敏," 段海滨," 等. 基于飞蛾信息素寻偶机制的无人机集群协同搜索[J]. 国防科技大学学报," 2022," 44(4): 22-31.
Liu Yunhao," Deng Yimin," Duan Haibin," et al. Unmanned Aerial Vehicle Swarm Cooperative Search Based on Moth Pheromone Courtship Mechanism[J]. Journal of National University of Defense Technology," 2022," 44(4): 22-31.(in Chinese)
[13] Xie X W," Tang Z H," Cai J J. The Multi-Objective Inspection Path-Planning in Radioactive Environment Based on an Improved Ant Colony Optimization Algorithm[J]. Progress in Nuclear Energy," 2022," 144: 104076.
[14] Luo Q," Wang H B," Zheng Y," et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Neural Computing and Applications," 2020," 32(6): 1555-1566.
[15] 刘雪," 田云娜," 田园." 群智能算法研究综述[J]. 信息与电脑(理论版)," 2021," 33(24): 63-69.
Liu Xue," Tian Yunna," Tian Yuan. A Survey of Swarm Intelligence Methods[J]. Information amp; Computer," 2021," 33(24): 63-69.(in Chinese)
[16] 钟建林," 刘方," 石章松," 等. 基于测向交叉定位的空舰导弹协同攻击方法[J]. 航空兵器," 2019," 26(4): 47-53.
Zhong Jianlin," Liu Fang," Shi Zhangsong," et al. Coordinated Attack Method for Air-to-Ship Missiles Based on Beam-Crossing Locating[J]. Aero Weaponry," 2019," 26(4): 47-53.(in Chinese)
[17] 钱杏芳," 林瑞雄," 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000: 59-60.
Qian Xingfang," Lin Ruixiong," Zhao Yanan. Missile Flight Mechanics[M]. Beijing: Beijing Insititute of Technology Press," 2000: 59-60. (in Chinese)
[18] Zhou J," Wen C," Zhou J," et al. Adaptive Backstepping Control[M]. Berlin: Springer," 2008: 9-31.
[19] 于月平," 段海滨," 范彦铭," 等." 仿欧椋鸟大规模超机动行为的无人机集群转弯控制[J]." 机器人," 2020," 42(4):" 385-393.
Yu Yueping," Duan Haibin," Fan Yanming," et al. Turning Control of Multiple UAVs Imitating the Super-Maneuver Behavior in Massive Starlings[J]. Robot," 2020," 42(4): 385-393.(in Chinese)
Research on Fast Cooperative Search of Cruise Missile Cluster via
Correlation Location Error Pheromone
Chen Rujia, Deng Yimin, Duan Haibin*
(Beihang University, Beijing 100083, China)
Abstract: Cooperative search is a future development direction in the field of cruise missile multi-projectile control," and its research is helpful for cruise missile to adapt to the future battlefield intelligent operation requirements. To solve the problem of efficient target search of cruise missile cluster in the absence of prior environmental information," an improved pheromone fast collaborative search algorithm based on correlation location error is proposed," which selects elite individuals within the group to lead the search of cluster members. On the basis of this," this paper combines cross direction finding," position control," information fusion," autonomous grouping and other methods to build a specific implementation architecture suitable for cruise missile cluster. Through numerical simulation analysis and comparison," the architecture constructed in this paper can realize the location of cruise missile cluster to multiple unknown targets in the sea-skimming scenario," and the proposed enhanced pheromone search algorithm can improve the efficiency of collaborative search.
Key words: cruise missile; unmanned system cluster; cooperative search; ant pheromone; guidance and control
猜你喜欢
小学生学习指导·小军迷联盟(2024年3期)2024-04-23 06:16:01
环球时报(2022-08-18)2022-08-18 17:15:05
军民两用技术与产品(2021年9期)2021-11-27 06:29:31
军事文摘(2020年24期)2020-02-06 05:56:36
环球时报(2019-01-18)2019-01-18 04:12:25
军事文摘(2017年8期)2017-08-11 13:00:35
西北工业大学学报(2015年4期)2016-01-19 03:31:42
导弹与航天运载技术(2016年2期)2016-01-03 15:49:25
儿童故事画报·智力大王(2015年6期)2015-08-17 00:57:45