仿蜈蚣式输料管道磨损检测技术研究
2024-07-11 04:15:07贾宏杰张志万姜辛马海飞高亮王思宇
有色冶金设计与研究 2024年3期
关键词:检测仪
贾宏杰 张志万 姜辛 马海飞 高亮 王思宇


〔摘 要〕针对精矿输料管、矿浆管道磨损严重、磨损时不易检测的现状,基于仿生学技术以绿色高效、低成本为设计理念,结合蜈蚣的躯体构造和运动特点,设计了一种仿蜈蚣式管道检测仪。通过对检测仪进行统一控制系统设计、分动并联式设计以及模块化设计,完成了总体的设计方案。该系统地设计了仿蜈蚣式管道检测仪的结构和布局,并介绍了工作原理,通过运动学理论计算得出了检测仪有独立的运动特性。利用ADAMS运动仿真软件,对检测仪进行运动学仿真分析,分析结果表明:检测仪动态性能良好,运行平稳,设计合理。对仿蜈蚣式管道检测仪进行样机制造,验证了检测仪结构的合理性和运动的稳定性。
〔关键词〕仿蜈蚣式;输料管;检测仪;动力学仿真;样机制造
中图分类号:TH132 文献标志码:B 文章编号:1004-4345(2024)03-0042-05
Research on Wear Detection Technology of Centipede-like Material Conveying Pipeline
JIA Hongjie, ZHANG Zhiwan, JIANG Xin, MA Haifei, GAO Liang, WANG Siyu
(Jinchuan Group Tonggui Co., Ltd., Jinchang, Gansu 737100, China)
Abstract In response to the current situation of serious wear and difficult detection of concentrate conveying pipe and slurry pipe, according to the bionics-based technology, taking green and high efficiency and low cost as design concept and combing with the body structure and movement characteristics of centipedes, a centipede-like pipe detector is designed. The overall design plan has been completed by the design of the unified control system, split parallel design, and a modular design of the detector. In this paper, the structure and layout of a centipede-like pipeline detector are systematically designed, and its working principle is presented. It is calculated by kinematic theory that the detector has independent motion characteristics. The kinematic simulation analysis is conducted on the detector by using ADAMS motion simulation software. The analysis results show that the detector had good dynamic performance, stable operation, and reasonable design. The rationality of the detector structure and the stability of its motion are verified by manufacturing the prototype of the centipede-like pipeline detector.
