
无人机倾斜摄影在产业园区三维测图中的应用
2024-07-07 19:14:41吴卉颖全昌文
科技创新与应用 2024年18期
吴卉颖 全昌文

摘 要:倾斜摄影为地形三维测图创造条件,能够有效减少外业工作,提升作业效率。该文以产业园区为例,基于无人机倾斜摄影技术,构建园区高分辨率实景三维模型,进行大比例尺地形图三维采集作业,并开展空三精度评价和地形图精度评定,结果表明,该作业方法能够达到1∶500地形图的生产精度要求,为类似项目开展提供参考。
关键词:三维测图;倾斜摄影;地形图;无人机;实景三维模型
中图分类号:P23 文献标志码:A 文章编号:2095-2945(2024)18-0169-04
Abstract: Oblique photography creates conditions for 3D topographic mapping, which can effectively reduce field work and improve operational efficiency. Taking the industrial park as an example, based on the UAV tilt photography technology, this paper constructs the high-resolution 3D model of the park, carries out the three-dimensional collection of large-scale topographic maps, and carries out the spatial three-precision evaluation and topographic map accuracy evaluation. the results show that this method can meet the production accuracy requirements of 1virtual 500 topographic map and provide reference for similar projects.
Keywords: 3D mapping; oblique photography; topographic map; UAV; realistic 3D model
产业园区是区域经济发展、产业调整升级的重要空间聚集形式,一般分布在城市周边特定规划区域。园区地形数据是城市基础地理信息数据的重要组成部分,在城镇规划、市政管理、工程建设和应急救援等领域发挥着广泛应用[1]。近年来,随着无人机航摄技术的迅速发展,单一视角的垂直摄影快速转变成多视角的倾斜摄影[2],形成的三维立体成果能够真实反映客观世界原貌,为三维地形测绘创造了便利条件。
倾斜摄影技术颠覆了传统地形测绘的作业模式[3],极大地提高了内业判图的准确性,大幅减少了外业调绘的工作量,三维测图已经逐渐成为当前城区地形测绘的主要技术手段。文献[4]从像控密度、模型分辨率和测图方式等方面对大比例尺三维测图进行了研究;文献[5]探讨了如何运用二、三维联动方式开展大比例尺地理要素测绘和更新;文献[6]对基于倾斜摄影技术生产大比例尺地形图进行了技术可行性验证和成果精度可靠性检测;文献[7]采用无人机倾斜摄影的方法,对大比例尺地形图要素更新进行了实际应用和研究;文献[8]以农村房屋地籍调查工作为例,提出一种针对消费级无人机的大比例尺地形图测绘方案并进行了实践;文献[9]分析对比了3款主流地形图采集软件,为基于倾斜摄影技术的三维测图提供了技术指导。
