汽车道路滑行阻力测量滤波算法研究
2024-08-07 00:00:00王斌华彬邱冉冉
汽车科技 2024年4期


摘 要:底盘测功机作为一种重要的室内测试设备,准确的道路载荷阻力系数是其精确工作的先决条件。目前经常使用VBOX测量道路载荷阻力系数。VBOX测速依赖于精确的卫星定位来实现,日常使用中卫星信号易受环境干扰,导致测量精度下降,影响试验结果的准确性。本文通过研究小波变换、最小二乘法滤波、滑动平均值滤波三种滤波算法对试验数据处理效果和稳定性的影响,得出:(1)三种滤波算法对于滑行试验数据稳定性都有着明显的提升;(2)对于单独的滑行工况,最小二乘法滤波表现最为优异;(3)对于复杂工况,小波滤波和滑动平均滤波都可进行较好的滤除噪声信号,但是小波滤波算法不易受极值影响。
关键词:汽车道路滑行阻力;小波变换;最小二乘法滤波;滑动平均值滤波
中图分类号:U467.1 文献标志码:A 文章编号:1005-2550(2024)04-0095-07
Research on Filtering Algorithms for Automotive Road Load Coefficient Measurement
WANG Bin, HUA Bin, QIU Ran-ran
( National Automobile Quality Inspection and Test Center (Xiangyang),
Xiangyang 441004, China)
Abstract: Chassis dynamometer, as an important indoor testing equipment, requires accurate road load coefficient as a prerequisite for precise operation. Currently, VBOX is commonly used to measure the road load coefficient. VBOX speed measurement relies on accurate satellite positioning, but the satellite signal is easily affected by environmental interference in daily use. leading to a decrease in measurement accuracy and affecting the accuracy of test results. This article studies the impact of three filtering algorithms, wavelet transform, least squares method filtering, and