Keywords centipede-like style; material conveying pipe; detector; dynamic simulation; prototype manufacture
收稿日期:2023-10-14
作者简介:贾宏杰(1974—),男,工程师,主要从事冶炼生产技术工作。
仿生学是一门根据模拟生物系统的结构、行为以及相互作用,为工程技术提供新的设计思想、工作原理和系统构成的技术科学。在冶炼领域中,通过仿制天然材料或利用生物学原理,设计和制造出具有生物功能或生物活性的材料(具有天然材料所不具备的超常物理特性),用以替换当代冶炼工业中常见的钢铁﹑橡胶和陶瓷等材料,从一定程度上提升了现有材料﹑工具以及设备的性能指标;同时还借鉴生物在信息感知和运动方面的特性,研制出新型信息传递装置,提高了信号的采集精度、广度,扩大了适用范围。该技术对于冶炼生产状态的实时监测与控制水平的提高、大数据处理能力和智能化水平的提高也具有很大的优势。
精矿输送管道及矿浆输送管道在实际生产中由于输送介质压力大小及输送管线布置不同导致管道内磨损程度不一样,加之输送物料的沉积导致管道壁厚不一致,影响检测数据的准确性。本文基于仿生学技术与设计方法,通过分析蜈蚣的躯体结构和运动特点,研制出一种新型的仿蜈蚣式检测仪。以下拟通过对该检测仪总体设计思路、工作原理进行理论分析,证明其有独立的运动特性;再通过三维仿真软件ADAMS对检测仪进行运动学仿真和样机制造,验证该检测仪结构的合理性和运动的稳定性。
1 仿蜈蚣式检测仪设计
1.1 总体方案设计
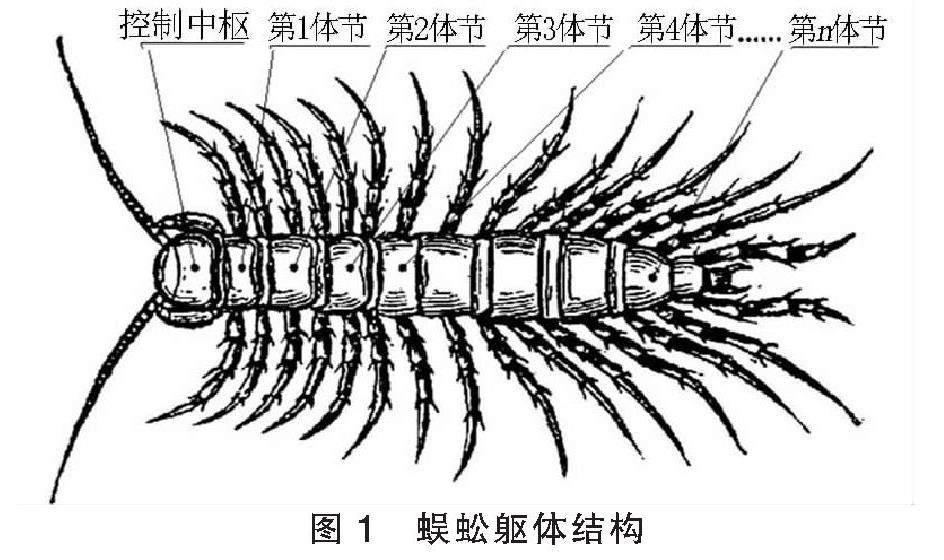
蜈蚣属于陆生节肢动物,每一对足都有一个独立的运动单元和独立的神经节,每对神经节又通过发出神经来调节身体活动。该结构具有很高的独立运作能力,可以适应各种环境。蜈蚣躯体结构如图1所示。
根据蜈蚣躯体结构,模拟其运动的灵活性,本文提出了以绿色设计为理念、并行设计和模块化设计为核心的设计方案。该设计基于蜈蚣的躯体构造和运动特点,以蜈蚣的控制中枢为检测仪的控制系统,每一体节为一组模块,形成一种用于测量输料管内径的、可拆卸性好、可维护性高、耗材少、独立性好、模块化程度高,对环境友好,又可以循环使用的仿生设备。其总体方案示意如图2所示。
1.2 整体结构设计
基于上述总体方案,该检测仪的结构设计如图3所示。
仿蜈蚣式检测仪由一个控制系统(图中未画出)、若干个测量模块、上护帽、下堵头以及外壳体组成。每组模块的结构与蜈蚣体节相似,除了空间布局不同,其内部结构完全一致。当某一模块发生故障时,其他模块仍然可以正常运行。每一组模块中的检测臂结构、功能完全相同,且多采用标准件,这保证了该结构的高度互换性,在满足正常功能的前提下,可以提高检测仪的现场适用性和降低维修成本。
1.3 检测模块空间布局
根据总体结构设计,检测仪设置有3组独立的检测臂,每一组检测臂都可独立运动,互不影响,故而解决了传统检测仪的检测臂只能同时伸展和收缩的问题,提高了测输料管内径的时效。多组检测臂的安装极其方便,采用分动式设计,即同一外壳体内放置多组检测臂,按同轴放置在外壳体内部的相应位置,并固定安放。各组检测臂都以固定的角度在空间中错开安装,错开角度度数为180/n(n表示独立检测臂的组数)。检测臂安装的组数,则由工程实际要求具体来定。该检测臂空间位置布局如图4所示。
1.4 单组检测臂结构设计
单组检测臂的设计其结构如图5所示。检测臂内的运动模块主要由步进电机、联轴器、丝杠、推杆、传感器固定座以及步进电机固定座等组成。
检测臂由步进电机驱动,通过联轴器将扭矩传递给丝杠。当丝杠转动时,由于顶端推杆固定座是固定的,底端推杆固定座将水平移动,以此来推动推杆,使得传感器固定座在径向方向张开或收缩。
1.5 防护固定装置设计
防护固定装置设计如图6所示。该防护固定装置主要由外壳体、上护帽以及下堵头3部分组成。外壳体表面设置有若干个缺口,每1组缺口都互成180 °设置,有几组独立的检测臂便设置与之相对应的缺口,缺口的空间角度的位置设置和前面所述检测臂角度设置一样。该缺口可供检测臂从壳体内部向外伸展并向内收缩,从而避免了检测仪在下放和上提时,机体与管壁发生碰撞而发生损坏。
2 检测仪工作原理及运动学分析
2.1 检测仪工作原理
检测仪的工作流程图见图7。