本文结合倾斜摄影的技术适用性,提出采用多旋翼无人机获取产业园区多视角影像,通过建模软件构建园区实景三维模型,并在三维测图平台上开展园区地形要素采集,为项目提供了符合精度要求的1∶500地形图成果数据。
1 倾斜摄影技术
1.1 技术原理
倾斜摄影是指同一飞行平台搭载多个传感器,在空中从不同方位同步采集多角度影像,结合位置、姿态、地面控制等数据,利用多视影像匹配和平差算法生成高精度实景三维模型、真正射影像(TDOM)、数字表面模型(DSM)等产品的摄影测量技术。相比传统的摄影测量,倾斜摄影能够获取到更加丰富的侧面纹理等信息,构建的三维模型能够全方位、立体化还原地物地貌特征。
1.2 优势特点
倾斜摄影技术改变了传统地形测绘作业方式,当前主要采用无人机飞行平台进行影像获取,采用三维测图系统进行地形地物要素采编,再以少量外业补测、调绘等工作进行辅助成图。相对于解析法、航测法[10]等地形测绘方法,无人机倾斜摄影具有以下优势特点。
1)灵活性:无人机倾斜摄影可以在复杂、多样的环境下快速获取影像,具有较强的适应性和灵活性。
2)高效性:基于无人机倾斜摄影的三维测绘速度更快,可以同时获得大量数据,提高数据采集效率。
3)成本低:构建的实景三维模型是真实世界的客观反映,能够大幅减少外业测绘工作量,成本更低。
4)精度高:相比航测法,倾斜摄影采集影像空间分辨率更高,有助于获得更加精准的地形地物信息。
2 基于倾斜摄影的三维测图技术路线
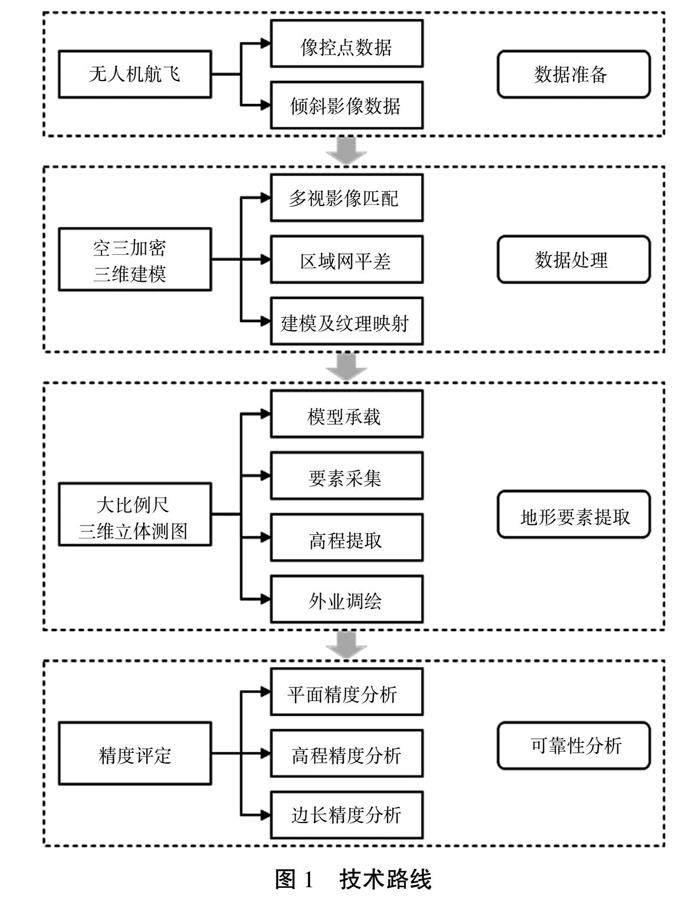
基于无人机倾斜摄影的三维测图,主要包括准备工作、像控测量、航空摄影、空三加密、三维建模、地形要素采集、外业调绘和精度检核等工作。开展三维测图的技术路线,如图1所示。
3 应用案例
3.1 园区概况
本文以某市城郊产业园区为例,面积大小约0.5 km2,属丘陵地形,园区内主要地物有建筑物、道路、沟渠、电力线等,植被覆盖较少,平均海拔30 m,最高处约50 m,最低处15 m,园区整体地貌情况如图2所示。成图精度按照CJJ/T8—2011《城市测量规范》中1∶500成图比例尺地形精度要求开展,其中平面位置点位中误差为±25 cm,相邻地物点平面位置中误差为±20 cm,高程注记点点位中误差不应大于15 cm。
3.2 像控测量
为保证空三加密精度,航摄前事先布设像控点位。采用区域网布点方式,测区整体每间隔250~300 m布设1个像控点,中间布设少量检查点,共布设像控点10个,检查点3个。控制点位采用网络RTK测量,网络选择GXCORS;每个点位重复观测3次,在观测过程中,确保卫星高度角大于等于15°,有效观测卫星数大于等于6颗,观测历元数为60,标高取位至0.001 m。像控点高程采用似大地水准面转换为正常高。
3.3 倾斜摄影
园区范围较小,结合项目实际,采用D200多旋翼无人机搭载五镜头相机开展倾斜影像数据获取,下视镜头固定焦距为25 mm,侧视镜头固定焦距为35 mm,像元大小为3.9 μm。航线设计主要参数为:地面分辨率1.5 cm、航向重叠率80%、旁向重叠率75%,飞行高度130 m。采用东西方向敷设航线,测区飞行范围外扩130 m。因设定采集的影像分辨率高,为保证影像精度及清晰度,无人机飞行速度降低为8 m/s。实际飞行2个架次,共获取影像8 945张,经数据预处理、GPS数据差分解算后,得到用于三维建模的影像数据和高精度POS数据。