moving average filtering, on the accuracy of test results. The following conclusions are drawn: (1) The three filtering algorithms significantly improve the stability of the coastdown test data. (2) For individual coastdown conditions, the least squares method filtering performs the best. (3) For combined conditions, both wavelet filtering and moving average filtering can effectively filter out noise signals, but the wavelet filtering algorithm is less affected by extreme values, resulting in more stable filtered data.
Key Words: Automotive Road Load; Wavelet Transform; Least Squares Method Filtering; Moving Average Filtering
引 言
汽车的经济性一直是汽车评价的重要维度,不管是传统燃油车的油耗水平,还是新能源汽车的续驶里程,都是用户在买车时重点关注的技术指标,一个车型的经济性表现,对市场销售量有着很大的影响。近几年,随着新能源汽车的高速发展,传统车市场受到了很大挑战。在大力推行新能源汽车的政策背景下,国家又于2017年09月出台了“双积分”政策,降低传统车的油耗,增加新能源车型的研发和产出,已经是各个汽车企业不得不采取的措施。
由于道路试验易受环境因素如风速、温度等影响,而底盘测功机可以很大避免环境因素对汽车试验结果的影响,因此,当前车辆燃油消耗量和续驶里程的测定主要依靠底盘测功机来模拟真实车辆的道路行驶阻力来进行。
在使用底盘测功机进行续驶里程、燃油消耗量等测试时,需要通过输入阻力系数来模拟道路滑行阻力。阻力系数测量的准确性,会很大程度地影响试验结果的准确性。文献[1]使用Matlab将数据进行排列组合,筛选出统计精度合格的数据组合方式,来作为输入数据求取道路阻力系数。文献[2]、文献[3]采用优化阻力系数的拟合方式来获得阻力系数的最优解。本文使用滤波算法来过滤试验过程不确定因素引起的噪声信号,得到更逼近于真实状态的试验曲线(表现为统计精度的提升),以此来提升道路滑行阻力系数测量的准确性。
1 道路滑行阻力的试验方法