当检测仪开始检测时,将检测臂调整为收缩状态,下放至套管内。在下放的过程中,步进电机始终处于未工作的状态。当下放至所需要检测的位置时,相对应的驱动器驱动步进电机开始工作,步进电机带动丝杠转动,底端推杆固定座向顶端推杆固定座方向移动,从而检测臂通过外壳体表面的缺口伸展出来,并继续运动,直到传感器底座触碰到套管内壁时,限位开关接收到信号并将信号发送给控制器,控制器将信号发送给驱动器,驱动器控制电机停止工作,此时开始记录数据。在该位置测量完毕后,控制器发出信号给驱动器,驱动器控制步进电机反转,检测臂收缩,在底端推杆固定座下降至底部触碰到底端限位开关时,限位开关将信号反馈给控制器,控制器控制步进电机停止工作,检测仪回到初始时的收缩状态。同理,如需再次进行测量,只需要将检测仪上提或下放到需要测量的下一个位置,重复以上动作,再次记录数据。如不需要再次进行测量,只需要将检测仪上提至初始位置,测井完毕。
2.2 检测仪运动学计算
为了保证该检测仪具有确定的运动,需计算该系统的自由度。推靠系统运动见图8。
由图8可知,此系统具有 5 个活动构件,6 个低副,1 个高副,故机构的自由度为:
F=3n-(2Pi+Ph)。
式中:n为杆件数,Pi为低副,Ph为高副。计算得:F=2。
由机械原理可知,如果系统的自由度数目等于系统的原动件数目,则系统会有确定的运动。如果系统没有满足这个条件,当系统的自由度数目小于系统的原动件数目,系统最薄弱的构件将会被损坏。当系统的自由度数目大于系统的原动件数目,则系统的运动会完全不确定。但本次设计中检测仪有两种运动状态,即推靠系统收缩运动状态和检测运动状态,由于传感器固定座只会以竖直的姿态向其他方向运动,而且不会进行转动,因此对传感器固定座竖直姿态的约束相当于1个低副,因此打开运动状态的自由度为:F=1。
测量过程中,电机停止运动,丝杆也停止转动,系统的活动构件变为了4个,5个低副,1个高副,因此,测量运动状态的自由度为:F=3×4-(2×5+1)=1。
综上所述,该分动式六臂检测仪在收缩运动状态和检测运动状态都有确定的运动。
检测臂在收缩状态下,如图9(a)所示。已知AB=
A'B'=CD=C'D',BC=B'C',设初始位置时,AD之间的距离为Sb(实际测量可得出Sb=300 mm),传感器固定座两中心孔之间的距离BC=B'C'=hv,两推杆AB =CD=A'B'=C'D'=b(实际测量b=150 mm),从初始位置开始到测量状态完毕时,螺母移动的距离DD'=l。
检测臂在检测过程中的运动简图如图9(b)所示,已知B'C'=E'F',A'B'=C'D',B'F'=C'E',A'F'= D'E',设检测状态时,沿丝杠中心两推杆中心孔之间的距离A'D' =Se,传感器固定座两中心孔之间的距离B'C'=E'F'=hv(实际测量得hv=30 mm),固定座中心孔到丝杠之间的距离B'F' = C'E'=a。本次设计可以检测的输料管直径的范围为110~330 mm。
图9 检测臂收缩、打开简化示意
步进电机是一种将电脉冲转换为角位移的执行机构,通过控制脉频率来控制电机的转速,可以通过脉冲的个数来获得电机所运行的时间,当选择了步进电机后,它的细分倍数和固有步进角均为已知,故通过计算可得步进电机轴的转速为:
n=f×60/[(306/T)×X]。
式中:n为步进电机转速,rad/min;f为控制电机的脉冲频率,Hz;T为步进电机的步进角,(°);X为步进电机的细分倍数。
丝杠螺母之间的传动,主要实现旋转运动与直线运动之间的相互转换,主要的作用是用于机构之间运动形式的传递。已知电机通过联轴器带动丝杠旋转,中间再无其他传动部件,因此,电机轴的转速也就等于丝杠的转速,电机所运行的时间即等于丝杠转动的时间,已知丝杠的螺距为,则可求得螺母在丝杠上所移动的距离为:
l=n×p×t/60。
式中:t为丝杠转动的时间,s;为丝杠的螺距,p=4 mm。代入以上数据即可得出输料管内径d的大小。
A'F'=150-0.5×l ;
l=f×t×T/2 880 ;
BF=;
d=2× BF。
2.3 检测仪运动仿真分析
验证结构设计的合理性和可行性,需要对其进行运动仿真分析。本文利用ADAMS仿真软件对仿蜈蚣式检测仪进行运动仿真分析。
检测仪的运动主要是在检测臂的打开与收缩的2种运动的过程中,因此仿真前将检测仪模型进行简化,去除外壳体、步进电机等一些固定的零件。简化模型如图10所示。