3.4 空三加密
目前市面上用于开展实景三维加密和构建模型的软件较多,如Smart 3D、Mirauge 3D、Context Capture和PhotoScan等。本文采用PhotoScan开展空三加密及建模,该软件实现了自动提取影像特征匹配点、整体平差一体化的自动空中三角测量。将外业像控点逐一转刺到各不同视角照片上,进行控制点加密解算,获得高精度的定向点。空三加密的定向点精度至关重要,只有经过检核符合精度要求的才能够提供下一步工序使用,否则应进行分析查找精度超限的原因。经检查,本项目10个定向点、3个检核点均符合精度要求。
3.5 三维建模
模型构建依次按照密集点云生成、TIN模型构建、模型三角网优化和纹理自动映射4个步骤开展。在高精度空三加密成果的基础上,生产基于影像的超高密度点云数据,基于点云构建TIN模型并进行三角网优化,以此生产高分辨率实景三维模型。三维重建时需要对水面等情况进行填充,避免出现漏洞,模型分块大小按照50 m间隔设置,输出OSGB格式成果,同时输出真正射影像数据(TDOM)。
3.6 地形图要素三维采集
EPS三维测图系统具有强大的图形采集、编辑功能,提供了基于实景三维模型(OSGB)、点云(LAS)、DOM、DEM等多源异构数据的二、三维采编工具,数据加载快、采编效率高,能够实现制图建库一体化,其核心模块在于三维测图。本文综合采用拟合直线、直角推算、平行推边和直线相交等多种技术方法,在园区三维模型和TDOM成果基础上开展1∶500地形图生产,其主要步骤如下。
3.6.1 加载数据
EPS无法直接打开OSGB格式的三维模型,需要结合模型瓦片对应的xml文件,将其转换生成实景表面模型DSM文件,才能在系统中显示出来。先后加载对应的DSM和TIF文件,EPS以窗口联动的方式同步显示二维影像和三维模型,采集人员裸眼即可实现地形要素的采集操作,与以往立体像对采集不同的是,这种方式无须佩戴立体眼镜。
3.6.2 地形要素采集
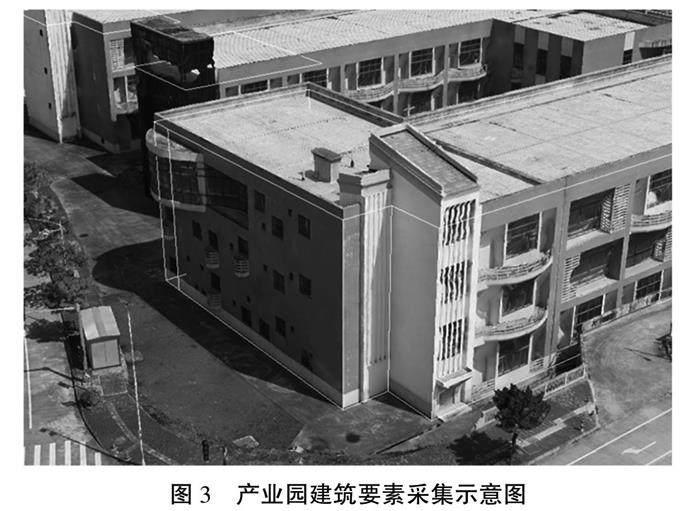
实景三维模型是现实世界的直观反映,可从多角度观察同一地物,空间位置精度高,能够实现精准量测。相对于传统的立体像对采集方式,在内业能够解决大部分房檐改正及部分遮挡地物的绘图问题,减少了外业调查、补测的工作量,采集效率得到进一步提升。三维地形要素采集同样遵循先整体后局部的绘制思路,产业园区主要地物有道路、厂房、沟渠、管线、陡坎和植被等要素。绘制厂房等房屋时,依据不同形状采用不同绘制方法,如五点法、多点法等,优先选取建筑立面清晰平整的最佳位置进行轮廓绘制,如图3所示;规则无遮挡的道路可以采用平行线法快速绘制道路边线。对内业无法确认、有疑问、需补测的要素及时进行标记,采用外业调绘和补测手段完善图形要素。
3.6.3 调绘和补测
园区遮挡较少,调绘内容主要是园区企业名称、道路名称、管线类型和沟渠水流走向等,对少量遮挡地物和漏测地物采用RTK结合全站仪进行现场快速补测。采集后的地形图成果,经过属性录入、空间逻辑一致性、拓扑一致性等检查处理后,进行标准分幅,按要求输出地形图成果。EPS三维测图系统可以输出DWG、MDB等不同格式的地形图数据。
3.7 精度评定