在国标中,滑行阻力的测量方法把测量对象分为轻型车和重型车,轻型车道路载荷参照标准为GB 18352.6-2016附件CC,重型车道路载荷测量参考标准为GB/T 27840-2021附录C。
1.1 道路滑行动力学模型
由(6)式可得,要测量vi车速对应的道路滑行阻力Fvi,只需要测量测量vi时 。
将Fvi带入(5)式,进行拟合,可以得到滑行阻力曲线阻力系数A,B,C的值,为了尽量消除环境因素导致的空气阻力不同,滑行试验标准采用了阻力系数校正的方法,将阻力校正至基准状态(大气压100kPa,温度20℃,风速0m/s),最终得到基准状态下滑行阻力曲线阻力系数A0,B0,C0的值,将该系数输入底盘测功机来模拟道路载荷。
1.2 的测量
从上小节可得出,道路滑行阻力测量实际上就是测量 的过程,GB 18352.6-2016附件CC和GB/T 27840-2011附录C中关于 的测量流程都有详细规定。在实际测量中,通常先使用VBOX采用滑行法记录车辆滑行过程中的速度—时间曲线,然后通过时间历程曲线计算基准车速vi对应的车辆车速从(vi+∆v)到(vi-∆v)所用时间。基准车速vi下的第n对滑行试验往返进行,往方向记为∆ti-n-a、返方向记为∆ti-n-b。对于每个基准车速,轻型车最少需要获得3对测量结果,重型车最少需要获得4对测量结果,重型车采用往返数据的算术平均值作为单次试验结果∆ti-n,轻型车使用双向滑行时间的调合算术平均值(公式(7))。
依据标准要求,重型车统计精度pi要求在30km/h-70km/h速度点范围内不大于4%,在其他速度点不大于5%,轻型车统计精度不大于3%。滑行阻力测试对数据稳定性有着比较高的要求,由表1可知,h随着滑行次数的增加而减小,同标准差数据计算出的精度值也随之下降,因此通常为了满足统计精度要求,需要增加足够的滑行次数,随之而来的是人力和物力等成本的增加。因此在尽量少的滑行次数下能满足试验的统计学精度要求就显得尤为重要,这就需要VBOX在试验过程中有较高的测量精度。
图1是某次滑行试验中采集的135km/h-105km/h的数据,很容易看出,部分试验数据跳动幅度较大,经分析,发现数据跳动幅度大的位置,卫星数量发生了突变(卫星数量减少,从9减小到6),经对比GPS定位图和实地勘探,发现样车在靠近防风林车道(图1)试验时出现上述情况。卫星信号强度受附近遮挡物影响,会影响试验过程的数据准确性。试验场防风林对降低道路侧向风有着重要的作用的同时,也影响了卫星信号的强度。
VBOX手册推荐在卫星数不小于9个时进行试验,图2是分别是卫星数为大于9(红色)和小于9(黄色)的数据,可看出曲线虽有所改善,但仍有比较明显的噪声信号存在。
2 滤波算法
滤波算法通过量测已知量来估计系统状态,尽可能降低噪声信息对有用信息的影响,从而得到一个接近真实的状态估计。滑行试验在统计精度方面有着比较高的要求,而常用测量工具VBOX在卫星数比较少的情况下,存在着数据噪声过大的问题,滤波算法是解决数据噪声问题的强力工具。