根据检测仪的工作原理,在检测臂丝杆的旋转副上添加运动函数为:
Function=3 000 d×sin(×t)。
在此驱动函数的驱动下,设置仿真时间为t=5 s,step=100进行仿真。其ADAMS设置结果如图11所示。
对仿真结果进行求解,得出运动螺母、传感器底座的位移曲线,如图12、图13所示。运动螺母和传感器支座的速度曲线如图14、图15所示。
由位移—时间、速度—时间曲线可见,当步进电机驱动丝杆螺母,同时带动推杆及传感器底座运动时,位移和速度平稳变化,表明在此过程中零部件传动平稳,没有速度的急速变化带来的冲击,验证了设计的合理性及符合实际工作的要求。
3 检测仪样机试验情况分析
为了完成该装置的原理设计及通过性检验,按照实际大小的 1:1制作了检测仪的一段测量模块,如图16所示。在平面状态下,对该检测仪进行简单的运动测试,检查运动过程中是否存在干涉等现象。再进行管道内径测量实验与调试,通过对检测仪在不同形状、不同材质的管道中内径的测量,对越障车运动情况进行校验及改进。经过实际调试,检测仪运转情况良好,符合预期设计要求,验证了检测仪结构的合理性和运动的稳定性。
4 结论
利用仿生学技术,结合蜈蚣的躯体特征和运动特性,对检测仪总体方案进行设计。按照总体的设计方案,建立了仿蜈蚣式检测仪的三维模型。通过对检测仪的工作原理进行介绍,利用运动学理论得出了检测仪运动具有独立性。通过ADAMS三维仿真软件对检测仪的运动学进行分析,以及检测仪样机制造的实践检验,验证了检测仪结构的合理性和运动的稳定性。综上,该检测仪的动态性能良好,运行平稳,设计合理,在精矿输料管、矿浆管道磨损严重、磨损时能够实时地测量套管内径来反映管道的磨损、腐蚀、破损及其他变形情况。
参考文献
[1] 张瑜都,孔文琼.喷浆材料管道输送的三维数值模拟[J].工业加热,2018,47(4):36-37.
[2] 马涛. 一种新型柔性仿人机械手的优化设计研究[D].天津:河北工业大学,2020.
[3] 方誌.气力输送系统变径管道系统设计的研究[J].建设机械技术与管理,2022,35(4):54-56.
[4] 席文奎,彭蒋伟,姜辛,等. 一种分动式多臂井径测井仪:CN111287736A[P]. 2020-06-16.
[5] 席文奎,姜辛,王燕玲.一种自动旋转式井径测井仪:CN111411940A[P].2020-05-14.
[6] 黄芬霞,靳世平.管道内颗粒气力输送的研究现状与热点分析[J].中国粉体技术,2017,23(5):87-92.
[7] 王晓品,林伟强,谢如楠.自适应绿色节能管控系统设计[J].电子制作,2020(17):3-5.
[8] 李振. 火电厂中速磨煤机石子煤负压气力输送系统设计[D].北京:华北电力大学,2012.
[9] 任涛,张飞,张春琳,等.新型分动式六臂检测仪推靠系统运动学及动力学分析[J].机械传动,2019,43(6):117-124.
[10] 张飞.分动式六臂检测仪设计及推靠系统性能研究[D].西安:西安石油大学,2019.
[11] 董中华.气力输送系统及其设计[J].化工装备技术,2016,37(3):5-8.
[12] 蔺茂辉.气力输送机管道材料对输送能耗的影响[J].技术与市场,2014,21(6):96-97.
[13] 刘洛航. 猪舍饲料气力输送系统设计及管道冲蚀磨损研究[D].南昌:江西农业大学,2021.
猜你喜欢
中国特种设备安全(2019年8期)2019-10-14 00:32:20
电子制作(2019年7期)2019-04-25 13:16:56
电子测试(2018年10期)2018-06-26 05:54:16
电子制作(2017年20期)2017-04-26 06:57:32
中学生数理化·中考版(2017年11期)2017-04-18 11:14:29
电子制作(2016年19期)2016-08-24 07:49:36
电测与仪表(2016年21期)2016-04-11 12:44:42
汽车维修与保养(2015年8期)2015-04-17 03:33:03
机械制造与自动化(2014年1期)2014-03-01 04:22:00
河南科技(2014年12期)2014-02-27 14:10:40