为检验地形图成果精度,采用外业实测散点的方式进行验证,主要验证地形要素的绝对位置精度和相对位置精度2方面。具体采用GNSS-RTK设备获取地物点位置,采用激光测距仪量取地物点间距。实地抽取两幅图进行地物点位置精度和间距精度检测。检测平面点66个,平面位置中误差0.045 m,最大平面位置误差0.086 m;检测高程点66个,高程位置中误差0.048 m,最大高程误差0.090 m;检测相邻地物点间距40条,边长中误差0.053 m,最大边长中误差0.068 m,满足1∶500大比例尺地形图的精度要求。
4 结束语
本文以产业园区为例,基于无人机倾斜摄影技术,构建了高分辨率园区实景三维模型,进行大比例尺地形图三维采集作业,并开展了空三精度评价和地形图精度评定,结果表明,该作业方法能够达到1∶500地形图的生产精度要求。实例中产业园区植被覆盖较少,遮挡地物不多,适合采用倾斜摄影技术开展三维测图,作业过程更直观、形象,能够减少野外工作量,提升作业效率。需要注意的是,文中采集了1.5 cm的超高分辨率原始影像开展实验,有效确保了空三加密精度、三维模型的清晰度和空间位置精度,但无人机飞行高度低,不适合高层建筑区域作业,同时也带来了数据量大影响建模效率的问题,这些局限将随着传感器硬件提升、轻量化三维建模等技术发展而逐步得到解决。
参考文献:
[1] 原明超,仇俊.无人机倾斜摄影测量在三维模型测图中的应用[J].测绘通报,2020(7):116-119.
[2] 付主俊.无人机倾斜摄影在建筑物立体测量中的应用[J].北京测绘,2019,33(7):839-842.
[3] 郑瑜,潘成军.融合倾斜摄影和LiDAR点云测制大比例尺地形图的应用[J].测绘通报,2022(S2):241-244.
[4] 朱轶群,吴煜心,金国建,等.基于倾斜摄影的三维测图技术研究[J].测绘通报,2020(10):48-52.
[5] 杜洪涛,郭敏,魏国芳,等.基于无人机倾斜摄影技术的大比例尺地形图测绘方法[J].城市勘测,2018(6):63-66,81.
[6] 曹宁.无人机倾斜摄影测量技术在大比例尺测图中的应用及精度评价[J].测绘与空间地理信息,2020,43(8):174-176.
[7] 泮建伟.基于无人机倾斜摄影的1∶500地形图要素更新应用研究——以浙江松阳县为例[J].测绘与空间地理信息,2021,44(10):211-214.
[8] 许承权,黄小琴,施政.消费级无人机倾斜摄影测量1∶500测图方法及精度研究[J].测绘地理信息,2020,45(1):117-120.
[9] 马旭文,徐柳华.基于倾斜摄影三维模型的大比例尺地形图测图软件比较与分析[J].测绘与空间地理信息,2020,43(2):57-59,62.
[10] 焦旭,王贺封,张安兵,等.航空摄影测量在矿区1∶2 000地形图测绘中的应用研究[J].河北工程大学学报(自然科学版),
2015(3):105-109.
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
西部交通科技(2021年9期)2021-01-11 12:55:36
浙江国土资源(2019年10期)2019-10-31 03:17:00
建材发展导向(2019年10期)2019-08-24 06:25:28
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
中国公共安全(2017年7期)2017-10-13 08:18:11
北方音乐(2017年4期)2017-05-04 03:40:09
电子制作(2017年9期)2017-04-17 03:01:00