2.1 小波变换
小波变换是一种信号的时间-频率分析方法,具有多分辨率的特点,其在高频部分具有较高的时间分辨率和较低的频率分辨率,在低频部分具有较低的时间分辨率和较高的频率分辨率,很适合于探测正常信号中夹带的瞬态反常信号并展示其成分[4]。
2.1.1 连续小波变换
将任意Li(R)空间中函数f(t)在小波基下进行展开,称这种展开为函数f(t)的连续小波变换(Continue Wavelet Transform ,简记为CWT),表达式为:
其中Ψ(x)为小波函数Ψ(x)的复数共轭,a为缩放因子,τ为平移因子。
2.1.2 离散小波变换
离散小波变换(Discret Wavelet Transform,简记为DWT)和连续小波变换主要的区别是:离散小波变换对尺度和平移因子使用离散值。通常的做法是把尺度按幂级数进行离散化,即取a=a0m(m为整数,a0≠1,a0通常取2)。
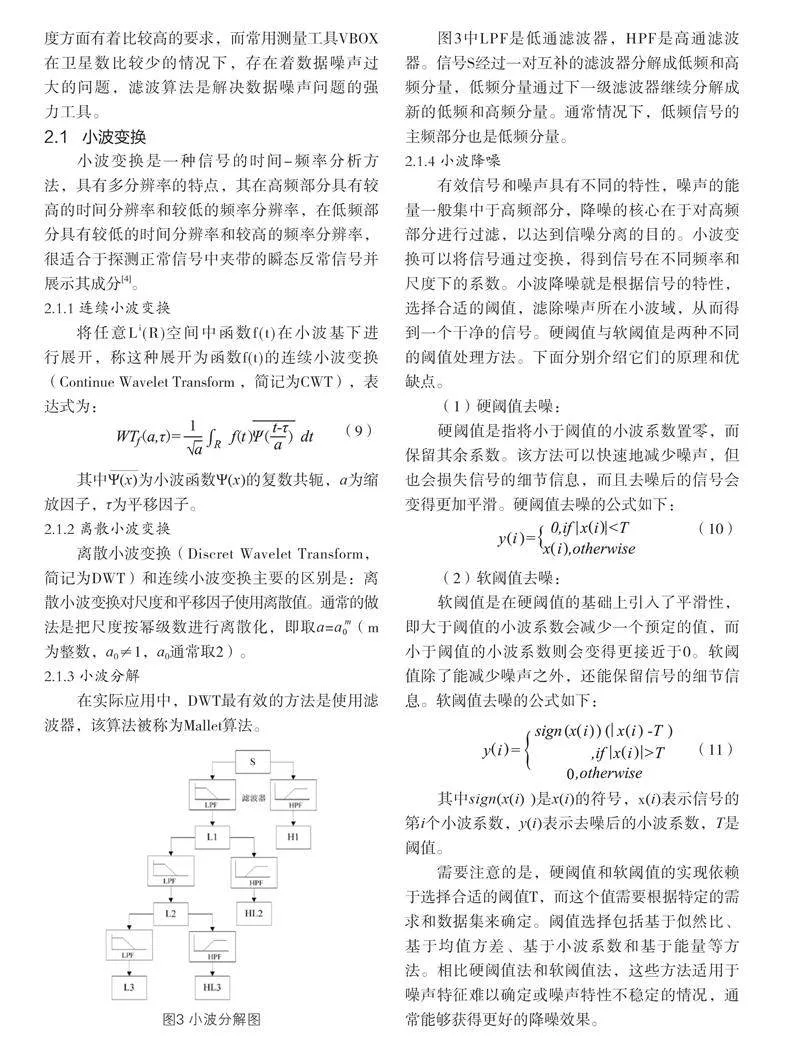
2.1.3 小波分解
在实际应用中,DWT最有效的方法是使用滤波器,该算法被称为Mallet算法。
图3中LPF是低通滤波器,HPF是高通滤波器。信号S经过一对互补的滤波器分解成低频和高频分量,低频分量通过下一级滤波器继续分解成新的低频和高频分量。通常情况下,低频信号的主频部分也是低频分量。
2.1.4 小波降噪
有效信号和噪声具有不同的特性,噪声的能量一般集中于高频部分,降噪的核心在于对高频部分进行过滤,以达到信噪分离的目的。小波变换可以将信号通过变换,得到信号在不同频率和尺度下的系数。小波降噪就是根据信号的特性,选择合适的阈值,滤除噪声所在小波域,从而得到一个干净的信号。硬阈值与软阈值是两种不同的阈值处理方法。下面分别介绍它们的原理和优缺点。
(1)硬阈值去噪:
硬阈值是指将小于阈值的小波系数置零,而保留其余系数。该方法可以快速地减少噪声,但也会损失信号的细节信息,而且去噪后的信号会变得更加平滑。硬阈值去噪的公式如下:
(2)软阈值去噪:
软阈值是在硬阈值的基础上引入了平滑性,即大于阈值的小波系数会减少一个预定的值,而小于阈值的小波系数则会变得更接近于0。软阈值除了能减少噪声之外,还能保留信号的细节信息。软阈值去噪的公式如下:
其中sign(x(i) )是x(i)的符号,x(i)表示信号的第i个小波系数,y(i)表示去噪后的小波系数,T是阈值。
需要注意的是,硬阈值和软阈值的实现依赖于选择合适的阈值T,而这个值需要根据特定的需求和数据集来确定。阈值选择包括基于似然比、基于均值方差、基于小波系数和基于能量等方法。相比硬阈值法和软阈值法,这些方法适用于噪声特征难以确定或噪声特性不稳定的情况,通常能够获得更好的降噪效果。
2.2 最小二乘滤波
最小二乘滤波基于最小二乘法是一种全局优化的滤波算法,旨在平滑小梯度区域,保留大梯度区域,寻找最接近样本值的理论值,其评价函数如下[5]:
该算法通常存在信号输出延迟,延迟时间为 。
3 滤波算法验证
本节将使用VBOX卫星数低于8的数据,对前文讲的三种滤波算法进行验证。
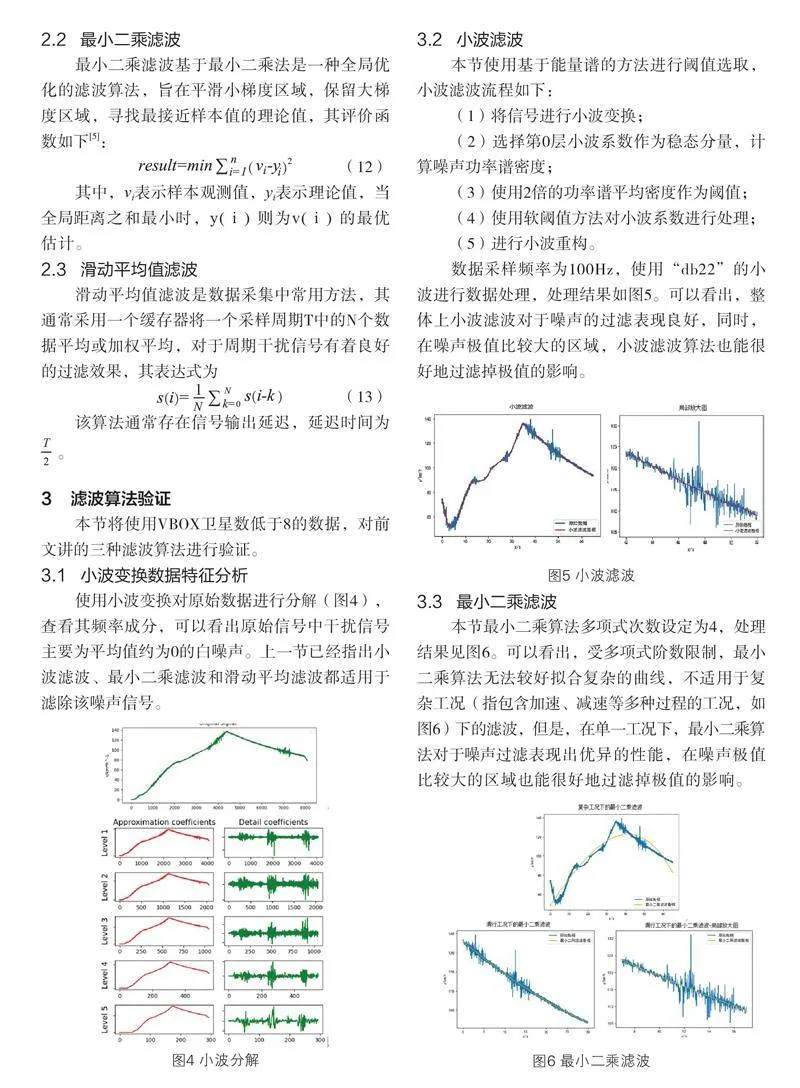
3.1 小波变换数据特征分析
使用小波变换对原始数据进行分解(图4),查看其频率成分,可以看出原始信号中干扰信号主要为平均值约为0的白噪声。上一节已经指出小波滤波、最小二乘滤波和滑动平均滤波都适用于滤除该噪声信号。
3.2 小波滤波
本节使用基于能量谱的方法进行阈值选取,小波滤波流程如下:
(1)将信号进行小波变换;
(2)选择第0层小波系数作为稳态分量,计算噪声功率谱密度;
(3)使用2倍的功率谱平均密度作为阈值;
(4)使用软阈值方法对小波系数进行处理;
(5)进行小波重构。
数据采样频率为100Hz,使用“db22”的小波进行数据处理,处理结果如图5。可以看出,整体上小波滤波对于噪声的过滤表现良好,同时,在噪声极值比较大的区域,小波滤波算法也能很好地过滤掉极值的影响。
3.3 最小二乘滤波
本节最小二乘算法多项式次数设定为4,处理结果见图6。可以看出,受多项式阶数限制,最小二乘算法无法较好拟合复杂的曲线,不适用于复杂工况(指包含加速、减速等多种过程的工况,如图6)下的滤波,但是,在单一工况下,最小二乘算法对于噪声过滤表现出优异的性能,在噪声极值比较大的区域也能很好地过滤掉极值的影响。
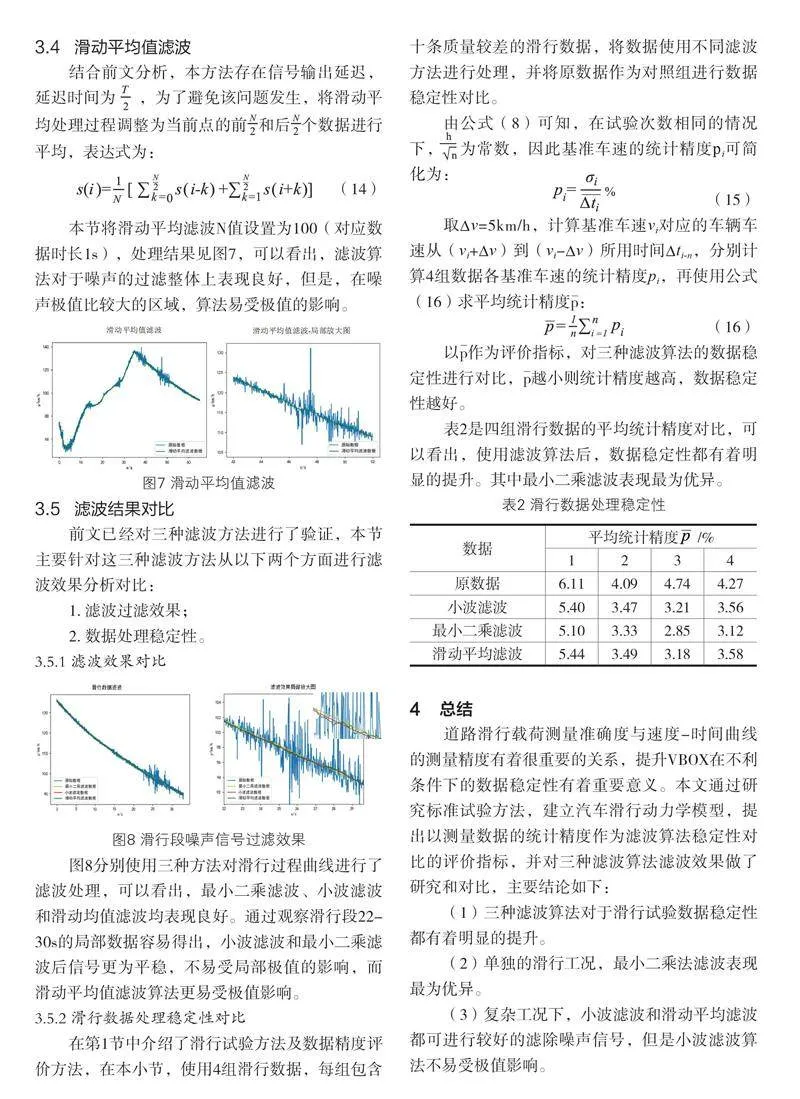
3.4 滑动平均值滤波
结合前文分析,本方法存在信号输出延迟,延迟时间为 ,为了避免该问题发生,将滑动平均处理过程调整为当前点的前和后个数据进行平均,表达式为:
本节将滑动平均滤波N值设置为100(对应数据时长1s),处理结果见图7,可以看出,滤波算法对于噪声的过滤整体上表现良好,但是,在噪声极值比较大的区域,算法易受极值的影响。
3.5 滤波结果对比
前文已经对三种滤波方法进行了验证,本节主要针对这三种滤波方法从以下两个方面进行滤波效果分析对比:
1. 滤波过滤效果;
2. 数据处理稳定性。
3.5.1 滤波效果对比
图8分别使用三种方法对滑行过程曲线进行了滤波处理,可以看出,最小二乘滤波、小波滤波和滑动均值滤波均表现良好。通过观察滑行段22-30s的局部数据容易得出,小波滤波和最小二乘滤波后信号更为平稳,不易受局部极值的影响,而滑动平均值滤波算法更易受极值影响。
3.5.2 滑行数据处理稳定性对比
在第1节中介绍了滑行试验方法及数据精度评价方法,在本小节,使用4组滑行数据,每组包含十条质量较差的滑行数据,将数据使用不同滤波方法进行处理,并将原数据作为对照组进行数据稳定性对比。
由公式(8)可知,在试验次数相同的情况下, 为常数,因此基准车速的统计精度pi可简化为:
以p作为评价指标,对三种滤波算法的数据稳定性进行对比,p越小则统计精度越高,数据稳定性越好。
表2是四组滑行数据的平均统计精度对比,可以看出,使用滤波算法后,数据稳定性都有着明显的提升。其中最小二乘滤波表现最为优异。
4 总结
道路滑行载荷测量准确度与速度-时间曲线的测量精度有着很重要的关系,提升VBOX在不利条件下的数据稳定性有着重要意义。本文通过研究标准试验方法,建立汽车滑行动力学模型,提出以测量数据的统计精度作为滤波算法稳定性对比的评价指标,并对三种滤波算法滤波效果做了研究和对比,主要结论如下:
(1)三种滤波算法对于滑行试验数据稳定性都有着明显的提升。
(2)单独的滑行工况,最小二乘法滤波表现最为优异。
(3)复杂工况下,小波滤波和滑动平均滤波都可进行较好的滤除噪声信号,但是小波滤波算法不易受极值影响。
参考文献:
[1]赫圣杰,唐晓莉. 汽车滑行阻力数据处理方法及软件实现[J].汽车工程师,2015, (12):33-36.
[2]朱卫东,刘学琼,田勇.汽车滑行阻力系数的测定方法研究[J].汽车技术,2010(06):40-42.
[3]刘福才,潘江华,韩宗奇.基于遗传算法的汽车滑行阻力系数测定方法[J].汽车工程,2003,(06):610-612+616.DOI:10.19562/j.chinasae.qcgc.2003.06.021.
[4]张德丰编著.MATLAB小波分析[M].机械工业出版社.2012.
[5]张舒瀚. 基于自适应迭代最小二乘滤波和多尺度分解的多模态医学图像融合算法[D].吉林:吉林大学.2022.
[6]liuzheng08.小波变换详解. [DB/OL].[2023.5.21]. https://blog.csdn.net/liuzheng081/article/details/95948725/.
[7]环境保护部、国家质检总局.GB18352.6-2016轻型汽车污染物排放限值及测量方法(中国第六阶段)[S].北京:中国环境出版社.2017.
[8]国家市场监督管理总局、中国国家标准化管理委员会. GB/T27840-2021重型商用车辆燃料消耗量测量方法[S]. 北京:中国质检出版社.2021.
[9]张仕森,孙宪坤,尹玲,李世玺.基于小波降噪和神经网络的GPS高程时序预测模型[J]. 全球定位系统,2019,44(03):117-125.
王 斌
毕业于武汉理工大学 ,自动化专业,大学本科学历,现就职于国家汽车质量检验检测中心(襄阳),任整车性能试验技术主管工程师,主要研究方向:整车性能试验技术研究。
专家推荐语
张 旎
东风汽车集团有限公司研发总院 质量验证中心
高级工程师
本研究通过对滤波算法的研究,提升了滑行数据的稳定性和精度,为后续滑行阻力计算提供了有力支持。通过对滤波算法的研究,有效降低了滑行组数,节省了滑行试验的人力和物力,值得业内借鉴。